
航天器非合作交会一体化控制仿真研究
2020-11-09 03:14刘歌群顾冬晴刘晓坤
科技创新与应用 2020年32期
关键词:仿真
刘歌群 顾冬晴 刘晓坤

摘 要:非合作交会对接对于航天器在轨服务异常重要。文章研究了航天器姿轨一体化的6自由度交会控制仿真技术。文章建立了航天器轨道计算、姿态计算、相对位置计算和控制律计算仿真模型,通过对典型停泊点参数跟踪控制效果的计算,验证了所设计仿真模型的正确性。
关键词:交会对接;一体化控制;仿真
中图分类号:V448 文献标志码:A 文章编号:2095-2945(2020)32-0012-04
Abstract: Non-cooperative rendezvous is very important for on orbit service of spacecrafts. The simulation technology of 6-DOF integrated rendezvous control is studied in this paper. Simulation models for spacecraft orbit calculation, attitude calculation, relative position calculation and control law calculation are established. The correctness of the simulation models is verified by the calculation of tracking control on a typical mooring point.
Keywords: rendezvous; integrated control; simulation
1 概述
空间交会对接对于航天飞行器的在轨组装、维修、维护、物资交换、补给、人员访问等高级空间操作提供了技术前提,是现代航天工业的核心技术之一。当交会对接的一方航天器不能提供有效的合作信息或者不主动配合交会对接任务时,这类航天器就构成了非合作目标,交会对接任务就演变为复杂的非合作交会对接问题。非合作交会对接技术对于故障航天器的在轨捕获与维修、空间垃圾的清除、敌方航天器的捕获等任务至关重要,是航天技术领域又一个制高点。在合作交会对接技术相对成熟的今天,非合作交会对接技术因为其重要性和实现方法的复杂性成为世界各国航天领域的研究热点[1-3]。
