基于公交车右转内轮差效应的范围研究
2021-09-27 05:31李英帅闫琦若
重庆交通大学学报(自然科学版) 2021年9期
李英帅,闫琦若,赵 聪
(1. 南京工业大学 交通运输工程学院,江苏 南京 211816; 2. 河海大学 土木与交通学院,江苏 南京 210098)
0 引 言
日常交通出行中,由于车辆转弯时产生的内轮差效应,当车辆在交叉口处右转弯时,车辆会逐步 “贴近”右侧非机动车及行人。内轮差效应是指车辆在交叉口转弯时,内前轮与内后轮的转弯半径不同而形成的不同时刻轨迹差值。2019年公安部交管局统计数据显示[1]:全国十大高风险旅客运输企业中违法车辆均占比90%以上,客货运输车辆肇事多发,企业安全主体责任不落实问题突出。此外,发生在城市道路事故导致的死亡人数同比上升4.8%,其中大型车辆内轮差导致的交通事故约占总事故数的30%[2]。由于人们对内轮差效应不了解导致事故频发,且车辆右转时,驾驶员要不断筛选关键信息[3],内轮差效应影响区域又为驾驶员视觉盲区,车辆驾驶员无法对已发生的事故及时做出反应,致使事故死亡率极高。
鉴于此,国内外学者对内轮差效应展开了研究。研究大致分为3个阶段:
1)由于交叉口处车辆转弯引发的事故层出不穷,李铁洪等[4]开始对此类问题进行思考,并发现内轮差效应,且根据实际经验总结出车辆轴距越大,转向角度越大时,内轮差越大的结论;
2)学者们通过对车辆在交叉口处右转弯情况的不同假设,建立出不同的几何模型。模型建立又经过了从理想到实际的3个层次:①假设在理想情况下车辆内前轮与内后轮均做匀速圆周运动,基于该理想情况下,D.HASHIDA[5]模拟出车辆的行驶轨迹;钱红波等[6]对不同车辆行驶数据进行分析,研究出其转弯时最大内轮差的情况;②研究者逐渐发现车辆在交叉口处转向并非做匀速圆周运动。李宗烜[7]对大型车侧向安全距离模型进行数理分析,对构建的数据库进行了修正;徐令选[8]通过阿克曼理论和现场实车试验验证,建立轨迹盲区面积模型,对不同车型进行仿真轨迹以及面积计算;③内轮差效应研究阶段的逐步递进并且逐步贴近实际情况,P.PITCHIPOO等[9]提出优化车辆后视镜中使用的设计参数从而克服盲区问题,并用模糊层次分析法对设计参数进行排序。
