
多能互补微网系统能量优化策略
2021-12-03 08:33吴清涛李俊杰
上海节能 2021年11期
吴清涛 李俊杰
国网上海市电力公司市北供电公司
0 前言
本文着重研究多能互补微网系统能量优化,并综合考虑分布式发电、分布式储能、冷热电三联供系统的配合和使用,在用户冷热电负荷均得到满足的情况下,建立系统运行成本和污染环境排放量最小的多目标优化函数,并采用带有极值干扰的粒子群算法对所建模型进行求解,验证优化策略的有效性。
1 多能互补微网系统设备单元分类及负荷分类管理
1.1 设备单元分类
多能互补微网系统多种分布式设备单元中,风力发电和光伏发电由于其出力特性受自然资源影响,属于不可控型设备单元;燃气轮机、燃气锅炉、电制冷机属于可控型设备单元;余热锅炉、吸收式制冷机受制于前一工段出力状况,属于跟进型设备单元;储冷、储热和储电属于储能设备单元。
1)不可控型设备单元
在地理环境、自然条件确定的情况下,可通过模型计算得到最大功率输出点,风机和光伏发电通常跟踪该点参与运行。
2)可控型设备单元
基于不同的热电负荷要求,多能互补微网系统中联供系统运行模式包括以热定电、以电定热【1】。
在以热定电运行模式中,用户的热负荷需求为常规制热和吸收式制冷机制冷时消耗的热功率的总和,此时热电联供机组、燃气锅炉、储热设备共同运行,保证总热负荷需求大致等于余热锅炉、燃气锅炉、储热设备的热出力总和。
在以电定热运行模式中,用户的电负荷需求为常规电力和电制冷机制冷时消耗的电功率的总和,此时冷热电联供机组、风力发电、光伏发电、储电设备单元的出力总和应优先匹配用户的电负荷,当电能不足时向电网购电,电能超出负荷需求时向电网售电或为储电设备充电。
1.2 负荷分类管理
在设备单元分类的基础上对负荷分类,管理策略如下:
1)冷、热负荷:冷负荷由电制冷机、溴化锂吸收式制冷机和储冷设备共同供给,热负荷由燃气锅炉、余热锅炉和储热设备共同供给。上述设备分属于可控型、跟进型和储能型,考虑到实时电价,在每一时段都将对这三种设备的供能成本进行排序,按序调动直到系统冷、热功率平衡。
考虑到跟进型设备的非独立性,吸收式制冷机与余热锅炉的出力将根据前序工段工作状态进行调整,防止越限运行。
2)电负荷:电负荷由风、光、主电网、燃气轮机和储电设备共同供给。为提高可再生能源的利用率,风、光发电单元将一直处于最大功率点运行[2],且在每一个时段,都将对设备的供电成本进行排序,并按序位启停。
2 多能互补微网系统能量优化策略
2.1 优化方法
多能互补微网的优化主要考虑经济性和环保性两方面。大多数情况下,经济性和环保性是互相矛盾的,难以同时达最优,因此只能折中优化。多目标优化问题,1896年法国经济学家帕累托最早开始研究,之后,诺依曼、库恩、塔克尔等数学家也进行了探讨,但至今未有统一定论,目前求解思路主要有以下几种:
1)化多为少法:即将多目标化为单目标进行求解,主要有目标法、线性加权法、理想点法等。
2)分层序列法:按重要性对目标进行排序,后序目标的解在前序目标的最优解集中进行求解,直至所有目标的最优解求出。
3)层次分析法,由运筹学家T.L.Saaty提出,是一种定性与定量相结合的层次化分析方法,对缺乏数据且结构复杂的情况较为适用。
多能互补微网系统的优化,根据问题的复杂程度和优化解的方法,采用基于线性加权思想的随机加权法【3】对双目标进行单目标化优化处理。
2.2 目标函数
本文多能互补微网能量管理优化策略是在系统配置方案已确定的情况下考虑的,因此主要考虑运行成本和维护成本,设备的固定投资作为沉没成本不予考虑。在保证冷、热、电负荷需求的前提下,多能互补微网系统经济性的目标函数为:

式中:
——多能互补微网系统t时段的成本,元;Dg——可控出力单元;K ti——微电源启停状态(0表示停,1表示启);Ctnh——微电源能耗成本,元/kW;Pti——微电源输出功率,kW;Ctwh——微电源运行维护成本,元/kW;Ciqt微电源设备启停成本,元/次;δPtbat——蓄电池充放电函数;K tB、K tS——微网从电网购、售电的状态(0表示否,1表示是);Ptbgrid、Ptsgird——微网与电网之间购、售电功率,kW;M tb、M ts——微网向电网购、售电的价格,元/kW。
2.3 约束条件
多能互补微网系统能量优化的约束条件主要包括:功率平衡约束、设备出力特性约束、设备运行特性约束。其中,功率平衡约束主要是冷、热、电功率的平衡,设备出力约束则包括各设备单元的功率、储能约束,设备运行特性约束主要包括设备爬坡率及运行时间的限制。
2.3.1 等式约束
1)电功率平衡约束


式中:
Pgrid——电网交换功率(购电时为正,售电时为负),kW;PMT——燃气轮机输出功率,kW;PPV——光伏发电功率,kW;PWT——风力发电功率,kW;PBSE_D——蓄电池放电功率,kW;PEL——电负荷,kW;PEC_in——电制冷机吸收电功率,kW;PBSE_C——蓄电池充电功率,kW。
2)热功率平衡约束

式中:
——余热回收装置输出的热功率,kW;QGB_heat——燃气锅炉输出热功率,kW;QHSE_D——蓄热装置输出热功率,kW;QHL——系统热负荷,kW;QHSE_C——蓄热装置蓄热功率,kW。
3)冷功率平衡约束

式中:
——电制冷机输出冷功率,kW;QISE_C、QISE_D——蓄冷装置蓄冷、制冷功率,kW;——吸收式制冷机输出冷功率,kW;QCL——系统冷负荷,kW。
2.3.2 不等式约束
出力/储能设备功率约束

式中:
——分布式设备单元状况(1表示运行,0表示停运);Pmini、Pmaxi——各设备单元功率上下限值,kW;PtDGt——时段设备单元出力功率。
2.4 能量管理优化算法
多能互补微网系统能量管理优化由于涉及变量较多,普通的算法存在计算量大、不易操作、并行计算效率低等问题,而群智能算法具有演化计算能力,可通过一定的搜索规则自动查寻求解问题的最优解,因此在模型优化应用中十分广泛。
群智能优化算法目前主要有粒子群算法、蚁群算法、模拟退火、遗传算法、禁忌搜索、神经网络等【4】,大多是对某种自然过程的模拟。粒子群算法由于不考虑交叉、变异等操作,粒子收敛速度要比遗传算法快,适用于本文高维度的多目标优化。
2.4.1 粒子群算法
粒子群算法由J.Kennedy和R.C.Eberhart博士于1995年提出,来自对鸟群社会行为研究的启发,是一种基于迭代的优化算法。在PSO算法中,目标函数的解空间初始化时将随机出现一组随机解,每一个解称为一个粒子,每一个粒子都拥有位置和速度两个属性。粒子的每一个位置都对应一个由特别制定的适应度函数确定的适应值。在每一次迭代中,粒子将通过跟踪两个关键适应值来更新自身的位置和速度,其中一个是粒子本身找到的最优解,称为个体最优解Pbest,另一个是粒子群全体找到的最优解,称为群体最优解Gbest。
J.Kennedy和R.C.Eberhart博士最原始版本粒子群公式为:
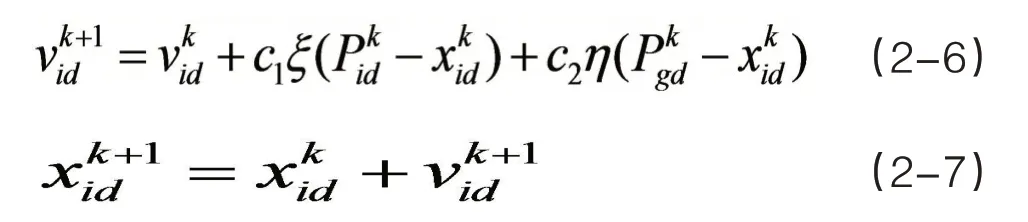
式中:
c1——为粒子跟踪Pbest的认知学习系数;c2——粒子跟踪Gbest的社会学习系数;ξ、η——[0,1]区间内均匀分布的随机数;——粒子当前与下次的位置相量;——粒子当前和下次的速度相量;——粒子的自身最优解和群体最优解。
该版本又称为基本粒子群算法,若Pkgd表示所有粒子的最优解,则为全局版本的基本粒子群算法;若Pkgd仅表示该粒子附近的粒子群的最优解,则为局部版本的基本粒子群算法。全局粒子群算法收敛速度要比局部版本快,但陷入局部版本的可能性要大于全局版本。
2.4.2 极值变异的混合型粒子群算法
为了兼顾收敛速度及收敛精度,本文提出了极值变异的混合型粒子群算法,即在搜寻前期采用极值变异的粒子群算法以增大粒子跳出局部最优陷阱的可能,在后期采用全局优化以改善收敛速度。经验证,该混合算法表现良好。
算法公式为:

式中:
D1、D2——粒子的个体极值和群体极值变异因子;tP、Tp——粒子自身极值停滞次数和停滞次数阈值;tg、Tg——粒子群体极值停滞次数和停滞次数阈值。
算法流程见图1。
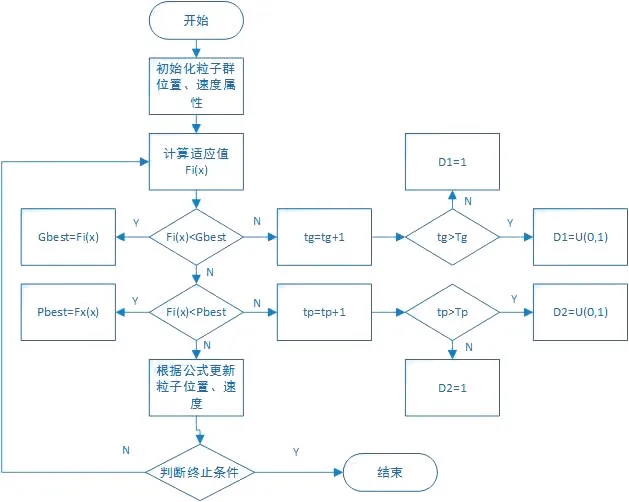
图1 极值变异的粒子群算法流程图
3 算例分析
3.1 负荷数据及能源价格
本文以我国某地多能互补系统负荷数据为例进行验证,详细的冷热电负荷需求【5】、实时电价、天然气表见图2、图3、表1。

表1 天然气价格、热值表

图2 典型日冷热电负荷曲线

图3 典型日实时电价曲线
3.2 系统设备参数
1)分布式发电设备参数
分布式发电设备包括风机发电和光伏发电两种,参数见表2。

表2 WT、PV参数
在最大功率跟踪模式下,选取的风力发电单元和光伏发电单元的典型日发电功率预测见图4、图5。

图4 典型日风力发电功率曲线
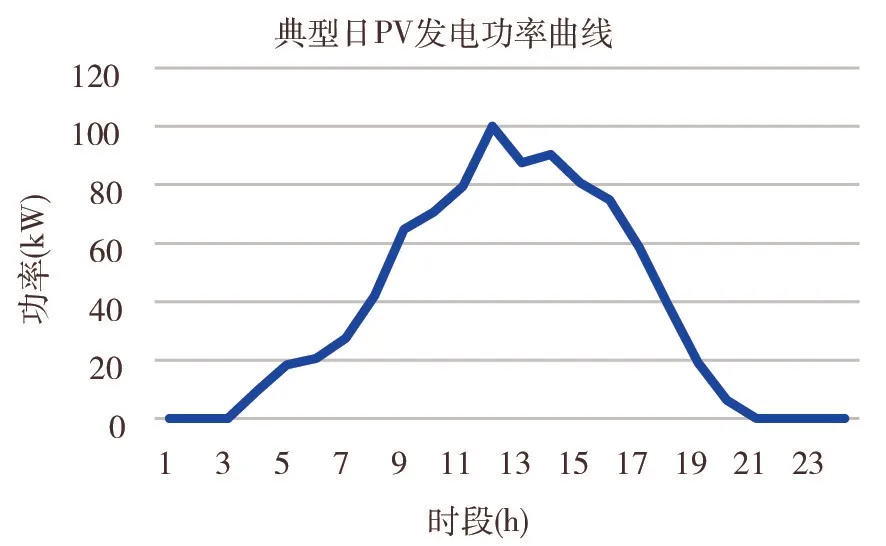
图5 典型日光伏发电功率曲线
2)分布式储能设备参数
分布式储能设备包括蓄电池储电设备、热水蓄热器储热设备、蓄冰空调储冷设备三种,储能设备参数见表3。

