
电磁驱动配气机构的发动机分缸工作一致性控制
2019-11-19 08:29徐亚旋常思勤胡茂杨
中国机械工程 2019年21期
徐亚旋 刘 梁 常思勤 胡茂杨
南京理工大学机械工程学院,南京,210094
0 引言
在多缸发动机中,由于进气歧管结构和表面粗糙度不同等原因,各气缸进气量分布不均,因此每个气缸间不可避免地存在空燃比差异[1]。缸间空燃比分布不均会增加发动机排放和燃油消耗,同时恶化驾驶性能[2-3]。
为了降低缸间空燃比差异,研究者们提出了各种分缸空燃比一致性控制方法。各缸排气口处空燃比的准确测量或精确估算是空燃比控制策略中的关键问题。目前对分缸空燃比的估计研究主要是基于进气歧管和排气歧管的时域建模,通过建立状态观测器的方法来估计分缸空燃比,如建立滑模观测器[4]、卡尔曼滤波器[5]、周期时变观测器[6]、有源自回归输入模型[7]等。由于汽油机一般采用节气门控制进气量,无法独立调节各缸的进气量,所以现有文献中控制分缸空燃比的方式通常是通过补偿各缸喷油量来降低空燃比差异的[8-11]。补偿喷油量的方式可以实现各缸空燃比一致,但无法消除各缸进气量差异,因此无法保证各缸输出转矩的一致。
电磁驱动配气机构(electromagnetic valve train,EMVT)为实现分缸工作一致性提供了一种新的技术途径。在发动机循环供油量一定时,通过独立调节各缸进气门开启持续期来控制各缸内空燃比达到理论空燃比。该方法由于减小了缸间进气量的差异,因此能够实现发动机各缸空燃比和输出转矩同时一致。
本文基于EMVT提出一种四缸汽油机分缸空燃比一致性控制方法。首先在GT-Power中建立发动机一维模型;然后建立各缸废气混合过程的时域模型,提出一种基于差分进化(differential evolution,DE)算法的参数辨识方法,并基于辨识的参数设计了衰减记忆卡尔曼滤波状态观测器;最后以理论空燃比为目标,利用反馈控制器对各缸进气门的关闭角进行了调节。通过GT-Power与Simulink联合仿真验证提出的分缸空燃比控制方法的有效性。
1 EMVT发动机系统模型
自行研制的动圈式EMVT是一种全柔性化的无凸轮配气机构,能够实现对气门升程、开启关闭正时的调节,进而实现无节气门负荷控制[12-14],如图1所示,目前在发动机气缸盖上完成了电磁气门的测试试验[15-17]。不同气门升程和开启持续期测试曲线如图2所示。气门最大升程为8mm,气门开启/关闭过渡时间(5%~95%行程所占时间)最快可达2.9 ms[15]。本文主要利用各缸进气门关闭正时的调节实现各缸进气量的独立控制。

