基于TLS数据的杨树削度方程建立及材积估算
2021-07-28 03:52花伟成田佳榕孙心雨徐雁南
南京林业大学学报(自然科学版) 2021年4期
花伟成,田佳榕,孙心雨,徐雁南
(南京林业大学,南方现代林业协同创新中心,南京林业大学林学院,江苏 南京 210037)
削度方程是表示树干上各部位的直径为该干径位置距地面高、全树高以及胸径的数学函数[1],削度方程大致可以分为简单削度方程、分段削度方程、可变参数削度方程3种类型。在欧美国家,削度方程已经逐渐取代材积表和材积方程,广泛用于树干材积的估算[2-3]。
三维激光扫描技术,通过大量密集的三维点坐标记录被测物表面信息。地基激光雷达(terrestrical laser scanner, TLS)作为一种新兴的精密仪器,能够提供高精度的林木点云数据,可以精细地获取林木冠层以下的垂直结构信息[4-5]。目前,地基激光扫描技术在我国林业上的应用主要集中在基本测树因子获取和单木三维重建两个方面[6-7],而利用地基技术进行树木削度方程的研究较少[8-9]。建立削度方程往往使用解析木法来获取方程所需数据[10-11],通过对立木进行伐倒,将树干区分成若干段测量直径,这一过程不仅投入大量的人力、物力和财力,还对树木造成永久性破坏,不利于森林资源的保护,而在一些保护林区也无法获得解析木数据。地基激光扫描技术可以通过三维点云数据对调查区域进行三维重构,从而获取植被参数,使林业调查对环境的影响降到最低,也为削度方程建模数据的获取提供新的思路与方法。受到地基激光雷达点云数据获取以及树木枝叶遮挡的影响,不同高度位置处单木主干表面点云数量有较大差异。主干表面点云数量的多少对树干直径提取的精度存在较大影响。目前,利用地基点云数据进行削度模型的构建,大多使用1~6 m处的主干点云[9,12]或者整株主干点云数据[8],使用1~6 m处的主干点云数据,浪费了大量的点云信息;使用整株主干点云数据,受到上部直径提取精度的影响,削度模型构建精度会有所下降。
本研究选取江苏省东台市黄海海滨国家森林公园内大面积人工种植的杨树(Populusspp.)人工林为研究对象,利用地基激光扫描技术进行削度模型数据的获取,通过MATLAB 2020a软件进行点云数据建模处理,合理利用单木主干点云信息进行杨树削度模型构建并估算立木材积,验证了利用地基激光雷达建立树木削度模型的可行性与可靠性,为林业资源调查和管理提供一定的数据支持和技术参考。
1 材料与方法
1.1 研究地概况及数据采集
研究区位于江苏省东台市的黄海海滨国家森林公园(120°47′~120°56′E,32°48′~32°53′N),属北亚热带季风气候区,季风显著,四季分明,年平均气温15.0 ℃,无霜期220 d,降水量1 061.2 mm,日照2 130.5 h,属苏北海洋堆积平原。公园内地势平坦,总面积达4 500 hm2,森林覆盖率80%以上。
