
面向半失能老人的无动力外骨骼分析及设计
2020-12-23 02:16李刚宋振东邹风山孙乾城李加平
机械工程师 2020年12期
李刚, 宋振东, 邹风山, 孙乾城, 李加平
(1.沈阳新松机器人自动化股份有限公司 中央研究院,沈阳110169;2.深圳职业技术学院 机电工程学院,广东 深圳518055)
0 引 言
目前在研的绝大多数外骨骼采用电能、液压等进行驱动,质量较大、售价较高、续航能力较差[1-3],严重地影响了外骨骼的商业化推广[4-7]。
无动力下肢外骨骼是外骨骼领域近几年的研究热点。无动力下肢外骨骼是一种基于被动行走原理[8-9]的可穿戴外骨骼设备。其在运行过程中无需消耗电能等外部能源,可完全依靠特有的结构设计,利用自身力学特性驱动活动部件实现下肢助力。被动行走的步态轨迹与人类行走的步态轨迹十分接近[10-11],将被动行走运力与外骨骼技术结合,可最大程度地实现人-机相容,更可有效地减少行走过程中的能源消耗,从而实现外骨骼设备的减重优化。
日本名古屋大学与今仙技术研究院率先研发了全球第一台商业化无动力助行器ACSIVE。ACSIVE可为单侧髋关节提供助力,从而实现患者腿部助力功能。单侧质量为0.55 kg,可单独使用,也可以左右两侧同时使用。目前已经在日本医疗机构及养老机构进行大规模使用,效果得到了充分肯定[12]。
鉴于无动力外骨骼的众多优点及巨大的市场前景,综合分析了现有产品的优缺点后,本项目组深入研究了被动行走原理及下肢助力外骨骼的多项关键技术,在国家重点研发计划项目的支持下,研发了第一代无动力下肢外骨骼,并进行了相关测试及临床试用[13]7-8。实验结果表明,本项目组设计的无动力下肢外骨骼可为患者提供较大的髋关节、膝关节助力,并能有效纠正患者足内翻、足外翻症状。在临床试用过程中,得到了患者和康复治疗师的充分肯定。
尽管第一代无动力下肢外骨骼取得了阶段性的进展,但也存在一些问题,例如未针对半失能老人步态特征进行运动分析、调节机构结构复杂、调节方式繁琐、整机质量大、固定方式不稳、缺少必要护具、未充分考虑半失能老人操作需求等。因此,本文针对半失能老人下肢运动特点,建立了人体下肢运动学模型,推导了人体行走动力学方程。在此基础上,提出了面向半失能老人的无动力外骨骼结构方案,并进行了关键承力部件仿真分析,完成了绑带等柔性部件的设计及外观设计,最终加工了实验样机,进行了测试和实验。
1 半失能老人步态特征分析