图1 EMVT样机缸盖测试平台Fig.1 Test bench of engine cylinder head with EMVT
EMVT发动机是在1.8 L的四缸汽油机基础上改装而成的,原型机特性如表1所示。根据试验数据,在GT-Power中建立发动机一维仿真模型。不同转速满负荷下,发动机转矩及有效燃油消耗的仿真结果与原型机试验数据对比如图3a所示。在不同的转速下,从低负荷到满负荷,对每个工况点下的仿真值与试验值都进行了对比分析,本文主要以转速1 200 r/min工况为例研究分缸空燃比控制。图3b为转速为1 200 r/min下的仿真结果与试验数据对比。由图3可以看出,仿真结果可以与试验数据较好地吻合,误差在5%以内。
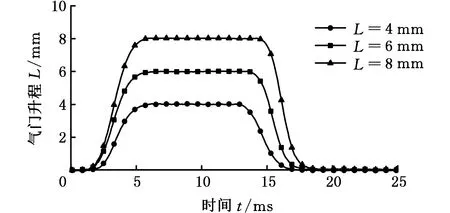
(a)不同升程测试曲线
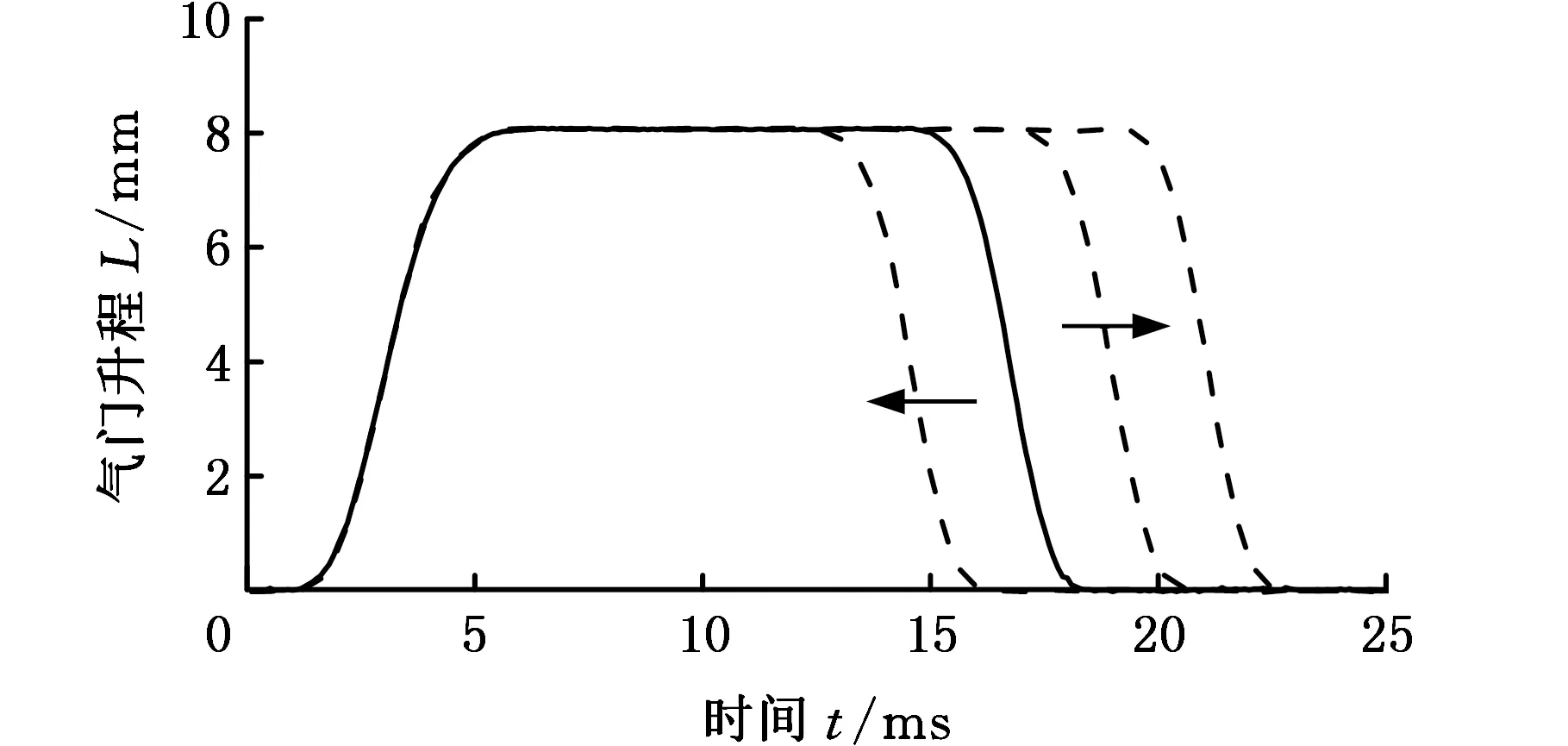
(b)不同开启持续期测试曲线图2 EMVT试验气门测试曲线Fig.2 Test curves of valve based on EMVT
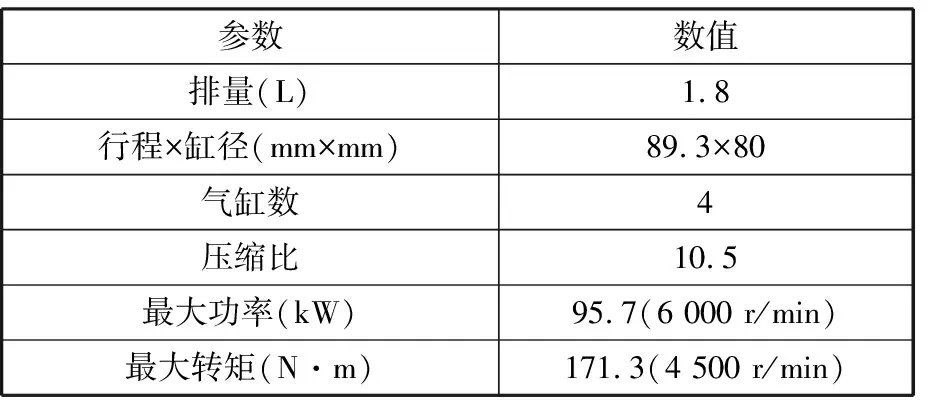
参数数值排量(L)1.8 行程×缸径(mm×mm)89.3×80气缸数4压缩比10.5最大功率(kW)95.7(6 000 r/min)最大转矩(N·m)171.3(4 500 r/min)
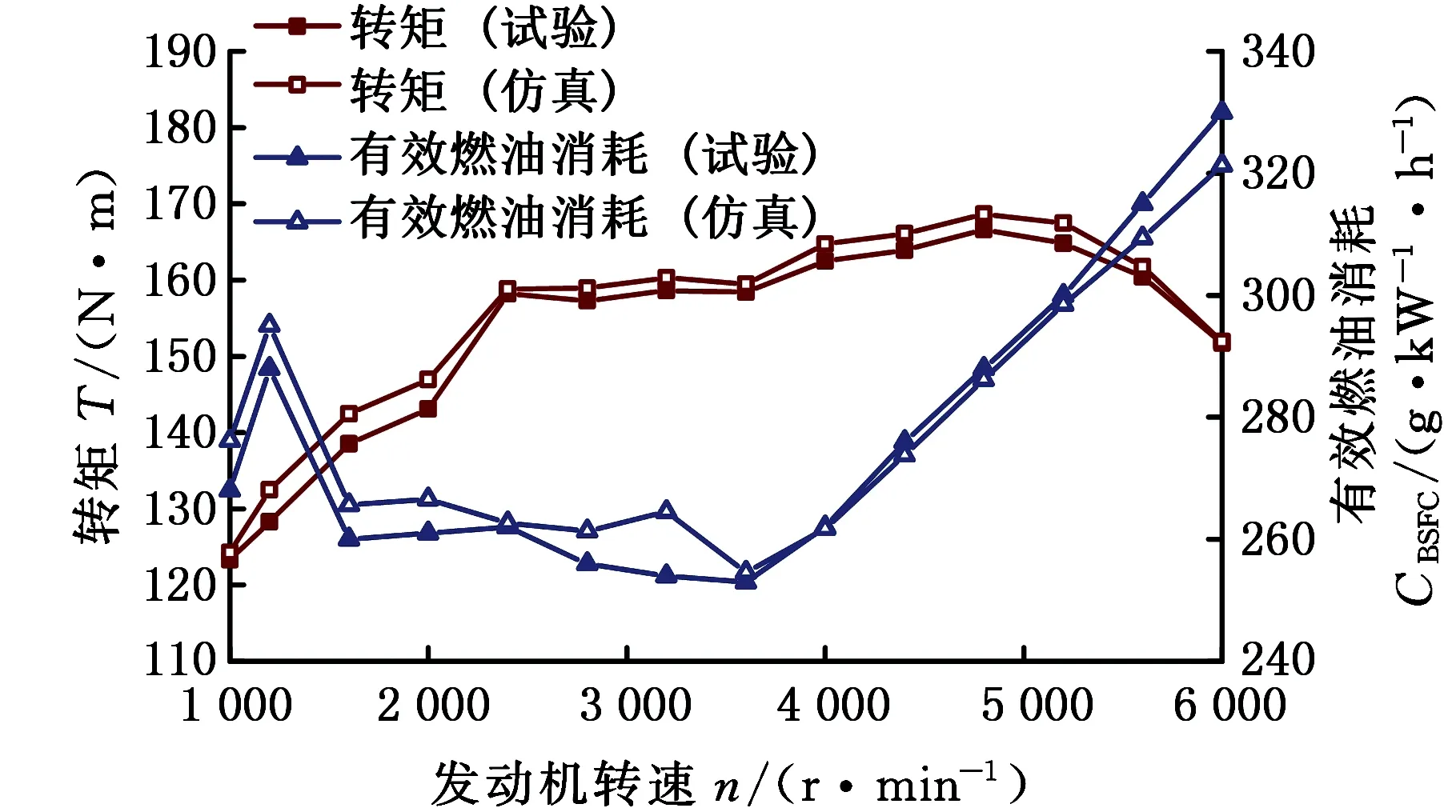
(a)不同转速满负荷下
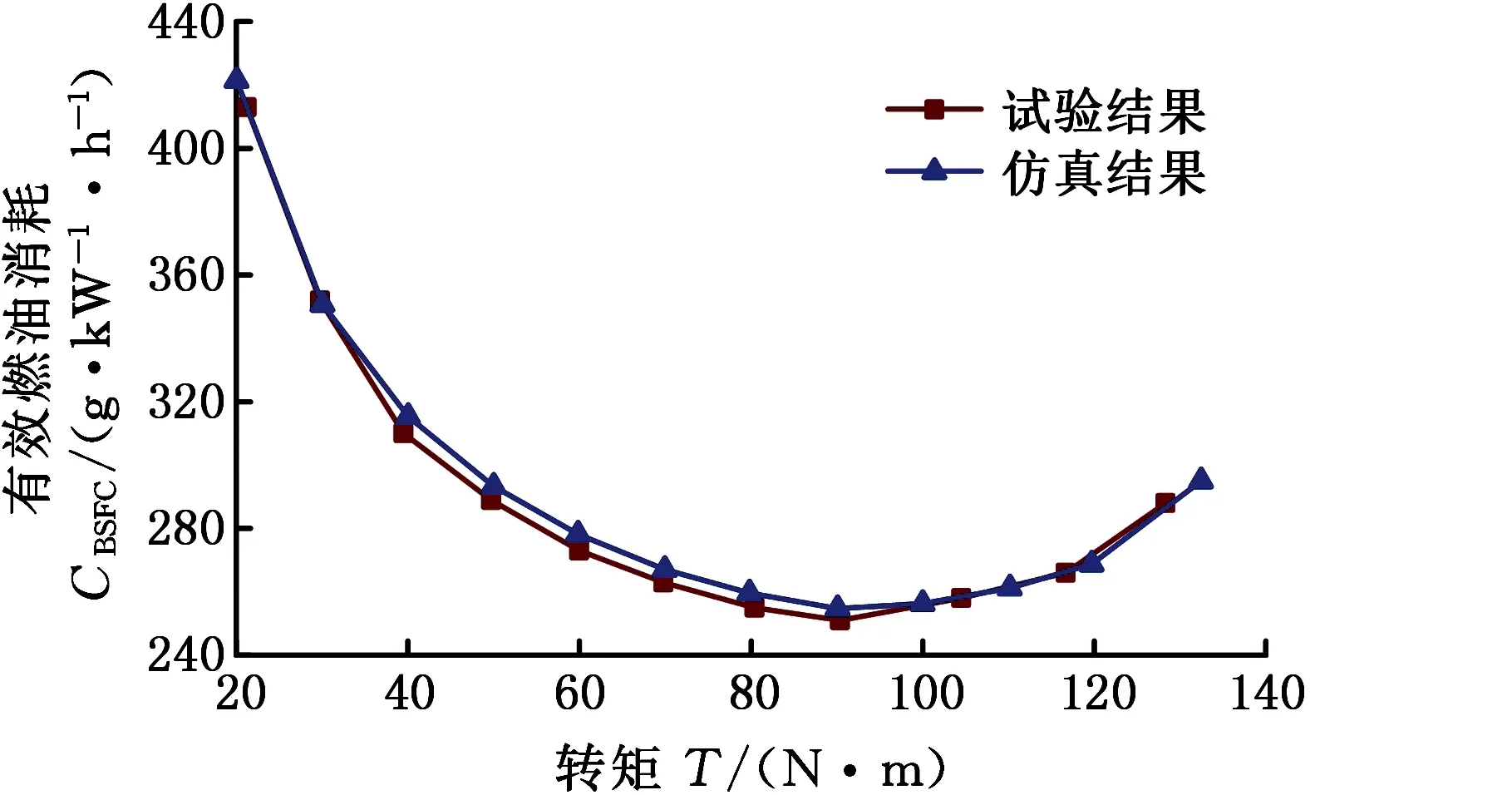
(b)1 200 r/min转速下图3 原型机的仿真结果和试验结果对比Fig.3 Comparison of simulated results and test result s for prototype engine
为研究EMVT发动机分缸工作的一致性,需在原型机模型基础上建立EMVT发动机模型。GT-Power中提供了ValveSolSignalConn模块,该模块通过逻辑信号0和1之间切换,实现气门的开启或关闭。
2 发动机废气混合过程的数学模型
2.1 废气混合时域模型
本文采用MILLO等[18]提出的时域建模方法对废气混合过程进行建模。某时刻流经发动机排气歧管汇合处的废气空燃比可以表示为各缸废气空燃比的加权平均值。稳态工况时考虑一个循环内废气混合过程,在各缸膨胀冲程的下止点进行空燃比采样,采样时刻间隔为180°CA(曲柄转角),则在采样时刻k的四缸发动机混合废气空燃比可以表示为
(1)
C=[c1c2c3c4]
