
民航空管复盘综合分析系统研究与实现
2021-01-18 03:37陈恺
现代计算机 2020年32期
陈恺
(中国民用航空中南地区空中交通管理局广西分局,南宁 530000)
0 引言
流量管理系统是当前研究热点,其合理性、客观性也显得尤为突出。复盘系统作为流量管理系统的辅助系统,既能实时显示目标航迹态势,也能对复盘数据进行回放与评估,可以结合当时情况下的扇区容量,叠加计算管制员发话频次,波道繁忙程度,以及偏离计划航路的航迹的占比[1],判断流量管理措施是否合理,有利于后续空管工作运行总结。然而目前国内针对空管复盘分析评估软件系统的研发相对滞后,现有的系统中存在功能比较单一、复盘态势信息反馈不够全面、航迹目标回放机制不够灵活等问题。这些问题的存在,影响了复盘工作评估的效果,制约了航班正常性工作的发展。此外,南宁区域地处热带亚热带地区,每年雷雨、强降水等复杂天气周期较长,对航班正常性工作提出严峻考验。各部门应加强复杂天气条件下的空管运行复盘工作,不断总结得失经验,有效提升天气预警信息与管制运行的融合程度,为后续工作的开展提供有力支撑[2]。因此,研究一套可提供复盘数据的可视化系统,对复盘工作和提高航班正常性工作具有极大的指导意义。
为了满足空管运行复盘工作的需求,设计基于Ja⁃va的空管复盘分析系统。该系统集雷达目标的实时显示、目标复盘情况的实时统计(如包含单位时间段内复盘目标总个数或目标偏离航路指定距离的个数统计)、目标复盘态势回放、复盘情况评估报表生成等多种功能于一体,能够更为全面、真实反馈复盘目标当时运动态势和数据信息,通过复盘分析系统提供的复盘数据,能汲取工作经验并及时研究改进措施,建立科学评价体系,有效提升管制运行效能和策略研究。
1 系统实现原理
空管复盘分析系统通过UDP协议接收莱斯或华泰自动化的综合航迹数据(ASTERIX的062类格式),通过RS-232协议接收多普勒雷达气象回波云图信息。然后复盘系统将接收的数据进行解析、封装,生成并维护有效、实时的航迹信息和云图信息,并通过图形叠层显示(顶层为实时的综合航迹目标运动态势,中间夹层为区域航路地图,底层为多普勒雷达气象回波云图)在复盘分析系统HMI界面进行显示。
