
深空探测天线自抗扰控制技术研究
2021-03-16 08:30刘亚兵弓喜忠
无线电工程 2021年2期
陈 兴,赵 鞭,刘亚兵,相 锋,弓喜忠
(西安卫星测控中心,陕西 西安 710043)
0 引言
深空探测天线在指向和跟踪目标时,由于其体积巨大,外部扰动(天线抖动、风扰动)影响也随之变大。目前深空探测伺服系统的设计思想为被动抗扰思想,即采用经典PID控制理论。传统PID控制器结构简单、参数易于调整,在工程中广泛应用,但在超高频和超大型天线中,其抗扰动能力不足的缺点,使其难以满足高精度指向和跟踪的需要[1-2]。
自抗扰控制(ADRC)技术是由韩京清教授根据多年实际控制工程经验提出的新的控制理论。它是一种以扩张状态观测器(ESO)为核心的新型控制技术,是对传统 PID控制技术的继承和发展。“自抗扰控制思想”指出了控制的核心是抗扰,为重新认识控制问题的本质和指导解决实际控制问题提供了一种全新的思路。美国Cleveland州立大学的高志强教授通过参数化的方式,给出形式简单的线性自抗扰控制(LADRC)技术,它的控制参数少而且物理意义明确,十分便于现场调试[3]。
面对未来深空探测任务对天线伺服系统提出的新要求,结合目前工作中遇到的实际问题,本文以某深空探测设备位置环为控制对象,设计了线性自抗扰控制器,通过仿真验证该控制系统能够减小阵风对天线造成的扰动,达到提高天线跟踪精度的目的。
1 基于PID控制的伺服系统及其优缺点
1.1 三环控制系统简介
深空探测天线伺服驱动系统采用直流电机驱动,分方位、俯仰2条驱动支路。伺服系统采用典型的电流环、速度环、位置环控制,各环节的控制方法采用经典PID控制。系统的结构框图如图1所示。
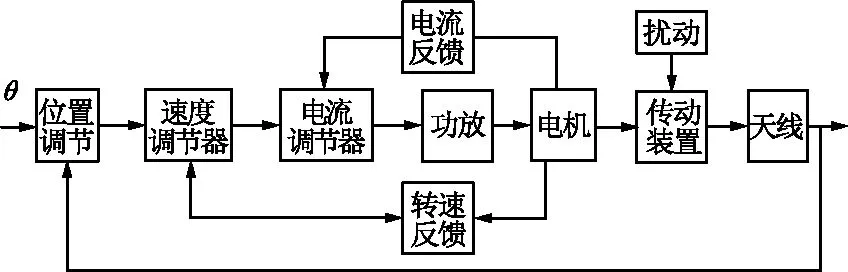
图1 伺服系统三环控制Fig.1 Servo system three-loop control
经典PID控制的基本思想是基于误差来生成消除误差的控制策略,即用误差的过去、现在和变化趋势的加权和来得到控制策略。