其中,αAFR-mix(k)为采样时刻k时排气歧管汇合处的混合废气空燃比;αAFR-cyl(k)为采样时刻k时正在排气的缸的空燃比;权重系数c1~c4根据点火顺序(1-3-4-2)选取,即k时刻正在排气的缸权重系数最大,在k时刻前排气缸的权重系数依次递减。对于本文的对称排气歧管,每次采样对应的比例系数矩阵C基本相同。
样机仅在排气歧管汇合处安装了一个宽域氧(universal exhaust-gas oxygen,UEGO)传感器。本文将基于UEGO传感器实现对各缸空燃比的估计与控制。由于传感器的动态效应,采集到的信号相对于真实空燃比会发生衰减及相移等变形。采用带延迟的一阶惯性环节来描述UEGO传感器的动态特性[19],则排气歧管汇合处实际传感器测量空燃比αAFR-sen可由下式得到:
(2)
式中,Tsen为响应延迟;τsen为时间常数。
2.2 缸间空燃比差异模型
在EMVT试验中,通过改变控制气门开启和关闭的信号即可实现气门正时及气门开启持续期的柔性调节[20],图4为EMVT试验中的气门控制信号与气门升程曲线。控制信号在tso时刻由0变为1,该时刻气门开始开启;控制信号在tsc时刻由1变为0,此时气门开始关闭,经过关闭过渡时间3 ms气门完全关闭。控制信号在tso~tsc范围内为1,将tso~tsc时间段称为开启信号持续期。因此当过渡时间一定时,气门升程曲线主要由气门开启时刻和气门开始关闭时刻决定。
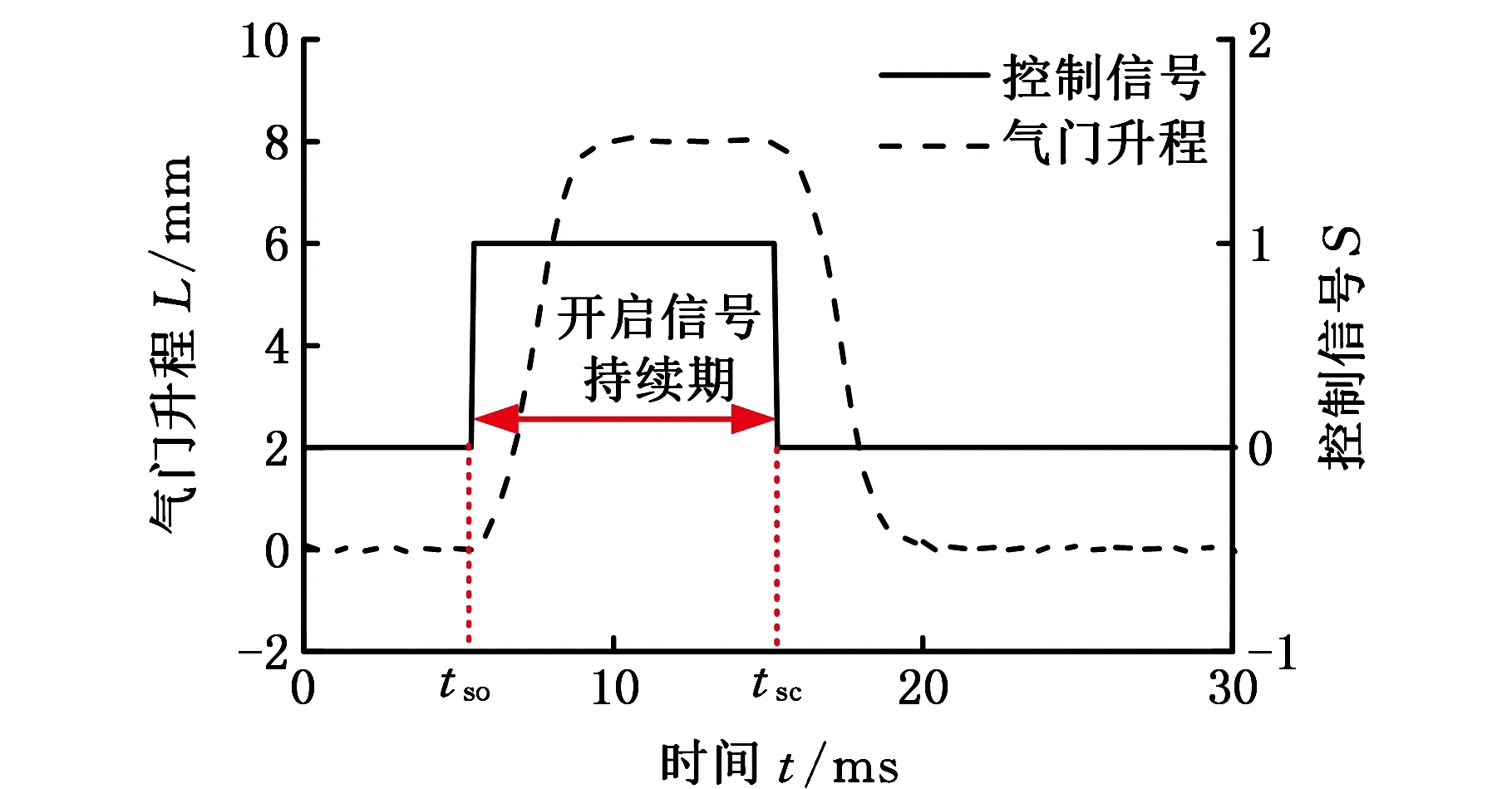
图4 EMVT试验气门控制信号与升程曲线Fig.4 Control signal and test curve of valv e based on EMVT
本文利用在排气歧管汇合点处安装的UEGO传感器信号进行参数辨识与控制。在单个传感器辨识参数的情况下,能获取的数据量只有各缸的进气门开始关闭时刻与UEGO传感器的采样输出空燃比,因此需要分析进气门开始关闭时刻与混合废气空燃比的关系并建立缸间空燃比差异模型。
将发动机进气流量在进气冲程内积分,可以得到发动机每缸每循环进气量
(3)

理想状态下,平均每缸每循环进气量可由下式表示:
(4)
式中,n为发动机转速;ncyl为气缸数。
以n=1 200 r/min为例,设置气门开启/关闭过渡时间为3 ms,不同进气门开启信号持续期下所对应的进气流量如图5a所示。通过最小二乘法对曲线进行三次多项式函数的拟合,所得拟合方程如下:

(5)

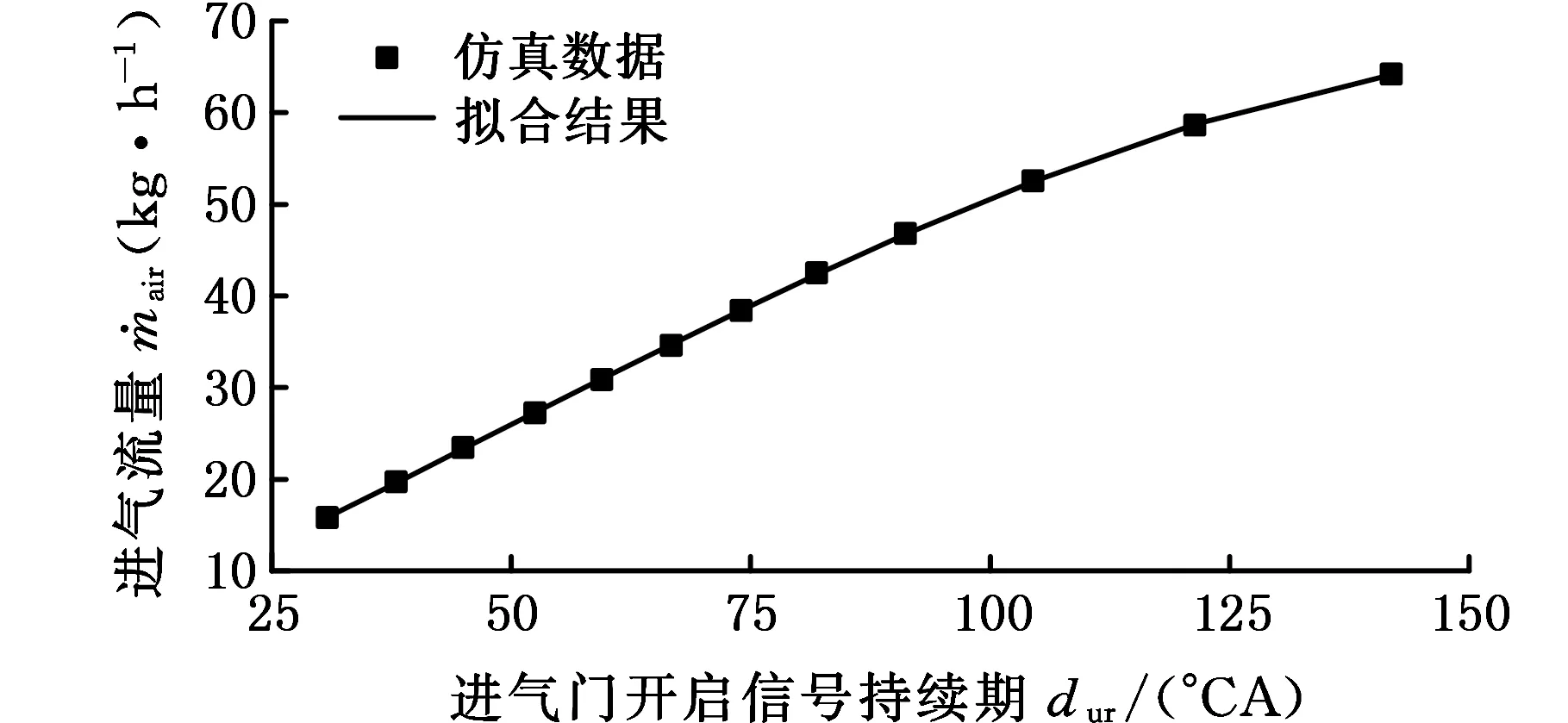
(a)曲线拟合结果
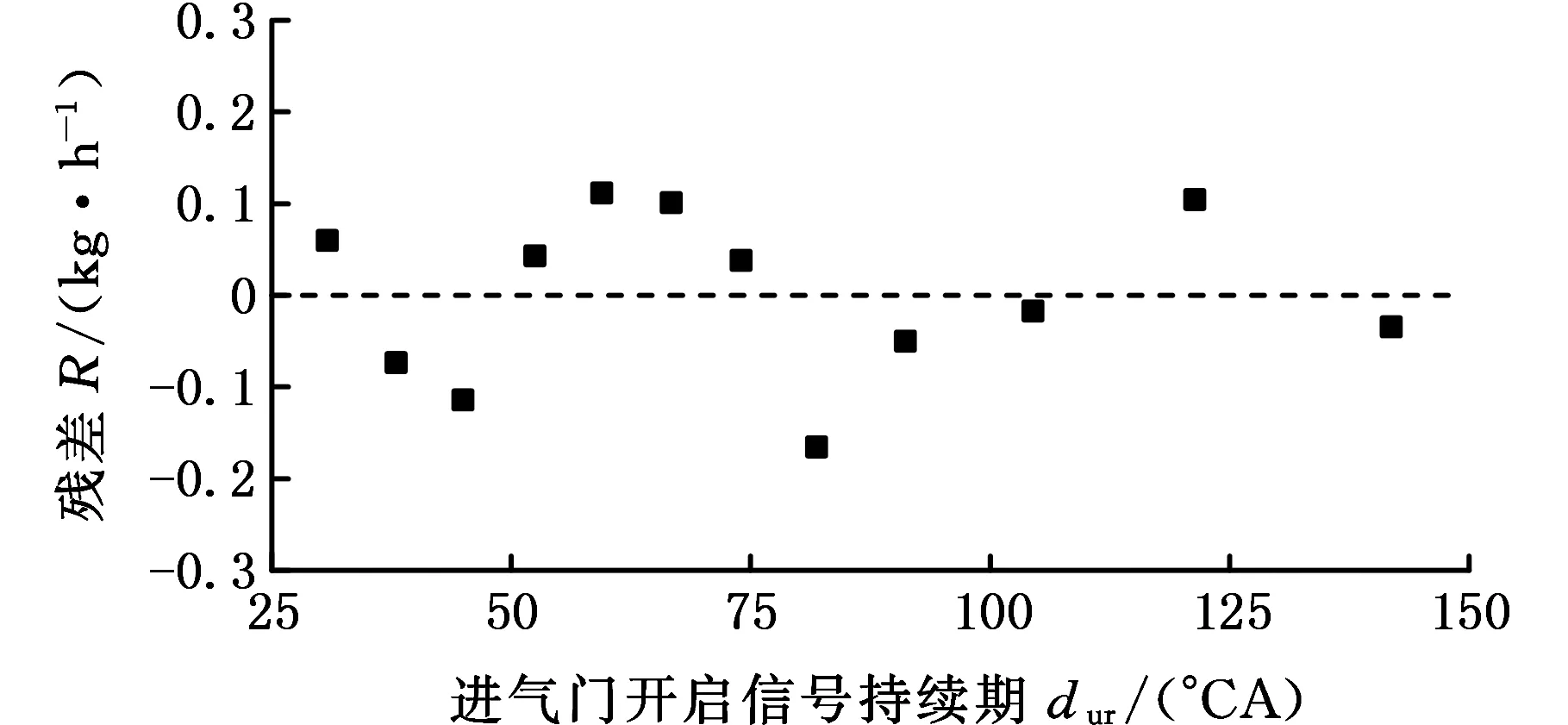
