无人机自力起飞方式研究
2019-06-14 09:25叶帅辰姚晓先
火力与指挥控制 2019年4期
叶帅辰,姚晓先
(北京理工大学宇航学院,北京 100081)
0 引言
无人机的概念是美国在20世纪20年代提出的,世界上第一架无人机“Kettering Bug”由美国陆军通讯部队(Army Signal Corps)于1918年研制成功,最初无人机的作用较为单一,常被作为航空炸弹使用。在第二次世界大战期间,无人机又被作为试射靶机。直到20世纪70年代,侦查无人机和通讯无人机的概念才被逐渐提出[1]。
经过数十年的发展,无人机已经成为现代战争中不可或缺的一部分,越来越多的国家开始将其投入战场,利用无人机开展攻击、侦查等作战任务。除了军用之外,无人机近几年在民用领域,如运输、灾害预测及监控、建筑物维护、地形测绘等,也得到了迅猛的发展[2]。
在无人机的实际应用中,起飞和着陆两个阶段尤为重要,特别是无人机起飞方式的选择,因为它直接决定了无人机系统的机动性、重复使用性、环境条件适应性及使用成本[3]。无人机具有多种起飞方式,如手抛、弹射、火箭助推和潜射等,一般来讲可按照无人机起飞升空时是否需要外部设备提供动力,将无人机的起飞方式分为自力起飞和他力起飞两大部分。本文侧重于介绍无人机的自力起飞方式。
自力起飞是指无人机在起飞时所需的动力由机上携带的设备提供,如发动机、旋翼或助推火箭等。对于外部供能设备的依赖性较小,大多情况只需外部设备提供支撑。自力起飞主要包括火箭助推发射,滑跑起飞和垂直起飞等几种类型。
1 火箭助推发射(零长发射)
火箭助推发射是指将无人机放置在零程或短程导轨上,在1台或多台火箭发动机的推力作用下短时间内加速升空,当飞机起飞后抛掉助推火箭外壳,由无人机的自身主发动机(通常为涡喷发动机)产生的推进力完成后续的侦查或打击任务。这种发射方式可以发射大、中型无人机(质量100 kg~500 kg)并且占地面积小,可以满足战场上的机动性、快速性需求。但由于其火控发射的特点,在发射时必然会产生大量火光及烟尘,容易对操纵人员产生伤害并暴露目标。另外,在每次发射时都会抛落1~2枚火箭推力器,使得制作成本大幅增加。此种发射方式较为成熟,多种型号的无人机都在采用。如德国/加拿大的CL-289型单助推火箭式无人机,英国的“小猎鹰”双助推火箭式无人机,以色列的“哈比”型号无人机及和南非的“百灵鸟”反辐射无人机等。2010年,以色列在“哈比”无人机的基础之上研发了新式自杀无人机“哈洛普”(如图 1)[4],其可携带 23 kg高爆破片战斗部,巡航时间可达6 h之久,从图中的发射过程可以看出,当飞机发射升空后两侧的助推火箭发动机外壳随即脱落。

图1 以色列“哈洛普”无人机
2 滑跑起飞
无人机的滑跑起飞方式与普通载人飞机类似。它是指将无人机安置在起落架(由于大部分情况下起飞后即将起落架抛弃,故又可称为起飞车)上,利用无人机上主发动机产生的推力推动自身加速前进,当达到一定速度时即可起飞。为了减小飞行时的载荷并且综合飞机降落位置环境不确定等因素,飞机起飞后即抛下起落架,降落方式再作考虑。只有少数超大型运载无人机才会带起落架飞行。这种起飞方式的优点是:可以起飞大型甚至超大型无人机,并且加速过程缓慢,飞机本身承受过载相对较小,可提高无人机的使用寿命,降低成本。但是其需要平整的跑道和良好的地面起飞环境,这会使得它的机动灵活性较差,不适合复杂多变的战场环境。美国的“捕食者(Predator)”、“秃鹰”,以色列的“苍鹭”,法国的“轻骑兵”,英国的“天眼”,巴西的BQM-1BR等型号的无人机都采用此种起飞方式。如图2所示为美国部队现役的“捕食者(Predator)”大型无人侦察机,其机身长8.13 m,翼展14.85 m,起飞负载可达到952 kg,这种飞机与普通的载人运输机类似,起落架固定于机身底部,当飞机起飞后并不将起落架抛弃。

