基于FPGA的双通道旋转变压器测角系统设计
2021-08-10 03:57甘戈熊伟吴洋刘占才刘景岩朱双双
大气与环境光学学报 2021年4期
甘戈,熊伟,吴洋,刘占才,刘景岩,朱双双
(1中国科学院合肥物质科学研究院安徽光学精密机械研究所,中国科学院通用光学定标与表征技术重点实验室,安徽 合肥 230031;2中国科学技术大学,安徽 合肥 230036)
0 引言
随着载荷探测技术的不断进步和对大气环境日益迫切的探测需求,近年来我国发射了越来越多的星载成像仪器。而对于星载成像系统这类闭环精密系统的扫描机构而言,为了控制扫描机构的推扫位置及速度、加速度等参数,通常把角度值作为一个重要参量,需要实时获得其精确的反馈值,之后通过简单的数学运算就可以获得扫描执行机构的速度以及加速度等信息,有利于构建完整的闭环控制系统。航空航天应用上对扫描机构有着较高的速度精度及定位精度等控制要求[1],因此,选用高测量精度的传感器作为整个系统的角度测量元件并对其测角技术进行研究有着十分重要的工程价值。
在科研领域及日常生产制造活动中,通常采用角度传感器来检测待测物体的角度位置。其基本工作机制是按照不同的电子学转换原理将角位移转换成电信号,并通过数据接口对外输出。常用角度传感器有光电编码器、感应同步器、旋转变压器三种[2]。旋转变压器的定、转子的机械结构相对来说比较独立,因此其结构件的抗冲击性比光电编码器及感应同步器更好,没有特别薄弱的环节,能够适应军工武器、航空航天过载以及冲击大、工作温度变化范围广的恶劣环境要求,从而被广泛应用于上述领域[3]。
以中国科学院安徽光学精密机械研究所研制的大气主要温室气体监测仪(GMI)为例[4]。GMI载荷采用旋转变压器(下文简称为旋变)作为角度传感器并使用单片机控制电机启停工作,转速为每分钟5转,将旋变数据解算为16位使用。本课题出于对上述角度传感器性能和适用范围的综合考虑,最终选用旋变作为测角系统的角度测量元件加以研究。