(b)残差图图5 不同开启信号持续期下进气流量曲线拟合及残差图Fig.5 The result of intake flow curve fitting an d residual plot under different opening signal durations
通过残差图(图5b)可以看出残差大致服从均值为零的白噪声分布。
由于进气歧管长度及结构等差异的存在,实际发动机中各缸循环进气量存在差异。为了准确描述各缸循环进气量的差异,引入气缸的进气误差系数Ki。令Ki表示第i缸实际循环进气量mac,i和平均每缸循环进气量mac的差值与平均每缸循环进气量mac的比值,即
Ki=(mac,i-mac)/maci=1,2,3,4
(6)
由此可得各缸实际循环进气量
mac,i=(1+Ki)maci=1,2,3,4
(7)
(8)
假设各缸喷油情况一致,则各缸喷油量可统一表示为
mf=Gfstf
(9)
式中,mf为各缸喷油量;Gfs为喷油器流率;tf为喷油脉宽。
对于气道喷射汽油机中存在的油膜湿壁现象,在稳态工况下,油膜沉积和蒸发可以达到平衡,每循环喷油量等于进入气缸中的燃油量,因此在发动机的稳态控制中可以不考虑油膜效应。则发动机i缸真实空燃比αAFR-cyl,i为
αAFR-cyl,i=mac,i/mfi=1,2,3,4
(10)
3 基于DE算法的参数辨识
由废气混合时域模型知,计算各缸空燃比前须求出比例系数矩阵C。对于排气歧管对称的四缸机而言,废气混合过程模型中未知参数为K1~K4、c1~c4、τsen和Tsen。为了减少待辨识参数数量,提高比例系数的辨识精度,参数τsen和Tsen可以单独试验辨识,于是将待辨识参数缩减为8个。
在Simulink中指定各缸的进气门开始关闭时刻作为输入,GT-Power中发动机模型运行稳定后采集排气歧管汇合处UEGO传感器的混合废气空燃比信号作为输出。辨识参数时发动机运行工况为转速1 200 r/min,负荷60 N·m,采集30组不同的稳定输入和输出作为辨识数据进行参数辨识。
应用DE算法辨识上述未知参数。DE算法是一种模拟生物进化的随机模型,具有较强的全局收敛能力和鲁棒性[21]。DE算法可以对非线性不可微连续空间的函数进行最小化,它采用实数编码方式,DE算法中的群体一般表示成N个D维向量。在各参数可行域范围内均匀随机生成N个D维实值向量构成其初始群体{Xi,0|i=1,2,…,N},其中实值向量Xi,G=(Xi,G(1),Xi,G(2),…,Xi,G(D))表示第G代种群中的一个个体,每一个个体就是一组待辨识的8个参数。D指目标问题的决策变量个数,也可以称为目标问题的维数,本文中D=8,N为种群大小。将个体中待辨识的这组参数与辨识数据中各缸进气门开始关闭时刻tsc一起代入式(1)~式(10)中,即可得到对应的传感器输出空燃比计算值αAFR-cal。算法的目标是将个体每组输入下计算的结果αAFR-cal与实际传感器测量值αAFR-sen间的误差减到最小,可设计目标函数f1如下:
(11)
此外,由各缸的进气误差系数Ki的定义可知∑Ki=0,因此将∑Ki与0的偏离距离作为目标函数f2。使用加权法建立如下多目标适应度评价函数:
f=f1(X)+af2(X)
(12)
式中,a为f2的权系数。
DE算法包括变异、交叉和选择三种基本操作。给定当前群体{Xi,G|i=1,2,…,N},对其中的任意个体Xi采用DE算法的DE/rand/1变异策略,按照下式生成一个对应的变异个体:
Vi,G=Xr1,G+F(Xr2,G-Xr3,G)
(13)
其中,Xr1、Xr2和Xr3为从当前群体中随机选择的3个互不相同的个体,且与目标个体Xi不同;缩放因子F是一个大于0的实常数,用来控制差分向量的缩放比例。
在完成变异操作后,DE算法将在目标个体Xi和变异个体Vi之间执行一种离散交叉操作,从而生成一个测试个体Ui,该离散交叉可描述如下:
(14)
其中,j= 1, 2,…,D;jrand为[1,D]中的一个随机整数,以确保不会出现测试个体Ui完全复制Xi的情况;Rj(0,1)表示给每一个j产生一个在(0,1)的均匀随机数;Pcr为介于0~1之间的交叉概率,一般可设置为0.9。
对于每一个测试个体,DE算法采用一种基于贪婪的选择机制,从测试向量Ui,G和目标向量Xi,G中选择一个更优值成为进入下一代的个体:
(15)
完成上述选择操作后,DE算法得到一个新的群体{Xi,G+1|i=1,2,…,N}进入下一代,从而继续执行进化搜索过程。
目前文献中常用的搜索方法是最小二乘辨识方法,通过采集各缸废气空燃比与混合废气空燃比的稳态输出作为辨识数据来直接计算矩阵C。为了检验DE算法辨识参数的准确性,将DE算法得到的辨识结果与最小二乘法得到的结果作对比。本文中DE算法的种群规模设为1 000,最大迭代次数为5 000,两种方法的辨识结果对比如表2所示,可以看出,两种辨识方法的结果基本一致。

表2 参数辨识结果
4 各缸空燃比估计与控制
卡尔曼滤波器是一种无偏的线性最小方差估计算法,本文采用基于卡尔曼滤波的状态观测器来估计各缸空燃比。应用卡尔曼滤波器时需定义系统状态变量。对于废气混合时域模型,选取采样时刻前各缸测量的空燃比作为系统状态变量Xk:
(16)
排气歧管汇合处的混合废气空燃比测量值作为系统观测量Yk:
Yk=[αAFR-sen(k)]
(17)
则状态空间模型如下:
(18)
