让行行人条件下交叉口机动车运行特性研究
2020-01-16 09:55杨晓芳周磊磊上海理工大学管理学院上海200093
物流科技 2019年12期
杨晓芳,周磊磊 (上海理工大学 管理学院,上海 200093)
0 引 言
交叉口是城市道路的重要节点,其运行状态与运行效率严重影响城市道路网的效率。机动车、非机动车与行人间存在的相互干扰和交通冲突严重地影响了交叉口的运行效率与交通安全。让行规则的实施方便了行人通过交叉口。因此,在让行条件下,交叉口的通行能力怎么改变,现有的控制方法是否适用亟待研究。交叉口人车冲突问题早在20世纪就受到了国内外学者的广泛关注,目前国内外已有不少学者对交叉口人车冲突问题进行了研究。在对交叉口的冲突分析方面,胡宏宇[1]利用视频图像处理技术提取了交叉口人车冲突基本数据,确定了人车冲突安全等级;刘洋[2]通过视频拍摄获取数据,并将机非冲突划分为4种类型;Stipancic[3]统计了7个交叉口的视频数据并分析了机非冲突的严重程度。以上研究在分析交叉口冲突时考虑的因素较为单一,而且针对行人与非机动车运动特征的分析相对较少。在建立人车冲突模型方面,韩印等[4]基于行人过街消散特性建立了人车相互冲突模型;鲍怡婷等[5]人研究了右转行人与车辆的冲突模型,分析了人车冲突机理;陆斯文等[6]分析了单车道行人激进过街与机动车之间的碰撞过程,建立了冲突和碰撞事故概率模型;刘博通[7]提出过街行人与驾驶员的碰撞风险概率模型。以上模型较少考虑到过街行人受到的外界影响因素,且对过街行人的运动规则研究不足。在交叉口人车冲突让行机理研究方面,元胞自动机模型因为其演化规则简单,易于实现且能有效模拟人车微观运动的状态得到了广泛的运用[8-10]。其中,Chai等[11]发现利用元胞自动机建立的该模型能够更加有效地评价交叉口车辆运行冲突;孙泽等[12]构建出可以刻画行人和机动车的相互干扰行为的元胞自动机模型。
上述交叉口人车冲突让行机理方面的研究,从以往单一的行人或机动车的角度向综合考虑人车交互行为对让行机理研究的影响角度转变,但是针对机动车礼让行人这一行为考虑的较少。然而随着交通法规的逐步完善、执法力度的逐步加强,礼让行人的规定逐步得到了落实,让行条件下的交叉口通行能力及控制方法都亟待研究。因此,本文将在礼让行人条件的基础上,建立描述人车交互行为的交通模型,研究交叉口机动车的让行机理。
1 交叉口人车冲突分析
本文对城市信号交叉口的不同相位、不同车道组内机动车、行人二者间的相互影响进行了调查分析。统计结果显示,城市信号交叉口普遍存在3种类型的人车冲突。交叉口行人与机动车的冲突如图1所示。
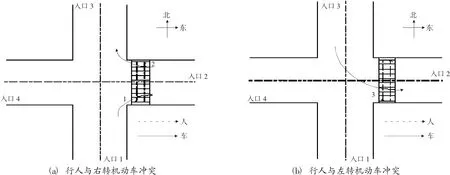
图1 交叉口行人与机动车的冲突
为了使所调查的数据更加符合让行行人条件,在实际的调查过程中尽量选取有交警指挥的交叉口。最终选取了上海市长阳路与隆昌路交叉口作为本次的调查地点,并且记录了该交叉口10天早高峰时段的人车冲突数据,上海市长阳路与隆昌路交叉口早高峰时段人车冲突调查如表1所示。

表1 上海市长阳路与隆昌路交叉口早高峰时段人车冲突调查
由表1,通过分析调查数据发现,冲突区1有31.2%的让行车辆选择停车让行,冲突区2有87.5%的让行车辆选择停车让行,冲突区3有10.7%的让行车辆选择停车让行。综上所述,交叉口行人与机动车发生冲突时,机动车一般采用减速让行与停车让行的混合方式让行行人。

