
基于GPS的同步定频微网功率精确均分策略
2022-04-22 06:25李柏君边敦新赵艳雷
电力电容器与无功补偿 2022年2期
李柏君,边敦新,赵艳雷
(山东理工大学电气与电子工程学院,山东 淄博 255022)
0 引言
微电网是实现分布式可再生能源就地消纳的有效手段,同时与大电网相互配合可以提高电力系统的可靠性和安全性[1-2]。通过逆变器将分布式电源组成微电网,有利于提升微电网的经济性和功率等级,但如何控制多逆变器之间的功率均分和抑制环流成为制约微电网安全可靠运行的主要问题[3-4]。
在低压微电网以孤岛状态运行时,由于分布式电源的位置分布的随机性造成逆变器与负荷的公共耦合点(point of common coupling,PCC)的线路阻抗不等,并且线路阻抗主要呈阻性,因此传统下垂控制无法实现功率均分和产生环流。在传统下垂控制基础上,文献[5]引入计算母线电压重新设计下垂方程,实现母线电压的稳定,但低压微网中母线公共耦合点难以查找,且母线电压选取存在误差,文献[6]提出通过自适应下垂系数改进下垂控制,实现频率电压的无静差控制,但不同的微网系统下垂系数和阻感比的不同,因此工程应用性较差。在反下垂控制(P-V,Q-f)基础上,文献[7-10]引入自适应虚拟电阻,但并未完全解决虚拟电阻会造成电压跌落的问题。上述控制方案存在以下问题:功率环节后面接有低通滤波器,影响系统的动态性能;若下垂系数设计不合理,频率易超出偏移范围,造成系统失稳。针对上述控制方法的不足,有学者提出利用全球定位系统(global positioning system,GPS)或PMU(phasor measurement unit)来使各逆变器的电压相位同步及定频(50 Hz)[11-15],文献[11-12]使用分段式下垂的方法来实现功率均分,但此方法对于下垂系数选取较为复杂,不利于实际应用。文献[13-14]提出在同步旋转坐标系下电压-电流(U-I)下垂,该方法无需计算功率,有利于提高系统的动态响应。但未考虑线路阻抗不等对功率均分的影响。
针对上述问题,提出一种基于GPS的同步定频微网功率均分控制策略。利用GPS的秒脉冲(pulse per second,pps)来生成微网逆变器派克变换的同步旋转相角,使各逆变器之间电压相位同步和频率固定,同时采用虚拟电阻来减小线路阻抗的差异对功率分配的影响,并综合考虑功率均分效果和电能质量,给出一种虚拟电阻的具体选取方法,同时引入幅值补偿环来提升引入虚拟电阻后的电压质量。
1 低压微网特性分析
通过逆变器并联系统模型分析低压微网系统的环流特性和功率分配原理,图1为逆变器并联系统模型图。

图1 逆变器并联系统模型Fig.1 Model of parallel system of inverter
其中:Ej、θj(j表示1,2)分别为逆变器j的电压幅值和相位;ij为逆变器j电流;Zlj为逆变器j的线路阻抗;Zoj为逆变器j的等效输出阻抗;U∠0为公共母线电压;Zload为公共负载;iload为负载电流。
1.1 环流特性分析
根据逆变器并联系统模型与基尔霍夫定律可得

式中,Zj为逆变器j的总输出阻抗。
通常,逆变器的等效输出阻抗Zoj由滤波器设计参数和内部环路控制器的参数决定。为了减小逆变器等效输出阻抗对输出电压的影响,往往将Zoj调整为接近0,并且在低压微网中,逆变器的线路阻抗主要呈阻性,可认为R远远大于X,故逆变器的总输出阻抗为Z j=Rlj。为了方便分析,假设Z1=Z2,即Rl1=Rl2(Rlj为逆变器j的线路电阻),式(1)可简化为

