
GEO星机双基SAR时间同步误差对运动目标检测的影响建模与分析
2022-02-14 12:41董锡超田卫明
信号处理 2022年1期
崔 畅 董锡超,2 胡 程,3 田卫明,2
(1.北京理工大学信息与电子学院雷达技术研究所,北京 100081;2.北京理工大学重庆创新中心,重庆 401135;3.卫星导航电子信息技术教育部重点实验室(北京理工大学),北京 100081)
1 引言
近年来备受关注的双基地合成孔径雷达(SAR)系统是传统单基地SAR 系统的延伸,其采用收发分离的工作方式,具有很好的隐蔽性和抗干扰性,且配置灵活,有利于复杂的电磁环境下运动目标的侦查和监视[1]。特别地,当利用已有的星载SAR 系统作为照射源,地面或机载接收信号时,一方面,不需要额外增加发射设备,只需要提供接收设备,因此显著降低了开销[2];另一方面,星载SAR 系统轨道高,具有广阔的监测范围[3]。地球同步轨道星机SAR系统(GEO SA-BSAR)采用GEO SAR发射信号,GEO发射端的波束范围达上千公里,且波足速度与机载相当[4],因此可给机载平台提供长时间稳定的波束覆盖,然后飞机搭载多通道接收系统,可在任意波束照射到的位置接收GEO SAR 的反射信号,具有多种成像模式,包括前视成像和后视成像,因此相比于传统机载SAR 系统检测范围更广。此外,GEO SAR 的高度远远高于飞机平台,可减轻杂波多普勒的距离依从性,更加有利于运动目标检测。
GEO SA-BSAR系统的概念最早于1997年提出,美国MITRE公司提出用静止GEO卫星发射信号,并采用高空无人飞机作为接收设备,可以实现大范围的场景监视以及实时的动目标检测[5],但它只从系统参数出发,分析了动目标检测的可行性,不涉及构型设计与数据处理过程。随后,对GEO SA-BSAR的研究着重在静止场景成像方面,包括成像特性分析、分辨率分析、满足一定成像需求下的双基地构型设计方法,以及成像算法等,解决了GEO SA-BSAR 静止场景成像的基础和核心问题[6-9]。
对于GEO SA-BSAR 运动目标检测系统,其研究包括对静止同步轨道与机载双基地SAR 的运动目标检测关键问题研究。文献[10]推导了静止同步轨道发射,两个机载线性阵列接收回波的信号模型,并利用载频、通道间隔或飞机速度差异解决方位向模糊问题。而非静止同步轨道的双基地SAR 动目标相关问题的研究包括利用速度SAR(VSAR)实现方位向解混叠[11],双基地构型设计[12],以及对具有未知参数的运动目标成像的方法[13]。但是,这些研究均未考虑非理想因素对动目标检测性能的影响。
GEO SA-BSAR 系统由于收发系统分置在不同平台,不得不面临时间同步误差的问题,这是由于发射端和接收端的频率源差异导致的,即使发射端和接收端都采用高稳频率源,时间同步误差也会给数据处理带来误差项,影响处理性能,因此可能还需要进行额外的时间同步误差补偿。双基地SAR在成像、干涉应用下,同步对频率源精度要求达到10-14量级,稳定度要求达到10-8量级[14]。对同步误差影响分析的研究主要集中在成像方面,文献[15]将振荡器产生的随机相位噪声建模为二阶平稳随机过程,分析得到相位噪声会导致像点偏移、主瓣展宽和虚假旁瓣,还会对SAR 图像造成低频相位调制,导致干涉性能下降。文献[16]对时间同步误差对成像的影响进行了研究,时间同步误差为线性或者随机的,不同形式的误差会有不同的影响,其中线性误差会导致目标的方位向分辨率降低、目标出现方位向偏移;随机误差会导致积分旁瓣比增高。但是,上述研究未涉及时间同步误差对GEO SABSAR动目标检测的影响。