3)学者们在已经有足够的规划策略、模型结构、内轮差公式的基础上,选择自己认为最合适的模型,设计出具体成果来帮助驾驶员、非机动车与行人有效避免交通事故。K.YAMADA[10]通过在车辆方向盘中安装角度测量装置,利用车内系统的主控装置获取车辆右转时角度信息并带入预先存储的内轮差模型。通过激光投射装置、主动探测装置、声光报警设备将模型计算出的危险区域进行警示。CHEN Peng 等[11]在对大量数据进行分析的基础上,建立转弯车辆轨迹,再现了不同几何布局和运行条件下车辆转弯行为;全威等[12]提出一种基于多轴惯性传感器的方向盘转角检测系统,实现了对常见的驾驶行为的实车、实时辅助判别。
此外,对于内轮差问题的解决对策,多数学者都从驾驶员角度进行分析。如王清洲等[13]研究半挂汽车右转弯后视镜失效现象,提出增设后视镜保证驾驶员视野的方案;J.JIN等[14]分析大型车辆驾驶员在右转时视线变化情况,通过分析视线受限情况,为驾驶员提供车辆转弯有效方案,增进驾驶员可见性与行人车辆冲突间关系的理解。
以往国内外学者研究对象多是针对小汽车,货车或者带铰链的车型,很少有对于公交车这种车轴长,无铰链的具有代表性车辆的研究,并且对交叉口几何特征以及驾驶员因素考虑不足。笔者以南京市公交车为研究对象,实地调研不同公交车驾驶员在交叉口右转时的驾驶行为,将右转行为分为3类,并分别建立内轮差模型,以此作为城市交叉口内轮差效应产生的禁停区域范围的施划依据。
1 研究思路
1.1 基本原则
研究公交车内轮差效应时,遵循以下原则:
1)将公交车视为刚体。公交车前轮速度方向沿前轮的偏向方向,公交车后轮速度方向始终沿着前后轮的连线方向。
2)理想状态下模型的基本假设。转弯时车辆速度较慢且无侧滑,且内、外前轮的转角不变。
3)转向传动比。车辆在实施转向操作时,方向盘的转动度数与内前轮转角度数的比值(据此将方向盘的转动与车辆的实际转向情况联系起来)。
1.2 建模依据
对南京市某一常规公交车车型参数进行调研,车型各项参数为:车辆轴距L=5.9 m、车辆轮距D=2.1 m、车辆最大转弯角度Z=30°。