空间交会对接是两个航天器在空间轨道上会合并在结构上连成一个整体的操作技术。为成功实现飞行器的交会对接,不仅要让两个飞行器在位置上靠近,还要对飞行器的姿态进行控制、调整,以实现两个飞行器最后的联接。对于飞行器姿态控制所涉及到的运动学和动力学,一般可以将它归结为刚体的姿态控制问题。描述飞行器的姿态的方法有很多,如:欧拉角法、罗觉格斯参数法、四元数法等[1-5]。为了实现航天器轨道和姿态的一体化控制,应在控制器的设计过程中充分考虑轨道和姿态的耦合影响。其实现方法主要有以下两种:第一种首先独立设计姿态控制器和轨道控制器,然后再对姿轨耦合部分进行控制修正;第二种以姿轨耦合动力学模型为基础设计一体化控制算法,这种方法就是所谓的姿轨同步控制方法。姿轨同步控制方式虽然需要建立姿轨耦合动力学模型,但是由于可以直接利用许多现有的控制器设计方法,因此已经成为目前较为常用的方法[6-8]。对于非合作交会姿轨耦合一体化控制研究来说,建模仿真是其中必不可少的基础环节,对于模型分析、算法验证、控制性能计算、动态过程模拟具有重要的意义。为此本文基于四元数描述的非合作交会数学模型,建立一套仿真软件,探索非合作交会的仿真建模技术。
2 航天器轨道运动计算
设椭圆轨道六根数分别为:半长轴a,偏心率e,真近点角?兹,轨道倾角i,近地點幅角?棕,升交点赤经?赘。
2.1 航天器在地心惯性坐标系中的位置矢量r
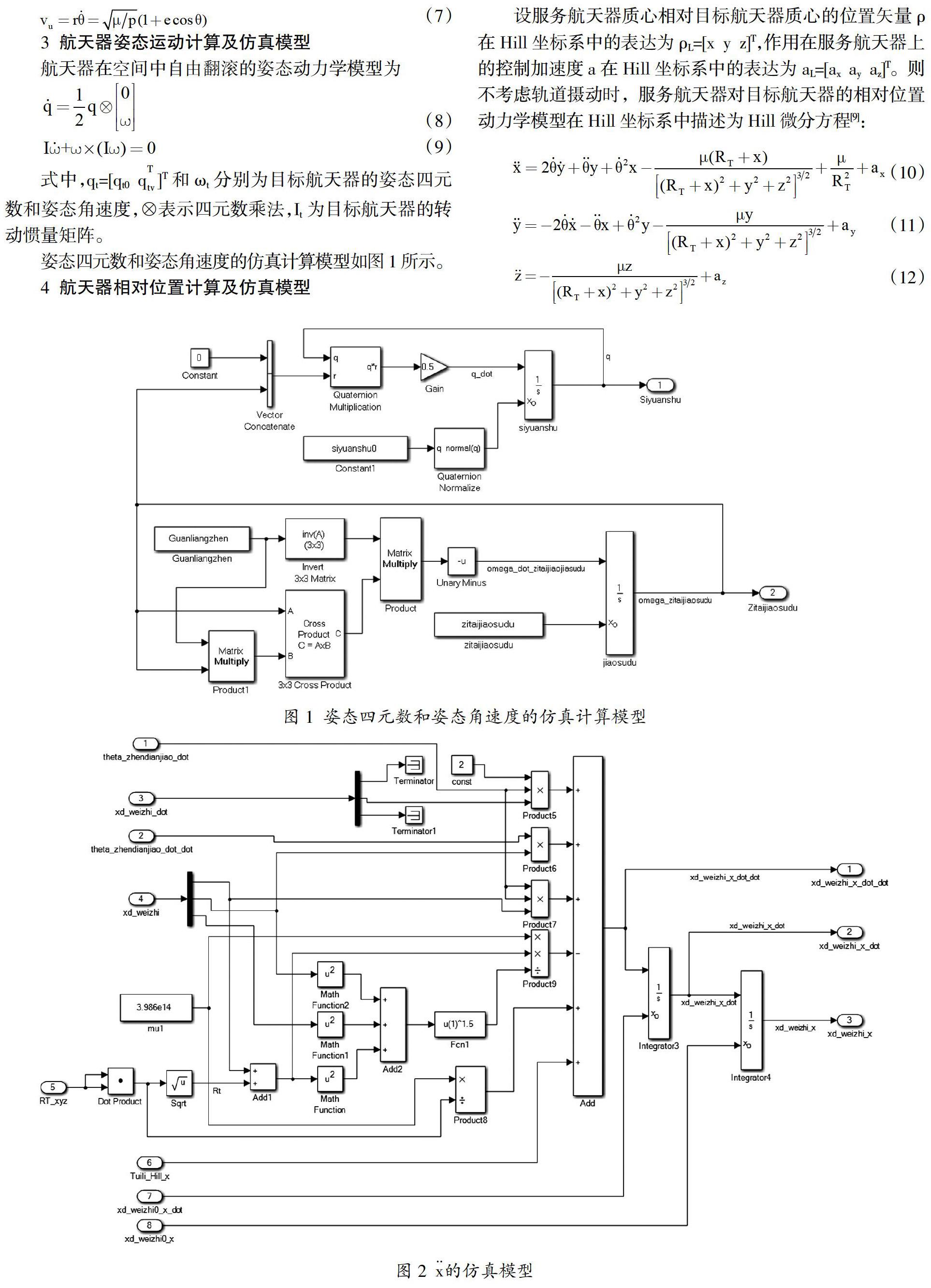
姿态四元数和姿态角速度的仿真计算模型如图1所示。
4 航天器相对位置计算及仿真模型
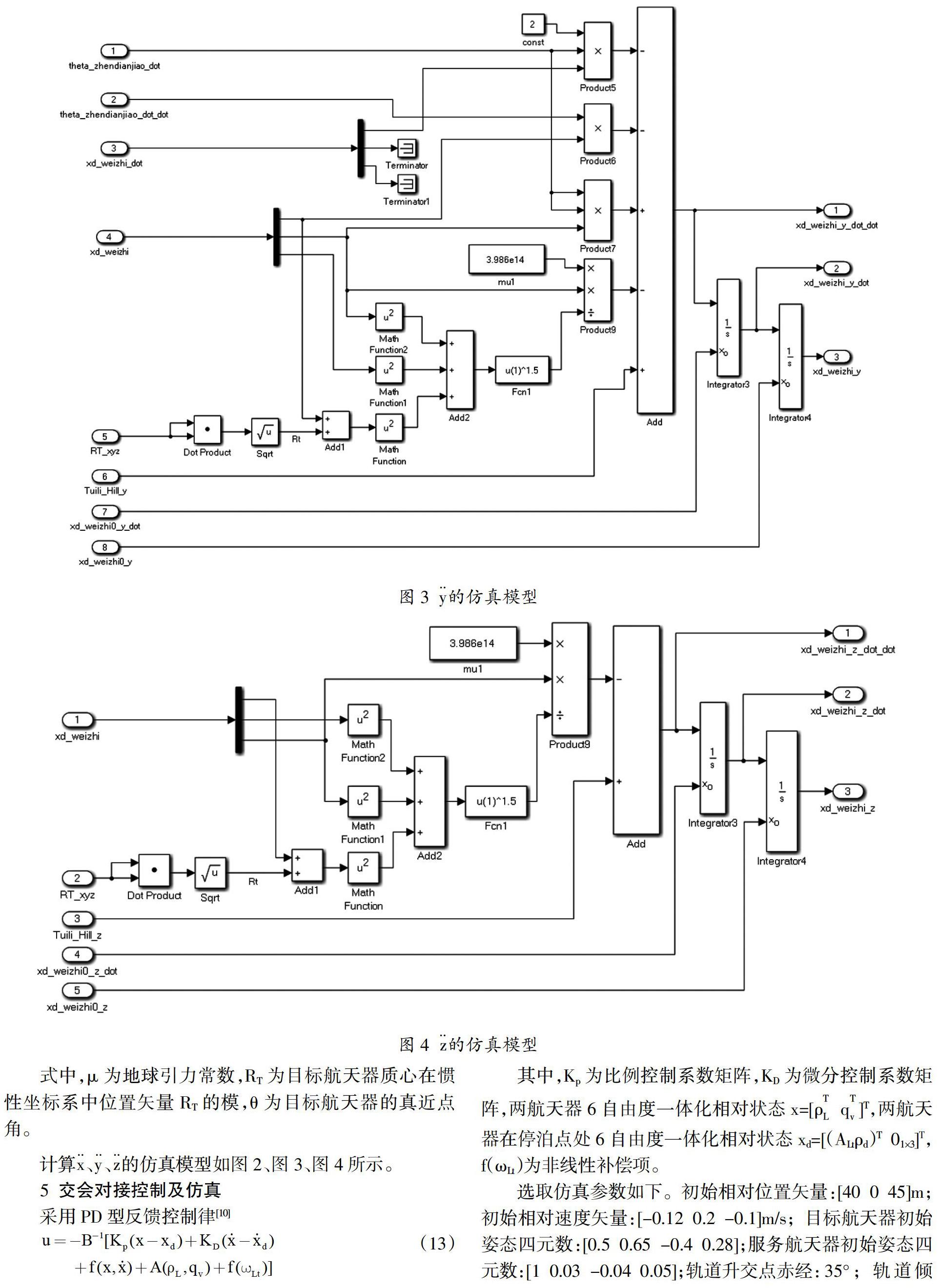
设服务航天器质心相对目标航天器质心的位置矢量?籽 在Hill坐标系中的表达为?籽L=[x y z]T,作用在服务航天器上的控制加速度a在Hill坐标系中的表达为aL=[ax ay az]T。则不考虑轨道摄动时,服务航天器对目标航天器的相对位置动力学模型在Hill坐标系中描述为Hill微分方程[9]:
选取仿真参数如下。初始相对位置矢量:[40 0 45]m;初始相对速度矢量:[-0.12 0.2 -0.1]m/s;目标航天器初始姿态四元数:[0.5 0.65 -0.4 0.28];服务航天器初始姿态四元数:[1 0.03 -0.04 0.05];轨道升交点赤经: 35°;轨道倾角:40°;轨道近地点幅角:12°;轨道真近点角:0°;轨道偏心率:0.005;轨道半长轴:7500km;比例控制系数矩阵:diag(0.45,0.45,0.45,0.24,0.24,0.24);微分控制系数矩阵:diag(1.3,1.3,1.3,0.7,0.7,0.7)。
由所选参数可知,目标航天器处于自由翻滚状态,是一个非合作目标,设定目标停泊点为[10,0,0]m,服务航天器在跟随目标航天器翻滚的同时要停泊在目标航天器主惯量轴后方10m处。运行仿真200秒,得到仿真曲线如图5。
从图(a)与图(b)可见,服务航天器实现了停泊点上相对目标航天器的位置控制。因为目标航天器在自由翻滚,这种翻滚的点运动在Hill坐标系中的位置矢量和速度矢量均呈现正弦规律,所以图(a)与图(b)的曲线都是正弦曲线。图(c)与图(d)显示,两航天器相对姿态四元数和相对姿态角速度在15秒之后趋于0,说明服务航天器很好的实现了对目标航天器的姿态跟踪。图(e)及图(f)说明,在两航天器初始位置初始姿态相差较大的时候,服务航天器需要较大的推力和控制力矩进行机动,以实现对目标航天器的位置和姿态跟踪。当一体化控制使服务航天器到达停泊点并实现姿态保持后,服务航天器仅需要较小的推力和控制力矩即可实现停泊点上的位置与姿态保持。以上结果说明,仿真模型的设计是正确的。
6 总结
本文针对在轨服务环境下的航天器非合作交会对接问题,研究了姿轨耦合一体化控制的仿真技术,利用Simulink设计了两航天器相对运动及PD型反馈控制仿真模型。模型包括航天器轨道计算、姿态计算、相对位置计算和控制律实现等几个方面,文章给出了各个计算模型的具体构成,并利用一组具有代表性的仿真参数,计算了目标航天器具有自由翻滚非合作运动时的最后逼近段停泊点处的跟踪控制效果。仿真计算结果验证了所设计模型的正确性。本文所设计模型对于航天器非合作交会的仿真建模技术具有参考意义。
参考文献:
[1]吴宏鑫,胡军,解永春.航天器智能自主控制研究的回顾与展望[J].空间控制技术与应用,2016,42(1):1-6.
[2]马一科.椭圆轨道飞行器交会对接若干控制问题的研究[D].中国科学技术大学,2014.