医学界将60岁以上生活不能自理的人界定为失能老人。ADL(日常生活活动能力)标准中主要包含6项指标:穿衣、吃饭、上下床、上厕所、室内行走和洗澡。根据ADL标准,将失能老人分为轻度失能老人(1~2项无法完成)、中度失能老人(3~4项无法完成)、重度失能老人(5~6项无法完成)。而轻度失能老人及中度失能老人可划归为半失能老人。
有研究发现,对于成年人群,平均年龄每增加10岁,下肢肌肉质量将减少3.9%,70岁与30岁的人群相比,骨骼肌质量减少4.12 kg,四肢肌肉减少2.96 kg[14]。对于半失能老人,下肢力量衰退将导致下肢支撑力不足,同时伴随着神经控制力下降、神经传导速度减慢、动作反应时间延长等症状,在行走过程中,半失能老人常常无法保持身体平衡,造成跌倒,导致骨折甚至威胁生命。因此下肢肌力衰减是导致老年人下肢运动功能障碍的主要原因。
根据近几年对半失能老人步态的研究成果可知,半失能老人步长缩短,双腿支撑相周期延长,步速显著降低,跨步对称性减弱,步间一致性明显衰减[15]。而对于半失能老人的步速及步行周期而言,步速明显减慢,步幅及单步步长缩短,步行周期及单步耗时增加。在对半失能老人的髋、膝、踝关节的研究中发现,半失能老人的髋关节活动度明显增加,膝关节、踝关节活动度降低,行走时外八字现象增多[16]。由于半失能老人足跟部着地、膝关节屈曲、踝关节跖屈动作减慢,使半失能老人在行走过程中过于求稳而不求快,在摆动相摆动腿活动幅度减小,抬起高度降低,从而导致半失能老人在行走时出现脚尖、腿部“拖拉”现象[17]。表1所示为半失能老人与年轻人步行数据对比。
由以上分析可知,若要有效解决半失能老人下肢行走障碍问题,需在不明显增加其负重的情况下,对其髋、膝、踝关节提供有效辅助力。
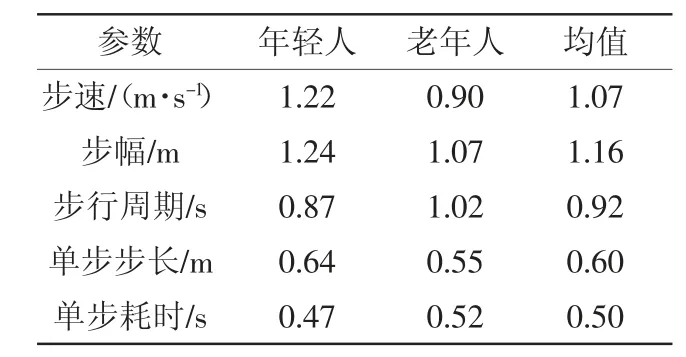
表1 步行数据
2 人体下肢运动学及动力学分析
根据人体结构相关研究可知,人体髋关节、膝关节、踝关节分别拥有3自由度、1自由度、3自由度,各关节运动角度如表2所示[18-20]。
将人体简化为五杆模型,各连杆长度及运动角度如图1所示。
其中θ1~θ5代表连杆与竖直轴的夹角,l1~l5代表人体模型各部位长度。设支撑腿为左腿,各关节在坐标系中的位置为(xi,zi)(i=1,2,3,4,5,6),点3与点4重合,代表同一个关节,踝关节高度为Hh,下肢各部位质量为mi(i=1,2,3,4,5),下肢各部位质心坐标为(xci,zci)(i=1,2,3,4,5),di(i=1,2,3,4,5)为各质心到下方关节的距离,则:
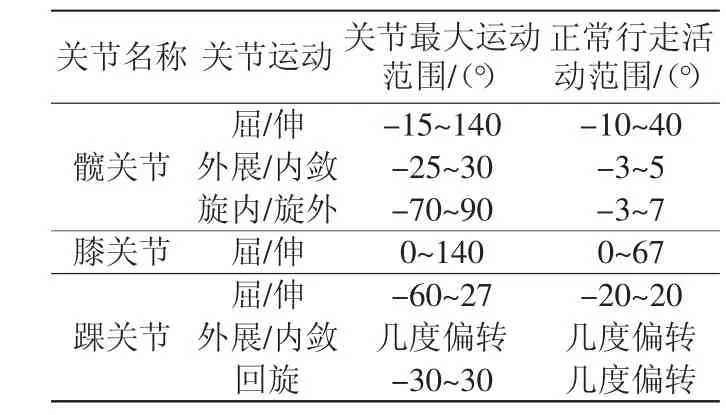
表2 关节运动角度
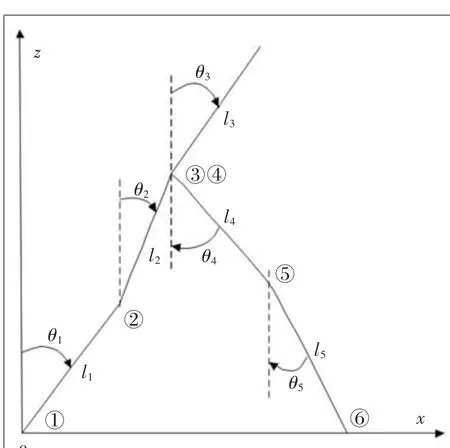