PID控制使用方便,不依赖于被控对象的数学模型,其控制原理为:利用负反馈获得系统输出与期望目标的误差信号e,将e的比例(P)、积分(I)、微分(D)的线性组合构成控制量u,对被控对象进行控制:
(1)
式中,Kp为比例增益;KI为积分增益;KD为微分增益。PID控制系统原理如图2所示。
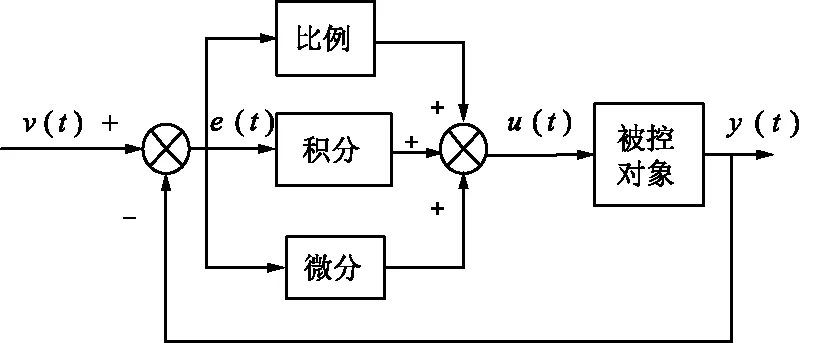
图2 PID控制系统原理Fig.2 Schematic diagram of the PID control system
1.2 PID控制优缺点
PID控制原理是基于误差来生成消除误差控制策略:用误差的过去、现在和变化趋势的加权和消除误差。
优点:
靠控制目标与实际行为之间的误差来确定消除此误差的控制策略,而不是靠被控对象的“输入—输出”关系,即不靠被控对象的“输入—输出”模型来决定控制策略,简单易行,只要选择PID增益使闭环稳定,就能使对象达到静态指标。
缺陷:
① 采用PID校正系统闭环动态品质对PID增益的变化太敏感,当被控对象处于变化的环境中时,根据环境的变化经常需要变动PID的增益。
② “基于误差反馈消除误差”是PID控制技术的精髓,但实际情况中直接取目标与实际行为之间的误差常常会使初始控制力太大而使系统行为出现超调,而这正是导致使用PID控制技术的闭环系统产生“快速性”和“超调”不可调和矛盾的主要原因。
③ PID是用误差的比例、积分、微分的加权和形式来形成反馈控制量的,然而在很多场合下,由于没有合适的微分器,通常采用PI控制规律,限制了PID的控制能力。
④ PID是用误差的过去、现在和将来的适当组合来产生程制量的。经典PID一般采用线性取和方法,但是实际系统多为非线性系统,所以非线性控制器更适合实际情况。
⑤ PID中的误差积分反馈对抑制常值扰动确实有效,但在无扰动作用时,误差积分反馈常使闭环的动态特性变差,而对于随时变化的扰动来说,积分反馈的抑制作用能力又不是很显著。
2 线性自抗扰控制技术及其参数的整定方法
2.1 自抗扰控制技术简介
ADRC是针对同时具有内部和外部不确定性的非线性不确定系统的控制问题而提出的,其核心思想是将系统的内部不确定性(定常或时变,线性或非线性)和外部不确定性(外部扰动)一起作为“总扰动”,通过构造“扩张状态观测器”对“总扰动”进行估计并实时补偿,以期获得较强的控制不确定的能力以及较好的控制精度。