图2 美国“捕食者”无人机
此外,为减小起飞时所需场地面积,也通常采用圆周跑道滑跑起飞。即将起飞车与一高强度长连杆固连,连杆另一端与固定于地面的基座通过轴承连接,使得连杆可绕基座轴线相对转动。当将无人机置于起飞车上时,机上主发动机产生的推力推动起飞车沿以基座为圆心、连杆为半径的圆做圆周运动。起飞车达到一定的滑行速度时,机翼产生的升力便可使无人机沿圆周切线方向起飞。
3 垂直起飞
垂直起飞是无人机众多发射方式中比较特殊的一种,甚至可以作为无人机研究领域中一个独立的分支。这是由于在其他无人机的发射方式设计过程中,并未考虑无人机的降落方式,而以垂直起飞方式发射的无人机绝大部分也以垂直方式降落。所以垂直起飞方式的无人机又可称为“垂直起降飞行器”。
垂直起降飞行器(VTOL)的准确定义为:飞行器能以零初速度起飞或着陆,可以在空中悬停,并且具有类似固定翼飞机的水平飞行能力。这种垂直起降的方式具有初速度小、安全系数高、对起飞或着陆场地要求较低等特点,所以除军用外,它还被大量地应用于运输、通信等民用领域。目前,90%以上的民用无人机都采用这种起降方式[5-6]。但是,正是由于这种垂直起降的特点,其在起飞的初始段或降落的末段易受到气流扰动的影响,进而出现翻机、摔机等现象,这就对其控制精度和气动力的计算提出了很高的要求。目前,有大批国内外学者正在对相应的控制律进行研究[7-12]。
垂直起飞方式种类很多,但大体可以分为两种:带有旋翼的垂直起飞和固定翼垂直起飞。
3.1 带有旋翼的垂直起飞
这种起飞方式是利用旋翼高速旋转时产生的升力使无人机竖直向上加速升起。在民用领域中多数无人机为此种类型。这其中,根据翼片起到的作用不同又可大致分为4种类型:
1)单一旋翼式:这种无人机只有旋翼,而无固定翼,旋翼数量可以为一至多个。其飞行过程中的机动性较好,高度调整方便,但由于缺少固定翼,会使巡航能力降低。典型的有美国的“火力侦察兵(RQ-8A 和 MQ-8B(图 3))”、俄罗斯的 ka-137无人机,以及近几年研发的加拿大CL-227“哨兵”无人机和德国希摩斯(Seamos)无人机等。

图3 美国“火力侦察兵”无人机
2)旋翼-固定翼复合式:该种无人机同时具有旋翼和固定翼及水平推力装置,在单一旋翼式的基础上大大提高了其水平巡航性能。典型代表为美国“龙勇士”无人机。
3)翼片转换式:图4为采用这种结构形式的美国波音 X-50A“蜻蜓(Dragonfly)”无人机,其典型特点是翼片较大,固定于飞机顶部,当旋转时可作为旋翼提供升力,而将其锁死后又可当作固定机翼以确保飞机进行有效的巡航。这种翼型由于其体积、质量较大,会导致转动惯量大,效率降低,故在现役的无人机型号当中所见不多。
4)升力换向式:这种形式的无人机使用较多,可以使升力和推力相互转换,其特点是在竖直上升阶段,旋翼产生的力用作升力,而在达到一定高度后可通过偏转机身的某些部位,使竖直方向的升力一部分转化为水平方向的推力。按照偏转部位不同又可分为:偏转旋翼式(Tilt Rotor)、偏转机翼式(Tilt Wing)、偏转涵道式(Tilt Ducted Fan)、偏转机身式(Tilt Body)和尾坐式(Tail Sitter)等。美国的“鹰眼”无人机(图5)就是利用的偏转旋翼式结构,这种无人机机长5.18 m,翼展4.6 m,最大起飞重量136 kg。采用中单翼布局,双垂尾内倾,左右翼尖装有可偏转的旋翼来实现推力换向,两副旋翼由布置在机身内的一台涡轮轴发动机驱动。