图1 五杆模型



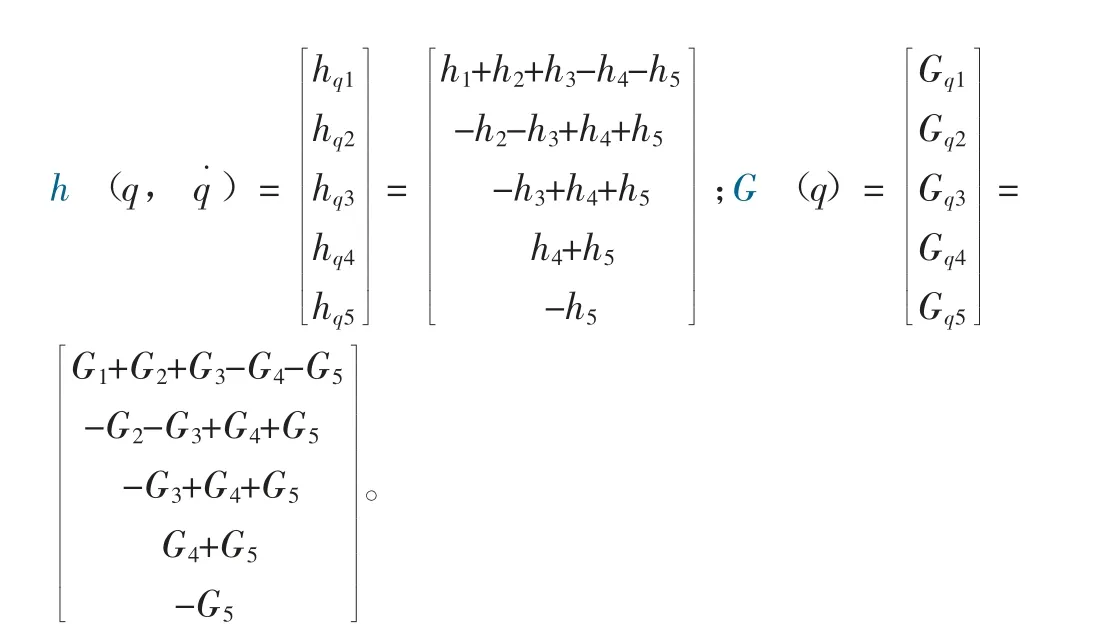
式中:p12=m2d2l1+(m3+m4+m5)l1l2;p13=m3d3l1;p14=m4l1(l4-d4)+m5l1l4;p15=m5l1(l5-d5);p23=m3d3l2;p24=m4l2(l4-d4)+m5l2l4;p25=m5l2(l5-d5);p45=m5l4(l5-d5);h1=p12sin(θ1-θ2)θ⋅22+p13sin(θ1-θ3)θ⋅32-p14sin(θ1+θ4)θ⋅42-p15sin(θ1+θ5)θ⋅52;h2=-p12sin(θ1-θ2)θ⋅12+p23sin(θ2-θ3)θ⋅32-p24sin(θ2+θ4)θ⋅42-p25sin(θ2+θ5)θ⋅52;h3=-p13sin(θ1-θ3)θ⋅12+p23sin(θ2-θ3)θ⋅22;h4=-p14sin(θ1+θ4)θ⋅12-p24sin(θ2+θ4)θ⋅22+p45sin(θ4-θ5)θ⋅32;h5=-p15sin(θ1+θ5)θ⋅12-p25sin(θ2+θ5)θ⋅22-p45sin(θ4-θ5)θ⋅42;G1=-[m1d1+(m2+m3+m4+m5)l1]gsin θ1;G2=-[m2d2+(m3+m4+m5)l2]gsin θ2;G3=-(m3d3)·gsin θ1;G4=[m4(l4-d4)+m5l4]gsin θ4;G5=[m5(l5-d5)]gsin θ5。

3 无动力下肢外骨骼结构设计
3.1 关节结构设计
第一代无动力下肢外骨骼(下文简称第一代外骨骼)助力关节采用扭簧作为动力源,扭簧线径为4 mm,最大工作转矩为5 N·m,最大工作角度为90°[13]2-6。在临床试用过程中,根据康复师及用户反馈,该关节助力大小可满足患者需求。因此,本文仍采用该规格的扭簧。
由于本项目研发的无动力外骨骼主要是面向半失能老人的一种可穿戴助力设备。由于半失能老人年龄增加,身体各项机能衰退,肌肉力量减弱,因此无动力外骨骼应具备操作简单省力、调节方便等特点。根据以上需求,本文设计了基于轴向插销固定式转矩可调节无动力助力关节,如图2所示。

图2 助力关节