自抗扰控制结构一般由跟踪微分器(TD)、扩张状态观测器(ESO)、非线性状态误差反馈控制律(NLSEF)三部分组成。TD的作用是安排过渡过程并提取其微分信号,减小了系统的初始误差,解决了系统响应快速性和超调性之间的矛盾;ESO的作用是估计系统状态和内外扰动的实时作用量,将含未知干扰的非线性不确定性对象化为积分串联型对象进行控制;NLSEF利用安排的过渡过程及其微分信号与状态估计之间的误差的非线性组合和对ESO得到的扰动值的补偿来生成控制信号[4-6]。n阶自抗扰控制器的结构如图3所示。
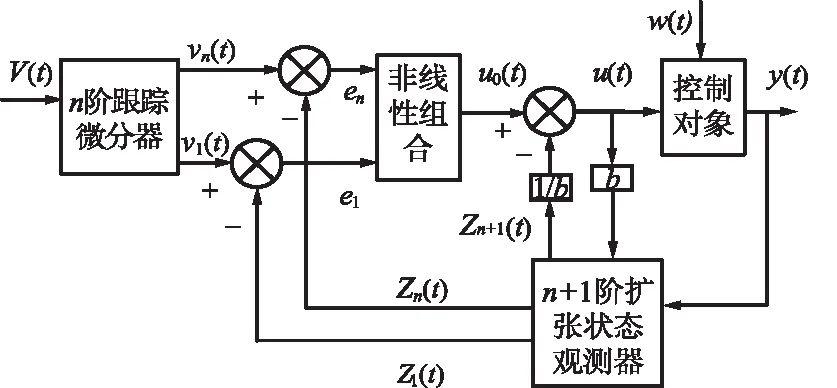
图3 n阶自抗扰控制器结构框图Fig.3 Block diagram of n-order active disturbance rejection controller structure
2.2二阶线性自抗扰控制系统数学模型
虽然ADRC技术在许多实际应用中显示出了独特的优越性,但由于非线性函数较多,使得计算量很大,对系统硬件的计算能力提出了更高要求,增加了实时控制难度;另外,控制器中非线性函数参数多,又没有特定的调整方法,使得参数调整过程复杂,目前还没有系统的整定方法,限制了其在实际工程中的应用。为此提出了LADRC技术,利用参数化来整定系统参数,即通过设定状态观测器的带宽参数实现简易参数的整定,使扩张状态观测器的可调参数数量由原来的多个降至单一参数,且物理意义明确,易于整定,而这些使LADRC 将成为新型实用数字控制技术[7-8]。下面以二阶非线性系统为例,说明LADRC原理。
一般可将二阶系统表示为:
(2)
式中,f(t,x1,x2,w)为系统中包括内扰和外扰在内的不确定因素,比如摩擦、量测噪声、传感器噪声、齿隙以及系统对象的动态特性。式(2)可写成:
(3)

(4)
式中,
则式(4)的线性扩张状态观测器(LESO)可写为:

(5)

为考证ESO的观测效果同β1,β2,β3的关系,令式(4)减去式(5),可得误差方程:
(6)
式中,ei=xi-zi,i=1,2,3;
若h为有界量,那么只要选取矩阵L使得Ae稳定(系统的能观性可以保证这样的L存在),就有ei→0,则ESO就会得到很好的观测效果。
由于观测器可以对系统不确定因素观测,于是选择控制器为:
(7)

u0=kp(r-z1)-kdz2,
(8)
由式(6)、式(7)和式(8)所表示的LESO可组成主动抗扰的线性自抗扰控制器,其控制原理如图4所示。
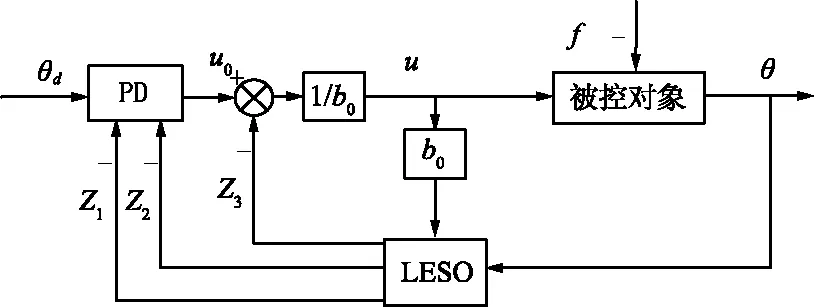
图4 LADRC控制原理Fig.4 Schematic diagram of LADRC control
2.3 二阶线性自抗扰控制系统参数整定方法
LADRC是将ADRC线性化,并将ADRC调参问题简化为带宽调参问题,只需调节控制器带宽ωc、观测器带宽ω0以及b0这3个参数即可获得较满意的动态性能。其中,ωc决定了控制器的响应速度,在一定范围内其越大控制效果越好,但过大有可能使系统不稳定,需要根据瞬态响应要求(如调整时间要求)确定,且一般应被限定在可以得到过程变量精确测量值的频率范围内;ω0决定了ESO的跟踪速度,观测器带宽越大,ESO估计扰动也越快,但观测器带宽过大可能导致噪声难以忍受或ESO振荡,故其取值也取决于可接受的噪声阈值或者使观测器状态产生振荡采样延时;b0代表了对象的特性,可以由阶跃响应中的初始加速度导出。对于常见的大部分工程对象,ω0与ωc可按ω0=(3~5)ωc的关系选择[9-10]。
3 深空探测天线LADRC仿真3.1 伺服系统天线的风干扰分析
在风的时程曲线中,包含两部分:① 长周期部分,周期在10 min以上;② 短周期部分,周期通常只有几秒。根据上述两部分,实际上把风分为平均风(即稳定风)和脉动风(即阵风)两部分来分析。考虑到平均风的长周期远大于一般天线结构的周期,因此这部分风虽然本质是动力的,但其作用与静力作用相近,可按静力作用来分析。脉动风是由风的不规则引起的,其强度是随时间按随机变化的。它的周期较短,按动力作用来分析。
风吹向圆抛物面天线的情形如图5所示,在二维体轴座标系内,风载荷有3个分量:
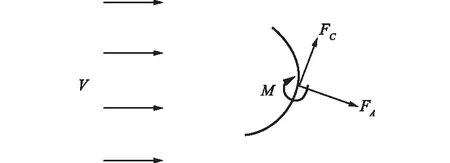
图5 圆抛物面的风载荷Fig.5 Wind load of circular paraboloid FC=CCqA,
(9)
FA=CAqA,
(10)
M=CMqAD,
(11)
以18 m天线为例,CA取最大值0.43,取风速为8级风平均风速20.7 m/s,q=0.5ρv2=0.5×1.225×20.72=262.45 kg/ms2,天线直径D=18 m,天线面积A=π(0.5D)2=3.141 592 6×(0.5×18)2=254.47 m2,则方位风力矩为M=CAqAD=0.43×262.45×254.47×18=516 920.94 N·m。若方位减速比为440,方位为4个电机,则每个电机的负载力矩为516 920.94÷4÷440=293.71 N·m。
3.2 控制对象建模
深空探测设备伺服系统位置环由控制计算机及其相关软件实现,速度环和电流环由相应的硬件采用模拟体制组成,难以进行大的更改,因此,只能对位置环进行相应的算法改进。
首先必须对双电机驱动伺服系统进行简化,简化的原则是系统的实质结构不能简化,而优化性能的某些环节可以简化,并且要保证简化前后系统的性能要尽量接近,如稳定性、快速性和跟踪性能。具体的简化如下:
① 去掉滤波环节,包括电流滤波、速度滤波和给定滤波;
② 针对系统近似不可控的情况,对多电机驱动的天线进行结构和动力学分析和建模时可只考虑一台电机进行驱动,把天线结构刚度假定完全集中在一个齿轮箱上,将天线的转动惯量看成集中惯量,而负载的转动惯量为总的转动惯量的一半,此时电机的各项参数不变[12],如图6所示。
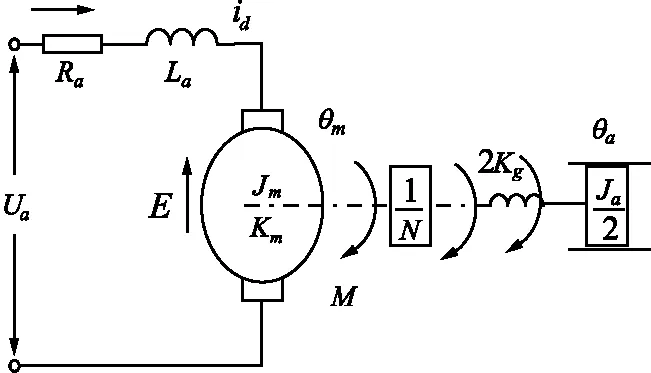
图6 简化后的双马达驱动模型Fig.6 Model of the simplified double-motor drive
根据电动机的工作原理,设定电机在额定励磁下运行,可得如下微分方程组[13-14]:
(12)
则系统控制对象方框图如图7所示。
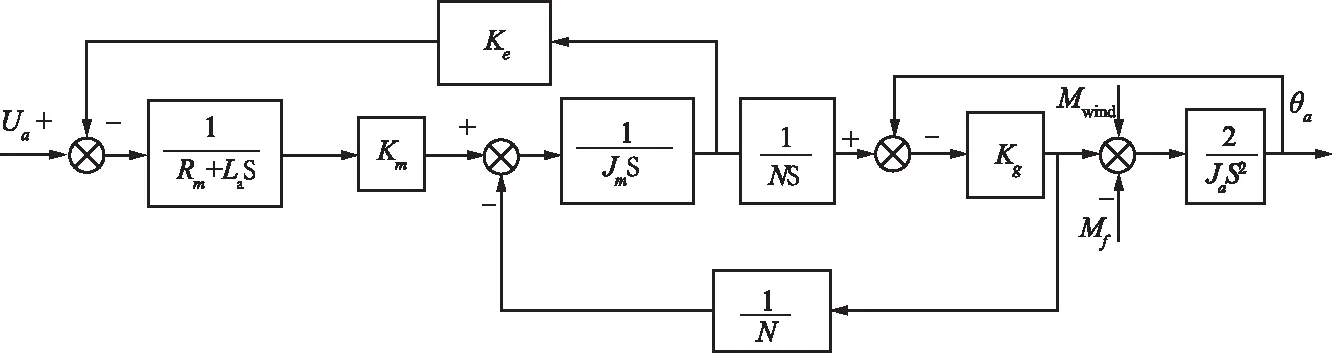