解析封装完毕的数据将进行复盘数据储存,用于复盘数据回放。复盘回放模块采用多线程技术,用户可根据实际情况回放规定时间段内航迹运动态势,并可调控回放进度和回放速度。此外,系统提供目标复盘情况的实时统计(如包含时间段内复盘目标总个数或目标偏离航路的个数统计),以图表形式呈现给用户。
复盘系统分为两大功能模块:一是实时显示与统计功能模块;二是复盘回放与复盘评估功能模块。针对两大功能模块的具体功能,系统初步设计了四个子模块,包括:航迹实时显示模块、复盘目标统计模块、复盘回放模块和复盘评估报表模块,其结构原理图如图1所示。
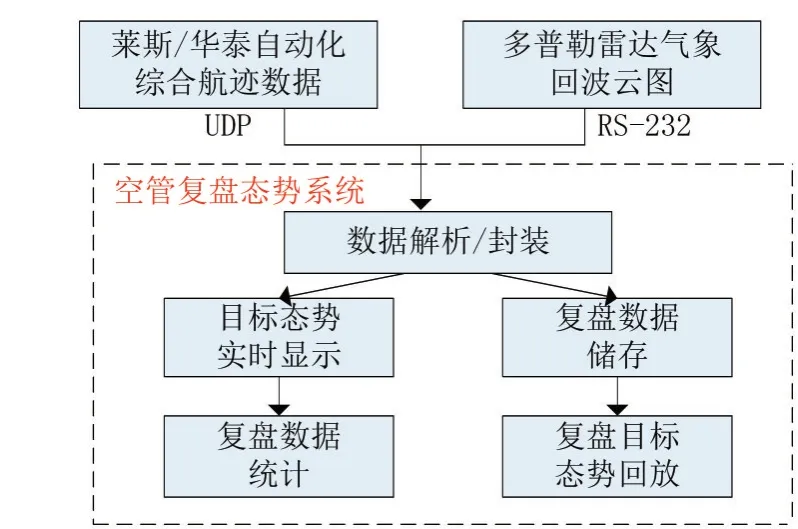
图1 复盘分析系统结构框图
2 关键算法研究
2.1 气象云图数据解析
气象云图一般以强度为度量单位,在单雷达气象数据中,通常强度分为2、4、6、8,本设计将系统云图强度等级以4为度量单位,其它单路气象雷达云图转换为系统云图强度等级关系如表1所示。
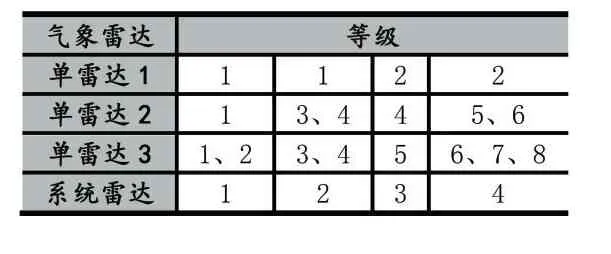
表1 气象云图强度等级转换关系表
气象云图可用一个具有m个顶点的多边形表示,其绘制步骤为:首先根据轮廓点序列在区域地图画出m个顶点,然后依次用线段将各顶点进行连接,构成一个m边形,最后多边形根据气象云图的强度等级进行着色,强度越大,显示云图的颜色越深。
系统对气象云图数据进行更新与丢弃,使HMI界面实时显示云图信息。对于单路雷达气象数据更新,可以采取航迹处理类似方法,即在雷达每一个扫描周期内,对接收的云图数据进行在线解析,同时输出一个更新标志位,表示当前区域所扫描的云图信息已更新。当在VSP时间内未收到云图数据信息,系统对该云图进行丢弃处理,其处理流程如图2所示:
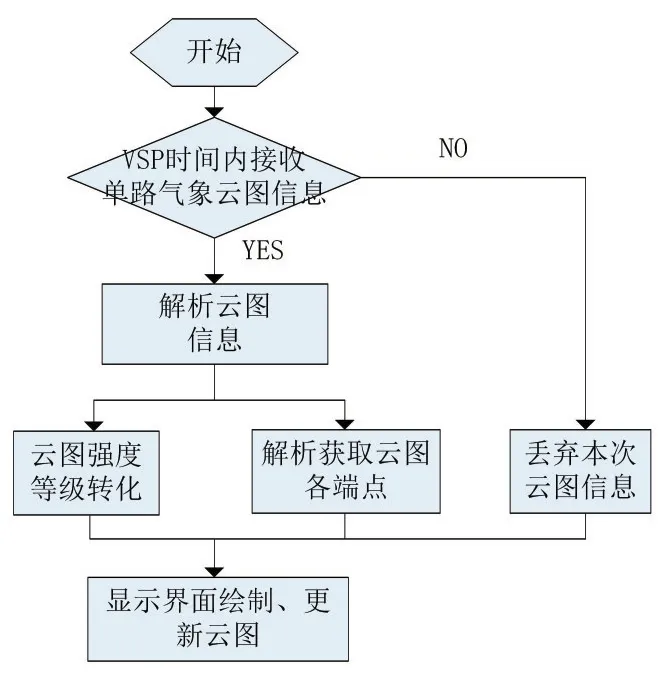
图2 单路气象数据处理流程图
2.2 气象云图关联算法
相关波门是以某次雷达扫描的预测值为中心的一个空间区域,能确定一个观测(顶点)是新目标还是与已知顶点相关的初步验证,落入相关波门内的观测才进行下一步的顶点观测配对。