于2019年10月,选择杨树树叶大部分已经脱落、天气状况为无风或者微风的时候开展调查。选择公园内的4块地势平坦、垂直结构良好的杨树林地进行数据采集,主要包括样地的实地调查和地基激光雷达数据的获取。4块林分内均设置一个20 m × 20 m的方形样地,样地的四角设置控制标靶。实地调查时,对胸径大于5 cm的样木进行编号,测量并记录胸径、冠幅、树高等内容。
TLS数据采集设备为Riegl VZ-400i地面三维激光扫描仪,其有效测量速度42 000点/s,水平扫描角度为360°,垂直扫描角度为100°(+60°/-40°),激光波长为近红外,测量精度为5 mm,激光发散度为0.35 m/rad。三维激光扫描仪使用High Speed模式进行数据采集,角分辨率设置为0.05°,扫描站点共架设5站,分别设置在样地中心以及四周,样地设置、标靶和测站位置见示意图1,图中测站为测站预设位置,实际操作时测站位置的确定以尽量减少树木之间的遮挡效应,放置在预设位置1 m范围内,方便更好地获取数据。样地的基本信息和样地点云密度见表1。
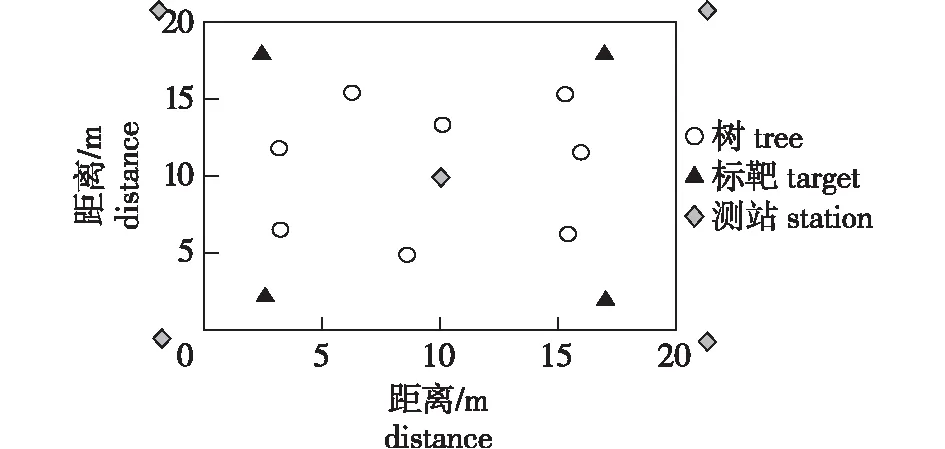
图1 样地设置及标靶和测站位置示意图
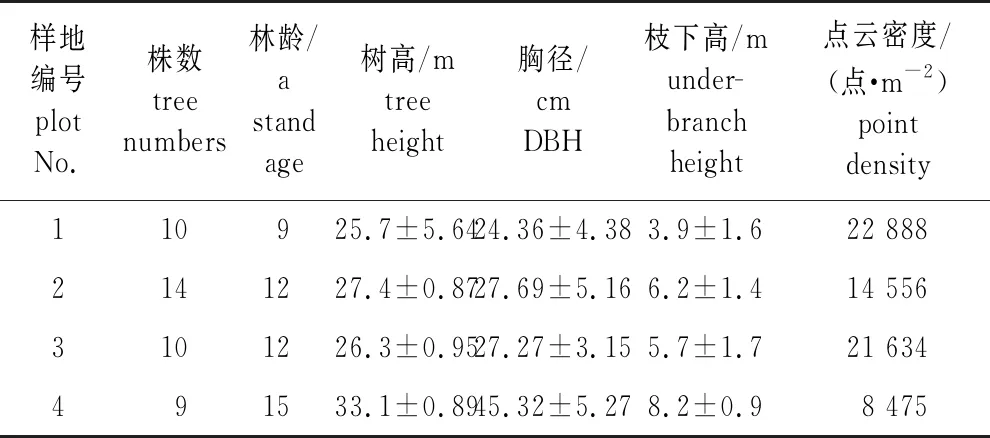
表1 样地基本信息
1.2 TLS数据的预处理
预处理包括配准、裁剪、去噪、地面点滤波和归一化处理。该流程使用Riegl VZ-400i设备配套的Riscan Pro软件进行5站点云数据拼接,通过人工选取控制标靶进行数据的粗拼接,然后利用ICP(interative closet point)算法进行自动精确拼接。使用LiDAR360软件(https://www.lidar360.com/)进行裁剪、去噪、地面点滤波和归一化处理。通过裁剪,将样地点云从拼接数据中提取出来;去噪主要是对数据采集过程中由于多种因素影响产生的噪声进行去除;地面点滤波的目的是从地基激光雷达点云数据中分离出地面点;归一化处理可去除地形起伏对点云数据高程的影响。
1.3 主干点云的提取
对于归一化处理后的样地点云数据,进一步进行单木分割以获得单木点云,使用MATLAB 2020a进行点云数据的建模处理,从单木点云中提取树木主干点云。整块样地的点云处理流程见图2。
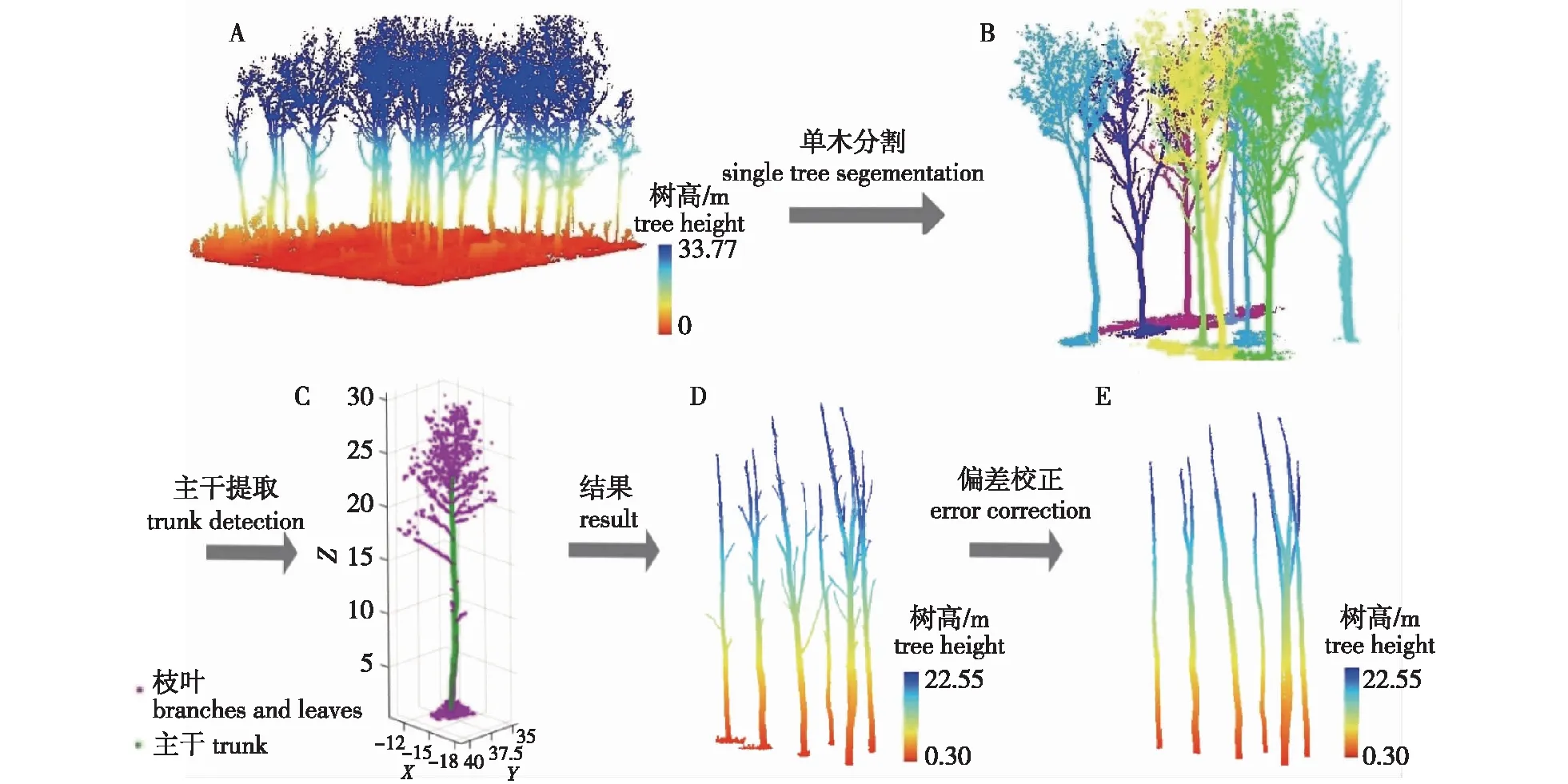
图2 主干点云提取流程图
1)单木分割。 通过地基激光雷达点云数据建立杨树树干削度方程,该过程与树干解析建立削度方程类似,需获取树木胸径及不同高度处的直径,作为削度方程建模的初始数据。因此对于整块样地数据,首先需要进行单木分割,提取出单木的点云数据,并与实际调查树木一一对应。由于地基激光雷达点云通常是在冠层以下获取的,能够清晰地识别树干,可利用这一特点进行单木分割[13]。样地内树木高度较高,树高均大于20 m,样地林下存在着灌木和藤本植物,因此设定树高阈值为4 m,只有高度大于4 m的植被点参与单木分割。
