基于模糊控制理论的温室茶树灌溉控制策略研究
2021-06-18 00:35马德新
陕西农业科学 2021年5期
韩 沙,马德新
(青岛农业大学 动漫与传媒学院,山东 青岛 266109)
引言
茶树在生长期间,灌溉体系的制定具有十分关键的作用,在最近几年中物联网等方面的技术呈直线式发展,将其应用于灌溉技术中,可以使最后所呈现出来的效果更佳。茶树在生长期间,需要通过科学的手段对其进行灌溉,以此来促进其茁壮成长,在该过程中茶树需要吸收大量水分,因此相关人员应该对此提高重视,借助物联网技术的优势,并将其应用于农业领域中,从而确保灌溉工作能够顺利实施。水分是茶树发育生长至关重要的因素之一,土壤含水量直接影响茶树根系和叶片,水分的不足和过多,都会影响茶树的生育[1]。如果出现水分不足的现象,则会导致茶树生长缓慢,并对发芽率产生较大的消极影响。把模糊控制技术应用于农业领域中,能够在一定程度上提高相关资源的合理分配率,这样不但可以提升生产率,同时还可以降低资源耗费,从而实现精准灌溉以及做出逻辑决策及决策预测,使农业生产更加智能化。
1 模糊控制理论原理
模糊控制是在规则的基础上所制定的,在设置期间可以省去构建模型这一环节,所以其原理十分易于理解。模糊控制体系在鲁棒性方面具有一定的优势,能够在较大程度上弱化干扰,特别是应用于非线性等系统中时,所呈现出来的效果同预期相符。模糊控制装置是在相关理论的基础上制定的,通过模仿人类的思想,对以往的操作经验进行总结,在此基础上形成多种类型的控制规则,同时使用计算机来予以实现。模糊控制是在非线性的基础上所制定的数学模型,所获得的数据具有较高的可信度,并且鲁棒性效果较好,在时变和滞后体系中所呈现出来的效果同预期相符[2]。
2 温室茶树水肥一体化灌溉模糊控制器设计
2.1 技术路线
通过查阅相关资料,并到实地进行考查,针对有关于茶树灌溉的相关影响因素进行归纳整理,在此基础上发现土壤湿度、降雨量、空气湿度等因素所起到的作用较为显著。因为植物在成长过程中需要大量的水资源,因此土壤含水量的大小具有十分关键的作用,这也就意味着我们能够通过该指标的具体数值对植物需水情况进行推测。
温度、湿度、光照情况以及土壤含水量等指标都会对茶树成长产生较为显著的影响,其中后者的作用最为显著。在现实灌溉期间,一般情况下需要按照土壤含水率的实际情况来判断植物是否缺水。此次研究中,令土壤最优含水量与实际含水量之间的差别为E,误差变化率为Ec,在此基础上展开研究,并设置流程图,详细情况可以参考图1。

图1 模糊控制流程
茶树在各个生长阶段中所需要的水分也会存在差异,出于对这方面的考虑,在此次研究工作中,首先掌握了茶树的成长时间段,之后设需水量为U,再结合E以及Ec这两个指标进行模糊化处理,在此基础上制定灌溉方案。模糊控制结构图如图2所示。

图2 模糊控制结构
2.2 模糊化处理
2.2.1 模糊量确定 在针对偏差E进行模糊处理的过程中,首先挑选出NB、NM、NS、ZO、PS、PM、PB这几个模糊量,其中NB属于负大,表示土壤处于极度缺水状态,NM为负中,表示中度缺水状态,NS为负小,表示微量缺水状态;ZO为零,表示实测值与最佳值的差值为零;PS为正小,表示实测值略大于最佳值,水分处于微量超出状态,PM为正中,表示实测值大于最佳值,水分处于中度超出状态,PB为正大,表示实测值严重大于最佳值,水分处于严重超出状态。模糊控制规则如表1所示。
偏差E的论域是[-6,6],误差变化率Ec的论域是[-6,6],通过对当前仅有的文献进行查阅,我们能够了解到可以左右灌溉时间的因素涵盖土壤湿度、气候等因素,需水量U的论域选择是[-6,6]。将E转化成离散论域,则有量化因子QE,对于论域中的元素来说,则有相对应的离散论域元素Ei:
Ei=QE*((X)-0)=-X
(1)
由上式可得,E的离散论域为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6],在此基础上我们通过推理能够得出,Ec以及U所对应的离散论域元素分别为[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]、[-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6]。与该模糊控制装置相关的输入以及输出变量都具有线性性质,并且这两方面各自所对应的最大隶属度函数均仅有一个[3],详细情况可以参考下图3、图4、图5:

图3 E所对应的隶属度函数

图4 Ec所对应的隶属度函数

图5 U所对应的隶属度函数
按照偏差E的实际变化情况可以划分成7个级别,在此基础上可以得到对应的模糊控制量,详细情况可以参考表1。

表1 输入变量E的模糊控制
在此基础上,通过推理我们能够得到变化率Ec所对应的模糊控制量,详细情况可以参考表2。

表2 输入变量Ec的模糊控制
2.2.2 模糊规则的设计 通过查阅相关文献,设置出下列规则:
(1)若E负大,Ec负大,则U为负大;
(2)若E正大,Ec正大,则U为正大;
(3)若E负小,Ec负小,则U为0。
上述规则用IF A THEN B形式来描述和解释:
(1)IF E=NB and Ec=NB THEN U=NB,偏差E负大(NB),Ec负大(NB),则充分表明反馈值所对应的超调量相对较大,并且该现象较为显著,所以需要尽量压低控制量,简单来讲就是令增量U呈现出负大状态(NB)。
(2)IF E=PB and EC=PB THEN U=PB。偏差E正大(PB),则充分表明被控量波动较大,并且EC为正大(PB),代表该现象较为显著,所以需要在短时间内提升控制量,简单来讲就是令增量U呈现出正大状态(PB)。
(3)IF E=NS and EC=PS THEN U=ZO。偏差E为负小(NS),EC为正小(PS),则充分表明反馈值超过设定值的范围并不大,同时二者之间的差距正在逐渐减小,所以在短时间内可以令控制量保持稳定,简单来讲就是令增量U值等于0。
在上述内容的基础上,所得到的详细数据可以参考表3。

表3 模糊规则控制
2.2.3 反模糊化 模糊控制器装置的输出量呈现为一个集合的形式,可以借助反模糊化途径找到可行度较高的量[4],该方法有很多种形式,通过对此次研究的实际情况进行综合考虑,最终决定使用重心法。所得到的二维输入输出关系模糊控制图可以参考图6。
3 仿真及实验验证
3.1 茶树水肥一体化灌溉二维模糊控制系统仿真


图7 茶树模糊控制系统二维simulink仿真模型
3.2 实验验证
此次研究最开始是在2019年9月在青岛农业大学开展,研究区域的具体地址为东经121°33′,北纬36°20′,其高为55.20 m。由于地理环境的影响,该地区气候相对较为特殊,并且温差较为显著,降水量丰富,气候偏向于湿润,高达70%。此次所培养的茶树品种为崂山绿茶,一共有2 000株,为了确保其能够具有较高的成活率,还修建了大棚。通过检测我们能够发现,该地区土壤偏向于酸性,其中涵盖大量有机物,且营养丰富,同时还具有配套的浇灌系统。此外,为了能够对大棚中的各项指标进行实时管理,还在其中安装了体积较小的气象站,只需要通过电脑等便可以实现监督,方便用户读出。在此次研究中,主要选择茶树在成长阶段的信息展开研究,具体时间为2019年9月1-20日每日9:00-17:00。并且为了降低操作人员的工作压力,设置该系统每隔1 min便自动对相关指标进行收集并保存。
为了验证茶树模糊控制器的有效性,将温室大棚分为A、B两个试验区,两区各1 000株茶树。该实验为单因素控制实验,可变因素只有是否应用模糊控制器进行灌溉,在A区不进行灌溉,只需要用传感器监控土壤含水率,B区借助该系统对茶树的需水情况进行检测,在发现水量不足的情况下自动进行灌溉。通过研究我们能够发现,茶树在阳光充足的时候需水量较大,此时土壤含水程度相对偏低,2019年9月12日阳光甚好,9:00-17:00A、B试验田各时间段的数据如表4和表5所示。

