
一种大型相控阵在线校准方法
2021-03-16 08:30敦书波姜海玲
无线电工程 2021年2期
刘 晓,敦书波,姜海玲
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
相控阵天线[1]由于种种原因无法将各通道的幅值与相位做到完全一致,特别是相位的高度一致更难满足,而这又直接关乎其波束合成效率[2]。因此对相控阵的校准显得尤为重要。目前主流的校准方法[3]主要有以下几种:
内场校准法[4]:该方法通过在有源组件和天线单元之间加入耦合器,通过测量耦合出的能量得到各通道间的幅相差值[5]。其主要缺点是设备量巨大,不经济,而且无法对阵面变形以及阵元安装精度进行校准。
近场校准法[6]:该方法通过扫描架的探头对阵列闭合面上的电场进行采样,经过精密的数值计算得到各阵元的远场方向图和各通道的幅相分布。该方法虽然测量精度高,但是对于大型相控阵来说,对暗室空间、扫描仪器的同步性要求很高,扫描时间长、效率低的同时并不适用于对相控阵进行实时监测校准[7-8]。而对于长期处于室外应用环境中的相控阵天线,其通道的可靠性、稳定性是很难保证的,这就需要定期对其进行标校,此时近场校准的实用性及经济性大大降低。
耦合校准法[9]:该方法基于阵列当中相邻单元互耦系数相同的前提,通过相邻单元的收发测试得到各通道的幅相信息,进而得到通道间的幅相差值[10]。该方法虽然无需另外架设天线,但其仅适用于收发共口面的相控阵,同时该方法对阵元方向图的对称性上要求极其苛刻,几乎很难满足要求。
远场校准法[11]:该方法常用的有旋转矢量法,通过在远场架设校准天线测量整阵的和信号随单个通道相位变化的曲线,通过特定算法得到各通道间的幅相值[12]。该方法的主要问题在于对大型相控阵来说单个通道的相位变化很难引起整阵和信号的明显变化,由此带来的测量误差是很明显的。对于所有远场校准方法,要满足大型相控阵的阵列远场条件需要很远的距离[13],对于很多应用环境十分不便。
综上所述,对于大型相控阵的校准工作需要一种更加有效、快速、便捷且经济的校准方法。
1 中场校准原理
鉴于上述原因,本文提出了一种中场校准方法。该方法无需在阵列远场架设校准天线[14],也对阵元的方向图无特殊要求,仅需在距离阵面一定距离处架设校准天线即可,需要注意的是架设距离以及校准天线的位置需保证校准天线位于所有天线阵单元的主波束内。
以待校准相控阵为接收阵加以说明。距离阵面一定距离架设发射校准天线,并尽量保证其正对阵面中心,有利于校准天线在较短的距离处位于所有阵元的主波束内。校准时将待测子阵接通,其他子阵处于负载态。校准天线发射电磁波,待测子阵接收并将其经馈电网络及组件等传递给校准接收机。接收机收到的相位值可表示为:
(1)
式中,i为子阵编号;li为校准天线到待测子阵的空间路径;λ为自由空间中的波长;PΔi为各通道的相位差。根据式(1)通过求得校准天线到待测子阵的空间路径li,可得到各通道的相位差:
(2)