假设系统气象云图由一块N个顶点的云图C和一块M个顶点的云图D组成,其顶点分别为和对于D的任一顶点总存在一个顶点( )xj,yj满足以下条件[3]:
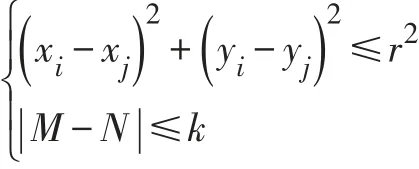
则云图C和云图D满足圆形波门的相关位置,其中,r为圆形波门的半径,k为系统允许云图之间顶点数的最大偏差值。当满足矩形波门位置相关时,存在如图3关系,其中,Δx和Δy分别为矩形波门在x和y方向的数值大小,当Δx=Δy=r时,矩形波门为相应圆形波门的外接矩形。
由于圆形波门波门尺寸与矩形波门比较相对较小,可以减少无关云图数据落入波门的概率,但计算量较大;矩形波门增大了波门尺寸,增大无关云图数据落入波门的概率,但减少了计算量[4]。鉴于此原因,本设计采取了使用一个较大尺寸粗略的矩形波门,圆形波门处理内部气象云图数据的计算模型,该模型结合两者优点,能优化云图的关联算法,减少计算迭代性,当两块云图面积大小接近时,可以等效认为两块云图相关。
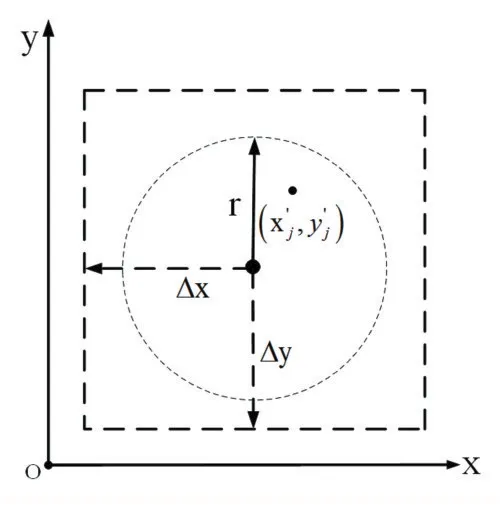
图3 气象云图关联算法模型
2.3 气象数据融合算法
复盘系统中所引接气象云图数据为系统融合气象数据,需要采用算法进行气象云图数据融合。常规融合算法有加权平均法、马赛克法,加权平均法的核心思想为对每引接的单部气象雷达云图数据一个加权系数,各单路雷达云图参数(如浓度、密度等)根据权重系数参与系统融合气象数据计算[5],该算法能全面遍历各单路气象雷达数据,但计算量大。马赛克法则将管制空域划分为等额面积的马赛克块,每块马赛克赋予不同气象雷达优先级别[6],当某块云图位于某区域马赛克时,优先采用较高级别的单雷达气象云图去更新系统综合气象云图,该算法计算量小,但每块马赛克没有充分利用另外冗余气象雷达所提供的气象云图数据。