卫星载荷的实际项目中要求测角系统的测量精度在±30′′以内,本设计以现场可编程逻辑门阵列(FPGA)作为主控芯片,并使用中电二十一所研制的J75XFSW002型无刷双通道旋变作为系统的角度测量元件,同时采用AD2S1210高精度解码芯片作为解码芯片[5]设计了一个可用于实际工程的测角系统,具有一定创新性和实用性。
1 旋转变压器角度传感原理简介
旋转变压器的工作原理是通过电磁感应将待测轴的角位移量转化为电信号,因此从本质上可以将其视为一种特殊类型的旋转电机。在航空航天等高精度应用领域上一般选择双通道旋变作为扫描机构的角度传感器。双通道旋变分为粗、精两路通道分别进行不同角度范围的测量[6]。粗、精机大多采用共磁路或机械组合的方式,单对极旋转变压器作为粗机,进行大角度范围内的测量,而精度更高的多对极作为精机进行小角度范围内的测量。
如图1所示,当励磁绕组端输入的激励电压为U=Umsin ωt时,在粗机、精机输出绕组上得到的感应电压分别为
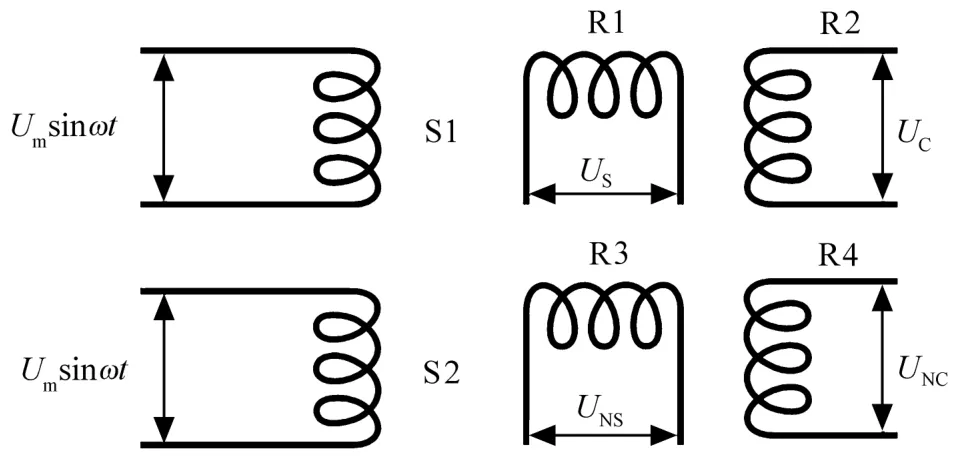
图1 双通道多对极旋转变压器原理图Fig.1 Schematic diagram of the two-channel multi-pole rotary transformer


式中:K为旋转变压器的电压比,Us为粗机正弦输出绕组电压,Uc为粗机余弦输出绕组电压,UNS为精机正弦输出绕组电压,UNC为精机余弦输出绕组电压,N为精粗机的极对数比,θc为粗机测得的转子转动角度粗值,θj为精机测得的转子转动角度精值。通过后续电子学系统将二者解码,并按照一定的方式组合即可得到高精度的待测轴角。
2 旋转变压器测角系统设计
2.1 整体方案设计
经过分析,测角系统电子学硬件电路需要具备的功能有以下几点:
1)接受上位机指令驱动电机转动,控制电机转动方向;
2)接受上位机指令驱动绝对式编码器采集电机角位移量;