公交车在右转时,内轮差效应与交叉口类型、驾驶员转动方向盘习惯均有关,对南京市公交车驾驶员在无右转专用车道的交叉口转向情况进行实地调研。通过调研,可以将南京市公交车驾驶员右转行为分为3类,并以此进行建模:
模型一:驾驶员根据经验将方向盘打到适宜的位置(半圈左右),且在整个转向过程中基本不调整方向盘,即将完成转向时进行回正。
模型二:驾驶员在转向过程中往往不能做到第一时间就将方向盘打满,而要经过2~3个阶段,即两手操作过程中存在停顿,不连续。
模型三:驾驶员在转向开始时就逐渐将方向盘打满(一圈半左右),然后在转向完成1/2~2/3时进行连续性的回正,且在公交车刚好完成整个转向操作时,方向盘回到初始位置。
2 模型构建
2.1 模型一
通过结合车辆轴距、车辆最大转弯角度、车辆轮距,由余弦公式计算公交车最小转弯半径Rf/m。
(1)
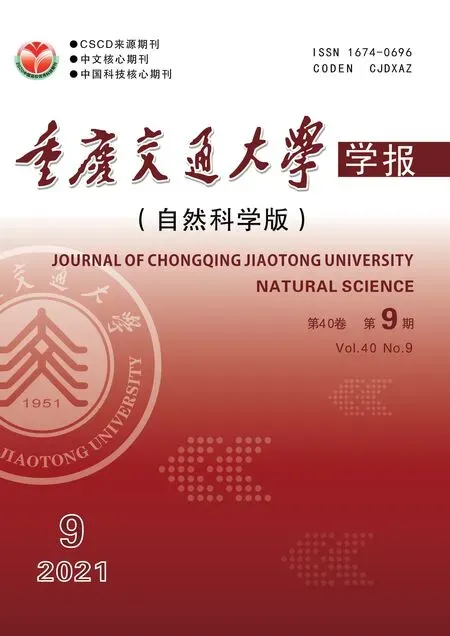
带入数据得公交车最小转弯半径Rf=12.88 m,则可由式(2)计算可得公交车内前轮最大转角β/(°),过程如图1。
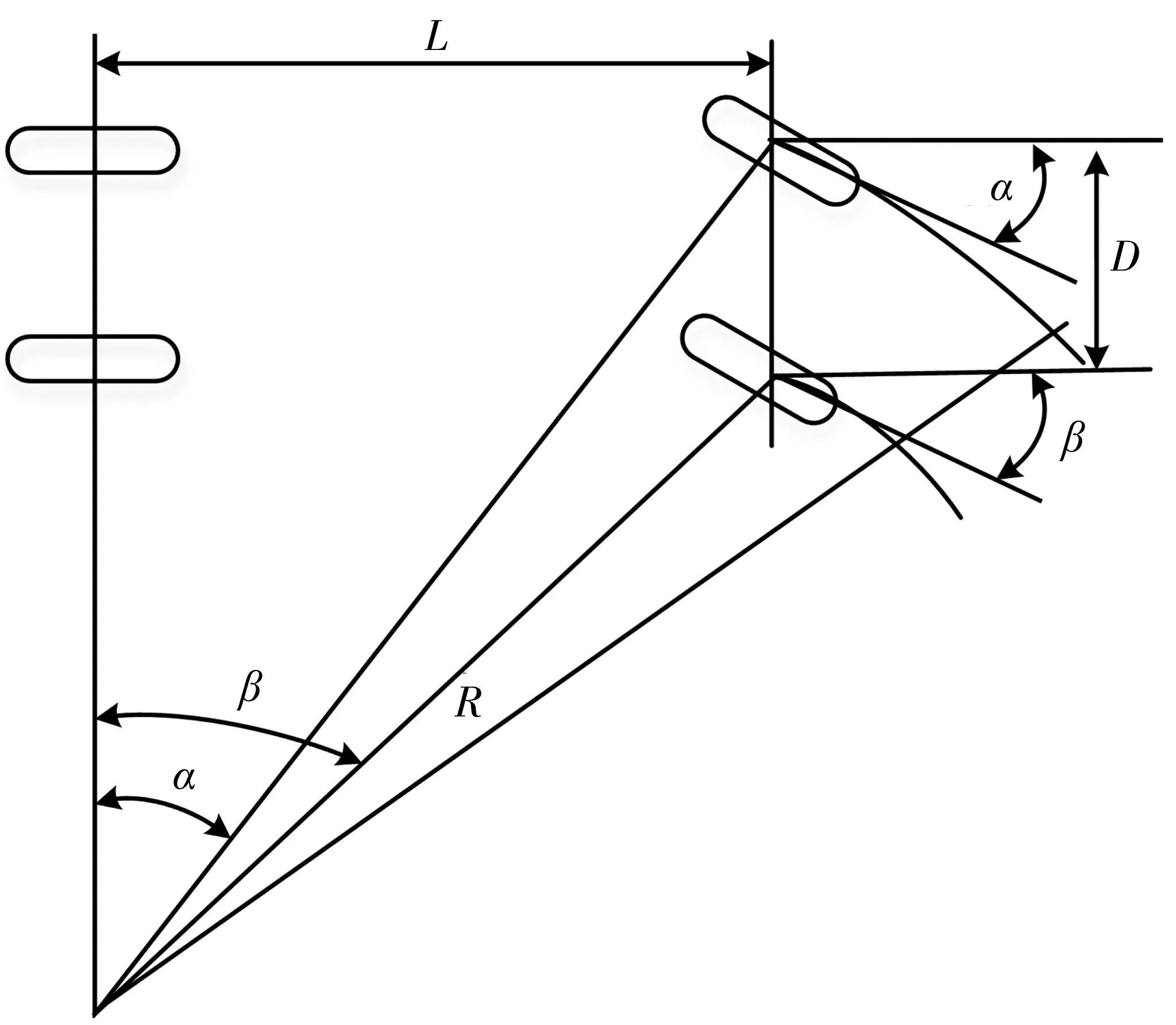
图1 双轴汽车转向时两侧转向轮偏向角Fig. 1 Deflection angle of the steering wheels on both sides of thetwo-axle car
cotα=cotβ+D/L
(2)
Rf=L/sinβ
(3)
式中:α为车辆右转时外前轮最大转角,β为车辆转弯时内前轮最大转角。通过式(2)可得到内前轮转角与外前轮转角之间的关系,消除前后轮并非都是做圆周运动而产生的误差。
驾驶员将方向盘打满时方向盘转动一圈半,此时内前轮最大转角β=27°。模型一中驾驶员仅将方向盘转动半圈并维持此状态不再变化,据此可假设模型一中内前轮转角β=9°,此时设置转弯半径R1=14 m。据此,绘制出模型一的车辆轨迹,如图2。
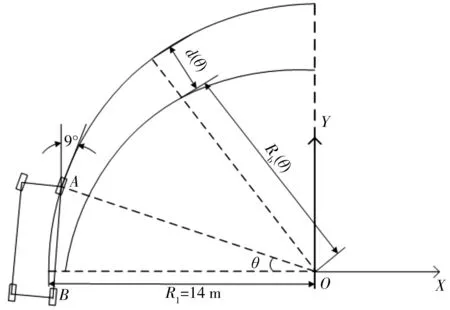
图2 模型一车轮轨迹Fig. 2 Wheel trajectory of model 1