式中,A为状态转移矩阵;W、V分别为系统噪声和观测噪声,都是零均值白噪声。
卡尔曼滤波的计算过程分为预估与校正两个过程。预估过程是建立时间更新方程,并利用前一时刻状态计算当前状态的先验估计。校正过程是利用状态更新方程,根据测量值对先验估计进行校正从而得出状态的后验估计。下式为离散卡尔曼滤波的基本方程[22]:
(19)
式中,Pk为估计误差方阵;Kk为卡尔曼增益矩阵;I为单位矩阵;Q、R分别为系统噪声和观测噪声的方差阵。
卡尔曼滤波估计中,由于描述系统的数学模型及噪声模型可能不准确,这会使得滤波误差较大,甚至产生发散。采用衰减记忆自适应滤波,通过自适应调节估计误差方阵P来改变卡尔曼增益矩阵K,提高新观测数据在滤波结果中的地位,能够有效克服滤波发散现象[23]。
若采用衰减记忆卡尔曼滤波,则式(19)中的第二式改为
(20)
其中,sk为衰减因子。sk可由下式得到:
(21)
在实际工程运用中,为了加强观测数据的权重,衰减因子的取值方法如下:
(22)
由此完成基于衰减记忆卡尔曼滤波的分缸空燃比观测器的建立。
控制系统的目标是把各缸空燃比控制到理论值14.7。本文采用联合仿真实现了发动机各缸空燃比的控制,整体控制方案见图6。由发动机一维软件GT-Power计算并得到发动机状态参数,包括气缸压力、转矩、空燃比等。各缸空燃比控制通过MATLAB/Simulink中的控制模型实现。控制模型采集GT-Power传输的计算结果,如发动机转速、排气总管空燃比、进气流量以及曲轴瞬时转矩等数据。基于这些数据,通过分缸空燃比观测器估计出各缸空燃比。最后通过PI控制器对每个缸的进气门开始关闭时刻进行调整。
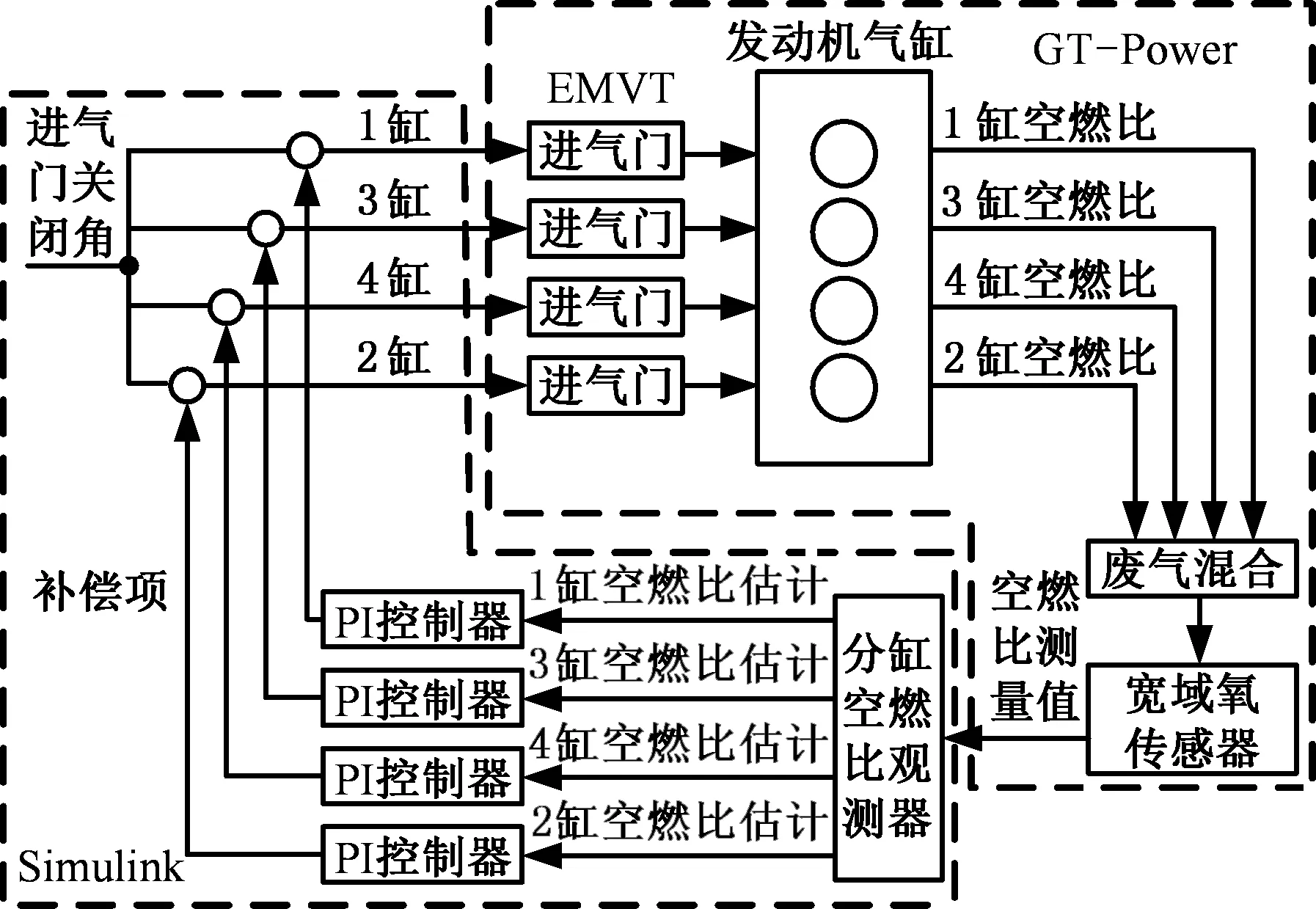
图6 分缸空燃比控制的系统框图Fig.6 System structure of individual air-fue l ratio control
每个缸使用一个带前馈数值表的比例积分(PI)控制器。各缸空燃比估计值分别被发送到4个PI控制器中,将空燃比设定值与各缸空燃比估计值的偏差作为控制器输入,并独立对每个缸的进气门开始关闭时刻进行调整,保证系统输出空燃比为14.7。为了避免控制过程中发动机可能产生的油膜动态,采用降低控制频率的方式,让油膜动态有足够的时间趋于平衡,本文采用4个循环作为模型的反馈控制周期。
5 结果与分析
5.1 各缸空燃比控制
为了验证提出的控制方法的有效性,通过GT-Power与Simulink对发动机分缸空燃比控制器进行联合仿真。反馈控制仿真中,发动机模型运行工况和辨识参数时的工况相同,发动机转速为1 200 r/min,负载转矩为60 N·m。