图2(a)所示为助力关节外形,整个关节盒式的设计理念,将所有机构置于关节外壳内部,既保证了机构具有较好的封闭运行环境,又能保护用户与运转机构相对独立,有效避免了衣服等物品卷入机构所带来的危险。图2(b)所示为助力关节剖面图,结构可以分为上下两部分,上部分从左至右依次为关节固定板、定位插销、弹簧、插销盖板;下部分从左至右依次为关节固定板、关节外壳1、扭簧、高耐磨止动垫片1、轴套、高耐磨止动垫片2、关节外壳2、轴端挡片。扭簧的一端固定在关节外壳1的卡槽内,扭簧的另一端固定在关节外壳2的卡槽内。关节外壳1的内部凸台紧靠高耐磨止动垫片1一侧,高耐磨止动垫片1另一侧与轴套的端面紧贴。轴套的另一端与高耐磨止动垫片2的一侧紧靠,高耐磨止动垫片2的另一侧与关节外壳2内部凸台紧靠。轴端挡片通过超短头内六角螺钉与关节固定板下部凸起的关节轴紧密固定,将整个关节盒固定在关节固定板的关节轴上。关节外壳1的圆周方向上,均布有插销定位孔。患者在调节关节助力时,手动向上拔出定位插销,弹簧收缩变形,通过旋转插销将定位插销把手卡入定位槽中,此时定位插销无法下落,旋转关节外壳1,调节至合适的定位孔并对准定位插销下端。向上拔出定位插销,旋转定位插销至滑槽,松开定位插销,定位插销在弹簧恢复力作用下向下弹出,插入插销定位孔,完成助力关节转矩大小的调节。
3.2 腿部结构设计
在无动力外骨骼运行时,助力髋关节及膝关节轴线需与患者髋关节及膝关节轴向共线,否则在机体与患者中易造成运动干涉,威胁用户安全。因此对于不同身高的患者,需要调整腿部侧板的长度,使助力髋关节、膝关节分别位于患者髋关节、膝关节外侧。在腿部侧板长度调节的过程中,由于半失能老人多数存在无法大幅度弯腰及手部力量薄弱等症状,无法使用专业工具,如六角扳手等。因此无动力外骨骼腿部调节结构仍需具有调节方便、操作简单省力的特点。针对该需求,本文设计了按压卡簧式自动回弹腿部长度调节机构,如图3所示。
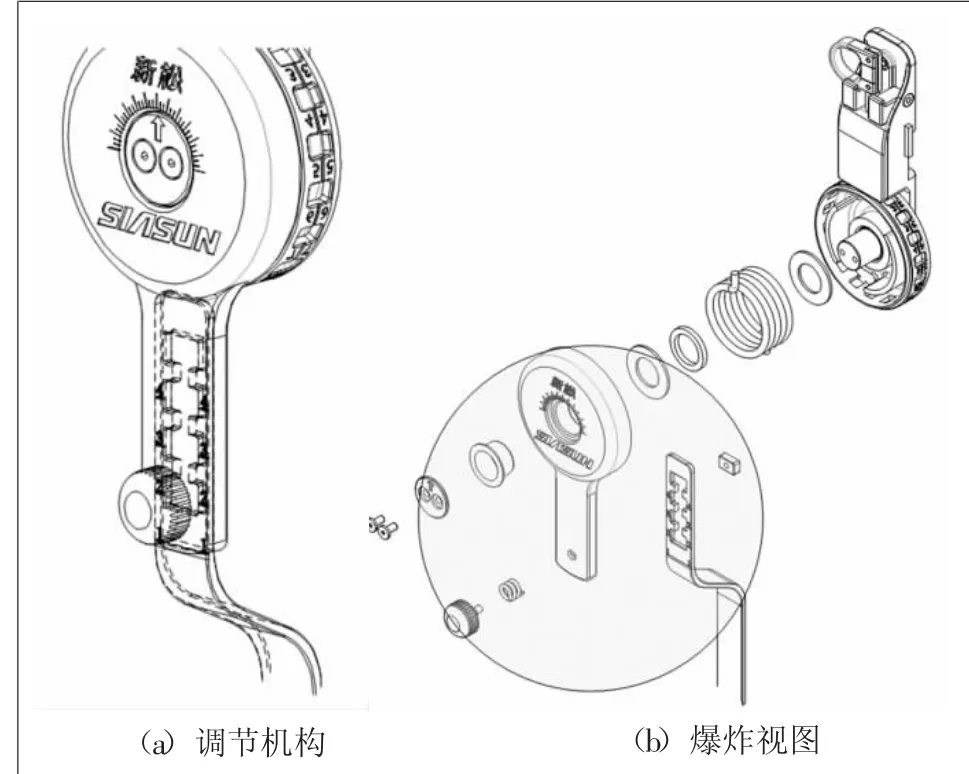
图3 腿部调节机构
图3(a)、图3(b)分别为腿部调节机构透视图及爆炸图。如图3(b)所示,腿部长度调节机构组成从左向右依次包括按压螺帽、弹簧、关节外壳2、大腿侧板、锁紧挡块。按压螺帽的螺纹杆穿过弹簧,使弹簧的一端卡入按压螺帽内的卡槽。弹簧的另一端与关节外壳2紧靠。按压螺母的螺纹杆穿过关节外壳2下部的通孔及腿部侧板上部的挡块卡槽,锁紧挡块在关节外壳2下部的另一侧与按压螺帽的螺纹杆旋紧。当患者调节腿部长度时,只需单手向内侧压紧按压螺帽,此时按压螺帽压缩弹簧,将锁紧挡块从腿部侧板的挡块槽中推出。然后患者可用另一只手向上或向下调节腿部侧板。调节完成后,释放按压螺帽,按压螺帽在弹簧恢复力作用下自动弹回,按压螺帽带动锁紧螺母自动回到腿部侧板的挡块槽中,将腿部侧板位置锁定,完成调节。整个过程无需专业工具,操作简单、省力,完全满足半失能老人的操作需求。