由图2以公交车在交叉口处右转为例,内前轮做匀速圆周运动,将内前轮的轨迹圆心作为原点,建立平面直角坐标系。0<θ<90°,用θ来表示不同时刻车辆内前轮与圆心所在X轴负方向的夹角,Rb(θ)为某一时刻内后轮的轨迹与圆心O的距离。将内轮差d(θ)定义为内前轮与内后轮在不同时刻的轨迹差(因内后轮到达某一地点永远慢于内前轮到达该地点的时间),于是d(θ)=R-Rb(θ)。已知R1=14 m,求内轮差区域即可转化为对内后轮坐标的研究。
设在任意t时刻,内前轮A点的坐标为(xa,ya),内后轮B点的坐标为(xb,yb),根据车辆框架可明显得到:
(xa-xb)2+(ya-yb)2=L2
(4)
由于在t时刻,车辆内前轮A点与圆心所在X轴负方向的夹角θ已知,且内前轮轨迹为圆,则(xa,ya)已知,可以得到任一点处xb与yb的关系式。又因为(xa,ya)=(-R1cosθ,R1sinθ),内前轮的速度方向沿着轨迹的切线方向,设内前轮方向ω1为:
ω1=(sinθ,cosθ)
(5)
根据匀速圆周运动几何规律可得出t与θ的关系为:
t=Rθ/Va
(6)
式中车辆内前轮速度为Va,由于车辆为前轮驱动,内后轮的运动方向始终沿着内前轮与内后轮的连线方向,即内后轮方向ω2为:
ω2=(xa-xb,ya-yb)/L
(7)
通过上式可将内前轮的转向角β与ω1和ω2联系起来:
cotβ=ω1·ω2/(|ω1|·|ω2|)=[(xa-xb)sinθ+(ya-yb)cosθ]/L=-[xbsinθ+ybcosθ]/L
(8)
β=9°,R1=14 m已知,任意时刻t的sinθ与cosθ也已知,可得到xb与yb的关系式。将式(4)(8)联立,求出内后轮的轨迹坐标,带入内轮差公式,得到模型一最终内轮差区域,即为模型一的禁停区域。
2.2 模型二
考虑到部分公交车驾驶员的实际驾驶情况,习惯双手控制方向盘的驾驶员一般采用分阶段转弯,不一次将方向盘打到转向最适合角度。因此,模型二假设驾驶员路口处90°转向分为0~30°,30°~60°,60°~90°共3阶段。