柔性磁性薄膜材料与器件研究进展*
2022-05-26 09:18杨华礼谢亚丽芦增星汪志明李润伟
物理学报 2022年9期
杨华礼 谢亚丽 芦增星 汪志明 李润伟
(中国科学院宁波材料技术与工程研究所,中国科学院磁性材料与器件重点实验室,宁波 315201)
近年来,随着物联网、仿生机器人、移动式医疗健康等领域的兴起,柔性电子材料和器件受到广泛关注.基于磁性材料构建的传感器和存储器是电子器件的重要组成部分.随着柔性薄膜材料制备技术的发展,人们已经制备出高质量的柔性乃至可拉伸的磁性金属和氧化物薄膜,它们展现的不仅是更强的变形能力,还有新的物理效应与响应规律.研究结果表明,柔性磁电子器件在非接触传感、高灵敏应变探测、超分辨触觉感知等方面展现出独特的优势,具有广阔的应用前景.本文主要从柔性磁性材料的制备、物性调控规律和器件应用方面综述这一新兴领域的发展动态,并对其未来的发展趋势进行展望.
1 前言
物联网技术、可穿戴和可植入技术的快速发展对电子器件提出了柔性化的需求.柔性电子器件中的电子元件—如光电子元件、磁电子元件、储能元件等—具有可变形、轻便易携、可与复杂曲面共形贴附等独特优势,在智能机器人、人机交互、健康医疗等领域引起广泛关注[1−9],柔性电子材料和技术正逐步成为国际高科技领域竞争的重要阵地.众所周知,磁性材料是一类重要的功能材料,在驱动、能量转换、信息传感、信息处理、信息存储等领域具有广泛应用,其中磁性薄膜材料和器件是实现信息存储和传感的重要载体[10−12].实现磁性薄膜器件的柔性化,其前提是掌握柔性磁性薄膜的制备技术.与在刚性衬底上制备磁性薄膜不同,在柔性衬底上生长磁性薄膜不仅需要考虑两者之间的界面状态,还需要充分认识薄膜所受的应力状态,这主要是因为柔性衬底带来的应力/应变会引起磁性薄膜磁各向异性[13]、微观磁畴[14,15]、磁有序态[16]、电输运[17,18]等发生变化,进而影响器件性能.以磁性材料的重要内秉参量——磁各向异性为例,在柔性状态下,受磁弹耦合效应的影响,应力会导致磁性薄膜中磁各向异性的改变,并带来巨磁电阻器件电阻状态的变化和微波器件工作频率的漂移等不利影响.可见,研究应力/应变对柔性磁性薄膜磁性和电输运性质的影响规律和内在机制至关重要.在应用上,为了获得性能稳定的柔性磁存储器和磁传感器,需要避免器件受到应力/应变影响,通过优化器件制备工艺和改进器件结构设计可以使器件在形变过程中保持性能稳定.另一方面,利用磁传感器件对应力的敏感特性,可以为探测应力提供一种全新的方案,也在很大程度上拓展了柔性磁性薄膜的应用范围.
图1 展示了当前柔性磁性薄膜材料和器件的主要研究内容,包括柔性磁性薄膜的制备方法、应力对柔性磁性薄膜的调控规律、柔性磁性器件的功能设计、柔性磁电子器件的应用等[19−27].本文将主要从这4 个方面进行综述,第1 部分主要介绍应力/应变对柔性磁性材料宏观磁各向异性、微观磁畴、磁共振特性、其他物性的调控规律;第2 部分主要介绍柔性磁性薄膜材料的制备技术,如何获得在应力/应变下具有稳定磁各向异性的柔性薄膜是这部分关注的重点;第3 部分主要概述柔性器件在磁传感和应力探测方面的应用.最后,从柔性磁性薄膜力-磁耦合规律探索、柔性磁性薄膜器件制备和应用等方面对未来的发展进行展望.