表2 行人通过交叉口后的运动方向人数统计
由表2,当行人与右转车辆冲突,行人在通过人行横道时,由于受到人行横道周围存在的公交站点、商场等交通吸引点的影响,有80个人向北方向运动,94个人向东南方向运动,向南与东北方向运动的行人相对较少,行人在人行横道上的分布趋势呈两条相互平行的反向行人流;当行人与左转车辆冲突时,行人在通过人行横道时,有71个人向东南方向运动,向南、北与东北三个方向运动的人数大致相同,且与东南方向的人数差相对较大,向东南方向运动的行人形成一条较为明显的单向行人流。综上所述,人行横道周围存在交通吸引点时,过街行人的运动方向因受到交通吸引点的影响会具有偏向交通吸引点的趋势。
2 让行行人条件下的元胞自动机模型
2.1 建模思路
模拟信号交叉口人车交互运行的仿真平台很多,如VISSIM,Synchro和元胞自动机等。与VISSIM,Synchro相比,元胞自动机能够更加精细地模拟人车行为[13]。让行行人条件下的元胞自动机模型是建立在元胞自动机的理论基础上,结合行人流模型与机动车流模型,研究交叉口让行行人条件下车辆让行机理的一种模型。
2.2 模型建立
2.2.1 行人过街规则
传统Blue双向行人流模型下的行人运动规则只包含了换道、向前运动及交换位置,并没有考虑到行人运动轨迹还会受到交通吸引点的影响。通过上述的调查研究发现,人行横道周围存在公交站点、商场等交通吸引点时,行人在人行横道上的行走方向更加偏向于交通吸引点。据此,本文假定此时行人的位置为(i,j),i表示元胞所在行,j表示元胞所在列,行人的速度(m/s) 记为最大速度 (m/s)记为则从t(s)到t+1(s)时间步,行人的运动规则如下。
(1) 换 道
①存在交通吸引点:行人受到人行横道周围交通吸引点的影响后,会产生换道行为。如图2所示,假设交通吸引点位于人行横道对面的左侧位置。当(i,j)位置的行人前方有行人阻碍且左右两侧临近的元胞为空时,行人会以较大的概率pl向左换道,换道位置更新为xi=xi-1。反之以较小的概率1-pl向右换道,换道位置更新为xi=xi+1;当(i,j)位置的行人前方与右侧临近的元胞被占据时,行人同样选择向左换道,换道位置更新同理;当(i,j)位置的行人前方与左侧临近的元胞被占据时,即使左前方存在交通吸引点,行人仍然选择向右换道,换道位置更新同理。

图2 行人换道
②不存在交通吸引点:行人在不受到人行横道周围交通吸引点的影响时,当行人临近的元胞为空,行人考虑换道,计算并选择条件较好的路径,此时行人的换道位置更新为:

式中:xi为人行横道横坐标元胞数为第(i-1,j)位置前方的空元胞数为第(i,j)位置前方的空元胞数为第(i+1,j)位置前方的空元胞数。如果两个平行的行人期望占据同一个元胞,那么这两个人占据的机会相等。
(2) 向前运动
(3) 行人冲突
行人与对向行人发生冲突时,通过与对向行人交换位置完成更新,此时行人的位移减少一个元胞长度,行人的位置更新为
式中:xPn(t+1)为t+1(s)行人的元胞位置,(t)为t(s)行人的元胞位置,(t+1)为t+1(s)行人的速度 (m/s)。
2.2.2 机动车运行规则
(1)无行人干扰下的机动车运行规则
在机动车模型中,以1×n的离散格子表示一条道路,由于是1×n的格子,所以个体元胞只有前后两侧的元胞作为邻居,作为一辆汽车则不能与前后车发生追尾。此外每个元胞或者是空的,或者被一辆车占据,当元胞被一辆车占据时,车的速度(km/h) 可以取
①右转机动车运行规则
当车辆n即将到达交叉口,此时车辆的速度(km/h)为(t),由于右转弯半径相对较小,车辆必须减小速度以保证行车安全,车辆的刹车灯亮起,bn(t)=1,减速后的车辆速度(km/h) 为(t+1),车辆的位置更新为受到前车n的影响,后车n+1从t(s)到t+1(s)时间步的运行规则如下。
a.确定车辆n+1的随机慢化概率p,在保证前后车辆的时间车头距th小于安全时间间距ts的前提下,p=p