由阿克曼公式可知,当车辆轴距不变,内前轮转角变大时,公交车转弯半径会变小,由于3个阶段的30°需组合成完整的90°拐角,因此O2设置于O1A连线上,取半径为13.5 m;O3设置于O3A连线上,取半径为12.88 m,且12.88 m恰好为最小转弯半径。由2.1节可知,公交车内前轮转向最大角度β=27°,模型二假设第1、2、3阶段中公交车内前轮转角为9°、18°、27°,转弯半径R2=14.00、13.50、12.88 m。绘制出模型二的车辆轨迹图,如图3。
图3 模型二车轮轨迹Fig. 3 Wheel trajectory of model 2
由图3可知,当车辆在交叉口处刚准备右转时,驾驶员先将方向盘打半圈,对应着的内前轮转动了9°,并保持这一状态运行了前1/3路程;当刚到达第1、2阶段临界点处时,驾驶员将方向盘再转动1/2,对应内前轮再次转动9°,并保持这一状态运行了1/3路程;到达第2、3阶段临界点处时,驾驶员将方向盘打满,再次转动9°,保持这一状态运行了1/3路程,最终完成路口处的90°转向。模型二全过程用如表1。
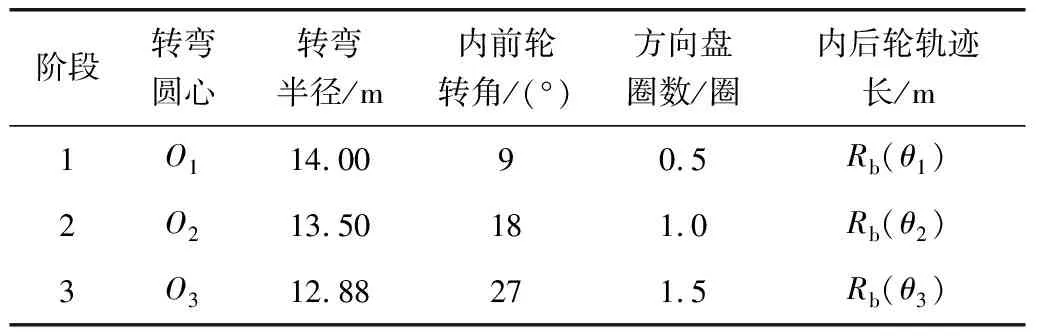
表1 三个阶段的模型数据Table 1 Three-stage model data
表1中θ1、θ2、θ3分别为车辆前内轮与圆心O1、O2、O3所在X轴负方向的夹角,其中0≤θ1<30°;30°≤θ2<60°;60°≤θ3<90°因为(xa,ya)=(-R2cosθ-1.12,R2sinθ+1.12),且内前轮A的速度方向沿着轨迹的切线方向,规律同2.1节,故内前轮的转向角β可由公式(5)~(8)求得。
由于用数据理论力学中的速度投影定理:刚体上任意两点的速度在这两点的连线上的投影相等。带入公式(8)可得内后轮的速度分量形式为:
(9)
因θ=90°时,内后轮的坐标可通过几何代数计算得到,对公式(9)积分就可得到内后轮的轨迹方程,进一步可求出内轮差区域,即为模型二的禁停区域。
2.3 模型三
模型三是在模型二的基础上,进一步贴近实际情况的模型。在模型二中将转弯分为3个不同阶段,而在模型三中整个转弯过程作为一个整体,公交车内前轮的转角不是陡然变化,而是循序渐进地逐步达到最大转向角度。即转角随时间的导数可能为一个定值。因此模型三中内前轮轨迹并非匀速圆周运动,而是“转弯半径”不断变化的轨迹。并且模型需满足已知的车辆在转弯时曲率半径先增大后减小的规律。