3)接受上位机指令驱动双通道多对极旋变采集电机转动的的角位移量,并将其输出的与待测轴角成正余弦关系的模拟信号转换为计算机系统可以读取的数字量并对其进行处理;
4)将最终得到的角度值送回上位机;
5)为上述功能模块提供电源。
角度测量系统的整体方案是采用步进电机作为系统的转动部件并将旋变固定在电机转动轴上随步进电机同步旋转,将电机转动角度值作为系统的输出量。同时,为了验证所设计的角度测量系统的精度,采用与电机和旋转变压器同轴安装的精度更高的编码器作为基准。
如图2所示,采用FPGA作为角度测量系统的核心控制单元,上位机发送电机启动和角度采集命令后,FPGA控制电机启动旋转,同时开始驱动绝对式光电编码器与旋转变压器同步测量电机轴角位移量,并通过FPGA进行处理后送回上位机显示。
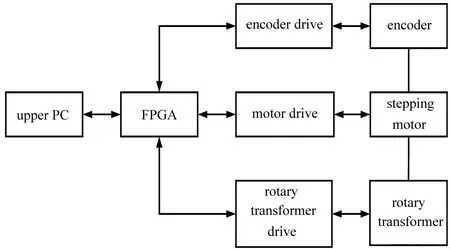
图2 整体方案示意图Fig.2 Schematic diagram of the overall plan
2.2 机械结构方案
由于采用绝对式光电编码器和双通道旋转变压器同步采集电机旋转角度的方式来验证测角系统的精度,因此需要保证三者的本身安装精度足够高,以保证后续电子学系统的引入误差较小,而不会影响后续测试对测角系统的精度结果的误判。
因此绘制了角度测量系统的三维模型和二维机械结构图纸并通过加工和测量来验证装调精度。如图3所示,海德汉绝对式光电编码器通过编码器座安装在支架结构件上,编码器轴通过转轴结构件与同样安装在支架上的旋转变压器转子相连,步进电机通过带动联轴器使得支架上方的旋变及编码器跟着其一起转动。整个机械结构主要靠加工和检测来控制结构件配合面的同轴度及垂直度,尽量减小编码器、旋变和电机的安装机械误差对电路系统的影响。
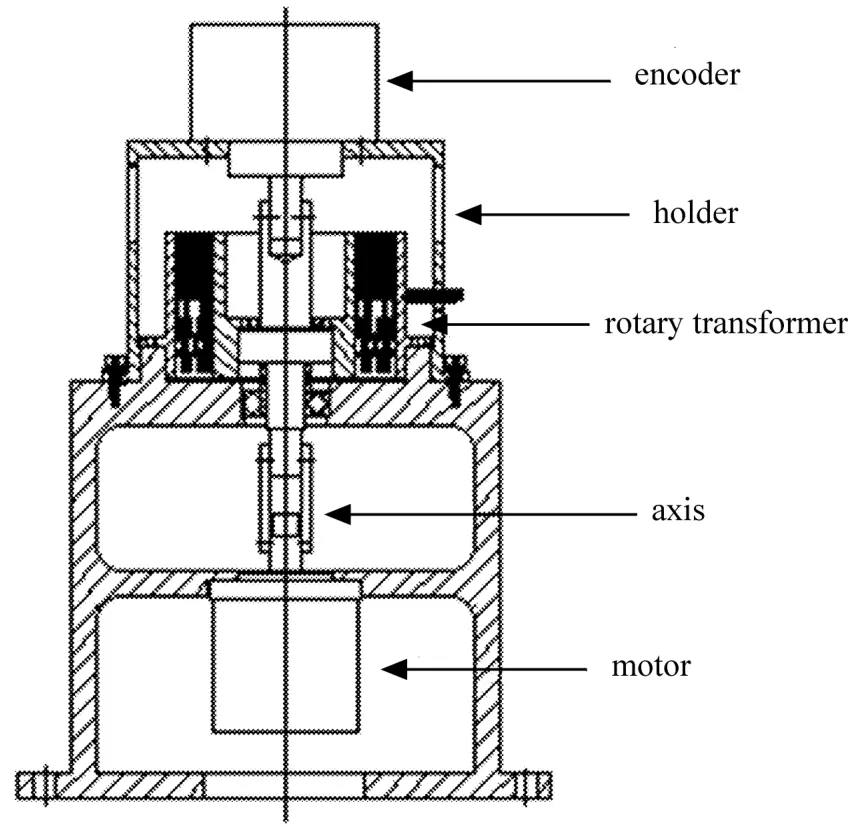
