基于STM32的脊柱手术钻孔辅助装置控制系统*
2020-07-23 01:36李翔昱徐邦杰
机电工程 2020年7期
李翔昱,汤 卿,徐邦杰,姚 进
(四川大学 机械工程学院,四川 成都 610065)
0 引 言
椎弓根钉内固定术作为脊柱手术中稳定性重建的重要手段,其基本原理是将骨钉经由椎弓根植入椎体中,并利用骨钉及支撑杆对脊柱进行固定和支撑。由于脊椎周围遍布重要的神经、血管及脏器,植入骨钉前的钉道准备过程具有高风险。钉道的方向稍有偏差或穿出椎体都可能造成造成病人相应的功能失调乃至永久的残疾[1-2]。
医生术前能够根据医学成像准确地确定钻孔的位置和深度。术中,脊柱手术主要依靠医师手持电钻进行钻孔。医生在钻孔时首先要依据影像目测钻孔的位置和方向,然后手持电钻定位后一边钻孔一边观察钻孔的情况。在这个过程中很难保证正确的电钻钻孔位置和方向,同时长时间的手术操作所带来的疲劳也增加了误操作的可能性[3-4]。
目前,脊柱骨折最好的治疗手段是进行椎弓根内固定术,椎弓根钉是否能够准确植入是脊柱手术成功与否的关键。文献报道:术后CT查实,传统脊柱手术椎弓根穿破率高达21%~31%,对脊椎、神经根、大血管等造成严重威胁[5-7]。
针对这一问题,本文将研发一款脊柱手术钻孔辅助装置,就控制系统提出设计方案,并完成相应实验平台的试制和初步实验[8-11]。
1 装置整体设计
1.1 装置整体功能
在脊柱钻孔手术时,为了达到钻臂运动比较灵活的目的,钻臂末端应满足在三维空间具有6个自由度。考虑到钻孔手术的危险性,笔者给出了更加符合人机工程学的设计指标,即整个装置满足重力自平衡、钻臂运动时的阻尼可调节,钻臂可以锁紧,锁紧时具有足够的刚度等设计指标。另外,电钻在钻孔时要能够自动进给并且进给量可调,同时需要实时显示钻孔过程中的各项参数指标。
目前笔者已完成6自由度、具有重力自平衡功能的钻孔辅助装置机械结构设计,如图1所示。