由于半失能老人中髋关节及膝关节力量退化程度不同,因此有些老人需要对髋关节及膝关节进行助力,有些老人只需对髋关节进行助力,因此在无动力外骨骼的结构设计中,应具有模块化装配及拆卸功能。因此本文将髋关节与膝关节设计成相同结构,便于模块化拆卸。膝关节可固定于大腿侧板下端,通过专门的卡扣结构进行固定,拆卸方便,模块化程度高,如图4所示。

图4 可模块化装配的助力关节
当患者髋关节、膝关节均需助力时,可在无动力外骨骼上同时装配助力髋关节及膝关节;当患者只需要髋关节助力时,可只装配助力髋关节,如图5所示。这种模块化装配的思想使无动力外骨骼使用方式及使用范围更加灵活和广泛。
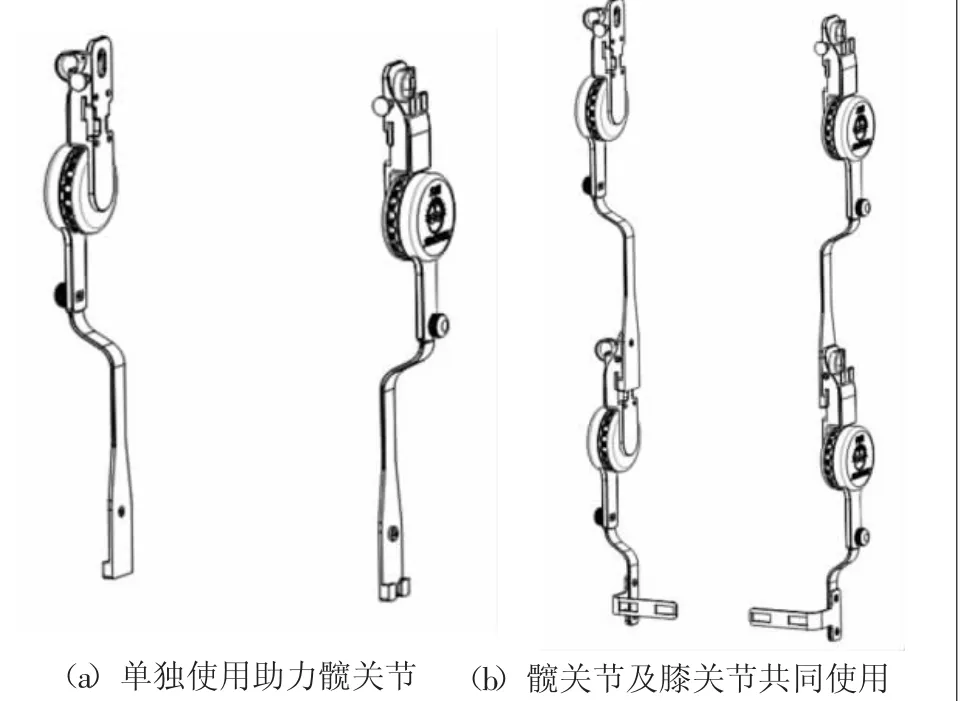
图5 无动力外骨骼的不同用法
3.3 腰部结构设计
腰部结构是将无动力外骨骼与半失能老人固定的有效部位,又是连接助力关节的桥梁。因此腰部结构必须符合人体工程学,而且具有多维尺寸调节功能。由于无动力外骨骼的重力主要由用户腰部承载,因此腰部结构还必须考虑与腰部绑带的固定方式。鉴于以上功能需求,本文设计了无动力外骨骼腰部结构,如图6所示。
图6为腰部结构,设计时充分考虑了人体工程学,其结构轮廓为流线形,外表面无尖锐凸出物,符合医疗器械标准规定。腰部结构在尺寸调节方面具备3个方向的调节功能,包括腰部宽度调节、腰部前后调节及髋关节上下调节。腰部宽度及腰部前后调节方式采用旋钮挤压,通过旋钮对部件的挤压,利用摩擦力将腰部部件锁定,无需专业工具,单手徒手即可完成调节。前后调节后的腰部结构如图7所示。
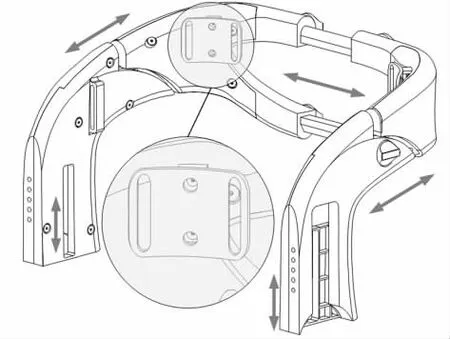
图6 腰部结构
髋关节与腰部结构采用卡槽方式进行固定,利用腰部前侧的定位孔进行上下调节。整个固定机构只需一个手拧螺母即可完成固定及拆卸,极大地降低了无动力外骨骼的操作难度,调节过程省时省力。图8所示为腰部结构与髋关节固定示意图。
大型油船辅锅炉汽包水位对其控制系统的要求较高,水位变化对设备的正常运行至关重要。为能满足控制精度和速度和对环境变化的适应能力,通常运用双冲量串级控制和三冲量串级控制。由于设备运行工况多变使得汽包水位系统表现非线性、时变和强干扰等特性,因此常规PID控制对汽包水位的控制效果欠佳。[1]
3.4 关键部件力学仿真分析
为保证无动力外骨骼结构能够稳定安全的运行,需对关节承力部件进行力学仿真分析。在运动过程中,主要承力部件有助力关节外壳1、助力关节外壳2、腿部侧板、定位插销、关节固定板等。本文以关节外壳1及腿部侧板为例,进行仿真分析。对于关节外壳1,该部件采用碳纤维材料,弹性模量为300 GPa,泊松比为0.31,密度为1.62 g/cm3,该部件受到扭簧对卡槽的转矩及插销对定位孔的周向阻力,扭簧最大转矩为5 N·m,图9所示为关节外壳1的应力云图。