2)主干点云提取。 提取得到的单木点云数据主要包括主干点云、分支点云和叶片点云,获取树干不同高度位置的直径仅仅需要主干点云,分支点云和叶片点云的存在会导致难以自动提取树干直径,也会影响直径的提取精度[14],故需要进行主干点云的提取。另外,由于削度方程的建立需要建模样木主干通直,不存在病腐,可根据提取的主干点云数据对不满足建模要求的样木予以剔除。树木主干通常是一个竖直的圆柱体表面,因此可以利用点云中每个点的平坦度(F)和法向量进行主干点云的提取[15-17]。选取单木点云Pi周围N-1个最临近点,共N个点进行主成分分析,计算得到这N个点的特征值,利用特征值进行平坦度的计算,计算方法为:
F=1-λ0/(λ0+λ1+λ2)。
(1)
式中:λ0、λ1、λ2为点Pi的特征值,且λ0<λ1<λ2,其中,点Pi=(xi,yi,zi)T为单木点云。
根据公式可知,平坦度越大,N个点就越可能在一个平面上,点Pi越可能是主干点云。但是对于平坦度很大的点云,还可能位于分支等其他平面上,因此还需要计算这N个点所构成平面的法向量,如果法向量沿着水平方向,就说明这N个点所在的平面是垂直的,即如果法向量与XY平面的夹角越小,点Pi越可能是主干上的点。利用MATLAB 2020a软件进行点云数据的建模处理,计算点云平坦度和法向量,选取N=8、平坦度大于0.85、法向量与XY平面夹角小于15°进行主干点云的提取,对提取得到的点云通过距离阈值进行分组,如果一个点到某个分组中任意一点的距离小于0.1 m,则该点会分配到组内,识别点云数量大于100的组并融合形成主干点云[18]。对主干点云进行偏差校正,去除主干干扰点(图2D,2E)。
1.4 直径的拟合
沿着树木的生长方向,在树干胸径位置和每隔0.5 m处对主干点云进行切片,切片厚度为10 cm;使用最小二乘法进行圆拟合提取直径,若测径部分有节瘤或者畸形,则提取该测径位置上下0.25 m处直径并取平均值。为了充分利用树木主干点云信息,保证直径提取的精度[19],若测径部分的切片点云数小于100,则放弃该位置的直径提取。
1.5 削度方程的建立
考虑到杨树树种干形通直且林分条件相对简单的生长特性,选取Munro、Kozak、Schumacher and Hall、Ormerod 4种简单削度方程[20-23]和曾伟生、严若海两种可变参数削度方程[24-25]作为备选模型,使用切片提取的不同高度处直径、胸径和实测树高数据,进行树干削度方程的建立,主要包括以下两个过程:①根据单木主干提取结果,从4块样地中挑选出32株主干点云较完整的杨树,将32株杨树按约80%和20%的比例随机分组,组成建模样本和旁置样本,分别进行削度方程拟合和模型检验;②根据模型检验结果挑选出较优模型,为了充分利用样木信息,减小模型的预估误差,再利用 32株杨树进行削度模型的建立,作为模型的最终结果。根据MATLAB R2020a软件自带的Fit nonlinear regression model(fitnlm)函数进行备选模型的拟合。