仿真中曲轴转角0°在压缩冲程上止点位置。图7所示为空燃比反馈控制过程中各缸进气门开始关闭时刻变化情况,可以看出,在6 s时刻启动分缸平衡反馈控制后,各缸的进气门开始关闭时刻分别由控制器独立控制。图8所示为反馈控制过程中各缸空燃比。将4个气缸中最大空燃比和最小空燃比之差与平均混合废气空燃比的比值定义为各气缸空燃比间的差异,当发动机模型运行稳定后,初始阶段各气缸的空燃比之间的差异约为2.6%。随着各缸进气门开始关闭时刻的独立控制,各缸空燃比逐渐向理论空燃比靠拢。仿真进行到10 s以后,各缸空燃比间的差异已经减小到了0.05%以内。图9所示为反馈控制过程中排气歧管汇合处测得的混合废气空燃比。由图9可见,分缸空燃比反馈控制前由于各缸空燃比间差异较大,混合废气空燃比信号波动较大。随着缸间空燃比差异的减小,混合废气空燃比信号波动幅值逐渐衰减,平均混合废气空燃比逐渐趋近于理论空燃比值。由控制结果也可以看出,基于衰减记忆卡尔曼滤波建立的分缸空燃比观测器能够提供有效的估计结果。
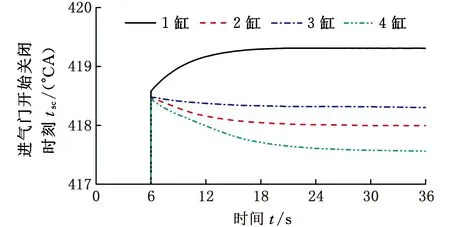
图7 反馈控制中各缸进气门开始关闭时刻Fig.7 The intake valve start closing timing for eac h cylinder in feedback controlling
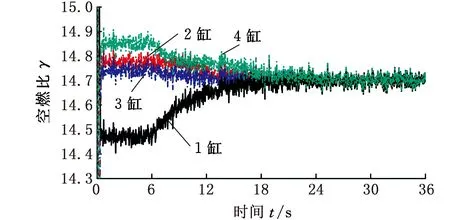
图8 各缸空燃比的反馈控制结果Fig.8 Feedback control results of individual cylinde r air-fuel ratio
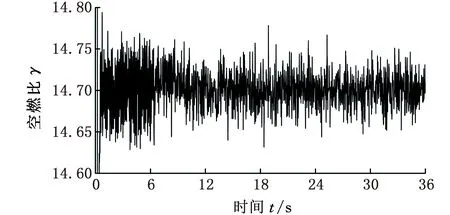
图9 排气歧管汇合处混合废气空燃比的反馈控制结果Fig.9 Feedback control results of air-fuel ratio at th e confluence point of the exhaust manifold
5.2 瞬时转矩控制
基于EMVT的分缸空燃比一致性控制,不仅能够实现空燃比一致,同时各缸进气门独立调节减小了各缸进气量差异,从而有利于降低各缸瞬时转矩差异。
在介绍分缸空燃比控制对各缸瞬时转矩影响前,先对转矩平衡的指标进行说明。图10所示为一个循环内作用在曲轴上的瞬时驱动转矩Tc。
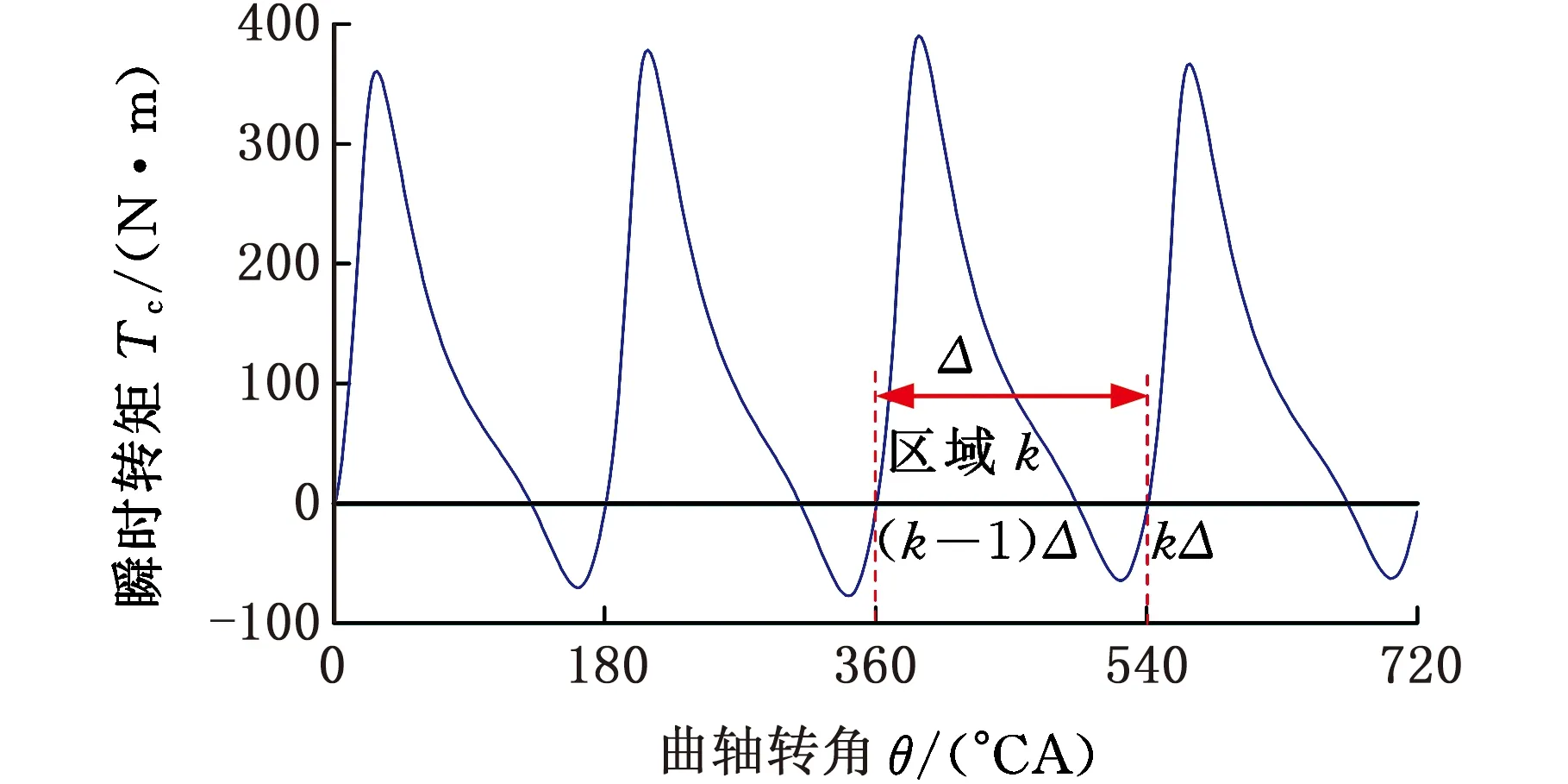
图10 瞬时转矩曲线Fig.10 Instantaneous torque profile