式中,icc为两逆变器之间的环流。
当逆变器线路阻抗不等时,根据式(1)可得

环流的存在使各逆变器的功率无法精确分配。根据式(2)、(3)可知,当线路阻抗相等时,电压幅值差和相位差与环流有关;而且当线路阻抗不等时,会加剧环流的产生。受逆变器调制增益的影响,逆变器之间的电压幅值会出现较小的差异,难以对其调节[10],并且相位差引起的环流远大于幅值差,因此一般通过消除相位差和增大线路阻抗来减小环流。
1.2 功率分配机理
根据图1逆变器并联系统模型可得有功功率和无功功率的表达式为
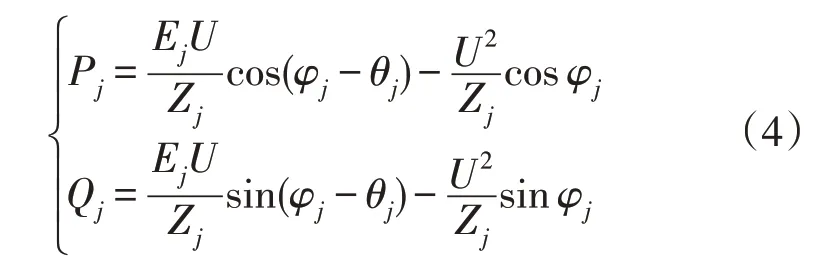
式中:φj为逆变器j的线路阻抗角;U为负载的PCC处的电压幅值。
在低压微网中,阻感比为7.7,认为φ=0,并且负载远远大于线路阻抗,认为sinθ≈θ,cosθ≈1,同时逆变器的总输出阻抗由线路阻抗决定。此时逆变器的有功功率和无功功率的表达式可简化为

由式(5)可知,当E1≈E2,两台逆变器的有功功率的分配由线路阻抗决定,当θ1≈θ2时,两台逆变器的无功功率的分配也由线路阻抗决定。两台逆变器的有功功率和无功功率对比的表达式为

由式(6)可知,两台逆变器有功功率和无功功率占总功率的比重、有功功率和无功功率的误差表达式为

式中:Pj、Qj为逆变器j分担的有功功率和无功功率;ΔPerr、ΔQerr为两台逆变器之间的有功功率差和无功功率的差;Po、Qo为两逆变器的实际输出的有功功率和无功功率。
由式(6)、(7)可知,有功功率的分配受逆变器的电压幅值差和线路阻抗差影响,而无功功率的分配受逆变器的电压相位差和线路阻抗差的影响。当电压幅值差和相位差一定时,减小线路阻抗的差异能解决逆变器的功率分配问题。
2 同步定频微网功率精确均分策略
通过对低压微网的环流特性和功率分配原理进行分析,可知减小线路阻抗差异和消除电压相位差可使两逆变器之间功率均分并减少环流。
2.1 微网同步和定频控制
电压相位差是造成逆变器之间功率不能均分的原因之一。为消除相位差,需要使各逆变器的电压相位保持同步。逆变器的电压电流双闭环控制过程在旋转坐标系下进行,为派克变换提供相同的旋转相位角δ即可实现微网内逆变器的电压相位同步。
采用GPS的时间同步已广泛用于通信和电力系统,并且GPS的1pps的初始时间与世界标准时间(coordinated universal time,UTC)的时间同步,因此通过GPS的1pps计算生成同步旋转坐标下相角δ可实现逆变器输出电压相位同步,相位同步装置原理和结构见图2和图3。利用GPS的1 pps锁定电压正向过零点的位置,然后数字计数器将高精度晶振输出的频率生成50 Hz脉冲,并以此作为输出电压的基准频率,在接收到下一次1 pps信号时,对当前电压相位的正向过零点的位置进行修正。根据上述流程可得到频率为50 Hz的实时旋转角δ(t)。
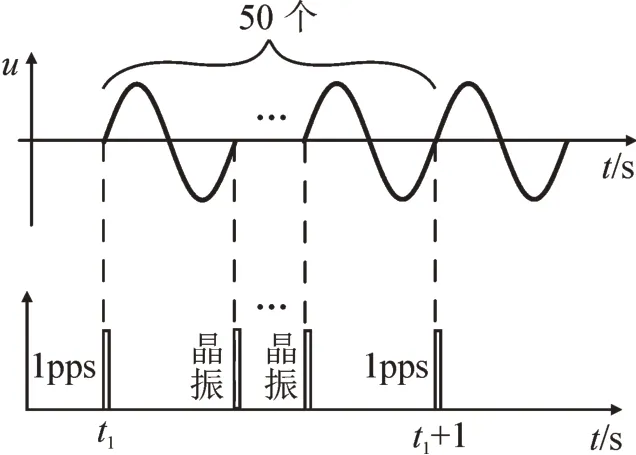
图2 相位同步装置原理图Fig.2 Principle diagram of phase synchronization device