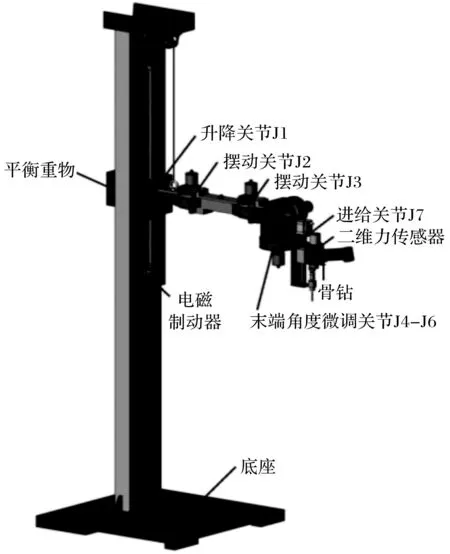
图1 脊柱钻孔辅助装置结构设计
装置整体的重力自平衡通过配重系统实现,钻臂关节J1为移动关节,关节J2-J6为转动关节,末端通过步进电机直线模组构成的进给关节J7和电钻联接。在各转动关节处设计有磁粉离合器,作为实现阻尼控制的核心部件,可以通过控制其制动力矩实现手术钻孔定位时的拖动、微调和锁紧状态的切换,并且保持钻臂具有一定的刚度和稳定性。在各转动关节处还设置有光学编码器,用以检测各关节的转动角度并计算末端电钻的实时位姿。笔者在转动关节J6末端设置有手术电钻,通过步进电机直线模组和转动关节J6末端连接,从而实现直线钻孔进给。
1.2 控制系统总体设计
控制系统需要设计实现电流/电压输出控制功能,编码器信号读取功能,以及步进电机驱动控制功能。据此设计的控制系统总体方案如图2所示。
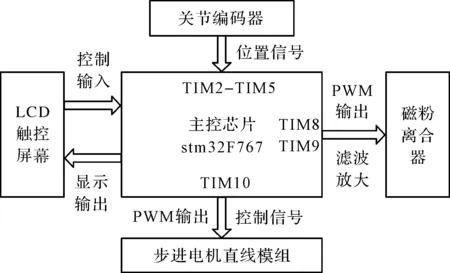
图2 总体控制方案
主控芯片选择STM32F767,阻尼控制方案为通过定时器TIM8和TIM9产生5路PWM信号转换为大小可控的电压输出,经过功率放大后输入到磁粉离合器,实现转动关节的变阻尼控制以及锁紧。直线进给系统方案为通过TIM10产生一路PWM输出给定频率和个数的脉冲,控制步进电机直线模组的进给量,同时利用两个IO口控制步进电机是否使能及正反转。位置信号检测方案为通过采用定时器TIM1-TIM5的编码器接口模式,进行编码器脉冲信号的读取和计数。
钻孔时各项数据的实时显示通过LCD屏幕以及力/力矩传感器实现,钻孔时的各项操作通过LCD触控屏幕的人机交互界面实现。
2 控制系统
2.1 阻尼控制系统设计
根据磁粉离合器的工作原理[12],其具有如下特性:励磁电流与转矩呈线性关系,传递的转矩不受滑差影响的特性。因此,为了达到控制转矩的目的,需要控制输出电流的大小。