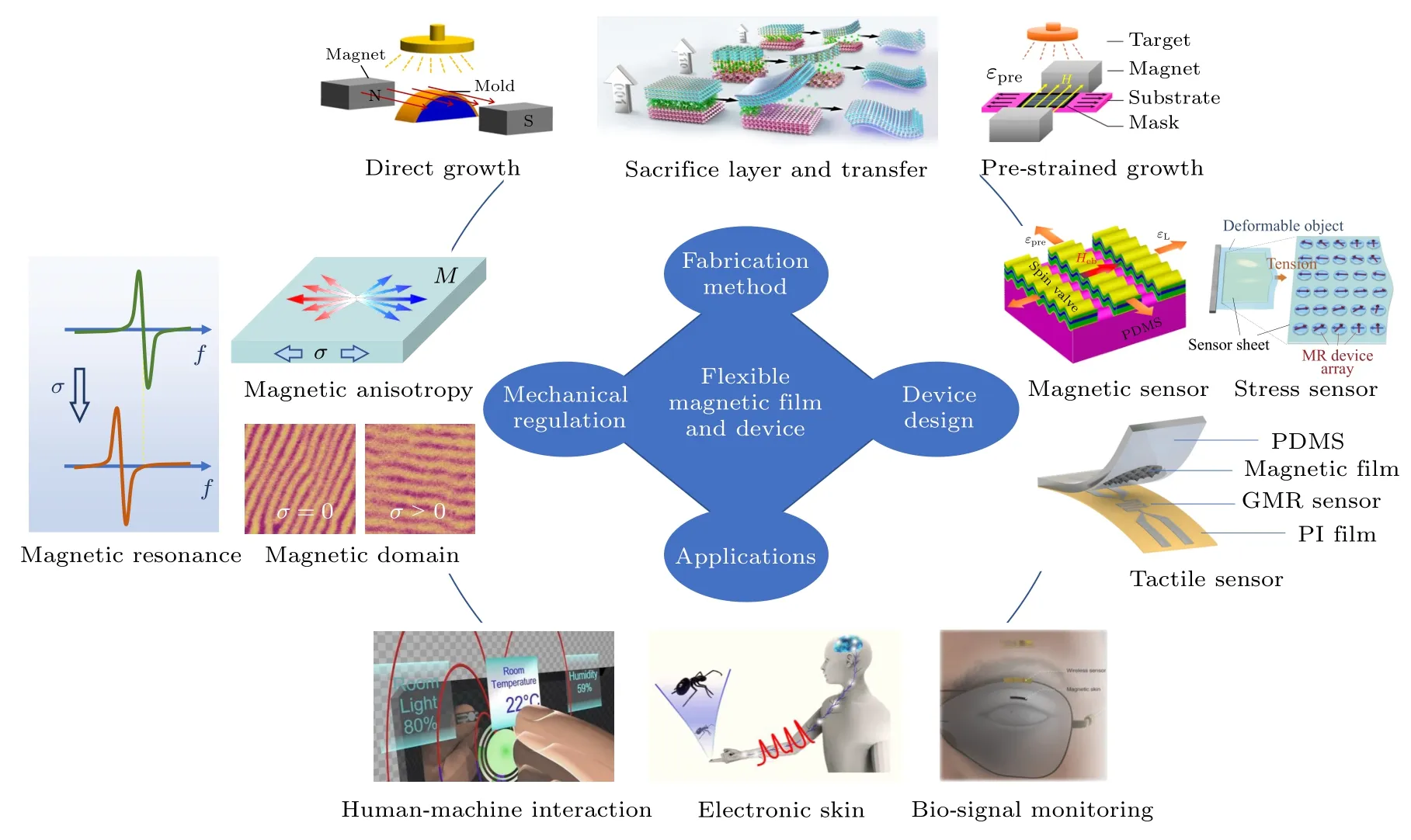
图1 柔性磁性薄膜和器件的主要研究内容:包括柔性磁性薄膜制备方法(直接生长法[19]、牺牲层+转移法[20]、预应力生长法[21]等)、应力调控规律(对磁各向异性、磁共振、磁畴[22]等的调控)、柔性磁性功能器件设计(磁传感器[21]、应力传感器[23]、触觉传感器[24]等)、器件应用(人机交互[27]、电子皮肤[25]、生理信号监测[26]等)Fig.1.Research topics of flexible magnetic films and devices.The topics include the fabrication methods (such as direct growth method[19],sacrifice layer and transfer method[20],pre-strained growth method[21],etc.);the strain modulation properties (of magnetic anisotropy,magnetic resonance,and magnetic domain[22],etc.);the design of flexible functional devices (such as magnetic sensors[21],stress sensors[23],and tactile sensors[24],etc.);as well as its applications (in human-machine interface[27],electronic skin[25],and bio signal monitoring[26],etc.).