选择决定系数(R2)、均方根误差[RMSE,记为σ(RMSE)]、相对百分误差[MAPE,记为σ(MAPE)]和平均预估误差[MPE,记为σ(MPE)]4个指标用于模型拟合程度的度量,指标公式如下:
(2)
(3)
(4)
(5)

1.6 立木材积计算
利用实测树高和胸径数据,根据南方型杨树立木二元材积方程[26]计算样方内杨树的材积;之后根据TLS点云数据建立削度方程,得到树干上部不同树高位置的直径,采取中央断面区分求积法进行立木材积的估算。比较材积方程与削度方程估算材积的差异,并进行差异显著性检验。中央断面区分求积公式如下:
(6)
式中:V为样方内杨树材积;gi为第i区分段中央断面积;l为区分段长度;g′为梢头底端断面积;l′为梢头长度;n为区分段个数。
2 结果与分析
2.1 胸径的TLS提取值与实测值比较
根据单木主干点云提取结果,选择32株主干点云较完整的杨树进行削度方程建立。所选杨树的胸径最小值为17.3 cm,最大值为50.6 cm,平均胸径为32.3 cm,标准偏差为8.48 cm。TLS点云数据提取的胸径结果与实地测量值十分接近,提取得到的杨树胸径最小值为17.6 cm,最大值为51.3 cm,平均胸径为32.2 cm。将胸径实地测量值和TLS提取值绘制散点图(图3),胸径提取值和实地测量值两者的回归系数为1.004 7,R2为0.989 6,RMSE为0.89 cm。
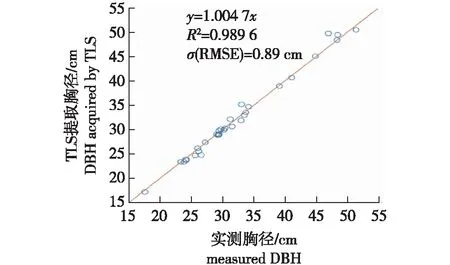
图3 胸径TLS提取值与实测值比较
2.2 削度方程的构建结果
依据建模样本中26棵杨树主干点云切片提取的不同高度处直径数据,进行削度模型的构建。利用MATLAB R2020a软件的fitnlm函数进行备选模型的拟合,各模型拟合统计量见表2。根据拟合统计量的定义可知,RMSE值越小,R2值越大,MAPE越小且MPE越接近0值,说明模型拟合效果越好。Kozak、Schumacher and Hall、Ormerod和曾伟生模型的拟合效果接近,R2均大于0.979,RMSE值均小于1.00 cm,MAPE均小于3%,MPE均小于0.32%,这4个模型拟合结果较好,精度较高;而Munro和严若海模型拟合效果较差,R2均小于0.860,RMSE值均大于2.50 cm,MAPE大于7.8%,MPE大于0.80%。利用旁置样本对模型进行独立检验,检验结果见表2。从表2可以看出,所有模型的检验结果与建模数据的分析结果一致,Munro和严若海模型检验结果较差,而Kozak、Schumacher and Hall、Ormerod和曾伟生模型检验结果较好,R2均大于0.987,RMSE值均小于1.15 cm,MAPE均小于2.2%,MPE均小于0.60%,说明这4个模型的预测效果较优,具有较强的适用性。