在高等数学中,有下列曲线:
(10)
式(10)满足:①当0≤θ<45°时,曲率半径是关于θ的单调递增函数;②当45°<θ≤90°时,曲率半径是关于θ的单调递减函数;③当θ=45°时,曲率半径达到最大值。此曲线的性质恰好满足公交车内前轮转弯轨迹规律。因此可以假设内前轮轨迹函数如式(11):
x3+y3=12.883
(11)
由于公交车为刚体车辆,故由模型三内后轮状况仍满足上两个模型的状况,即内后轮的运动方向始终沿着公交车前内轮与后内轮的连线方向。因此绘制出模型三的车辆轨迹图,如图4。
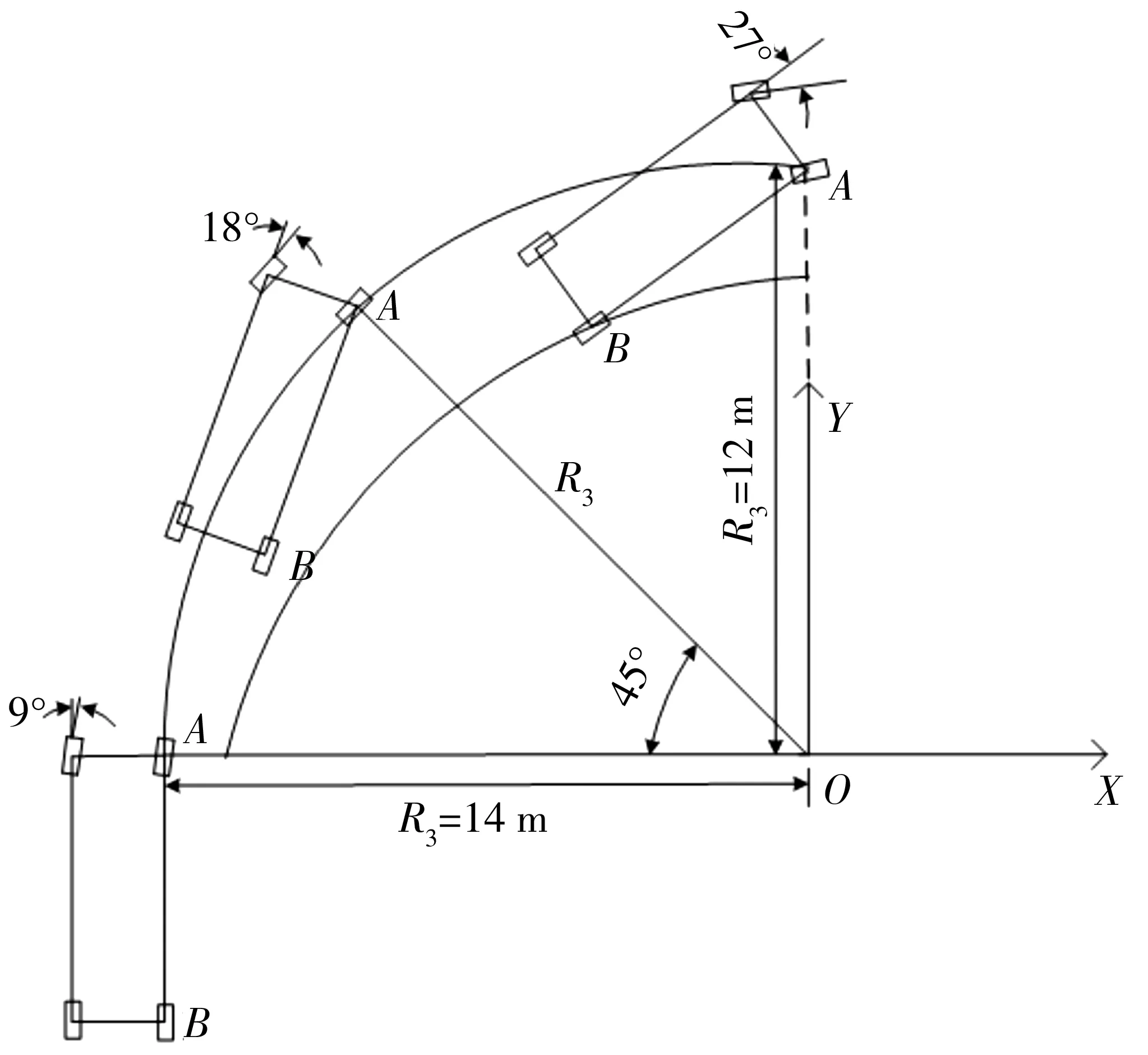
图4 模型三车轮轨迹Fig. 4 Wheel trajectory of model 3
由图5可知,内前轮的轨迹非匀速圆周运动,转弯半径R3起初为14 m,之后逐步减小,当完成转向时,转弯半径R3为12.88 m,因此,模型三是最贴近实际情况的模型。如果可以在实际生活中测量出内后轮的实时运动轨迹,再与内前轮轨迹方程联立,就可用MATLAB直观地得出内轮差区域,即为模型三的禁停区域。
3 案例分析
对南京某一交叉口进行渠化设计。根据提出的3个模型所计算出的内轮差区域,以南进口道为例,对交叉口南进口道右转专用车道进行内轮差禁停区域的分等级施划,如图5。
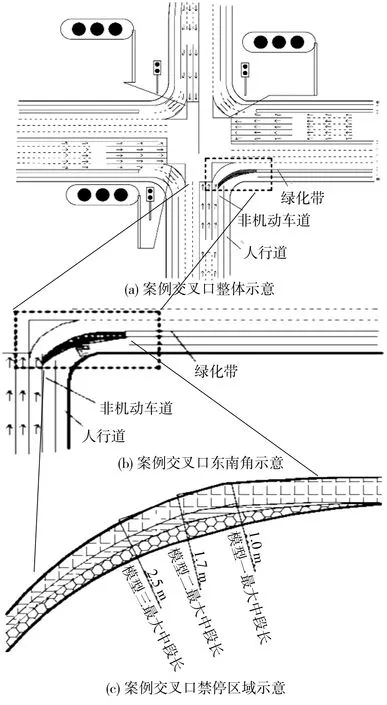
图5 案例交叉口渠化示意Fig. 5 Schematic diagram of channelization of the case intersection
对第2节中3个模型的计算可知,模型三禁停区域的范围最大,在转弯完成一半时,内前轮的曲率半径最大,于是施划时区域中段长度最大,达到2.5 m;模型二施划起终点的原则与模型一相同,且采用转弯45°时内轮差最大的设计,以公交车为代表的大型车辆的内轮差最大可达到1.7 m;对模型一,相关研究最为详尽,典型车型的最小转弯半径与轴距比也固定在2.0左右,且内轮差的数值分布多在0.5~1.0 m之间[15],于是考虑将转弯45°时的最大值设置为1.0 m。