本设计提出一种加权平均和马赛克综合法,即对于已经和系统气象云图关联的某单路气象云图数据采用加权平均进行计算;为提高传感器气象雷达数据实时控制,加权平均系数可采用马赛克计算方法。为了验证本算法有效性,利用Java编译环境进行融合算法仿真,图4是雷达R1、R2、R3均探测到某一块气象云图,假设三部气象雷达加权系数分别为,马赛克算法中雷达优先级P按照雷达与所扫描目标云图的距离进行设置,假设为PR1>PR2>PR3。融合效果如图4所示,符号表示融合算法的仿真效果,其实验结果比较平滑,该融合算法既综合考虑三部雷达的实时探测结果,提高了融合结果的精度性,又能动态根据加权系数进行计算,耗时较小;而对于三部雷达,采用加权系数或马赛克单一算法,其仿真结果数值矢量摆动性较大,在每一个马赛克内只考虑优先级最高雷达的马赛克效果,且加权系统难以确定,导致计算耗时长,精度性低。
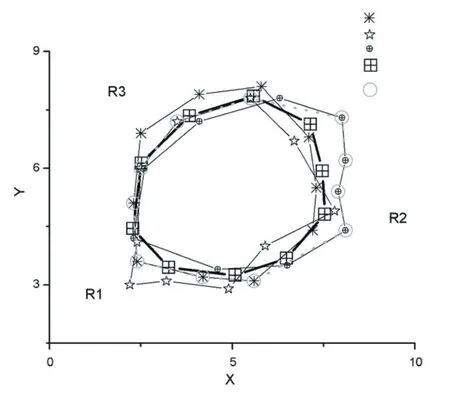
图4 加权平均和马赛克融合算法
2.44 D航迹剖面算法模型
4D航迹主要用于复盘系统4D预测计划航迹的形成,即将航空器水平剖面、高度剖面、速度剖面进行分解研究,最后将各阶段的航迹特征点集合进行拟合[7],形成基于飞行计划的4D航迹。设计基于综合航迹和MH4029.3计划信息,建立4D航迹模型,其算法如图5所示。
(1)系统首次接收MH4029.3的IFPL计划报时,建立目标航迹的初始4D剖面模型;
(2)当收到起飞报后,以实际起飞时间(ATD)为基准,重新修正目标航迹的初始4D剖面模型,进一步推算出目标航迹入界和经过各航路点的时间、高度、预管制扇区等剖面信息;
(3)利用目标实时航迹信息和电子移交(以下简称:AIDC)[8]的EST电报对航空器进行预管制扇区流量的最后一次修正。当收到EST报时,目标航迹会根据EST报的移交高度XFL进行预管制扇区的投递,修正目标航迹4D剖面模型;
(4)进入本管制区域后,系统能根据实时雷达航迹修正过点信息,更新目标航迹4D剖面信息;
(5)根据管制员操作所更新的指令高度PCFL[9],触发航班4D剖面信息的变化,重新计算飞行剖面,及时更新4D剖面信息。
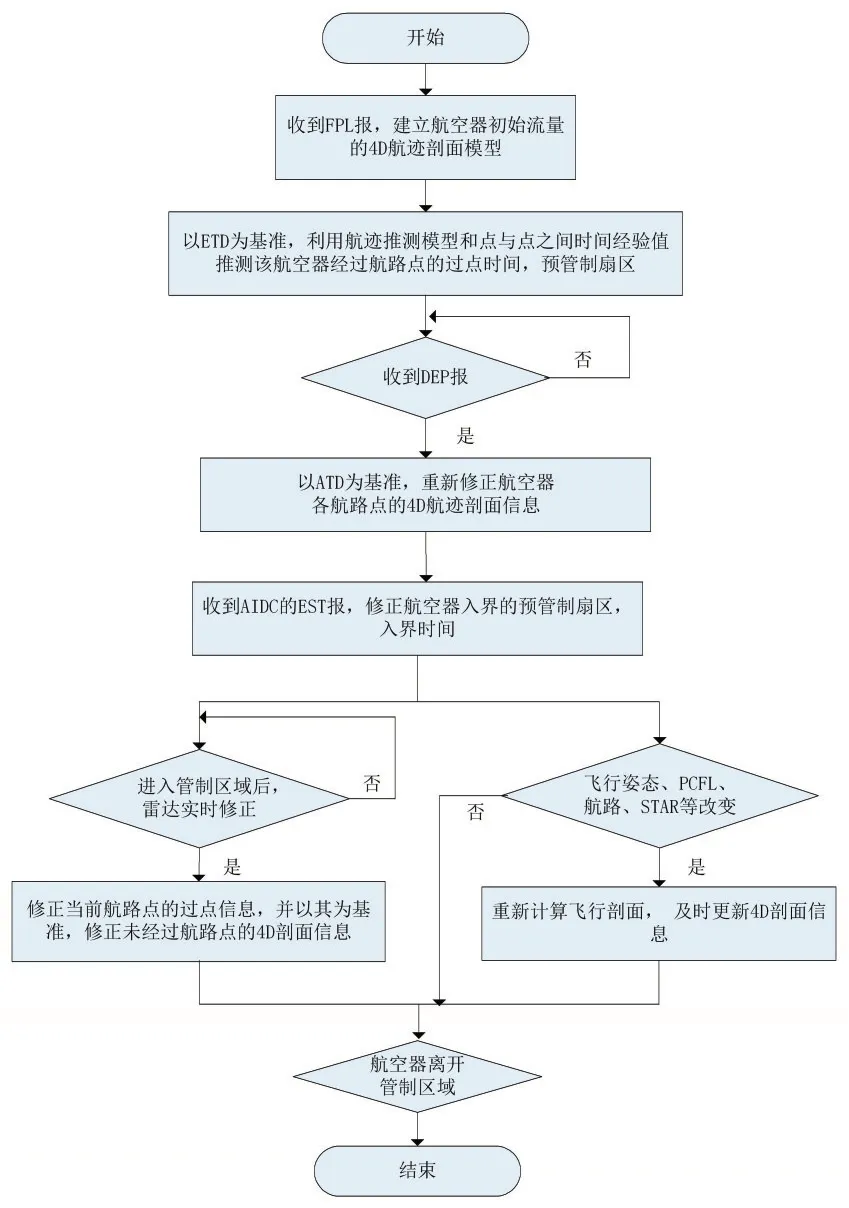
图5 4D航迹剖面模型流程图