为了研究GEO SA-BSAR 系统的时间同步误差对动目标检测性能的影响,本文首先对GEO SABSAR 系统在时间同步误差影响下的多通道运动目标信号建模,并推导得到了动目标检测性能指标与时间同步误差之间的解析表达式。理论分析和仿真结果表明时间同步误差会导致目标的输出信噪比损失,并产生径向速度估计误差。结果表明,时间同步误差产生的信噪比损失还与飞机运行速度有关,通过增大飞机运行速度可以减弱时间同步误差对信噪比损失的影响,而时间同步误差产生的径向速度估计误差与双基地夹角有关,通过减小双基地夹角可以减弱时间同步误差对径向速度估计的影响。
文章后续章节安排如下:第2 节介绍了时间同步误差模型,并推导了时间同步误差影响下GEO SA-BSAR 系统运动目标多通道信号频谱;第3 节求解了输出信噪比损失和径向速度估计误差与时间同步误差的解析表达式,分析了时间同步误差对动目标检测产生的影响;第4 节利用GEO SA-BSAR 的参数仿真验证了时间同步误差对信噪比损失和速度估计误差的影响机制;第5节对全文进行总结。
2 时间同步误差建模
时间同步误差是由于接收和发射频率源的差异造成的。一般,对于单基地系统而言,发射信号和接收信号都基于同一频率源,分频产生触发信号。发射和接收触发信号之间仅存在一个固定时延t0,频率源的稳定度和精确度都很高,因此很少考虑时间同步问题。而对于GEO SA-BSAR 系统,发射机和接收机会采用不同的频率源,两个频率源的差异导致发射和接收设备的触发信号不一致,产生时间同步误差,影响数据处理结果。
时间同步误差主要包括触发时间偏差和脉冲重复时间误差两个部分,其中,触发时间偏差是发射与接收端的触发信号的初始时间之差,这是一个固定的时间偏差Δt0;脉冲重复时间误差是由于频率源的不准确和不稳定产生的发射和接收的脉冲重复时间之差,由确定偏差和随机误差组成。综合考虑触发时间偏差和脉冲重复时间误差,则发射和接收雷达的触发信号时序为(示意图如图1所示):
其中,PRT 为收发雷达的标准脉冲重复时间,ta=m·PRT 为方位向时间,ΔPRTGEO和ΔPRTplane分别为GEO 和飞机平台雷达实际脉冲重复时间与标准值之间的确定偏差,nGEO和nplane分别表示GEO 和飞机平台脉冲重复时间的随机误差。因此,系统的时间同步误差可以表示为:
其中α表示PRT的相对误差,nprt为随机误差,
式(2)中,第一项为收、发初始触发信号间的固定时间差,第二项为由于收发实际脉冲重复时间的确定偏差,会随着方位向时间出现线性积累,第三项为随机时间误差,随机相位误差可以建模为服从均值为0,方差为σ2的正态分布过程。
机载接收端的多通道系统的时序均来自同一频率源,不同通道间的同步误差可认为是相同的,那么,若不考虑回波丢失的情况,在时间同步误差的影响下,对于位置参数和速度参数分别为rp和vp的目标,第m个通道的回波信号模型可以表示为:
其中tr为快时间,σ为目标的散射系数,ωa(·)为方位向包络,kr为调频率,c为光速,fc为雷达工作频率,Rbi,m(·)为第m个通道目标的双基地斜距历程,可以用四阶泰勒展开精确表示[12],即:
其中,k1~k4为泰勒展开的各阶系数,d为通道间隔,vR为飞机速度。将回波信号经过距离压缩后,变换到距离-多普勒域,第m个通道的运动目标回波信号频谱可以表示为:
其中Wa(fa)为变换到频域的方位向包络,r表示距离,e′(·)与(·)分别为利用驻定相位原理将信号变换到频域后e(·)与Rbi(·)的频域表达,ψ(·)为不同通道的公共相位项,表示为:
其中vT为GEO 卫星的速度矢量,vr为目标的径向速度,满足和uRP分别为合成孔径中心时刻目标到GEO 卫星和飞机斜距的单位矢量。将(6)表示成矢量的形式:
其中,pt(fa)为不含误差的目标空域导引矢量,如(10)所示。
对于静止目标,令vp=0,即可根据(9)得到静止杂波的多通道频谱表达式和导引矢量,即为:
3 时间同步误差对运动目标检测的影响分析
从上一部分对时间同步误差影响下信号建模得到的式(6)可以看出,时间同步误差会对运动目标产生两个方面的影响,首先会使目标的距离徙动线出现偏移,偏移量为c·e(ta),此外,时间同步误差e(ta)中的线性项会导致信号在多普勒域出现一个频率延迟,导致信号的空域导引矢量出现变化。
GEO SA-BSAR 系统利用多通道来实现动目标检测,以抑制场景中的强杂波信号。现有的SAR 动目标检测方法包括两通道的DPCA 方法和ATI 方法,以及多通道的STAP 方法。其中,DPCA 和ATI方法在进行杂波抑制时必须满足苛刻的DPCA 条件,而GEO SA-BSAR 系统由于双基地构型的选取十分灵活,难以保证信号的时移不变性,无法满足DPCA 条件,动目标检测性能无法达到最优。STAP方法不受DPCA 条件限制,实现最优处理,于是本文研究了利用STAP 进行动目标检测时时间同步误差的影响。
在进行SAR STAP 处理时,为了获取全孔径下的最佳信噪比,往往将STAP 处理与方位向匹配滤波相结合。首先将多通道信号回波变换到距离-多普勒域,SAR 具有长合成孔径时间的特性,变换到多普勒域后,信号只和瞬时频率有关,各个频点的信号趋于相互无关,因此STAP 在距离-多普勒域只需要进行空域滤波,从而降低滤波器的维度,减少运算复杂度。然后,基于运动参数进行方位向匹配滤波,获得最大的信噪比,同时得到运动目标的定位结果[17-18]。那么,SAR STAP处理可以表示为:
其中h(fa)为方位向匹配滤波函数,为用于搜索估计的径向速度,z(r,fa;vr)为速度为vr目标的多通道GEO SA-BSAR 回波信号,RQ为杂波的协方差矩阵用于将回波中的杂波分量白化,可以直接从回波数据中估计得到为径向速度下目标空域导引矢量,用于多通道的相参积累,只有在假设的径向速度与实际的目标速度vr相等时,处理结果达到最大。
观察(15),当存在时间同步误差时,一方面会使估计的杂波协方差矩阵RQ变化,另一方面会导致回波数据z(r,fa;vr)中的目标导引矢量出现变化,接下来将分析这两个变化对动目标检测性能的影响。
首先,对于杂波协方差矩阵的变化,当存在时间同步误差时,GEO SA-BSAR 杂波的协方差矩阵变为:
其中RN为噪声的协方差矩阵,假设满足RN=σ2nI,此外,