表3 分布式储能设备单元参数
3)CCHP联供系统设备参数
CCHP联供系统中,燃气锅炉、燃气轮机的出力由燃料量决定,电制冷机的功率由用电量决定,属于主动设备。而余热锅炉和吸收式制冷机具体出力受到前序工段设备的出力状况及系统优化需求的影响,属于从动设备。主动设备和从动设备参数见表4和表5【6】。
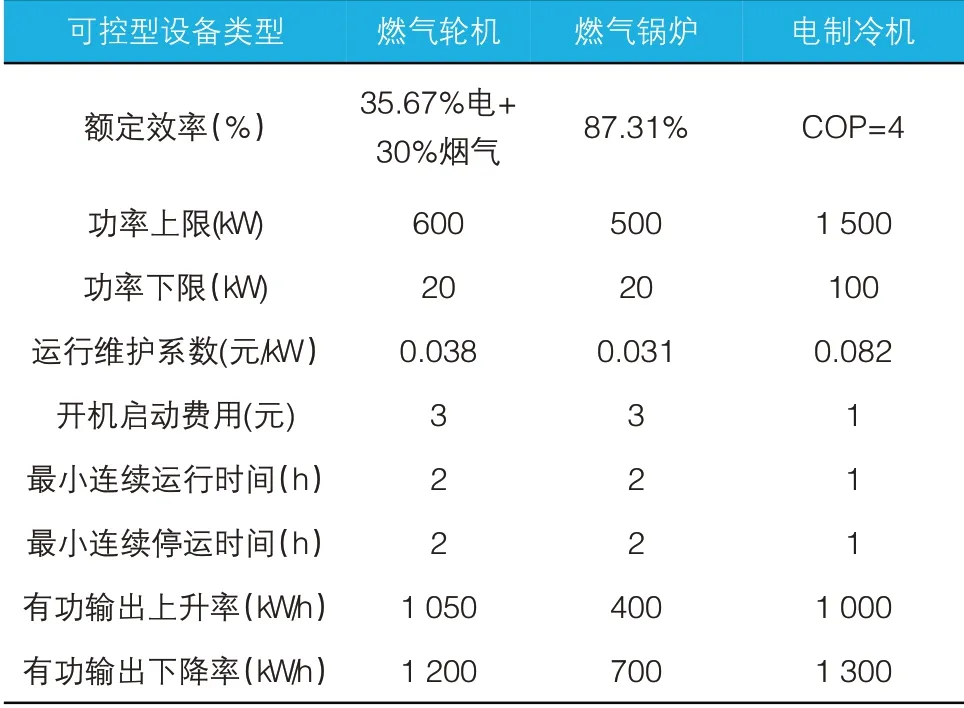
表4 联供系统主动设备主要参数
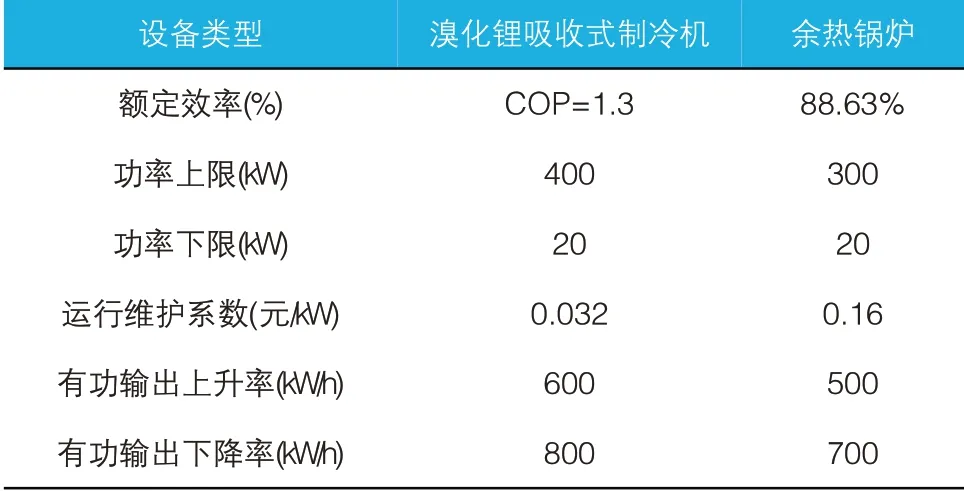
表5 联供系统从动设备主要参数
3.3 优化结果
利用3.1和3.2给出的具体数据,对多能互补运行模式下进行了多能互补微网系统能量调度优化求解,结果见图6、7、8。