2.5 系统航迹设计模型
复盘分析系统监视数据处理模块主要收集自动化系统通过UDP协议送来的综合航迹数据,并根据CAT062数据格式定义进行数据项的分解,提取出主要信息,包括目标的属性、识别符(二次代码、航迹号、地址码等)、位置、高度、速度等。对这些数据项进行合法性检查后,将通过质量检查的目标信息WGS-84坐标系转换以南宁系统处理中心为原点的直角坐标系并投影到系统平面上,然后参与综合航迹的跟踪处理。
其计算模型如图6所示,假设Mrdp_HaspMap哈希表存放所有目标最新的航迹信息,当监视数据处理模块收到某一目标数据时,将解析的该目标航迹号与Mrdp_HaspMap的航迹号进行遍历比较,如果存在相同航迹号,则认为本次收到的目标信息为对应航迹目标的更新信息,系统将刷新此目标的状态描述,更新Mrdp_HaspMap;反之,则在Mrdp_HaspMap目标信息列表建立一个新的航迹目标。由于复盘系统要存储若干历史航迹信息,在存在相同航迹号的条件下,将本次接收的目标航迹数据存放在HisList[Track_num][0]中,HisList是一个以航迹号为行,历史航迹个数为列的二维数组,对于历史航迹数据存放,则在循环遍历中使用迭代法:HisLis1[Track_num][i]=HisLis1[Track_num][i-1](1<=i<=hisCount-1)。
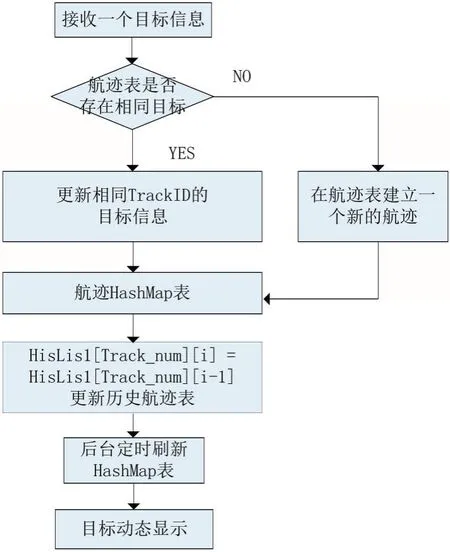
图6 系统航迹计算模型
3 系统运行效果
系统采用C/S架构,复盘系统服务器主要作用是解析自动化系统传送的综合航迹数据和气象云图数据,并储存数据,并通过SNMP协议与复盘显示终端通信,将解析封装完毕的数据显示在复盘态势终端,形成实时目标航迹态势和气象云图信息。航迹回放功能则调取复盘服务器对应时间段的储存数据,在复盘态势终端实现航迹回放功能。其主界面如图7所示。
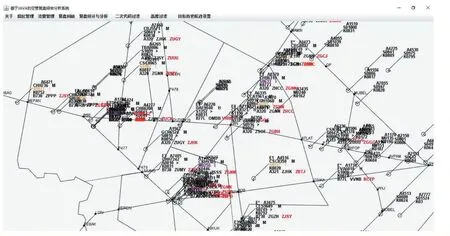
图7 系统主界面图
系统可支持以下常规操作:
(1)态势界面显示范围进行放大、缩小、平移操作;