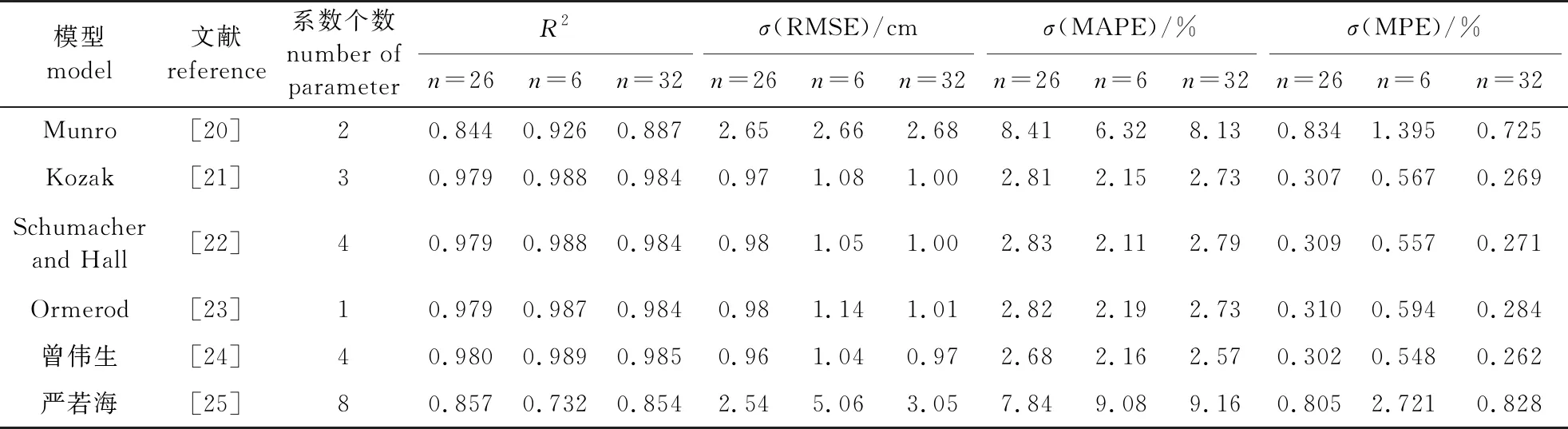
表2 模型拟合统计结果
为了充分利用样木信息,减小模型的预估误差,最终将6棵旁置样本纳入建模样本进行Kozak、Schumacher and Hall、Ormerod和曾伟生模型的建立,模型拟合统计量见表2。根据表2可知,最终建立的Kozak、Schumacher and Hall、Ormerod和曾伟生模型R2均大于0.984,RMSE值在1.00 cm左右,MAPE小于3%,MPE小于0.30%。根据这4个模型的建模结果,绘制了单木(胸径29.7 cm,树高27.1 m)TLS提取的树干上部直径和模型拟合直径关系图,见图4。
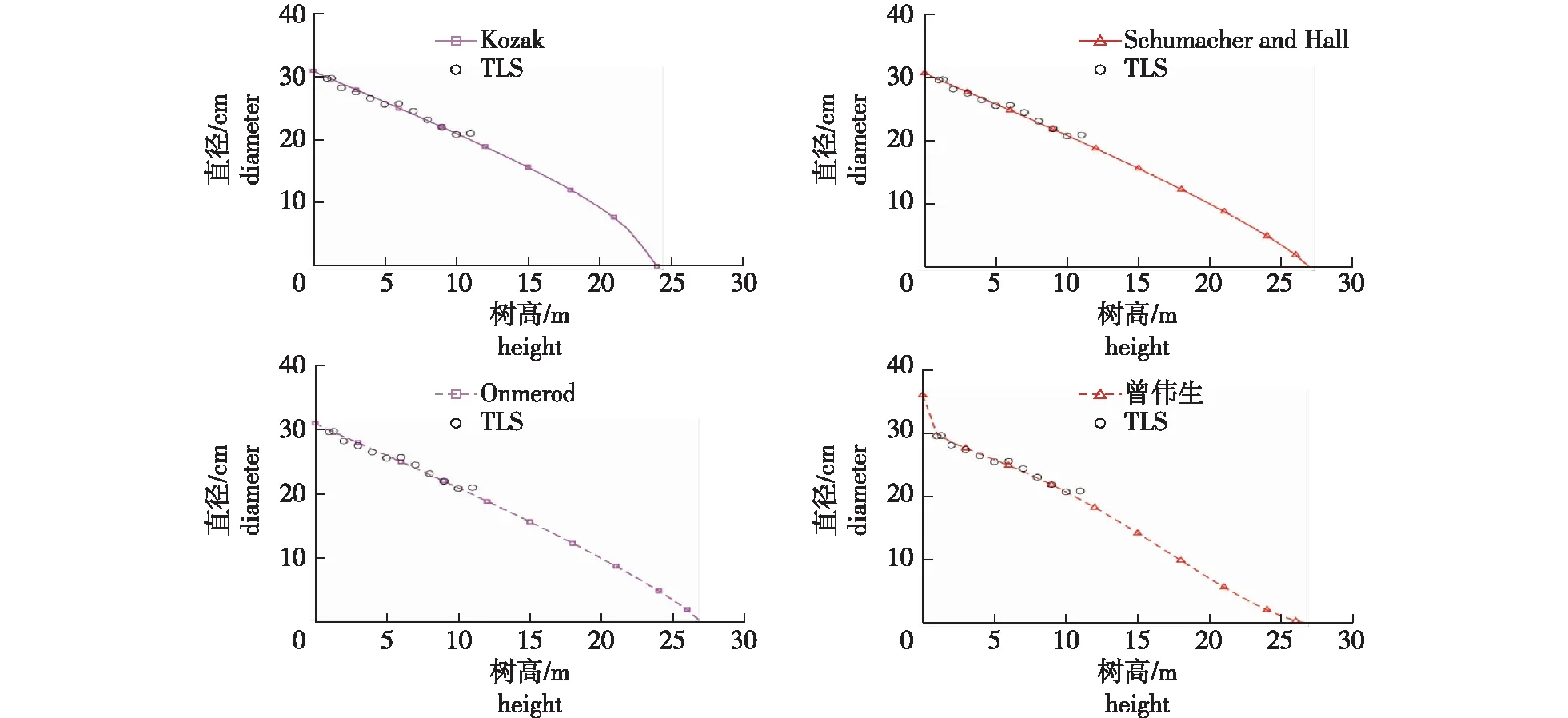
图4 单木削度方程拟合结果
从图4明显可以看出,Kozak模型不符合杨树生长特性,在树干上部25 m处计算得到的树干直径出现0值,此时距离树木顶端还有一定距离,大于25 m部分树干直径甚至出现负值;Schumacher and Hall、Ormerod和曾伟生模型拟合结果大体符合树木的生长规律,仅在树木根部和树干梢头位置存在区别。因此,最终得出Schumacher and Hall、Ormerod和曾伟生模型整体拟合效果较好,且具有较强的适用性。
2.3 材积估算
根据备选削度方程的拟合结果,选择Schumacher and Hall、Ormerod和曾伟生模型进行材积估算[22-24]。利用中央断面积区分求积的方法,分别计算得到32棵杨树的材积。为了比较模型估算与材积方程计算的材积之间差异,计算了相对差异。结果显示,Schumacher and Hall、Ormerod和曾伟生模型的相对差异分别为3.34%、3.71%和7.30%。方差分析结果表明,3个模型估算材积与材积方程计算材积之间均无显著差异(P>0.10)。
根据相对差异大小与方差分析结果,最终确定Schumacher and Hall模型为该地区杨树最优削度模型,模型拟合结果为:
d2=0.519D1.941(H-h)1.653/H1.456。
式中:D为胸高带皮直径,m;d为在树干h高度处的带皮直径,m;H为全树高,m;h为从地面起算的高度,m。
3 讨 论

目前,利用树木削度方程编制单木材积表,往往需要样木按照树高或者胸径变量进行配置,理想的建模样本结构应该为样木从小径阶到大径阶均匀分布,每个径阶的样木按树高分级也均匀分布。本研究样本数量较少,因此难以达到材积编表的要求,但削度方程的拟合和验证结果显示,Schumacher and Hall、Kozak、Ormerod和曾伟生模型拟合结果较好,预测精度较高,模型具有一定的适用性。