图3 系统机械结构图Fig.3 Schematic of mechanical structure of the system
2.3 硬件电路方案
针对系统功能设计了硬件电路,整个双通道多对极旋变系统的详细硬件电路框图如图4所示。电源模块根据系统其他模块的负载及供电特性将外部输入电压进行转换并分流到各自的区域;FPGA通过485收发芯片来控制光电编码器,并接受其返回的EnDat格式角度数字值;步进电机由FPGA主控逻辑程序发送脉冲并通过专用芯片控制其运动;RDC芯片通过FPGA配置工作模式及分辨率后,直接输出差分励磁信号并经过信号调理模块进行处理后再送入双通道旋变激励绕组;旋变精粗机正余弦信号经调理电路,调理至RDC芯片可处理的范围,并经其解算得出角度数字值,送至FPGA进行组合纠错,最终得到的角度值数字量通过串口传送至上位机。整个硬件电路设计的难点主要在于信号调理及RDC芯片的配置及使用。因为旋变及RDC额定输入输出电压并不一致,需要综合考虑电压匹配及驱动功率放大等因素。RDC芯片的配置及使用需要严格按照芯片手册上的时序进行,同时采用两片RDC芯片进行解码需要考虑时钟同步及解码同步的问题,避免解算出错。
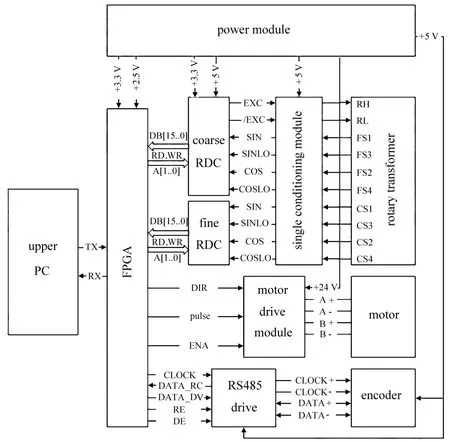
图4 硬件电路方案设计图Fig.4 Schematic of hardware circuit
2.4 系统软件方案
旋转变压器测角系统软件设计主要包括FPGA主控程序设计(图5)以及精、粗机旋变数字转换器数据的组合纠错算法设计。主控程序的主要功能是控制电机启停,并通过控制双通道旋转变压器以及绝对式编码器的时序信号,来驱动旋变和编码器进行角度数据处理,并最终将其角度值数字量送回上位机。精、粗机旋变数字转换器数据的组合纠错算法设计主要是为了消除双通道旋转变压器精、粗通道之间过零点不一致导致读数结果有误的问题[7,8]。

图5 FPGA主控程序模块图Fig.5 Schematic of FPGA master program module