建立相关坐标系,将子阵及校准天线的位置用坐标进行表示。将阵面定义为XOY面,子阵的位置可以表示成(Xi,Yi,0),校准天线的位置可以表示成(X0,Y0,Z0)。但对于移动平台上的在线校准,通常由于振动、阵面收折和校准天线安装等因素会使校准天线每次使用时,其实际准确位置是未知的,将其表示为(X0+Δx,Y0+Δy,Z0+Δz),此时校准天线到每个阵元的路径长度可以表示为:
(3)
对于频率较高的相控阵,位置的少许偏差将会对校准结果产生显著的影响。对校准天线准确位置的求解也是本方法的核心。
本文阐述的校准思路是以校准天线的最初位置(X0,Y0,Z0)为基准点,通过在一定范围内不断地搜寻,找到校准天线的实际准确位置,进而求得实际的li,最终求得PΔi。
根据实际工程经验,对于大型相控阵天线,其通道数足够多,此时通道间的相位一致性的数学期望是归于零的,这是搜索校准天线准确位置的判据,即:
(4)
式中,n为通道数;δ为很小的量,作为搜索收敛的依据,该值一般取值在1以内,可在实际工程应用中进行适度修正。该值的选择主要与通道数规模有关,通道数越多,该值取值越小,最终得到的结果越精确,由于篇幅有限,不再对其取值及其对应的收敛速度及精度进行阐述。
2 实验验证及分析
针对上述校准原理,实验验证以实际项目为背景,阵列为Ku频段一维扫描相控阵天线。阵列规模为10×160共1 600个单元,阵列尺寸为4.8 m×4.8 m。
2.1 校准天线位置求解
校准天线实际位置求解及验证过程如下:
① 赋予1 600个通道相位初值,该值在一定范围内随机分布,其期望值接近0;
② 赋予校准天线初始位置,并将其偏离初始位置一定距离;
③ 在校准天线实际位置附近搜寻,每次赋予一个新的位置坐标,计算校准天线与各阵元的路径li;
④ 根据式(2)求解通道相位初值PΔi;
⑤ 设定门限值,根据式(4)判断收敛与否,利用计算得到的校准天线位置,根据式(2)反推各通道相位初值PΔi′与一开始赋予的初值PΔi进行比对。
仿真验证,仍然以上文介绍的4.8 m×4.8 m阵列为例,1 600个通道初始相位值在±20°内随机分布。校准天线距离阵面150 m(该距离可保证校准天线位于所有阵元主波束内,又远远小于阵列远场距离),人为将校准天线分别在X,Y,Z三个方向上偏离一定距离。经迭代运算得到PΔi′,PΔi′-PΔi误差示意如图1所示。
由图1可以看出,该方法可以将校准天线的位置准确地求解出来,通过求解出的校准天线实际位置反推得到通道相位初值PΔi′与实际初值具有很好的吻合性,验证了算法的有效性。
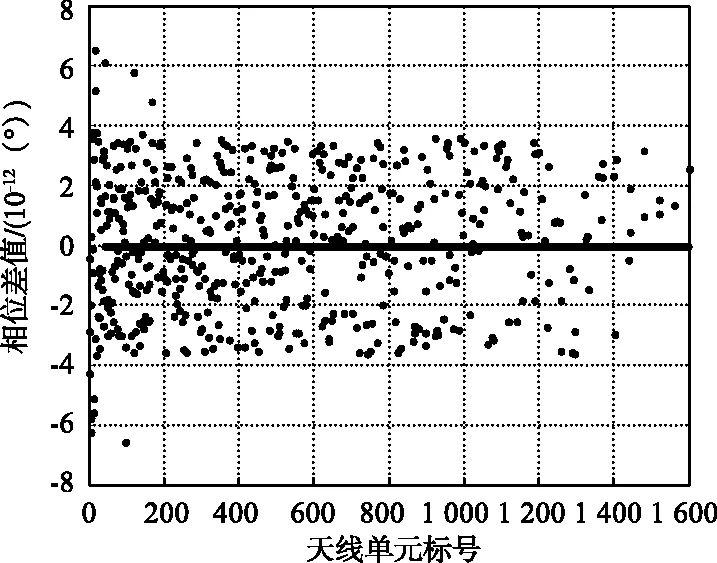
图1 误差示意Fig.1 Error schematic diagram
2.2 校准流程
整个校准系统由校准接收机、校准天线、电缆组件等与待校准阵列共同组成,组成及原理框图如图2和图3所示。
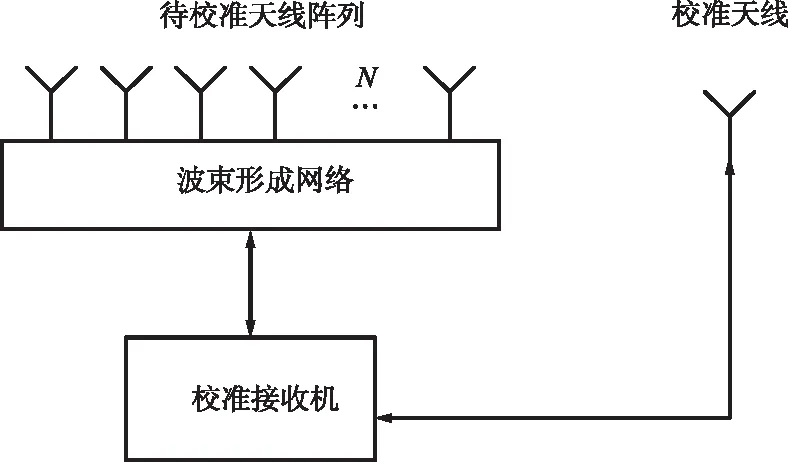