以往研究对于禁停区域的研究成果大多落实于警示系统的设计,仅上海市部分路口处设置了内轮差效应的禁停区域。笔者根据构建的3个模型,对内轮差效应的禁停区域范围进行危险等级的划分,即:① 3种禁停区域重合区为绝对禁止驶入的区域,如图6中最宽为1.0 m的月牙形区域;②模型一与模型二重合的部分为相对危险的区域,在驶入时要严格注意转弯车辆状况,如图6中最宽为1.7 m的月牙形区域;③为提醒道路使用者提高注意力区域,尤其是在有公交车转弯时该区域也严禁驶入,如图6中最宽为2.5 m的月牙形区域。
4 结 语
笔者通过现场观测南京市公交车右转时内部与外部规律,结合实时道路情况,将公交车驾驶员转向操作分为3类,并据此设计出3种公交车转向内轮差模型,对每种模型都用高等数学、理论力学等知识进行研究,计算出模型对应的内轮差区域即禁停区域。最后以南京市某一交叉口作为案例进行分析,给出3种模型禁停区域范围:①模型一、二、三禁停重合区域,即最宽处1.0 m月牙形区域为绝对禁止驶入的区域;②模型一、二重合区域,即最宽处1.7 m月牙形区域为相对危险的区域,在驶入时要严格注意转弯车辆状况;③模型三禁停区域,即最宽处2.5 m的月牙形区域为提高注意力区域,道路使用者应提高注意力,尤其是在有公交车转弯时该区域也严禁驶入。
笔者模型将模型计算得到的内轮差区域按危险等级进行施划,从设施优化方面可以减少甚至避免内轮差效应导致的交通事故的风险。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
当代水产(2022年6期)2022-06-29
汽车实用技术(2022年7期)2022-04-20
小学生学习指导·爆笑校园(2019年6期)2019-09-10
新传奇(2018年47期)2018-08-09
专用车与零部件(2018年1期)2018-03-25
发明与创新·中学生(2017年7期)2017-07-10
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10