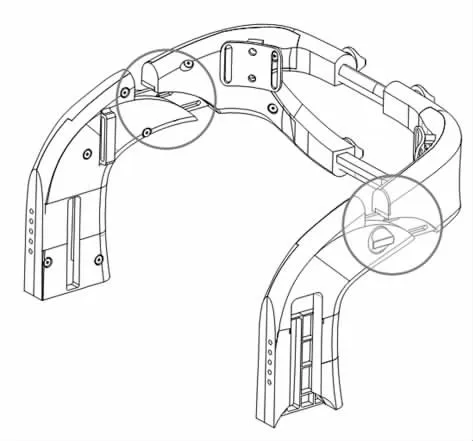
图7 腰部前后调节
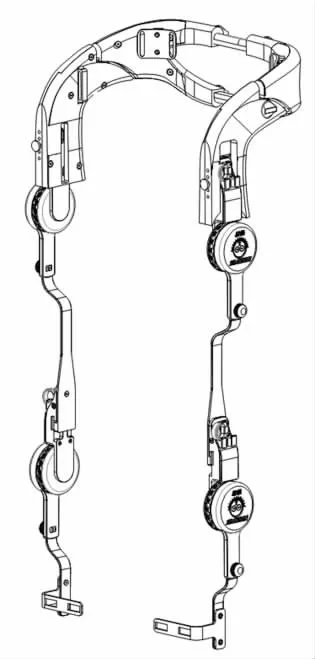
图8 腰、髋固定
由图9可知,关节外壳1在受到扭簧施加的周向5 N·m的转矩时,部件最大应力并未超过材料屈服强度,故满足设计要求。对于腿部侧板,其上下连接助力髋关节及助力膝关节,每个关节最大转矩为5 N·m,因此腿部侧板最大承受10 N·m的转矩,材料与关节外壳1相同。图10为腿部侧板应力仿真云图,由图10可知,腿部侧板在受到最大转矩作用时,部件最大应力并未超过材料的屈服强度,故满足设计要求。

图9 关节外壳1应力云图

图10 腿部侧板应力云图
4 绑带等柔性部件设计及外观设计
在无动力外骨骼工作时,需要与患者下肢可靠、紧密地固定在一起。由于用户是半失能老人,因此安全舒适的固定及保护部件对用户十分重要。本文针对半失能老人的下肢结构特点,设计了无动力外骨骼专用绑带,提出采用腰部、大腿、小腿三点固定的绑带安装方案,如图11所示。图11(a)为腰部及腿部绑带,腰部绑带采用1 cm厚海绵作为缓冲材料,海绵表面覆盖有高强度透气材料,用以增加腰部绑带的承载强度。在最外层覆盖有三明治透气材料,使绑带在使用过程中具有较好的透气性。腰部绑带具有上下两条锁紧腰带,腰带内侧布置有粘扣,腰带锁紧部分采用双向可调卡扣,卡扣可实现左右带长的调节,并能反向自锁,配合要带上的粘扣,实现腰带长度锁紧的双重保险。腿部绑带的设计理念与腰部绑带相似,不再赘述。图11(b)所示为柔性绑带的穿戴效果。
无动力外骨骼脚部提拉机构可使患者脚尖向上抬起,可有效解决患者行走过程中,由于脚尖拖地导致的跌倒、绊倒。因此脚部提拉机构是无动力外骨骼的重要组成部分,如图12所示。
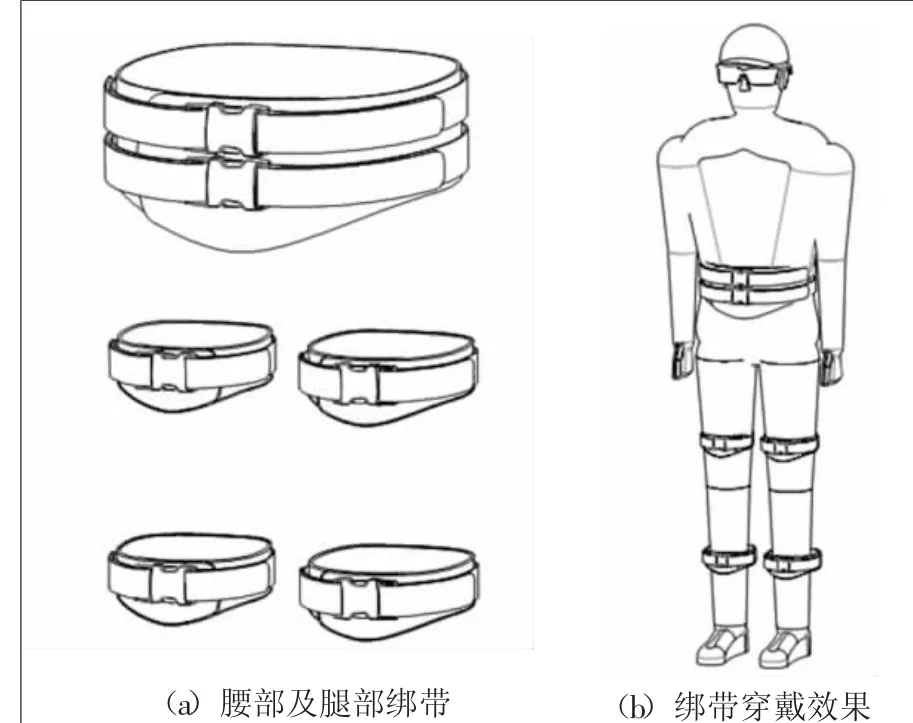
图11 绑带设计
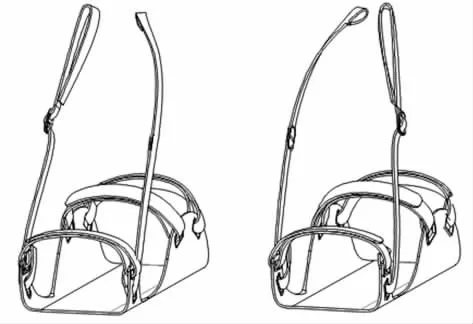
图12 脚部提拉机构
脚部提拉机构由防滑鞋底和可调节弹力带组成,防滑鞋底具有尺寸调节功能,可以与患者踝关节及足面进行紧密固定。可调节弹力带具有弹力调节功能,通过调节左右弹力带的长短实现提拉力的调节,从而实现对患者足内翻、足外翻的纠正功能。
针对以上结构设计方案,本文对设计的无动力外骨骼进行了外观设计,如图13所示。
5 样机加工与实验