2 应力/应变对磁性薄膜的调控规律
磁电子器件的性能与材料的物理性质密切相关.对于磁性材料,这些物理性质包括磁有序温度、磁各向异性、饱和磁化强度、自旋极化率等;非磁性材料的自旋-轨道耦合强度、电子结构特征在一些自旋电子学器件中也极其重要.当前,应力/应变对柔性磁性薄膜磁各向异性的调控规律研究受到广泛关注.磁各向异性是指磁性材料的能量依赖于磁化的方向,因而沿着不同方向使材料磁化到饱和所需的磁场大小不同的现象.磁各向异性不仅决定着磁性材料的磁矩、矫顽力、磁畴特征,也影响着磁性薄膜的高频响应特征,对器件的性能、工作频率乃至功耗都带来影响.磁各向异性主要包括磁晶各向异性、形状各向异性、磁弹各向异性、界面各向异性、感生各向异性等.受磁弹各向异性的影响,磁性薄膜受到的应力会导致其磁各向异性的变化.因此,研究柔性磁性薄膜中应力/应变对磁各向异性的调控规律和机制显得尤为重要.本节先综述应力/应变对柔性铁磁薄膜的调控规律,包括对磁各向异性、磁共振特性、磁畴的影响,然后介绍应力/应变对柔性反铁磁薄膜调控规律的研究进展,最后介绍应力/应变对柔性磁性薄膜结构中其他物理量的调控.
2.1 应力/应变对柔性铁磁薄膜的调控规律
2.1.1 对磁各向异性的调控
2012 年,Dai 等[13,28]在柔性衬底聚对苯二甲酸乙二醇酯(PET)上制备出性能优异的FeGa 薄膜.他们利用具有不同曲率半径的模具,通过弯曲柔性PET 衬底给FeGa 施加不同应力,实现了应力对FeGa 薄膜磁各向异性的调控.研究结果表明,当拉应力垂直于薄膜易磁化轴施加时,FeGa薄膜的易磁化轴可以被调控成难磁化轴(图2(a));当拉应力平行于薄膜易磁化轴施加时,沿着薄膜的难磁化轴施加磁场会更难达到磁化饱和(图2(c)).对于压应力而言,当压应力垂直于薄膜易磁化轴施加时,沿着薄膜的易磁化轴方向施加磁场更容易达到磁化饱和(图2(b));当压应力平行于薄膜易磁化轴施加时,薄膜的难磁化轴逐渐被调控成易磁化轴(图2(d)).考虑多晶薄膜中的易磁化轴存在角度分布,则FeGa 薄膜中单个晶粒的能量为:E=−Kuicos2(θ−δ)+Kecos2θ−MHcos(θ−φ),其中Kui为晶粒的磁各向异性能,Ke为磁弹各向异性能,θ为Ku与磁化强度M之间的夹角,φ为H与Ke的夹角,δ为Ku与Kui的夹角(忽略了Ku与Kui在数值上的微小差异).他们通过Stoner-Wohlfarth模型模拟了磁滞回线的测试结果,从理论上对应力调控的单轴磁各向异性进行了定性的解释.同时,磁性薄膜的磁弹各向异性能Ke与磁致伸缩系数λ和应力σ之间满足关系:Ke=,通过不同应力下磁各向异性能的变化,可计算出薄膜的磁致伸缩系数.Cao 等[29]通过该方法计算出柔性FeGa薄膜的磁致伸缩系数约为80 ppm (1 ppm=10–6).由于磁滞回线测试时需保证施加的磁场平行于薄膜平面,因此弯曲状态会限制磁性薄膜的测试.为了避免该问题,Dai 等[30]将磁致伸缩 FeGa 薄膜沉积在预弯曲的PET 衬底上,当将薄膜从弯曲模具上拿下来恢复平整时,薄膜受到来自衬底的应力,同时可沿薄膜任意方向施加磁场进行磁滞回线测量.薄膜的面内转角磁滞回线测量结果表明,其难磁化方向始终沿着薄膜受压应力的方向,而易磁化方向沿着薄膜受拉应力的方向.