对于低轨SAR 多通道回波数据,其杂波的协方差矩阵的大特征值数目为1[18]。对于GEO SABSAR 系统,从静止杂波的协方差矩阵中可以观察到矩阵的秩也为1,对杂波的协方差矩阵RQ进行特征值分解,得到:
其中,λm为RQ的特征值,满足λ1>>λ2=…=λM=,um为RQ的特征向量,特征向量U=[u2,…,uM]构成了噪声子空间,那么,协方差矩阵的逆为:
根据(15),STAP处理的最优权矢量表示为:
然后,对于回波数据空域导引矢量变化,这导致定义的目标导引矢量pt(fa,vr)与实际回波信号失配,造成信噪比损失。根据最优STAP 处理(15),输出信噪比损失可以表示为[17]:
为了得到输出信噪比损失的解析表达式,首先,利用矩阵求逆引理推导得到杂波协方差矩阵逆的解析表达式为:
那么,将(22)代入(21)得到的输出信噪比损失的解析表达式,将RQ、pt、pc和Γ代入并整理得到:
其中
由此可见,时间同步误差带来的信噪比损失主要是由线性同步误差带来的,其中时间同步误差产生的信噪比损失可以表示为:
该信噪比损失还与系统参数有关。此外,由于目标波束导向存在错误,导致径向速度估计存在误差,径向速度误差为:
可见时间同步误差带来的径向速度估计误差也是由线性同步误差导致,且该径向速度误差还与有关,这取决于双基地构型参数中的双基地夹角。
4 仿真验证
为了更直观说明时间同步误差对动目标检测的影响,我们仿真了信噪比损失随时间同步误差变化的情况,以及在不同双基地构型下,径向速度估计误差随时间同步误差变化情况。GEO 卫星采用了“小8”轨道,仿真中的GEO 轨道参数以及GEO SA-BSAR的系统参数如表1所示。
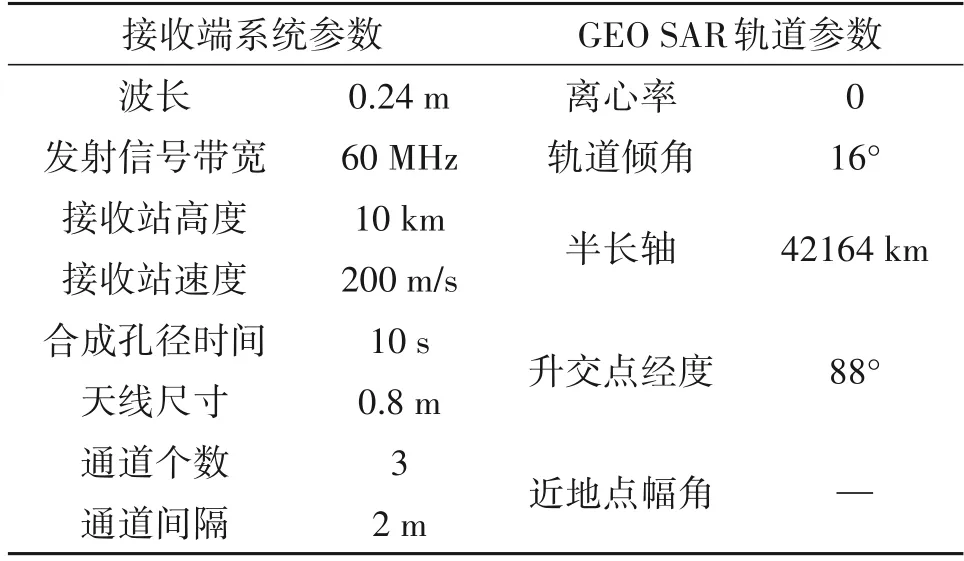
表1 GEO SA-BSAR动目标检测系统参数Tab.1 Orbital and system parameters of GEO SA-BSAR moving target indication system
4.1 信噪比损失分析
在不考虑速度偏移的情况下,图2 仿真了不同线性时间同步误差下,输出目标信噪比情况,其中当α=0,即不含时间同步误差时,在径向速度为0 m/s 的位置处出现深凹口,即静止目标被抑制,而其他速度处的信噪比较高。而随着线性时间同步误差的增加,一方面深凹口位置出现变化,实际上受到时间同步误差的影响,杂波的位置也会出现变化,随着α的增加杂波位置分别为0 m/s,0.16 m/s,1.57 m/s 和15.70 m/s,与图2 中不同曲线出现凹口的位置相同,因此杂波仍会被抑制;另一方面,信噪比在α=10-7时出现了明显的下降。
图3仿真了当存在时间同步误差时,利用STAP进行运动目标检测时,不同线性时间同步误差在10 m/s径向速度处产生的信噪比损失的情况。从图中可以看出,时间同步误差可能造成比较严重的信噪比损失,当时间同步误差的线性参数大于1.60×10-8时,造成的信噪比损失超过了3 dB。
图4 仿真了不同飞机速度参数下,当存在时间同步误差时,利用STAP 进行处理得到的信噪比损失随线性同步误差变化的情况。从图中可以看出,随着卫星速度的增加,可以容忍的时间同步误差也增加,因此可以通过调整飞机的速度来减弱时间同步误差对动目标检测的影响。当飞机速度为200 m/s 时,时间同步误差的线性参数小于5×10-8时,信噪比损失都不会超过3 dB。