图6 GT、HRB、AC运行计划
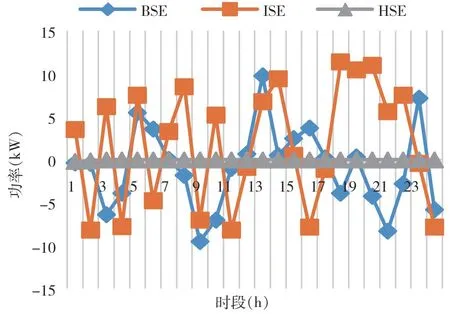
图7 BSE、ISE、HSE运行计划
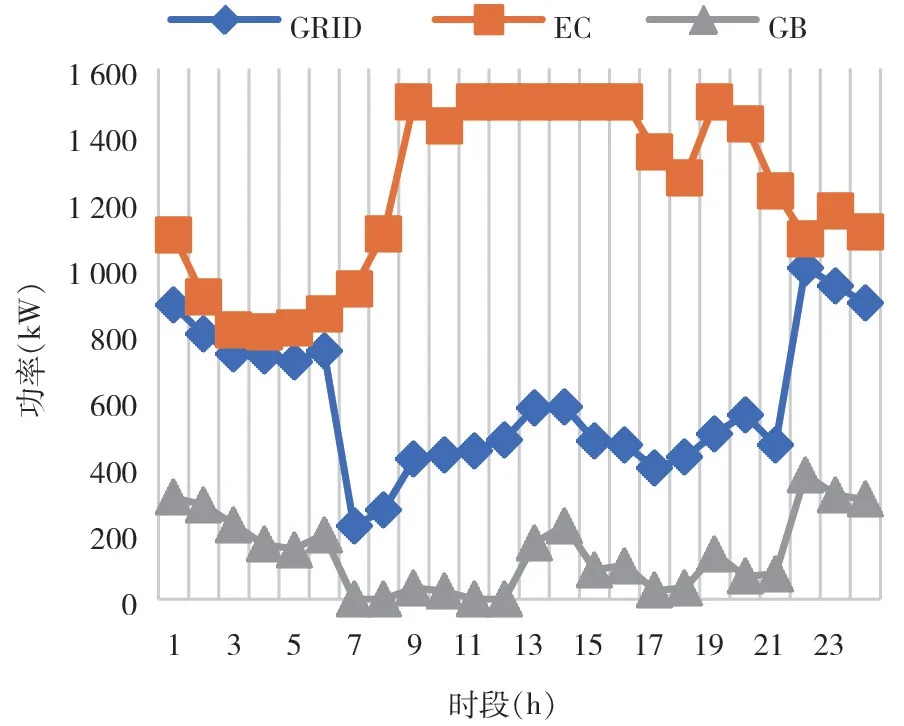
图8 GRID、EC、GB运行计划
在多能互补模式下,该系统在一个典型日的优化运行成本为20 880.74元,CO2排放量为15 745.68 kg。
3.4 算法收敛性分析
本文采用了带有极值变异因子的混合型粒子群算法,粒子群规模选取如下:
粒子数N=400
粒子维数D=216
为了验证收敛结果的正确性,给定了2 000次的迭代深度,以防止出现粒子提前停止搜索的情况。
经过多次优化运算后,最终结果表明,算法能在迭代次数500次内收敛到优化解,由于粒子的起始位置随机,个别情况下粒子群的迭代次数在100次以内就能完全收敛,具体收敛情况见图9。

图9 适应值收敛趋势
采用基本粒子群算法、极值变异粒子群算法和极值变异混合型粒子群算法进行优化计算,多次运行后,以平均迭代次数表示收敛速度,以平均运行成本表示收敛精度,最终结果见表6。

表6 不同粒子群算法收敛结果
从表6中可看出,全局版本的基本粒子群算法虽然收敛速度快,但容易陷入局部最优,导致收敛精度差;极值变异的粒子群算法收敛精度最高,但收敛速度最慢;极值变异混合型粒子群算法兼顾了收敛速度和收敛精度,求解效果最好。
4 小结
本文先对多能互补微网系统的设备和负荷进行分类,在此基础上提出了相应的能量管理策略,再在保证负荷的前提下,对多目标问题给出了目标函数和约束条件,最后提出了极值变异的混合型粒子群算法。
猜你喜欢
现代电力(2022年2期)2022-05-23
低温工程(2022年6期)2022-01-01
新世纪智能(数学备考)(2021年10期)2021-12-21
新世纪智能(数学备考)(2021年10期)2021-12-21
能源工程(2021年3期)2021-08-05
控制与信息技术(2021年2期)2021-07-23
上海航天(2021年1期)2021-03-04
新世纪智能(数学备考)(2020年10期)2021-01-04
语数外学习·高中版中旬(2020年10期)2020-09-10
石油化工建设(2020年1期)2020-08-24