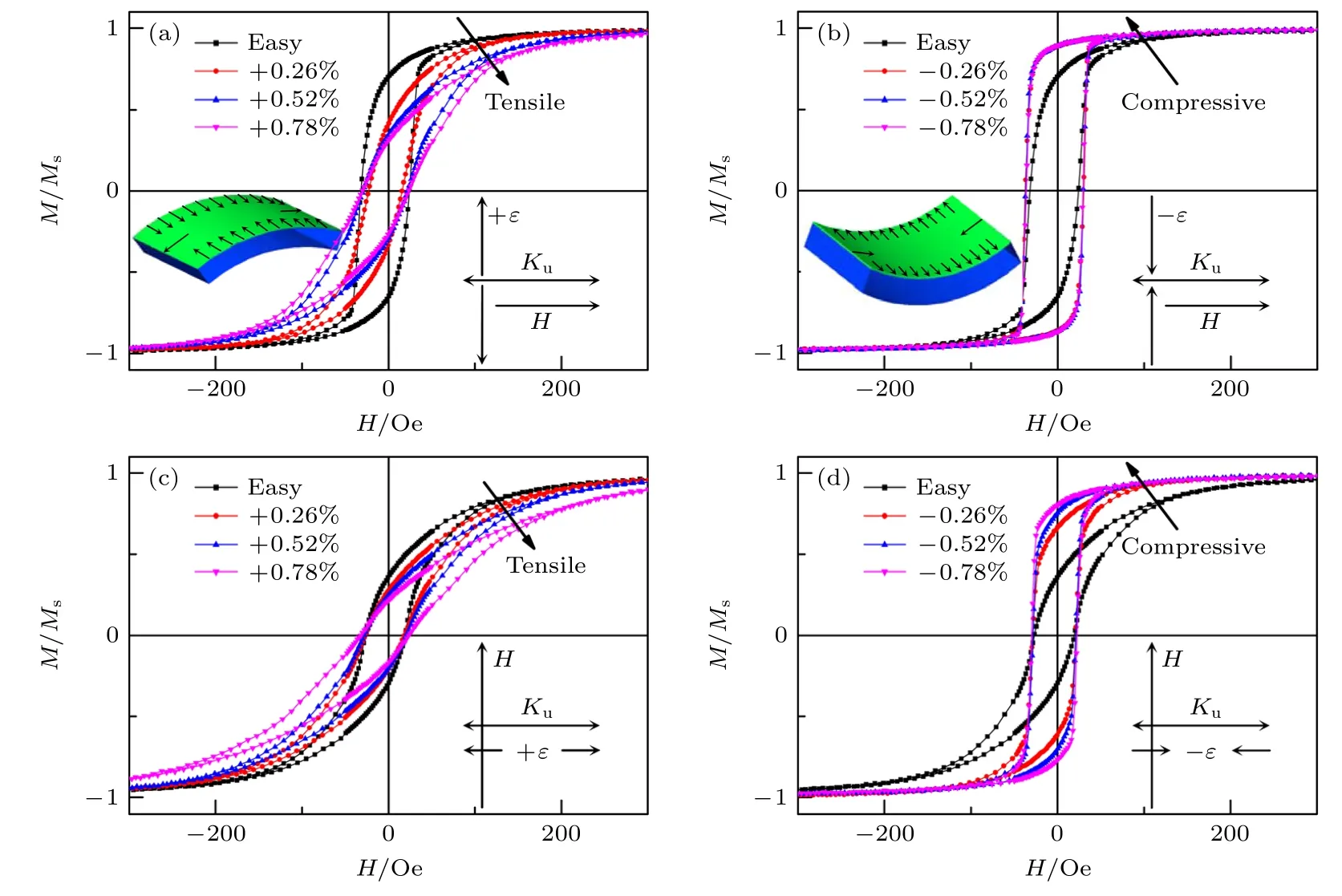
图2 不同测试构型下应变对FeGa 薄膜磁滞回线的调控规律(1 Oe=103/(4π) A/m)[13] (a)磁场H 平行于易磁化轴Ku,拉应变+ε 垂直于易磁化轴Ku;(b) H 垂直于Ku,拉应变+ε 平行于 Ku;(c) H 平行于Ku,压应变–ε 垂直于 Ku;(d) H 垂直于Ku,压应变–ε 平行于KuFig.2.Stress-regulation of the magnetic hysteresis loops of FeGa films under various configurations[13]:(a) The magnetic field (H) in parallel with the easy axis (Ku) and tensile strain (+ε) perpendicular to Ku;(b) H perpendicular to Ku and +ε in parallel with Ku ;(c) H in parallel with Ku and compressive strain (–ε) in parallel with Ku;(d) H perpendicular to Ku and–ε in parallel with Ku.