图3 相位同步装置结构图Fig.3 Structural diagram of phase synchronization device
根据图2可以得到电压相角的计算公式为

式中,fN为工频,即50 Hz。
逆变器根据相位同步装置生成的同步旋转相角δ(t)使逆变器的控制过程处于同一参考坐标系下,保证了逆变器的输出电压相位一致和频率固定(50 Hz),实现了各逆变器同步运行,避免频率出现偏移。此外高精度晶振的误差极小,当GPS接收器发生短时故障时,相位同步装置依然可以输出频率为50 Hz的旋转相角δ(t),使微网持续运行。
2.2 基于虚拟电阻的U-I下垂控制
在低压微网中,线路电阻不等是造成逆变器的功率不均分的原因之一。虚拟阻抗法可以有效地解决线路阻抗不等的问题。引入远大于线路电阻的虚拟电阻,有效地减小了线路电阻的差异对功率分配产生影响,进而改善线路阻抗比,实现功率的精确分配,同时具有无需获知线路阻抗准确数据的优势。
引入虚拟电阻后系统等效图见图4。

图4 引入虚拟电阻后的等效系统Fig.4 Equivalent system after introduction of virtual impedance
通过引入合适的虚拟电阻,使两逆变器的总阻抗近似相等。根据式(6)可知,有功功率和无功功率实现了合理分配。逆变器的控制过程在同步旋转坐标系下进行,d轴作为电压矢量方向,即Uqref=0,故以虚拟电阻Rv作为下垂系数的U-I下垂公式为

微网内逆变器的控制过程采用U-I下垂-电压-电流三环控制策略,基于虚拟电阻的下垂环可为电感电流双闭环提供参考电压,同时电压环采用比例积分(PI)控制,电流环采用比例P控制,可以实现对直流量快速且无静差跟踪。U-I下垂-电压-电流三环的系统控制框图见图5。

图5 系统控制框图Fig.5 Control block diagram of system
图中:kvp和kvi为电压环的比例系数和积分系数;kip为电流的比例系数;L和C分别为滤波器的电感和电容;r为滤波器电感的等效电阻;kpwm为逆变器的PWM调制增益,工程上一般设为1。因d轴和q轴控制参数和控制环路相同,下面以d轴为例进行分析。
由图5(a)可得系统的戴维宁等效模型为

逆变器的空载电压增益Gud(s)为

逆变器未引入和引入虚拟电阻的等效输出阻抗Zo(s)和Z(s)分别为

取kvp=0.1,kvi=300,kip=20,L=1.5 mF,C=3μF,r=0.1Ω,根据式(11)-(13)绘制电压空载增益波特图和不同虚拟电阻Rv的逆变器输出阻抗波特图分别见图6、7。

图6 空载电压增益波特图Fig.6 Bode diagram of no load voltage gain
在旋转坐标系下对电压电流双闭环的控制参数进行设计同时并对空载电压增益和等效阻抗进行分析,此时逆变器的稳态频域响为0。由图6可知,在0附近处,逆变器的空载电压增益为1(0 dB=1),相位为0,可以实现对直流量无静差调节,但由图7可知,随着虚拟电阻增大,逆变器的等效输出阻抗幅值与虚拟电阻大小相同(-52.8 dB≈0.002,-6.02 dB=0.5),并且等效输出阻抗相位由纯感性变为接近纯阻性。综上所述,逆变器的等效输出阻抗由虚拟电阻决定且不对逆变器的空载电压增益产生影响。当虚拟电阻逐渐变大时,逆变器1、2总阻抗比表达式和变化图分别如式(14)、图(8)所示。