表4 2019年9月12日(晴)9:00-17:00A区各时间段的数据

表5 2019年9月12日(晴)9:00-17:00B区各时间段的数据
从这些数据可以得出,两区日土壤含水率日变化数据都有从高到低再到高的趋势,是由于在光照变化的过程中,土壤含水率也呈现出较大的差异。但A区中变化趋势明显,B区变化较小,模糊控制智能灌溉系统及时调整了茶树所需水的多少,使该试验田的土壤含水率维持了相对稳定的状态A、B两区在2019年9月1-20日的土壤含水情况可以参考表6。
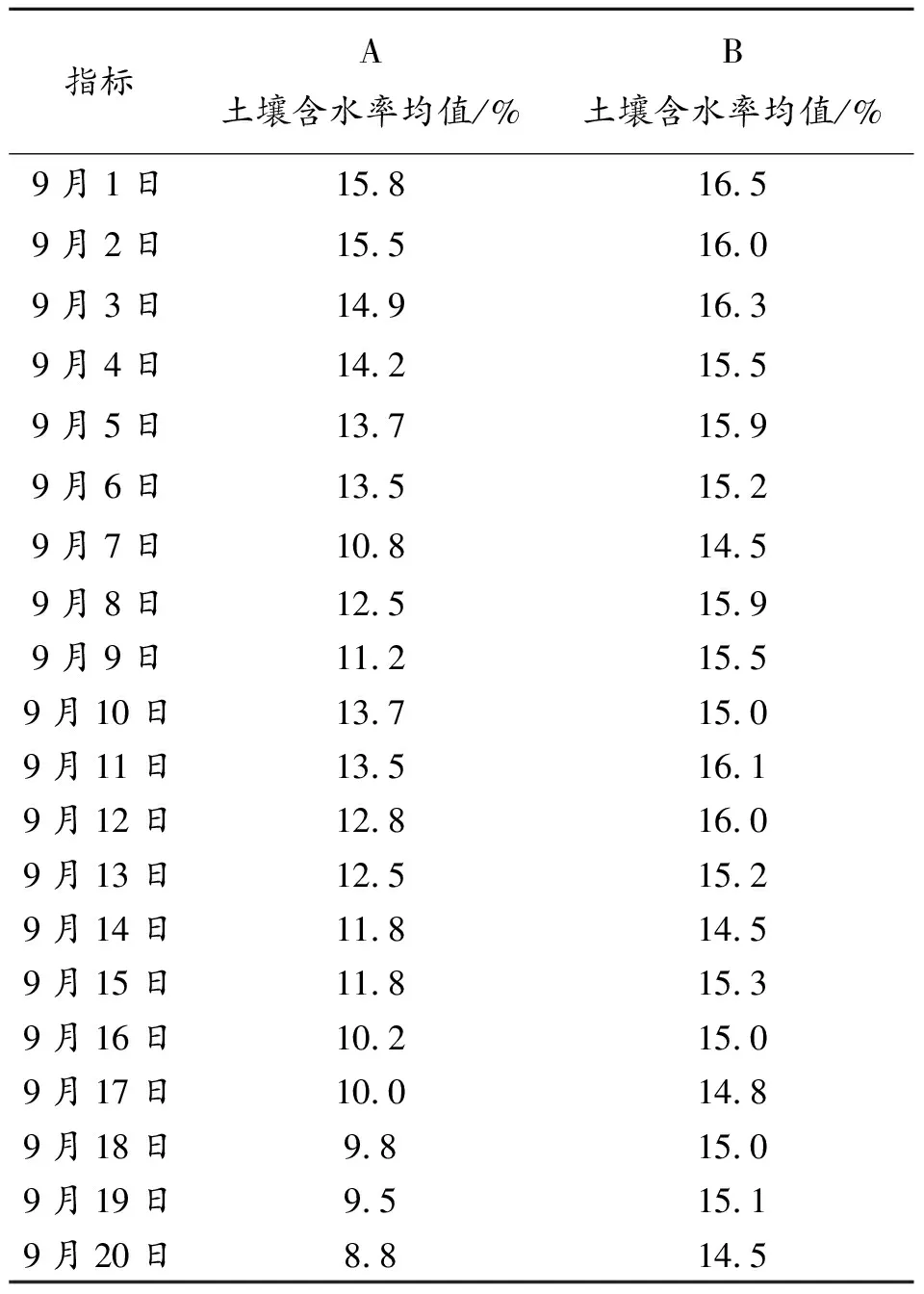
表6 2019年9月1-20日9:00-17:00A、B两区土壤含水率均值数据
从表6可以得出,模糊控制系统的使用使茶树的土壤含水率保持稳定,维持了茶树生长所需最佳土壤含水率15%左右,模糊控制装置所呈现出来的调节作用同预期相符。
4 结语和展望
模糊控制装置是在大量前人研究的基础上所研制的,其主要通过模拟人类的思维,对以往的操作经验进行总结,在此基础上形成多种类型的控制规则,同时使用计算机来予以实现[5]。此外,规则库数据的精准度直接决定了最后的效果,如果规则数量偏少,则控制效果不理想,但是数量过多,则会增加计算量。笔者所设计的茶树灌溉模糊控制器在小规模试验田中的运行状态良好,其稳定性和调节准确性在下一步的工作中还有待于提高和优化。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
中南林业科技大学学报(2022年7期)2022-09-26
汽车实用技术(2022年15期)2022-08-19
计算机仿真(2022年2期)2022-03-15
汽车实用技术(2022年3期)2022-02-23
农业科技与信息(2021年24期)2022-01-05
计算机应用与软件(2021年3期)2021-03-16
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
计算机与数字工程(2019年8期)2019-09-03