[3]高翔宇.航天器轨道交会鲁棒和最优控制设计[D].哈尔滨工业大学,2014.
[4]F Zhang, G R Duan. Integrated translational and rotational finite-time maneuver of a rigid spacecraft with actuator misalignment[J].Iet Control Theory & Applications, 2012,6(9):1192-1204.
[5]P Singla, K Subbarao, J L Junkins. Adaptive Output Feedback Control for Spacecraft Rendezvous and Docking Under Measurement Uncertainty[J].Journal of Guidance Control & Dynamics,2012,29(4):892-902.
[6]王剑颖.航天器姿軌一体化动力学建模、控制与导航方法研究[D].哈尔滨工业大学,2013.
[7]朱战霞,马家瑨,樊瑞山.基于螺旋理论描述的空间相对运动姿轨同步控制[J].航空学报,2016,37(09):2788-2798.
[8]王磊,袁建平,罗建军.接近非合作目标的部分状态反馈姿轨联合控制[J].计算机仿真,2013,30(9):41-45+73.
[9]Bando Mai, Ichikawa Akira. Graphical Generation of Periodic Orbits of Tschauner-Hempel Equations[J].Journal of Guidance, Control, and Dynamics,2012,35(3):1002-1007.
[10]卢伟,耿云海,陈雪芹,等.在轨服务航天器对目标的相对位置和姿态耦合控制[J].航空学报,2011,32(5):857-865.
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
价值工程(2016年29期)2016-11-14
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
企业导报(2016年6期)2016-04-21