图7 不同虚拟阻抗的逆变器输出阻抗波特图Fig.7 Output impedance Bode diagram of inverter with different virtual impedance

式中:n为逆变器1、2的总输出阻抗比;Rv为虚拟电阻。
由图8可以看出,两逆变器选取的虚拟电阻越大,逆变器1、2的总阻抗差异减小。但虚拟电阻较大时存在较大的电压跌落,甚至超出电压的额定范围,并且随着虚拟电阻的增大,总阻抗比差异的效果减小程度逐渐降低。

图8 逆变器1、2总阻抗对比图Fig.8 Comparison diagram of total impedance of inverters 1 and 2
基于以上分析,虚拟电阻的选择需要考虑以下2个方面:
1)保证逆变器输出电压的稳态精度。输出电压整体波动范围应为额定电压UN的95%~105%,且当输出有功功率最大时,输出电压最小。
2)在保证逆变器的输出电压的允许范围内,使逆变器的功率合理均分且具有良好的动态性能。
根据上述条件可以得出表达式为
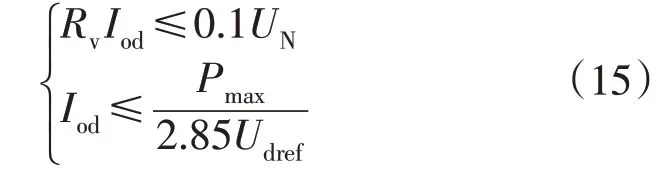
式中,UN为额定电压,即311 V。
通过上式可得虚拟电阻的范围表达式为

式中,Pmax为三相最大功率
虚拟电阻的选取应综合考虑功率均分效果和电能质量问题,本文在保证输出电压在允许范围内的前提下,按式(16)选取。
2.3 幅值补偿环
加入虚拟电阻必然会带来电压跌落问题,尤其在线路阻抗不等程度较大和逆变器承载的功率等级较高时,电压跌落会明显加重。因此,本文在d轴控制环路引入幅值补偿环节,以消除虚拟电阻产生的电压跌落。幅值补偿环控制框图见图9。
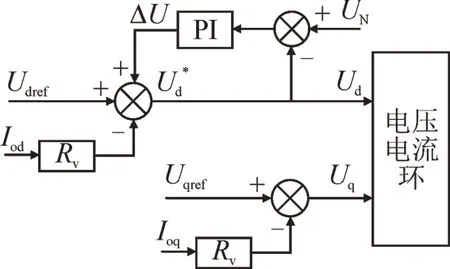
图9 幅值补偿控制框图Fig.9 Block diagram of amplitude compensation control
通过将d轴参考电压减去下垂控制的电压降得到的电压环参考电压与额定电压UN的差值,差值经过PI调节后得ΔU,并将实时补偿到电压环的参考电压上。新生成的电压电流的参考电压为

根据图1和式(2)可得加入幅值补偿后的环流公式为
结合图1、4可知,若选取的虚拟电阻过小,则线路间仍存在环流,同时虚拟阻抗也会造成压差。根据公式(4)、(9)可得到虚拟阻抗造成压差为

因虚拟电阻产生的压降不同,两逆变器的幅值补偿亦不同。由式(18)可知,若电压差异变大,环流将进一步增大,直至一逆变器承载全部负荷的功率。因此,通过引入通信使两逆变器的幅值补偿值相同,进而同时实现环流抑制和幅值补偿。此外,因幅值补偿值为直流量,微网系统对于通信的实时性和带宽要求不高。
2.4 整体控制策略
同步定频微网控制策略的控制框图见图10。