图2 校准系统组成框图Fig.2 Block diagram of calibration system composition
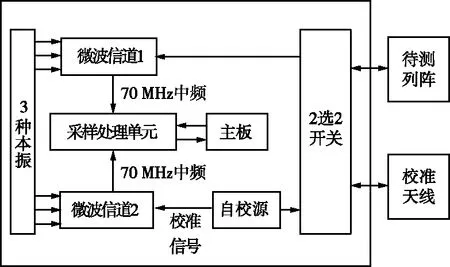
图3 原理框图Fig.3 Functional block diagram
校准接收机内部工作流程:主板接收上级指令,根据指令通过2选2开关完成发射路及接收路的切换。若校准阵列为接收状态,则将其输出端接通到校准天线,输入端接通到待测阵列;若校准阵列为发射状态,则将其输出端接通到待测阵列,输入端接通到校准天线。同时控制微波自校源完成自校信号的输出,控制采样处理单元完成2路信道的中频采样,并将采样结果进行处理回传上级。
以阵列为接收阵加以说明,在实际校准过程中基本步骤如下:
① 待测有源子阵中收发组件切换为接收状态,并将其他通道切换成负载态;
② 校准接收机通过内部的2选2开关将其输出端接通对应校准天线,输入端接通到待测阵列;
③ 校准接收机通过校准天线发射待测频段信号,同时读取待校准子阵接收到的信号相位Pi;
④ 切换下一个待测有源子阵,重复③,直到测得所有子阵的相位值;
⑤ 按照上一节的校准思路,通过校准接收机内置算法对测试数据进行处理得到整个阵列各单元的相位差值。
2.3 结果验证
以现有相控阵进行实测验证,测试场景如图4所示。该相控阵为Ku频段一维相控阵,利用上述步骤对该阵列进行测试校准,校准前后的方向图对比如图5所示。
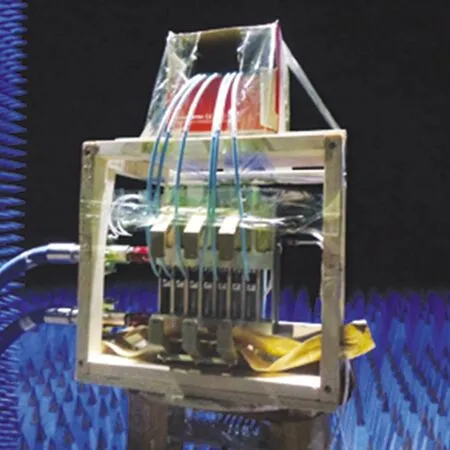
图4 实测场景Fig.4 Actual measurement scene
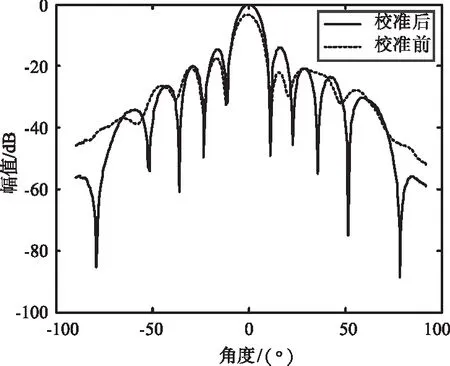
图5 方向图对比Fig.5 Patterns Comparison
3 结束语
该校准方法为中场校准,避免了远场校准不够便捷的同时,也不用像耦合校准一样对阵元方向图的对称性有严格要求[15-16]。该校准方法无需对组件进行频繁操作,只需接通待测通道的同时将其他通道切换成负载态即可测得通道整个频段的相位信息,具有很高的测试效率。
该校准方法适用于大型平面相控阵系统[17],由于校准天线处于子阵主波束内,处于子阵的远场距离,故其对不同子阵的极化及轴比差异可忽略。本文仅针对固定波束做了相应验证,波束指向精度的研究有待进一步开展。
猜你喜欢
舰船电子对抗(2022年5期)2022-11-25
电子技术与软件工程(2022年8期)2022-07-08
电子机械工程(2022年2期)2022-04-25
舰船电子对抗(2021年1期)2021-04-15
舰船电子对抗(2019年4期)2019-09-10
液晶与显示(2019年5期)2019-06-11
系统工程与电子技术(2016年4期)2016-08-24
火控雷达技术(2016年2期)2016-02-06
移动通信(2014年22期)2014-12-26
中国舰船研究(2014年6期)2014-05-14