图7 控制对象方框图Fig.7 Block diagram of controlled member
(13)
由图1可得,速度环控制对象一部分为电机电流到电机转速的传递函数,另一部分为电流环闭环传递函数,因为电流环带宽比速度环高得多,电流环可等效为一个小惯量环节,表示为:
(14)
根据速度环的设计指标带入相关数据,并等效得到速度环等效闭环传递函数为:
(15)
3.3 自抗扰控制器设计
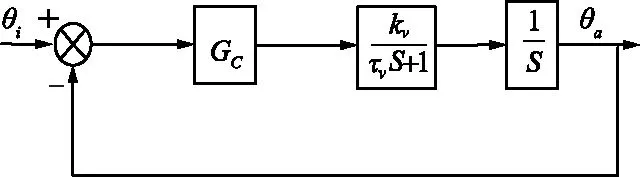
图8 自跟踪环控制结构框图Fig.8 Block diagram of auto-tracking loop control structure
速度环闭环增益kv=24.8,速度环等效时间常数τv=0.08S,GC为所设计的控制器,所以模型中被控对象传递函数为:
(16)
(17)
(18)

(19)

3.4 自抗扰控制器仿真
在仿真中,加入周期为1 Hz,折算到电机输出轴最大力矩为300 N·m的脉动风力矩。为了验证基于LADRC方法在深空探测伺服系统中的控制效果,用Matlab-Simulink对其在阶跃信号输入下进行仿真,在系统输出信号加入0.1%的白噪声,采样时间为1 ms;LADRC参数ω0=35,ωc=ω0/3,ξ=1,仿真结构图如图9所示。同时,给出了在同样扰动条件下,PID控制仿真结构图[16],如图10所示。
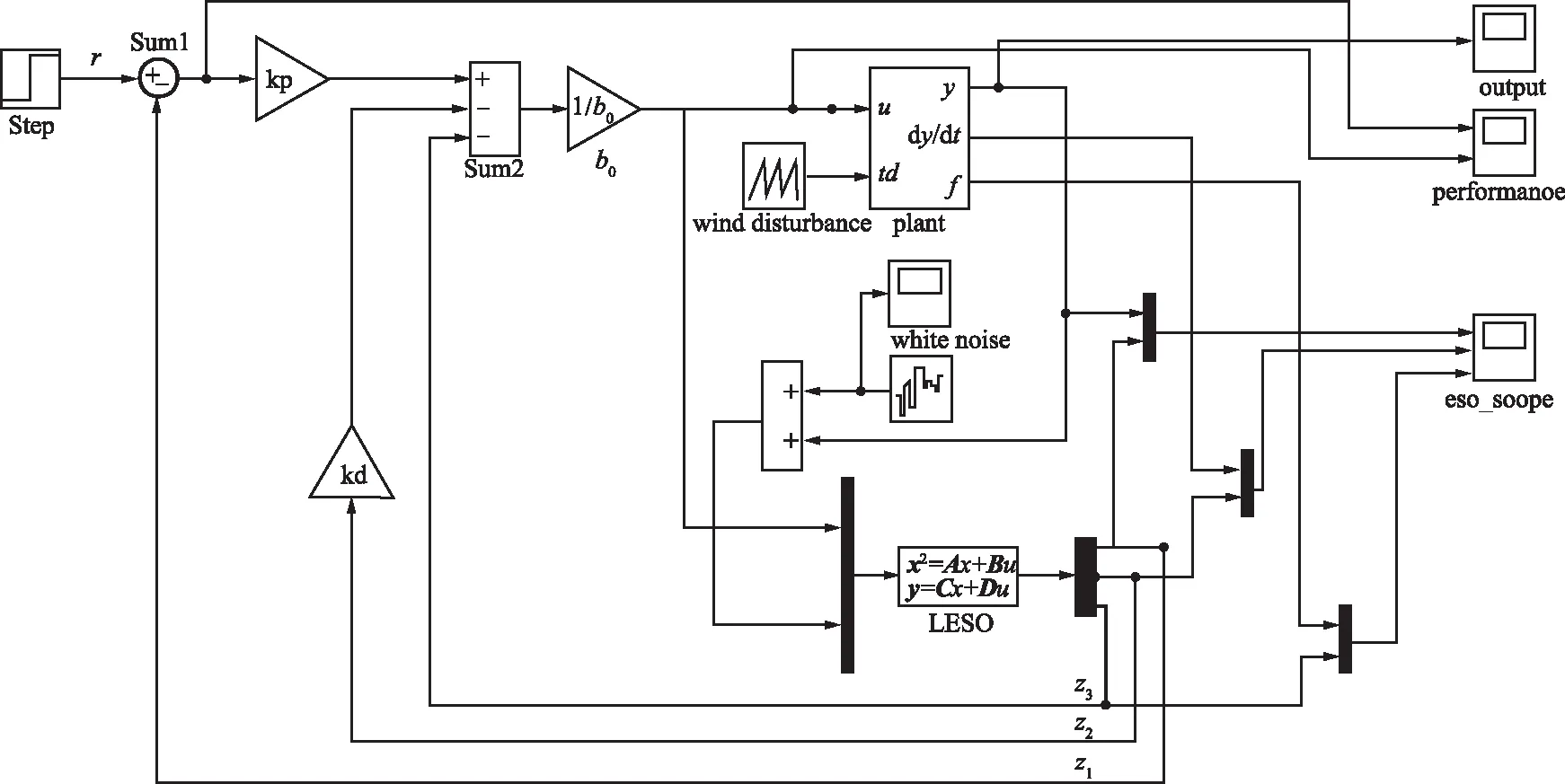
图9 LADRC控制仿真结构图Fig.9 Structure diagram of LADRC control simulation
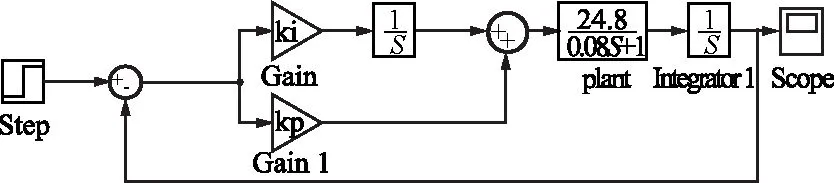
图10 PID控制仿真结构图Fig.10 Structure diagram of PID control simulation
在阶跃响应输入下,得到仿真结果如图11、图12和图13所示。
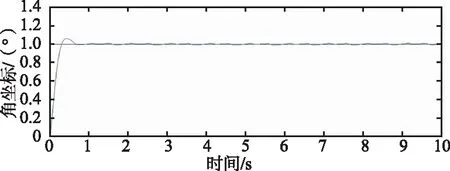