图10 同步定频微网控制框图Fig.10 Control block diagram of constant-frequency synchronous micro-grid
图中的虚拟电阻Rv,dq轴参考电压Udref、Uqref均为恒定值,且微网各逆变器的恒定参数均相同。逆变器的派克变换和反派克变换的同步旋转相位角δ由相位同步装置生成,确保了各逆变器的电压相位同步和频率固定,通过幅值补偿环节将生成的补偿值反馈给相邻逆变器以保证电压质量。dq轴参考电压经U-I下垂环、幅值补偿环路和电压电流双闭环生成dq轴控制电压,然后经过派克变换生成三相同步控制电压,该电压经SPWM(sinusoidal pulse width modulation)调制后输出三相输出电压。
3 仿真验证
在Matlab/Simulink仿真环境下搭建了逆变器并联系统时域模型,逆变器并联系统仿真拓扑与模型相关参数见图11、表1。为表明本文所提出的控制策略的良好性能,与采用反下垂控制策略(P-V,Q-f)的逆变器并联系统时域模型进行了对比分析。
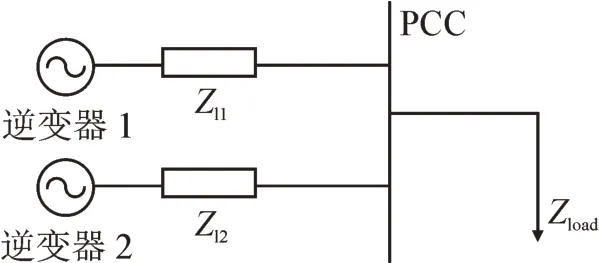
图11 逆变器并联系统仿真拓扑Fig.11 Simulation topology of parallel inverter system

表1 模型参数Table1 Model parameters
设置仿真时间为1 s,两台逆变器的额定容量相同,在0~0.5 s时,投入3 000 W+1 500 var,在0.5~1 s,再投入3 000 W+1 500 var,图12-17为采取两种不同控制策略的仿真波形。

图12 有功功率输出对比图Fig.12 Comparison diagram of active power output
采用反下垂控制策略时,由图12(a)可知,在0~1 s内,逆变器1有功功率占比约为55%,逆变器2有功功率占比约为45%,功率分配误差为11%,因线路虚拟阻抗不等、逆变器之间功率分配不合理,随着负荷功率等级升高,虽分配误差率不变但分配误差变大;由图13(a)、图14(a)可知,微网启动和负荷变动时无功功率和频率需较长时间(5个工频周期)过渡,同时因无功功率控制环节存在积分项且频率为全局量,无功功率将出现均分,同时频率因Q-f下垂特性出现偏移;由图15(a)可知,因系统内有功功率未实现均分,系统内无功换流仍较大;由图17(a)可知,因逆变器的下垂控制为有差调节,逆变器之间电压仍存在差值与电压跌落现象。