Schumacher and Hall、Ormerod和曾伟生模型符合杨树的实际生长情况,而Kozak模型在杨树尚未达到顶端的位置出现了直径为0 cm的情况,这与杨树的实际生长情况明显不符。利用Schumacher and Hall、Ormerod和曾伟生模型进行材积估算,经与材积方程计算的材积比较,发现Schumacher and Hall模型计算的材积与材积方程计算的材积相对差异(3.34%)最小,且两者之间没有显著差异(P>0.10),模型的决定系数R2=0.984,均方根误差为1.00 cm,相对百分误差为2.79%,平均预估误差为0.271%。说明所建立的削度方程的可靠性较高,可以用于该地区杨树活立木材积的估算。综上所述,最终确定Schumacher and Hall模型为该地区杨树削度方程最优拟合模型。
为了充分合理地利用点云数据,本研究中削度模型构建所用的数据为主干切片点云数目大于100位置处的主干点云。因为树木主干上部的点云数量很少,难以达到直径拟合的要求,为了保证建立的削度模型具有较高精度,将这部分数据予以剔除,故用于削度方程构建的直径缺少主干上部的数据,这可能是Kozak削度方程拟合结果与实际不符的主要原因,且对于利用该削度方程计算树木上部直径、编制材种出材率表的可行性有着较大影响。多源数据融合能很好地解决数据缺失问题,因此通过无人机或者机载激光雷达来补充上部枝干的点云数据,使削度方程能够准确预测树木上部直径,达到编制材种出材率表的要求,是今后探讨的方向。另外,有研究显示地基激光雷达提取的树高误差最大达3.06 m[30],难以满足削度方程建立的要求,故本研究建立树干削度方程时使用的树高数据为实测数据,而目前使用无人机数据或者机载激光雷达数据提取树高的研究较多,且精度较高[31-34],是否可以使用无人机或者机载激光雷达提取立木树高数据进行削度方程的构建还有待更多的研究。
4 结 论
本研究利用地基激光雷达点云数据进行了样地内杨树的单木分割,使用MATLAB 2020a软件进行点云数据建模处理,计算了点云平坦度和法向量用于主干点云的提取,利用圆拟合的方法提取了立木主干不同高度位置处的直径,构建削度方程并进行立木材积的估算。最终根据点云数据反演得到的Schumacher and Hall削度方程模型d2=0.519D1.941(H-h)1.653/H1.456为江苏省东台市的黄海海滨国家森林公园内杨树人工林的最优树干削度方程。利用该削度方程可以进行活立木材积的估测,估测精度较高,可以满足实际生产调查的需要。本研究在地基激光雷达数据处理、林业资源调查、林分材积估测、材积方程的建立等方面具有很好的应用价值。
参考文献(reference):
[1]孟宪宇.测树学[M].3版.北京:中国林业出版社,2006:159-170.MENG X Y.Forest mensutation[M].3rd ed. Beijing:China Forestry Publishing House,2006:159-170.