图11 LADRC控制下的阶跃响应曲线Fig.11 Curve of the step response under control LADRC
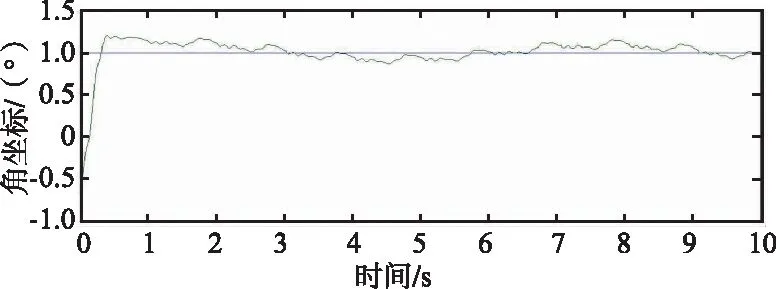
图12 PID控制下的阶跃响应曲线Fig.12 Curve of the step response under PID control
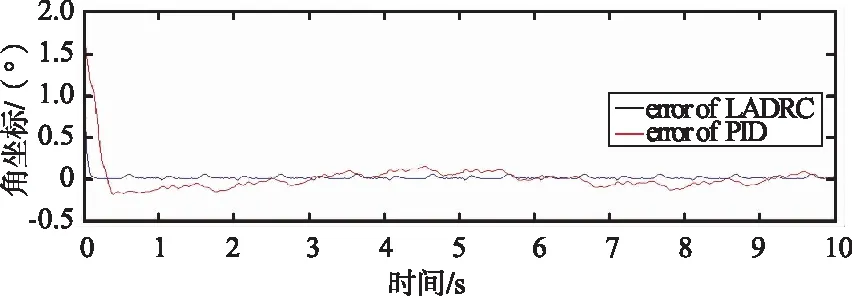
图13 LADRC与PID控制下阶跃响应误差对比曲线Fig.13 Curves of the error comparisons between the step responses under LADRC and PID control
仿真结果表明,由于LADRC能实时估计出风扰动的变化并进行实时补偿,使得LADRC控制下系统抗风扰能力较传统的PID控制方法大大提高,几乎不受扰动的影响,阶跃响应的上升时间为160 ms,超调量为12%,且在很短的时间内进入稳态值,几乎没有稳态误差。表明系统对外界扰动具有良好的鲁棒性和适应性。LADRC方案反应速度快、参数调整简单,只调节一个参数就能获得良好的控制性能,同时能够将系统中影响输出的所有扰动都抵消。
4 结束语
本文提出在深空探测设备伺服系统位置环采用线性自抗扰控制,从Matlab仿真结果看,该方法对比PID控制,其抗风扰能力显著增强,实现了对阵风扰动较好的抑制性能。采用线性自抗扰控制的伺服系统具备良好的抗扰特性,这为深空探测系统提高跟踪精度提供了新的方法,具有很强的现实意义。
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2022年6期)2022-07-02
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
数学物理学报(2019年4期)2019-10-10
北京航空航天大学学报(2017年6期)2017-11-23
制造技术与机床(2017年3期)2017-06-23
北京航空航天大学学报(2016年4期)2016-02-27