4.2 径向速度误差分析
根据上述的公式推导可以看出,时间同步误差也会对径向速度估计产生影响,且主要是线性同步误差产生的影响。图5仿真了不同线性时间同步误差下,具有10 m/s 径向速度的目标的波束形成结果,可以看出,线性时间同步误差会使峰值位置出现偏移,当α=10-7时,偏移量为15.70 m/s。
径向速度估计误差随线性同步误差变化情况如图6 所示,可以看出径向速度估计误差随着线性同步误差线性增加,且当线性同步误差大于1.66×10-10时,时间同步误差产生的径向速度估计误差超过0.10 m/s,导致运动速度无法准确估计。
此外,考虑到时间同步误差产生的径向速度估计误差还与双基地构型参数β=‖ ‖uTP+uRP有关,且该双基地构型参数介于0到2之间,因此还仿真了不同双基地构型参数下,径向速度估计误差的变化情况,如图7所示。从图中可以看出,随着构型参数β的增加,可以容忍的时间同步误差也增加。实际上构型参数β随着双基地角的增大而减小,对于0.1 m/s的径向速度估计误差需求,当β为0.5 时,线性同步误差需小于1.66×10-10,而当β为2时,线性同步误差只需小于6.66×10-10。因此,可以通过减小双基地角可以减弱时间同步误差对径向速度估计的影响。
经过仿真分析可知,当线性时间同步误差小于10-10量级时才能使径向速度估计误差小于0.10 m/s,此时,PRT 的偏差为10-13s量级,对应的频率源准确度为10-10量级。一般,不同的频率源的稳定度不同,石英晶体的频率源准确度为10-5~10-10量级,原子频率源的准确度在10-10~10-15量级[19]。因此,要想实现径向速度估计误差小于0.10 m/s,需采用双层恒温型的石英晶体频率源,甚至是原子频率源。
5 结论
本文对GEO SA-BSAR 系统在进行动目标检测时,时间同步误差产生的影响进行了研究。首先,对时间同步误差影响下,GEO SA-BSAR 系统多通道运动目标的信号模型进行了建模,得到了多通道信号频谱。然后,利用解析的方法对时间同步误差造成的信噪比损失和径向速度估计误差进行了分析。最后,利用仿真定量说明了不同系统参数和不同双基地构型下,时间同步误差对输出信噪比和径向速度估计的影响。结果表明,时间同步误差中的线性误差会导致目标输出信噪比损失,并产生径向速度估计误差,为了使信噪比损失小于3 dB 且径向速度估计误差小于0.10 m/s,该线性误差应小于10-10量级。此外,通过调节系统参数和双基地构型也能缓解时间同步误差对动目检测的影响,其中增加飞机运行速度可以减弱时间同步误差对信噪比损失的影响,而减小双基地夹角可以减弱时间同步误差对径向速度估计误差的影响。
猜你喜欢
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
中等数学(2021年9期)2021-11-22
中学生数理化(高中版.高一使用)(2021年2期)2021-03-19
雷达与对抗(2020年2期)2020-12-25
舰船电子对抗(2020年5期)2020-11-26
火控雷达技术(2020年2期)2020-10-16
雷达与对抗(2020年1期)2020-06-05
舰船电子对抗(2020年1期)2020-04-27
北京航空航天大学学报(2019年9期)2019-10-26