图4 美国波音公司的“X-50A蜻蜓”无人机

图5 美国贝尔公司的“鹰眼”无人机
利用升力换向式起飞的无人机种类还有很多,如近期研发的以色列“美洲豹(RQ-20A)”偏转旋翼无人机,英国“阿古斯塔AW609”无人机,美国贝尔和波音公司的“空中提包”尾坐式无人机等。近年来,美国阿古斯塔-韦斯特兰公司开发了一种Project Zero偏转旋翼-涵道风扇飞行器(下页图6),它在两个机翼上嵌入一组大型三叶旋翼,并直接以电机驱动。同时兼具起飞(降落)和巡航两种飞行模式,当其处于起飞(降落)飞行模式时,涵道风扇处于水平位置,可以提供垂直方向的升力,而处于巡航飞行模式时涵道偏转至竖直位置,可以提供前进推力。这种新概念飞行器全程仅以电力驱动,不需要其他任何发射装置,整体性强,操纵简单,为未来旋翼垂直起飞无人机提供了研究思路[13]。

图6 Project Zero偏转旋翼-涵道风扇飞行器
3.2 固定翼垂直起飞
带有固定翼的垂直起飞无人机是固定翼飞机中比较特殊的一类,其按照起飞时无人机的摆放方式又可分为两种。一种是在无人机起飞时,机身竖立,以垂直姿态放置于发射场上,由尾座支撑。典型的如以涵道式风扇发动机为动力源垂直起飞的美国“金眼”无人机和保留起落架、兼具滑跑起飞和垂直起飞能力的美国“XBQM-108A”无人机(图7)。
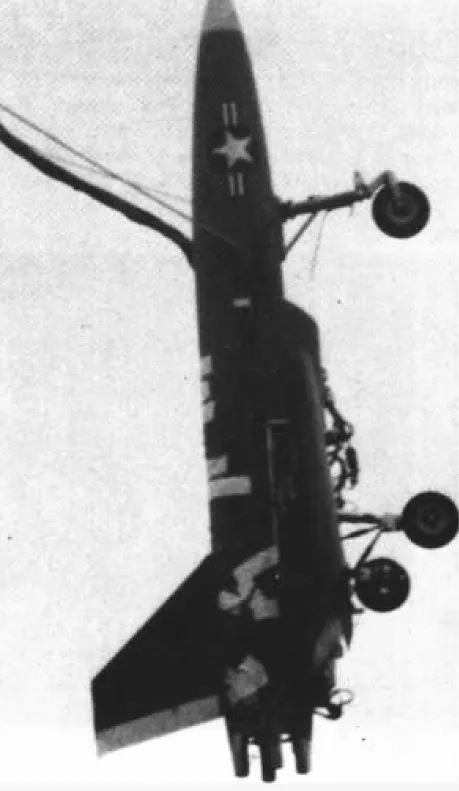
图7 美国“XBQM-108A”无人机
另外一种是无人机在起飞时水平放置,其机身下方装有涡喷发动机,借助推力矢量技术,在发动机的推力作用下实施起飞或降落。美国的OVA型、754型无人机,英国的“狼蛛-鹰Tarantula-Hawk”无人机及俄罗斯近些年研制的无风-3隐身无人机都属于此类。
4 基于作战平台的无人机自力起飞
除前文所述的无人机陆基自力起飞方式外,无人机还可搭载于某些作战平台上进行自力起飞,如航空母舰、运输机、潜艇等。
4.1 无人机的空基自力起飞
无人机的空基起飞是指通过载机携带无人机升空,再释放无人机的起飞方式。这其中能够实现无人机自力起飞的主要有挂载式和背负式两类。
挂载式是将无人机挂在载机的机翼下方,当载机达到一定飞行高度后自由投放无人机,之后无人机上的助推火箭点火,为无人机提供快速前进的动力。这种无人机的结构与前文介绍的火箭助推发射类似,都会产生大量的火光及烟尘,并且需要抛落助推火箭外壳。
背负式是将带有水平巡航翼片的无人机以一定仰角固定于载机机身上方,当载机以一定速度向前飞行时,无人机机翼产生的升力可自动将其与载机分离。这种起飞方式的优点是,无人机机身上不需要携带动力设备,可以使无人机的有效载荷重量最大化。但同时也会导致其缺乏机动性,可控性较差。
4.2 无人机的海基自力起飞
无人机的海基发射包括基于水面作战平台的舰载发射和基于深水作战平台的潜射。
基于水面作战平台的舰载发射可以选择多种自力起飞方式,如火箭助推发射,滑跑起飞和垂直起降等。这是由于水上舰船具有宽大平整的甲板,能够提供类似于陆基发射的良好起飞环境。但由于舰船的体积有所差别,可选择的自力起飞方式也会受到一些局限,如带有长直跑道的航母作战平台上多采用无人机的滑跑起飞,而中小型舰艇上多采用垂直起降或火箭助推发射等起飞方式,以节约作战空间。
无人机的潜射是一项比较特殊的发射技术,其涉及到水弹道技术、轻型抗压材料技术,电子元器件密封及防水技术等许多方面。并且潜射是一种自力与他力相结合的发射方式,他力环节表现为:装载无人机的密封运载器通过潜艇上自带的鱼雷发射管或导弹发射管发射离艇;而自力环节表现为:密封运载器上浮至水面后,无人机通过机身上携带的小型喷气发动机或旋翼提供的升力升空,实现后续作战任务。典型代表为美国“探索者”潜射无人机,其运载器通过553 mm鱼雷发射管发射离舰,上浮至水面后无人机通过垂直起飞方式升空。
5 无人机自力起飞技术国内外研究现状
目前,许多国内外学者对无人机自力起飞技术进行了大量的研发及分析。其中包括机械结构设计及仿真、动力学特性分析、控制律设计等多个方面。
2014年,乌克兰军队科学研究院的Valeriy Silkov[14]对滑坡滑跑起飞的无人机起飞段进行了动力学特性分析及优化,以使得其具有最大的能源利用效率。2015年,西北工业大学的吴成富等[15]将模糊控制策略引入无人机的滑跑起飞段中,并设计了相应的控制律。
2016年,南京理工大学的张俊等[16]借助ANSYS有限元分析软件对一种于滑轨上起飞的火箭助推发射无人机进行了动力学仿真分析,得到了其在整个起飞过程中的应力分布及各节点的速度、加速度变化曲线。南京航空航天大学的夏曼[17]设计了一种带有螺旋桨的无人机火箭助推发射装置,并利用PID方法对其模型的控制律进行了设计。
2017年,中国民航大学的陈昱玮等[18]设计了一种便携式零长发射小型无人机发射系统。南京航空航天大学的王程坤等[19]建立了带起落架无人机的地面滑跑模型,并对其进行了动力学建模与仿真分析。Yucel Orkut Aktas等[20]设计了一台翼身融合式固定翼垂直起降飞行器原理样机,并进行了结构仿真及飞行测试[21-22]。
6 无人机自力起飞技术对比分析及技术展望
无人机自力起飞技术对比如表1所示。