3 旋转变压器测角系统测试与分析
3.1 系统调试
采用安捷伦数字示波器及直流电源进行双通道旋转变压器角度测量系统的调试并对角度测量系统电路的中的重要信号波形进行抓取验证,如图6所示。
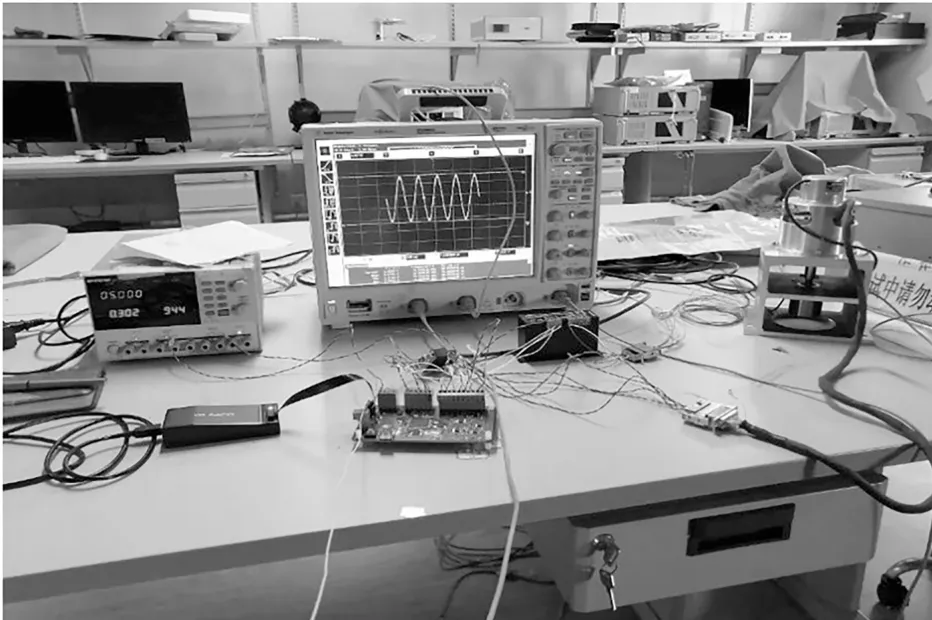
图6 测角系统调试现场图Fig.6 Schematic of testing site of angle measurement system
图7-10为示波器抓取的电路关键信号波形,从图中可以看出,AD2S1210按照FPGA程序进行初始化配置,输出了频率为2 KHz的旋转变压器励磁差分信号,同时旋转变压器在输出的正弦差分信号也满足AD2S1210输入格式。
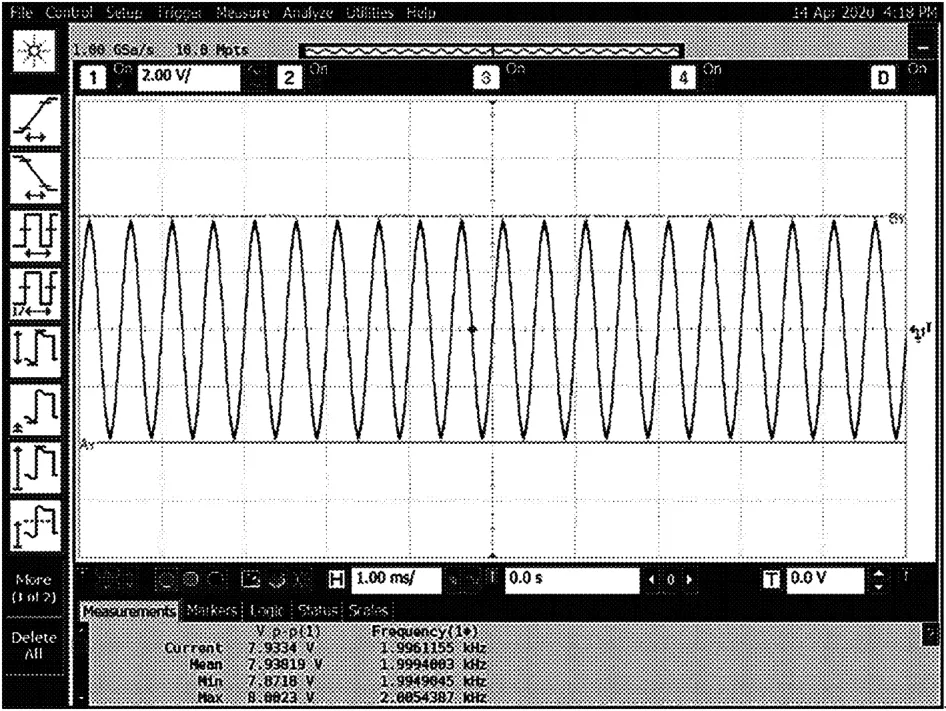
图8 励磁差分信号图Fig.8 Difference excitation signal waveform
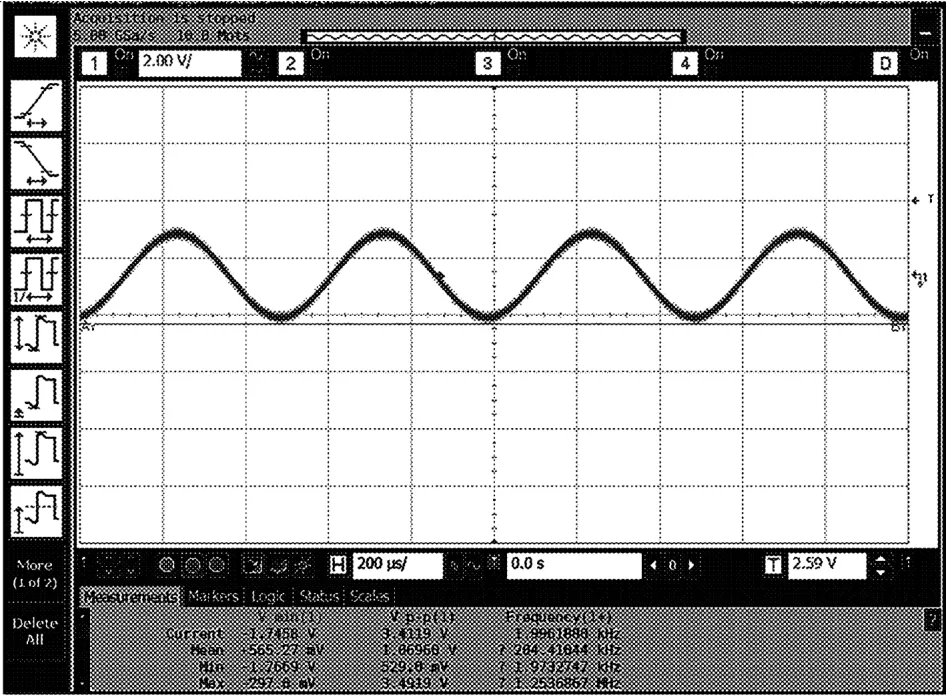
图9 正弦差分信号图Fig.9 Difference sinusoidal signal waveform
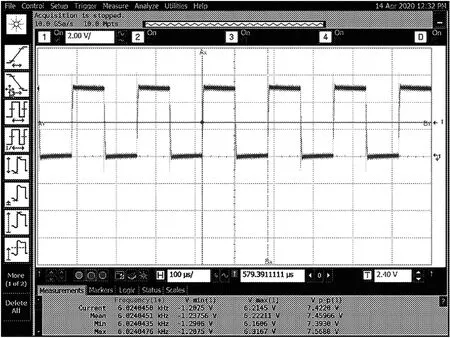
图10 电机驱动脉冲图Fig.10 Motor driven pulse signal waveform
3.2 测试结果
旋变及编码器最终得到的均为包含角度信息的十六进制源码。其中旋变输出的是21位分辨率的角数字量,分三个字节输出,编码器输出的是25位分辨率的角数字量,分为四个字节输出。源码与角度之间的计算公式为

式中:θ为旋变及编码器角度值;D为旋变及编码器十六进制源码转换为十进制后的数值;N为旋变及编码器分辨率,其中旋变N为21,编码器N为25。