根据以上设计,本文加工了无动力外骨骼产品样机,如图14所示。为测试无动力下肢外骨骼各项性能,本文进行了相关测试和实验,其中包括:结构质量测试、关节转矩测试、连续行走测试、上下楼梯测试,以及平地行走临床实验。
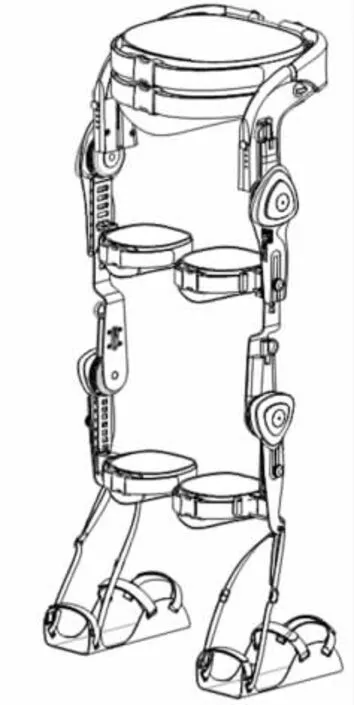
图13 无动力外骨骼整体效果
5.1 结构质量测试
本文采用强度高、质量轻的碳纤维材料进行加工。在保证各部件具有足够强度的前提下,极大地降低了设备质量,图15所示为结构质量测试。
图15(a)为无动力外骨骼整机质量,总质量为2.655 kg,整机质量包括腰部质量、大腿质量、小腿质量及所有标准件的质量。图15(b)为外骨骼助力部分质量,质量为1.725 kg,助力部分质量包括大腿质量、小腿质量及标准件质量。
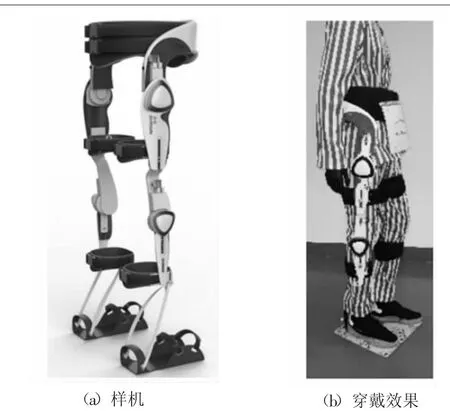
图14 无动力外骨骼样机
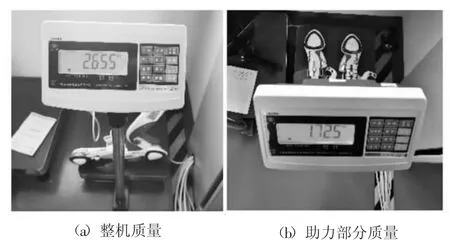
图15 产品质量测试
5.2 关节转矩测试
关节同一方向定位孔分为5挡,均布在关节外壳周向,腿部侧杆到关节中心距离为0.38 m,测试结果表3所示。
因此关节提供的转矩Ti(i=1,2,3,4,5)依次为:
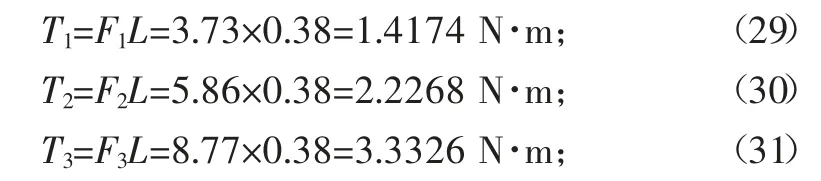

图16 关节转矩测试

表3 关节扭矩测试结果 N·m

经计算,关节最大助力为5.63 N·m,满足设计指标。
5.3 连续行走测试
为验证本文设计的无动力外骨骼在平地行走过程中的助力效果及柔性绑带的舒适性,本文进行了连续行走测试。选取身高1.5~1.9 m的实验人员10人,分别穿戴无动力外骨骼进行连续平地行走。实验场地为公司设备测试实验室内长10 m、宽2 m的平直防滑地面。实验时,用户穿戴外骨骼沿着指定路线连续行走50 m。图17所示为连续行走测试实验,实验结果如表4所示。

图17 连续行走实验
由结果可知,当操作人员将用户与外骨骼通过柔性绑带紧密固定后,用户均认为无动力外骨骼具有明显助力效果,整个实验过程无不适现象产生。
5.4 上下楼梯测试
为验证本文设计的无动力外骨骼在上下楼梯过程中具有明显的助力效果,本文进行了上下楼梯测试。测试场地为公司设备测试实验室外的标准楼梯间,楼梯高度为20 cm,宽度为30 cm,共18阶。选取身高1.5~1.9 m的不同实验人员共10人,进行测试,从楼梯顶端走到楼梯底端,再从底端走到楼梯顶端,为一次实验。图18所示为上下楼梯实验,实验结果如表5所示。