表1 无人机自力起飞技术对比
就现存的无人机自力起飞方式而言,火箭助推发射及滑跑起飞技术已经较为成熟,世界各国的关注焦点转向了无人机的垂直发射领域。而在这其中,升力换向式飞行器可以作为未来的主要发展趋势,这是由于它继承了固定翼飞行器和旋翼飞行器的优点,既具有良好的巡航能力,也可在空中长时间悬停。在相同条件下应用领域更加广泛[23]。
在开发新式自力起飞方式的基础上,还应对已有的起飞方式进行专有技术上的优化研究。目前,应用于火箭助推发射的多级助推火箭时序脉冲点火控制技术,针对垂直起降飞行器的发动机推力矢量控制技术和电驱动升力换向技术等都得到了较好的发展。另外,为实现多架无人机的同时发射,还需应用采取“逻辑与”控制通道设计和冷/热启动控制的无人机高可靠性集群发射控制等技术。近年来,许多智能技术被整合到了无人机发射领域中,如在无人机起飞过程中加入基于大数据平台的故障检测及判断环节,或是将传统的旋翼无人机PID控制技术替换为以人工神经网络、遗传算法、粒子群算法等智能算法为基础的新型控制策略,这大大提高了无人机起飞过程中的稳定性和执行作战任务时的可靠性。
总之,无人机起飞技术必定会向着成本低、集成度高、机动性好、使用寿命长、具有可执行多种复杂作战任务能力的方向发展。
7 结论
无人机的自力起飞技术涉及到多个学科及研究领域,是一项复杂的综合性技术。在未来战争中无人机要求机动性好、生存能力强、成本低,因而对其发射也提出了高可靠性、高集成度等要求。本文介绍了目前主流的无人机自力起飞方式、国内外研究现状、发展趋势,以供参考。
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24
青少年科技博览(中学版)(2020年12期)2020-03-29
科学Fans(2019年4期)2019-04-30
航空模型(2016年10期)2017-05-09
航空模型(2016年10期)2017-05-09
中国科技纵横(2017年2期)2017-03-24
中学课程辅导·教师教育(中)(2017年2期)2017-03-24
民间故事选刊·上(2017年2期)2017-02-23
小小说月刊·下半月(2017年1期)2017-02-06