由于STM32F767的DAC输出只有两路,本文采用PWM+RC滤波的方式来实现DAC输出。实际电路中典型的PWM波形可以用分段函数表示为:
(1)
式中:T—单片机中计数脉冲的基本周期;n—PWM波一个周期的计数脉冲个数;N—PWM波一个周期中高电平的计数脉冲个数;VH/VL—PWM的高低电平值;k—谐波次数。
将式(1)展开成傅里叶级数,可得:
(2)
式中:n/N(VH-VL)+VL—直流分量;


式(2)中的直流分量与n成线性关系,并随着n从0到N,直流分量在VL到VL+VH之间变化。因此,本文只需设计低通滤波器进行解调,滤除高频分量,就可以得到从PMW波到电压输出DAC的转换。式(2)中的第2项的幅度和相角与n有关,频率为1/(NT),其实就是PWM的输出频率,该频率是设计低通滤波器的依据。如果能把1次谐波很好过滤掉,则可以消除绝大部分的高次谐波。
据此,可以得出PWMDAC的分辨率公式:
p=log2N
(3)
如果假设n的最小变化为1,当N=256的时候,分辨率就是8位。在该假设条件下,设计要求1次谐波对输出电压的影响不要超过1个位的精度,也就是3.3/256=0.012 89 V。假设VH为3.3 V,VL为0 V,那么一次谐波的最大值是2*3.3/π=2.1 V,因此,该二阶RC滤波电路的设计需要提供至少-20lg(2.1/0.012 89)=-44 dB的衰减。
由于本系统的定时器频率为108 MHz,考虑8位分辨率的情况下,PWM频率为108M/256=421.875 kHz。二阶RC滤波的要求截止频率为33.62 kHz,根据下式,可以计算出二阶RC滤波器的所需的电容电阻值:
(4)
据此,可以通过改变PWM占空比的方式调节单片机IO接口的输出电压大小,再通过磁粉将输入电压转换成对应的电流值,用于控制磁粉离合器。具体的电压计算公式为:
Vout=δ(VH-VL)+VL
(5)
式中:δ—PWM的占空比。