FPGA控制电机以每分钟十五转的速度连续转动,通过上位机串口同时控制旋变和编码器不断采集电机当前角度,并分别纵向计算每次采集前后旋变及编码器所测得的角度变化量,将二者作差得到横向的相对误差。旋变及编码器角度变化曲线如图11所示,旋变及编码器角度相对误差曲线如图12所示。从图中可以看出,旋变得到的数据和编码器十分接近,误差在0′′~30′′之间,最终满足系统指标规定的±30′′精度要求。
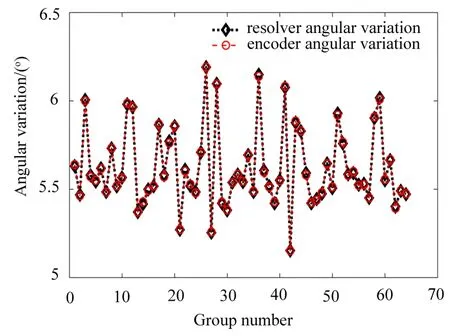
图11 旋变及编码器角度变化曲线Fig.11 Schematic of angular variation of resolver and encoder
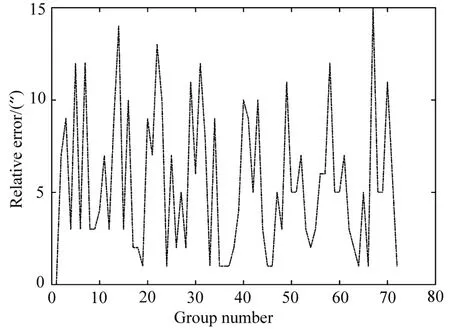
图12 旋变及编码器角度相对误差Fig.12 Schematic of relative error of resolver and encoder
4 结论
研究了双通道旋转变压器的测角原理,并制定系统的整体方案,设计了机械结构和软硬件电路,最后对搭建的角度测量系统进行了系统联调与数据分析。通过示波器万用表等测试工具验证了系统实际电路和设计的一致性,并将绝对式编码器得到的角度值作为基准,与旋转变压器所测得角度进行对比,得出了系统满足设计精度指标的结论。
猜你喜欢
现代临床医学(2022年5期)2022-09-28
昆明医科大学学报(2021年4期)2021-07-23
成都信息工程大学学报(2018年3期)2018-08-29
航天电子对抗(2018年3期)2018-07-14
制造技术与机床(2017年7期)2018-01-19
测绘科学与工程(2016年6期)2016-04-17
电子器件(2015年5期)2015-12-29
电子设计工程(2015年16期)2015-02-27
雷达学报(2014年4期)2014-04-23
电测与仪表(2014年13期)2014-04-04