[2]庞丽峰,贾宏炎,陆元昌,等.分段削度方程2种估计方法比较[J].林业科学,2015,51(12):141-148.PANG L F,JIA H Y,LU Y C,et al.Comparison of two parameters estimation methods for segmented taper equations[J].Sci Silvae Sin,2015,51(12):141-148.
[4]田佳榕,代婷婷,徐雁南,等.基于地基激光雷达的采矿废弃地生态修复的植被参数提取[J].生态与农村环境学报,2018,34(8):686-691.TIAN J R,DAI T T,XU Y N,et al.Extraction of vegetation parameters in different stages of ecological restoration on abandoned mine area based on T-LiDAR[J].J Ecol Rural Environ,2018,34(8):686-691.DOI:10.11934/j.issn.1673-4831.2018.08.003.
[5]庞勇,李增元,陈尔学,等.激光雷达技术及其在林业上的应用[J].林业科学,2005,41(3):129-136.PANG Y,LI Z Y,CHEN E X,et al.Lidar remote sensing technology and its application in forestry[J].Sci Silvae Sin,2005,41(3):129-136.DOI:10.3321/j.issn:1001-7488.2005.03.022.
[6]晏颖杰,范少辉,官凤英.地基激光雷达技术在森林调查中的应用研究进展[J].世界林业研究,2018,31(4):42-47.YAN Y J,FAN S H,GUAN F Y.Research progress in TLS technology in forest investigation[J].World For Res,2018,31(4):42-47.DOI:10.13348/j.cnki.sjlyyj.2018.0055.y.
[7]刘鲁霞,庞勇,李增元,等.用地基激光雷达提取单木结构参数:以白皮松为例[J].遥感学报,2014,18(2):365-377.LIU L X,PANG Y,LI Z Y,et al.Retrieving structural parameters of individual tree through terrestrial laser scanning data[J].J Remote Sens,2014,18(2):365-377.DOI:10.11834/jrs.20143091.
[8]SUN Y,LIANG X L,LIANG Z Y,et al.Deriving merchantable volume in poplar through a localized tapering function from non-destructive terrestrial laser scanning[J].Forests,2016,7(12):87.DOI:10.3390/f7040087.
[9]杨玉泽,张珊珊,林文树.依据地面三维激光扫描及点云数据建立的白桦树干削度方程[J].东北林业大学学报,2018,46(12):58-63.YANG Y Z,ZHANG S S,LIN W S.Stem taper function ofBetulaplatyphyllawith terrestrial 3D laser scanning[J].J Northeast For Univ,2018,46(12):58-63.DOI:10.13759/j.cnki.dlxb.2018.12.011.
[10]梅光义,孙玉军.国内外削度方程研究进展[J].世界林业研究,2015,28(4):44-49.MEI G Y,SUN Y J.Research progress in stem taper equation[J].World For Res,2015,28(4):44-49.DOI:10.13348/j.cnki.sjlyyj.2015.04.006.
[11]王鹏程,庄尔奇,涂炳坤,等.湖北省马尾松人工林削度方程及材种出材率表的研究[J].华中农业大学学报,2001,20(1):67-72.WANG P C,ZHUANG E Q,TU B K,et al.A study on the taper function and merchantable volume yielding rate table of mason pine in Hubei Province[J].J Huazhong Agric,2001,20(1):67-72.DOI:10.13300/j.cnki.hnlkxb.2001.01.017.
[12]梁子瑜,孙圆,梁欣廉,等.基于地面激光扫描仪的树干削度方程提取[J]. 南京林业大学学报(自然科学版),2014,38(5):6-10. LIANG Z Y, SUN Y, LIANG X L, et al. The extraction of stem taper equation based on terrestrial laser scanning[J]. J Nanjing For Univ (Nat Sci Ed), 2014, 38(5): 6-10. DOI:10.3969/j.issn.1000-2006.2014.05.002.
[13]TAO S L,WU F F,GUO Q H,et al.Segmenting tree crowns from terrestrial and mobile LiDAR data by exploring ecological theories[J].ISPRS J Photogramm Remote Sens,2015,110:66-76.DOI:10.1016/j.isprsjprs.2015.10.007.
[14]PUESCHEL P,NEWNHAM G,ROCK G,et al.The influence of scan mode and circle fitting on tree stem detection,stem diameter and volume extraction from terrestrial laser scans[J].ISPRS J Photogramm Remote Sens,2013,77:44-56.DOI:10.1016/j.isprsjprs.2012.12.001.