2.2 直线进给系统设计
本文拟采用两个5 V开关量控制步进电机,其输出分别用于使能步进电机驱动和控制步进电机正反转,另外还需要一路脉冲发送用于控制步进电机的实际运动量。
本文通过定时器的PWM功能实现对步进电机的控制。具体通过发送对应个数的脉冲控制步进电机的进给量。进给量计算公式如下:
s=Nθγ(mm)
(6)
式中:s—进给量;N—发送脉冲个数;θ—步距角;γ—导程。
具体实现方式为使用PWM输出加定时器中断模式,每发送一个脉冲均触发一次定时器中断;其次在中断服务函数中维护一个全局变量,记录已经发送的脉冲个数,当脉冲数达到设定个数时,关闭定时器中断和PWM输出。
本文设计的LCD屏幕界面如图3所示。
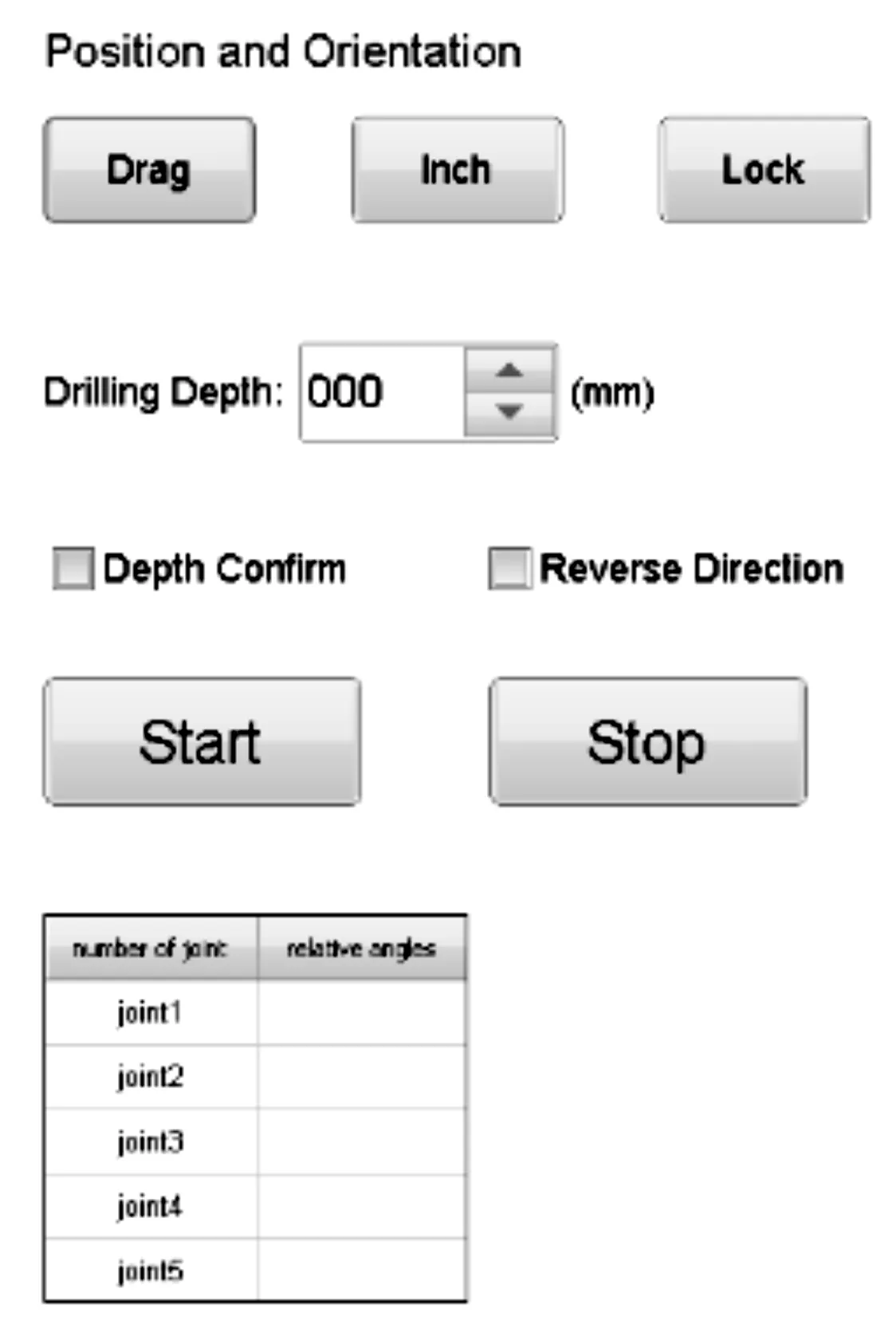
图3 LCD触控屏幕界面
该交互界面中,第一行为阻尼模式切换按钮,包括拖动、微调和锁紧模式,分别对应为Drag、Inch和Lock按钮。第二行的数字调节按钮通过设置步进电机的进给量(mm)来实现钻孔深度的设置。第三行第一个复选框用来确认钻孔的深度,未勾选时第四行的开始按钮无效。第二个复选框用来改变步进电机运动的方向。第四行的两个按钮用来控制末端直线模组的启动和停止,对应于图中的Start和Stop按钮。
2.3 手术操作流程
使用该装置完成脊柱手术钻孔流程,如图4所示。
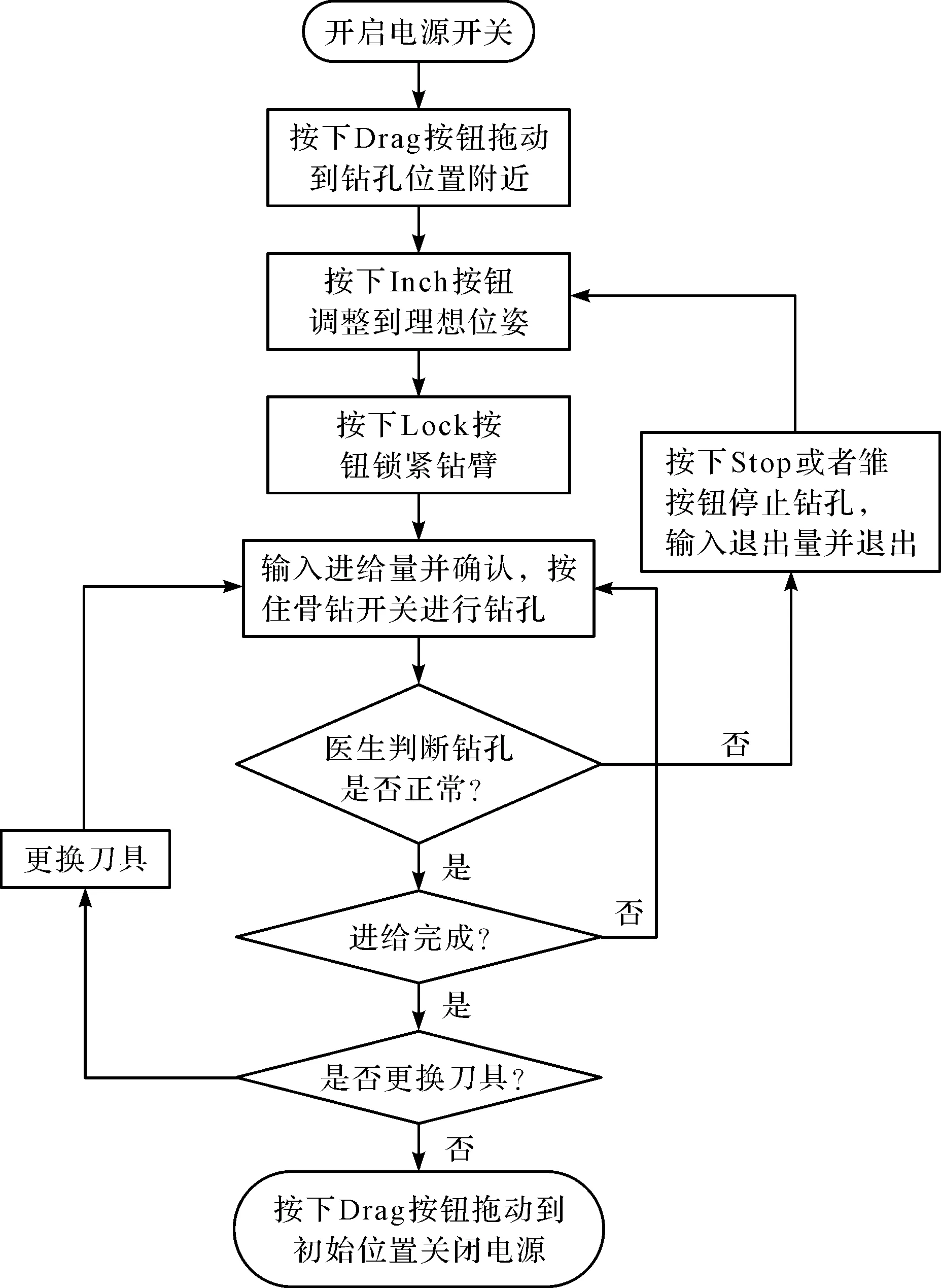
图4 脊柱钻孔辅助装置操作流程图
具体的钻孔操作流程如下所述:
(1)打开电源开关,磁粉离合器初始化为锁紧状态;(2)轻按LCD屏幕上的Drag将辅助钻臂工作模式切换到拖动模式,这时医生可以用较小的牵引力将骨钻拖动到打孔位置;(3)轻按LCD屏幕上的Inch按钮,调整钻孔位置和角度;(4)轻按LCD屏幕上的Lock按钮进入锁紧状态;(5)输入钻孔进给量和进给速度,勾选确认复选框DepthConfirm,然后轻按Start按钮开始自动进给操作;(6)观察显示屏上显示的钻孔数据;(7)一旦出现问题,按下Stop按钮或急停按钮。