图13 无功功率输出对比图Fig.13 Comparison diagram of reactive power output

图14 系统环流对比图Fig.14 Comparisondiagramof circulationcurrent of system

图15 频率对比图Fig.15 Comparison diagram of frequency

图17 输出电压幅值对比图Fig.17 Comparison diagram of output voltage amplitude
采用U-I下垂控制策略时,通过引入虚拟电阻使逆变器总阻抗差异减小,进而使逆变器总阻抗近似相等。在0~1 s内,由图12(b)、图13(b)可知,逆变器1有功功率和无功功率占比约为51%,逆变器2有功功率和无功功率占比约为49%,功率分配误差率为1.1%,因引入虚拟电阻对有功功率和无功功率进行共同调节,故逆变器1和逆变器2的无功功率同有功功率分配效果一致,且虽分配误差会受负荷功率等级影响而增大,但误差仍在可接受范围内;由图14(b)、图16可知,逆变器1和逆变器2的频率为固定值,不会随负荷变化而改变,并且电压相位保持一致,实现了微网的同步运行和定频;由图15(b)可知,因有功功率和无功功率实现合理均分,逆变器之间环流极小;由图17(b)可知,因虚拟电阻造成电压跌落,逆变器电压会大幅度降低,但未超出电压允许范围,且通过添加幅值补偿环节,完全弥补了虚拟电阻产生的压降,补偿后的电压波形图如图17(c)所示。
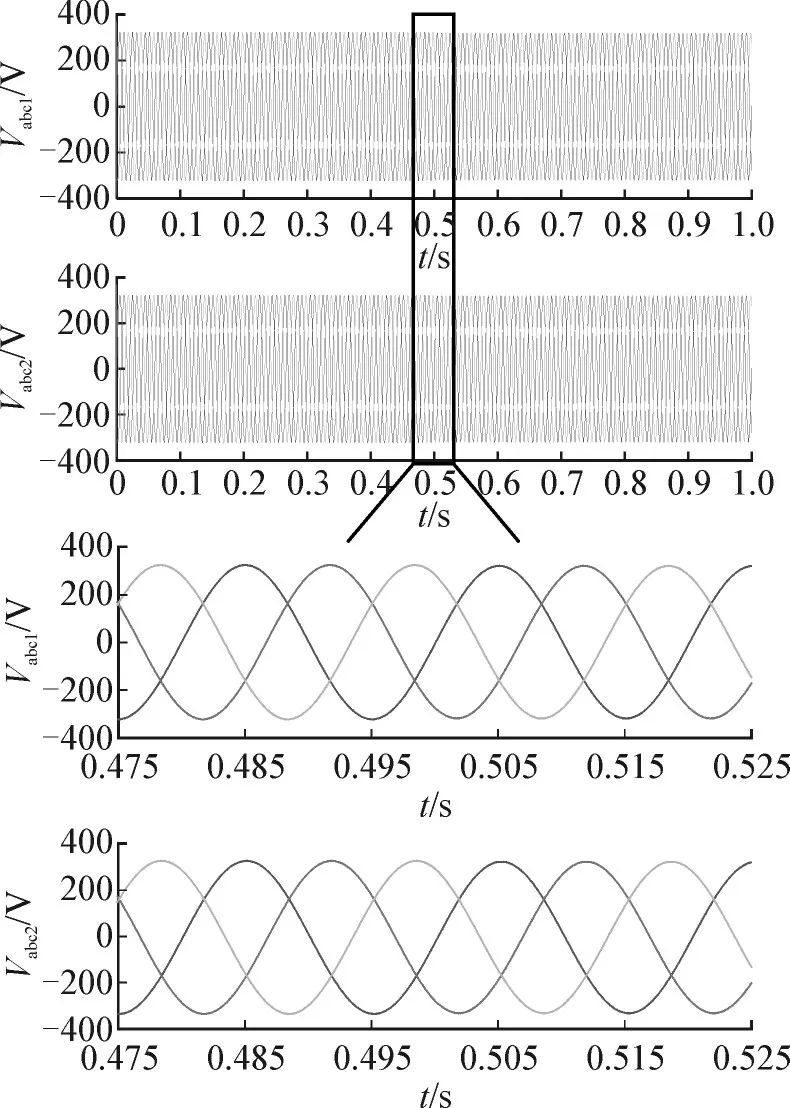
图16 电压相位同步图Fig.16 Voltage phase synchronization diagram
4 结语
本文通过两台逆变器并联系统模型分析了逆变器并联系统的环流特性和功率分配原理,并针对反下垂控制的不足,提出一种同步定频微网功率均分控制策略,有关结论如下:
1)微网内各逆变器之间功率不均分的根本原因是电压幅值、电压相位和线路阻抗之间存在差异。
2)采用GPS的1 pps信号保持使微网逆变器的输出电压相位一致且频率固定(50 Hz),实现了微网内各逆变器的同步运行,有利于实现功率均分。
3)以虚拟电阻作为下垂系数的U-I下垂控制策略有效地减少线路阻抗差异对功率分配的影响,且综合考虑电压稳态精度和功率均分效果,给出了虚拟电阻选取原则,其选取原则简单实用,有利于工程应用;并引入幅值反馈环节消除虚拟电阻造成的压降,大大地提升了输出电压质量。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
粮食问题研究(2022年2期)2022-04-25
时代文学·上半月(2022年1期)2022-01-15
中国新技术新产品(2018年22期)2018-01-05
中学数学杂志(初中版)(2017年4期)2017-08-28
筑路机械与施工机械化(2016年12期)2017-01-13
儿童故事画报·智力大王(2016年6期)2016-09-14
企业文化·中旬刊(2015年11期)2016-03-09
现代电子技术(2014年16期)2014-08-20