[15]VERMA V,KUMAR R,HSU S.3D building detection and modeling from aerial LIDAR data[C]//2006 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’06).June 17-22,2006,New York,NY,USA.IEEE,2006:2213-2220.DOI:10.1109/CVPR.2006.12.
[17]RAUMONEN P,KAASALAINEN M,ÅKERBLOM M,et al.Fast automatic precision tree models from terrestrial laser scanner data[J].Remote Sens,2013,5(2):491-520.DOI:10.3390/rs5020491.
[18]LIANG X L,LITKEY P,HYYPPA J,et al.Automatic stem mapping using single-scan terrestrial laser scanning[J].IEEE Trans Geosci Remote Sens,2012,50(2):661-670.DOI:10.1109/TGRS.2011.2161613.
[20]KOZAK A,MUNRO D D,SMITH J H G.Taper functions and their application in forest inventory[J].For Chron,1969,45(4):278-283.DOI:10.5558/tfc45278-4.
[21]KOZAK A,SMITH J H G.Critical analysis of multivariate techniques for estimating tree taper suggests that simpler methods are best[J].For Chron,1966,42(4):458-463.DOI:10.5558/tfc42458-4.
[22]SCHUMACHER F X, HALL F D S. Logarithmic expression of timber-tree volume[J]. Journal of Agricultural Research, 1933, 47(9):719-734.
[23]ORMEROD D W.A simple Bole model[J].For Chron,1973,49(3):136-138.DOI:10.5558/tfc49136-3.
[24]曾伟生,廖志云.削度方程的研究[J].林业科学,1997,33(2):32-37.ZENG W S,LIAO Z Y.A study on taper equation[J].Sci Silvae Sin,1997,33(2):32-37.
[25]严若海,吴富桢.商品材积变型估测系统的研究[J].南京林业大学学报,1992,16(3):31-37.YAN R H,WU F Z.A study on the variable merchantable volume estimation system[J].J Nanjing For Univ,1992,16(3):31-37.
[26]肖君.南方型杨树人工林生长与收获模型的研究[D].南京:南京林业大学,2006.XIAO J.Studies on the growth and yield models of poplar plantations in southern area[D].Nanjing:Nanjing Forestry University,2006.
[27]WAN P,WANG T J,ZHANG W M,et al.Quantification of occlusions influencing the tree stem curve retrieving from single-scan terrestrial laser scanning data[J].For Ecosyst,2019,6(1):1-13.DOI:10.1186/s40663-019-0203-1.

[30]骆钰波,黄洪宇,唐丽玉,等.基于地面激光雷达点云数据的森林树高、胸径自动提取与三维重建[J].遥感技术与应用,2019,34(2):243-252.LUO Y B,HUANG H Y,TANG L Y,et al.Tree height and diameter extraction with 3D reconstruction in a forest based on TLS[J].Remote Sens Technol Appl,2019,34(2):243-252.
[31]张煜星,王雪军,刘明博.基于无人机遥感影像的DSM及遥感数据林分平均高提取[J].林业资源管理,2017(2):23-27,52.ZHANG Y X,WANG X J,LIU M B.Extraction of DSM and mean forest stand height from UAV imagery[J].For Resour Manag,2017(2):23-27,52.DOI:10.13466/j.cnki.lyzygl.2017.02.005.
[32]杨坤,赵艳玲,张建勇,等.利用无人机高分辨率影像进行树木高度提取[J].北京林业大学学报,2017,39(8):17-23.YANG K,ZHAO Y L,ZHANG J Y,et al.Tree height extraction using high-resolution imagery acquired from an unmanned aerial vehicle (UAV)[J].J Beijing For Univ,2017,39(8):17-23.DOI:10.13332/j.1000-1522.20160428.
[33]张良,姜晓琦,周薇薇,等.大光斑激光雷达数据的森林冠层高度反演[J].测绘科学,2018,43(3):148-153,160.ZHANG L,JIANG X Q,ZHOU W W,et al.Retrieval of forest canopy height based on large-footprint LiDAR data[J].Sci Surv Mapp,2018,43(3):148-153,160.DOI:10.16251/j.cnki.1009-2307.2018.03.025.
[34]刘方舟,刘浩,云挺. 基于分水岭优化思想的单木信息分割算法[J]. 林业工程学报,2020,5(5):109-116. LIU F Z, LIU H, YUN T. Individual tree crown separation using the improved watershed method[J]. J For Eng, 2020, 5(5): 109-116. DOI:10.13360/j.issn.2096-1359.202001021.
猜你喜欢
北京测绘(2022年5期)2022-11-22
农业工程学报(2022年14期)2022-10-19
地理空间信息(2021年10期)2021-11-14
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
遥感信息(2019年1期)2019-03-22
电子制作(2018年16期)2018-09-26
森林工程(2018年5期)2018-05-14
西南农业学报(2016年6期)2016-04-16
武夷学院学报(2015年3期)2015-07-18