如需退出骨钻,勾选进给装置的反向运动复选框ReverseDirection,输入退出量;(8)钻孔完成预先设定的进给量后,由医生决定骨钻退出或者继续进给。
3 实验及结果分析
根据20 N左右的拖动力的需求,本文通过DOE的方法分别确定了拖动和微调状态下所需的关节摩擦力矩,并通过3个按钮分别实现。为了确保钻孔时的安全,按下锁紧后锁紧力矩最大。
试验过程包括:启动设备、拖动钻臂、微调钻头位姿、设置钻孔深度等。实验结果表明:在最大工作力矩下可以满足完全锁紧的需求。
最终完成的实验样机的性能参数,如表1所示。
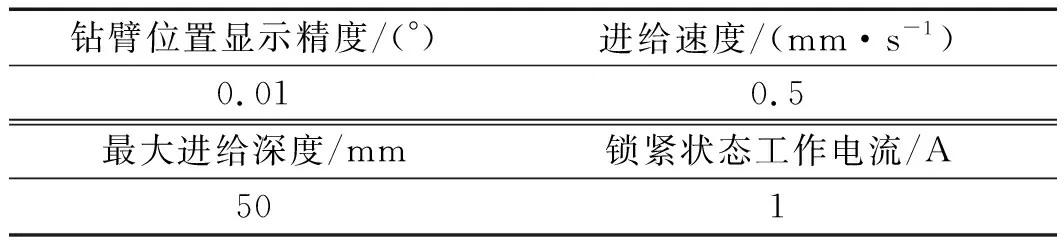
表1 试验样机性能参数
4 结束语
本文根据椎弓根内固定术实施钻孔操作过程中的难点,为已经设计完成的钻孔辅助装置机械系统设计了控制系统,实现了钻臂拖动状态、微调状态和锁紧状态的快速切换控制;实现了钻孔状态的辅助显示,为医生在钻孔时对手术状况的判断提供了帮助。
该系统同时也实现了钻孔自动进给控制,解决了脊柱手术由于钻孔时,可能存在的劳动强度和生理颤振给手术带来的风险问题。
猜你喜欢
中学生天地(A版)(2022年10期)2022-11-23
钣金与制作(2021年11期)2021-11-24
意林(2020年9期)2020-06-01
上海交通大学学报(2019年1期)2019-02-19
制造技术与机床(2018年10期)2018-10-13
科技创新与应用(2018年20期)2018-07-28
少年文艺·我爱写作文(2017年6期)2017-06-12
婚育与健康(2016年6期)2016-05-14
商业评论(2014年9期)2015-02-28
中国科技产业(2015年9期)2015-01-28