以1缸上止点为零点,将四缸机的每个燃烧循环在曲轴角度域内等分为4个部分,并依次表示为Δ1~Δ4,间隔Δ=π,将Tc在每个间隔内的平均转矩作为衡量发动机转矩平衡的指标,用T(k)表示[(k-1)Δ,kΔ]区域内的平均转矩:
(23)
各缸转矩的相对标准偏差yrsd由下式计算:
(24)
式中,T0为稳态工况下曲轴输出的平均转矩。
一个循环内T(k)的最大值与最小值之差与平均转矩T0的比值定义为各缸转矩间的差异。各缸转矩差异越小时,yrsd值越趋向于零。
图11所示为转矩平衡的评价指标T(k)和yrsd的仿真结果,可以看出,在6 s时刻之后,T(k)间的差异逐渐从最初的4.51%减少到0.25%,并且逐渐趋于稳态工况下的平均转矩,各缸转矩的相对标准偏差yrsd值从1.25%逐渐趋向于0,并最终稳定在0.07%以内。仿真结果表明,基于EMVT的分缸空燃比一致性控制减小了各缸间的转矩差异。
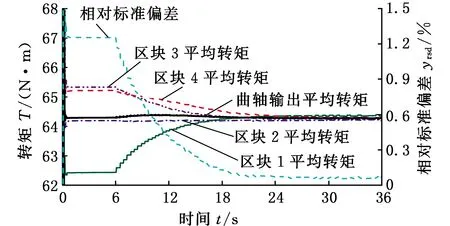
图11 反馈控制中的转矩平衡指标Fig.11 Torque balance index in feedback controlling
6 结论
(1)建立了四缸发动机废气混合过程模型,并分析了由各缸进气差异导致缸间空燃比差异的过程。提出了一种利用差分进化算法进行模型中未知参数辨识的方法,通过单个宽域氧传感器完成了参数辨识。
(2)基于衰减记忆卡尔曼滤波建立了分缸空燃比观测器,该观测器能够利用混合废气空燃比估计出各缸空燃比值。通过独立控制各缸进气门开始关闭时刻来调节各缸空燃比,仿真结果表明,缸间空燃比差异由2.6%减小至0.05%。
(3)通过电磁驱动配气机构独立调节各缸进气量,为解决缸间工作不一致问题提供了新的途径。在各缸喷油量一致的情况下,分缸空燃比控制后,各缸输出转矩的差异由4.51%降低至0.25%。证明该控制方法较好地提高了发动机工作的一致性。
(4)通过独立控制各缸进气门开启持续期来调整各缸循环进气量,降低了因进气歧管结构、表面粗糙度等因素造成的各缸循环进气量差异。
猜你喜欢
北京航空航天大学学报(2020年3期)2021-01-14
新传奇(2020年40期)2020-10-23
意林·全彩Color(2019年8期)2019-11-13
汽车与新动力(2019年5期)2019-11-07
小天使·五年级语数英综合(2019年6期)2019-06-27
领导文萃(2017年10期)2017-06-05
汽车文摘(2015年8期)2015-12-15
汽车文摘(2015年7期)2015-12-14
农机使用与维修(2014年6期)2014-09-23
汽车与新动力(2014年4期)2014-02-27