图18 上下楼梯实验
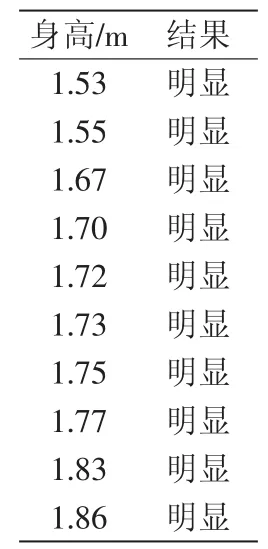
表4 连续行走实验结果
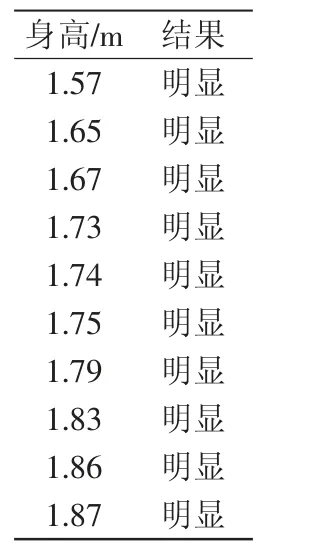
表5 上下楼梯实验结果
在10组实验中,实验人员均认为无动力外骨骼在上下楼梯过程中具有明显的助力效果。
5.5 平地行走临床测试
由于无动力外骨骼服务人群是半失能老人,因此本文进行了平地行走临床测试。测试地点为沈阳盛京康复中心第一康复训练室,用户为患有脑中风4期(轻度中风,可独立站立、行走,但行走需有人搀扶)导致下肢行走障碍的老人,选取身高1.5~1.8 m的患者16人。如图19所示,为平地行走临床测试,实验结果如表6所示。
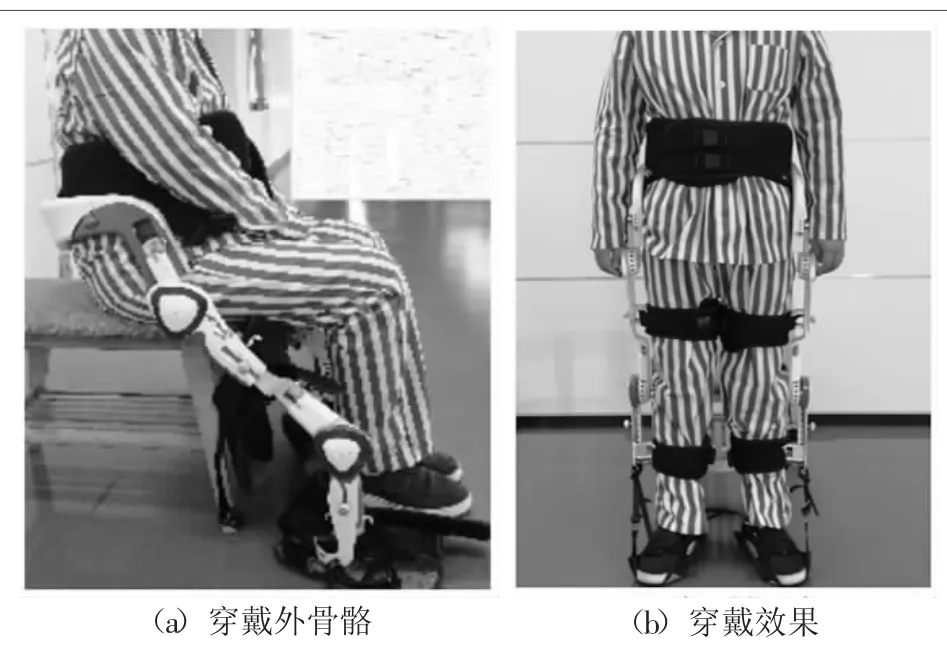
图19 临床测试
由临床结果可知,在测试的16组实验中,只有一名患者认为无动力外骨骼的助力效果不明显。这是由于该患者腰部过胖,导致绑带无法紧密固定,在行走过程中外骨骼与患者产生了相对运动,助力关节的驱动力无法有效地传递到患者下肢,其余15组患者均认为无动力外骨骼具有明显的助力效果。

表6 临床行走实验结果
6 结 论
1)本文对半失能老人的步态特点进行了详细的分析,建立了人体下肢运动模型,推导了人体行走动力学方程;
2)面向半失能老人,本文设计了无动力下肢外助力外骨骼。该外骨骼具备腰部、大腿、小腿长度调节功能,具备髋关节、膝关节、踝关节模块化装配功能;
3)为更好地保护患者,针对半失能老人,本文设计了外骨骼专用柔性绑带,增强了外骨骼的穿戴舒适性和安全性,并对无动力外骨骼进行了外观设计;
4)基于理论研究成果,本文加工了无动力外骨骼样机,并进行了相关实验和临床测试。实验及测试结果表明,在使用了碳纤维材料加工后,机体质量更轻,强度更高;平地行走、上下楼梯均具有较好的助力效果。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
玩具世界(2022年2期)2022-06-15
小哥白尼(野生动物)(2021年12期)2021-03-29
西南交通大学学报(2018年6期)2018-12-18
中老年健康(2016年11期)2017-02-05
大众健康(2016年3期)2016-05-31
恋爱婚姻家庭·养生版(2016年5期)2016-05-06
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14
中医研究(2013年9期)2013-03-11