(2)可对目标进行测距、标牌拖拽;
(3)目标高度和SSR过滤;
(4)目标航迹回放功能;
(5)统计时间段内复盘目标的个数,统计目标偏离航路固定点的目标个数,以图形柱体表示,方便查看时间段内流量管理情况;
(6)告警提示:无效高度(以“INV”表示),无效 SSR(以“????”表示),偏离航路RAM。
此外,系统预留引接广州云数据中心数据(如飞行计划数据、基础数据等)接口,为本系统提供必要的数据来源,实现数据共享、移植、创新挖掘等作用。此外,复盘系统可将储存的航迹和气象数据,通过本地的云数据系统,向广州云数据中心提供本地空管业务数据(如本地雷达综合航迹数据、气象云图数据等),以便进行大数据分析、数据质量管理、有效对数据进行运维管控,复盘分析系统扩展性结构图如图8所示。
4 结语
基于Java的空管复盘综合分析系统,采用模块化设计,提高了系统的可扩展性和可维护性;本方案所提及利用自动化综合航迹输出信号和多普勒气象云图作为复盘系统航迹输入源,能准确无误显示目标运动轨迹和云图变化情况。该系统运用数据库技术实现了系统信息的共享性和数据封装性,实现复盘数据回放。整个系统具有可靠性高、响应速度快、易于扩展等优点。该系统能复现当时运行过程中的气象数据、雷达航迹数据、流量管理策略数据等,为后期相似环境下指导航迹目标如何运行提供数据支撑,在空管单位具有广泛的应用前景。
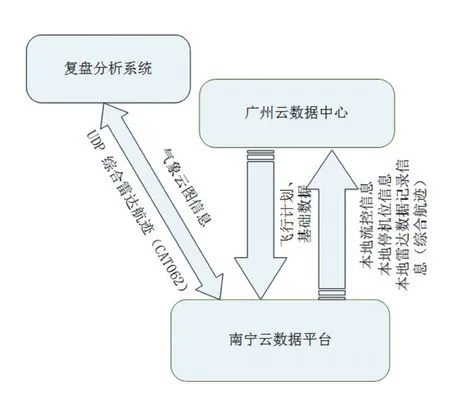
图8 复盘系统引接云数据中心结构拓扑图
猜你喜欢
航空学报(2022年9期)2022-10-14
导航定位学报(2022年4期)2022-08-15
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
计算机与网络(2021年4期)2021-05-04
早期教育(美术教育)(2018年1期)2018-02-25
文艺生活·中旬刊(2017年8期)2017-09-15
智能制造(2015年9期)2015-10-15
小天使·四年级语数英综合(2015年3期)2015-04-20