式中:bn是车辆n的刹车灯状态,bn=1(0)表示刹车灯的亮(灭);th=dn/vn(t)是车辆的时间车头距(s/veh);ts=min表示安全时间间距(s);h表示刹车灯的影响范围(m)表示前车n的期望速度表示前车n在t+1(s)的速度 (km/h);vCn+1(t+1 )表示后车n+1在t+1(s)的速度 (km/h)(t)表示后车n+1在t(s)的位置(t+1)表示后车n+1在t+1(s)的位置。
当车辆n和n+1进入交叉口后,车辆的速度都得到了一定程度的降低,如果没有特殊情况发生,车辆均保持着相对较低的速度匀速行驶。
当车辆n即将通过交叉口时,刹车灯关闭,车辆处于加速状态,加速后的车辆n速度为位置更新为受到前车n的影响,后车n+1从t(s)到t+1(s)时间步的运行规则如下。

②左转机动车运行规则
当左转相位的绿灯亮起时,左转车辆n启动并进入交叉口,此时车辆处于加速状态。实际调查表明,右转车辆的加速较为平缓,加速后的车辆速度相对较低。车辆n加速后的速度为受到前车n的影响,后车n+1从t(s)到t+1(s)时间步的运行规则如下。

当左转车辆通过交叉口后会再次加速,此时车辆的速度与位置更新规则和上述情况的更新原理相同,这里不再赘述。
(2)有行人干扰下的机动车运行规则
有行人干扰下的机动车运行规则总体上可以划分为减速让行和停车让行。
①减速让行
当车辆n选择以减速让行的方式让行行人,行人供车辆穿插的间隙gap(m)大于临界值gap1(m)时便进入冲突区。从t(s)到t+1(s)时间步,车辆n的运行状态更新如下:

车辆通过冲突区后,开始缓慢加速。从t(s)到t+1(s)时间步,车辆n的运行状态更新如下:

②停车让行
当车辆n选择以停车让行的方式让行行人,驾驶人在发现人行横道上的行人时距离冲突区为d1个元胞。如果冲突区内有行人或下一刻行人会进入冲突区,车辆减速停靠在接近人行横道的位置。t(s)到t+1(s)时间步,车辆n的运行状态更新如下:

如果车辆n在减速后依旧找不到存在大于临界值gap1(m)的穿插间隙,此时车辆距离行人为d2个元胞,车辆进行二次减速并停车。从t(s)到t+1(s)时间步,车辆n的运行状态更新如下:

在某一时刻,行人供车辆穿插的间隙gap(m)大于临界值gap1(m)时,车辆启动。从t(s)到t+1(s)时间步,车辆n的运行状态更新同公式(3)。
3 仿真结果分析
按照上文建立的人车让行元胞自动机规则,编译元胞自动机源代码并仿真分析人车让行条件下的仿真结果。如图3所示。
由图3,在不受行人与非机动车干扰的情况下,右转车辆速度变化较左转车辆速度变化更加明显。这是由于右转弯半径相对较小,车辆必须减小速度以保证行车安全,而左转弯半径一般较大,车辆不需要减速以适应转弯运动的需要,所以左转车辆运行速度比较稳定,没有出现较大的波动。转向车辆在通过冲突区的过程中,其平均速度呈先减小后增大的趋势。在其他影响变量不变的情况下,随着受交通吸引点影响的过街行人比例增加,转向车辆在通过冲突区的过程中,速度逐渐降低。对比图3(b)、(c)、(d),在受交通吸引点影响的行人增加相同比例的情况下,冲突区2的车辆速度变化较大,冲突区1的车辆速度变化次之,冲突区3的车辆速度变化较小。
综合分析所有仿真结果,并结合冲突区车辆停车让行比例与减速让行比例可知,在受交通吸引点影响的过街行人比例相同情况下,停车让行较减速让行对冲突区车辆速度变化趋势的影响更大。
4 结束语
(1)通过对城市交叉口的实际调查,总结了交叉口主要存在的人车冲突方式。在对行人过街的路径分析基础上,提出了过街行人会受到人行横道周围存在的交通吸引点的影响这一观点。
(2)通过对让行行人条件下的元胞自动机模型的仿真结果分析发现,受到交通吸引点影响的过街行人比例相同的情况下,停车让行较减速让行对冲突区车辆速度变化趋势的影响更大。
(3)本文主要研究了十字交叉口的人车让行机理,针对其它类型交叉口的人车让行研究还比较欠缺,在以后的研究中需要加以考虑。

图3 受影响行人比例与车辆速度关系
猜你喜欢
新传奇(2021年32期)2021-09-22
海峡姐妹(2020年8期)2020-08-25
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中国人民公安大学学报(自然科学版)(2018年2期)2018-01-14
北京测绘(2016年2期)2016-01-24
小天使·四年级语数英综合(2015年4期)2015-04-20
中国航海(2014年1期)2014-05-09