通过施加应力调控磁各向异性的柔性薄膜材料还包括:1)其他柔性金属薄膜如CoFeB 薄膜[31]、Fe、Co、Ni 薄膜[32]和NiFe 薄膜[33];2)具有垂直磁各向异性的磁性薄膜如Pt/Co 多层膜、TbFeCo薄膜等;3) CoFe2O4(CFO)等柔性磁性氧化物薄膜[34,35].在CoFeB 薄膜、Fe 薄膜和Co 薄膜等具有正磁致伸缩系数的薄膜中,应力对薄膜磁各向异性的调控规律与在柔性FeGa 薄膜中观察到的一致.而在具有负磁致伸缩系数的Ni 薄膜中,应力对磁化轴的调控规律与FeGa 薄膜的相反.例如,Asai 等[36]在柔性聚萘二甲酸乙二醇酯(PEN)上沉积了Ni 薄膜,通过磁电阻测量发现,在拉应力作用下Ni 薄膜的磁矩转向垂直于拉应力施加的方向.对于具有零磁致伸缩效应的NiFe 薄膜,应力对其磁各向异性基本没有影响[33].具有垂直磁各向异性的磁性薄膜对开发高密度和高稳定性的自旋电子学器件意义重大.Ota 等[37]研究了具有垂直磁各向异性的柔性TbFeCo 和Pt(2 nm)/Co(0.4—0.9 nm)/Pt(2 nm)薄膜在不同应变下的磁性变化规律.他们通过Hall 测量发现,随着面内单轴拉伸应变从0%逐渐增大到2%,TbFeCo 薄膜的易磁化轴从垂直于薄膜平面可逆地转变到沿着薄膜面内方向.与之不同,在施加2%的面内拉伸应变下,Pt/Co/Pt 柔性薄膜依然保持着垂直磁各向异性.他们通过改变Co 层的厚度,拟合出Pt/Co/Pt 薄膜垂直磁各向异性的界面贡献和体贡献,发现应力主要改变了薄膜的体各向异性而非界面各向异性.Zhao 等[38]在柔性云母衬底上构建了Pt/Co(1 nm)多层膜,发现在拉应力作用下,Ta/(Pt/Co)2/Pt 多层膜的垂直磁各向异性发生增强,其剩磁比从0.35 提高到0.66.Matsumoto 等[39]在柔性PEN 衬底上制备了Pt/Co(1.5 nm)和Pd/Co(0.9 nm)薄膜,通过对比面内单轴拉应力和双轴应力对Co 薄膜磁各向异性的调控规律,发现双轴应力对薄膜的垂直磁各向异性的调控更为显著,在2%双轴应变的作用下,薄膜从面内磁各向异性转变为垂直磁各向异性.在柔性磁性氧化物中,Gao 等[34]在柔性云母衬底上制备了(111)取向的Co0.8Fe2.2O4外延薄膜,发现无论薄膜处于拉伸还是压缩状态时,其饱和磁化强度增大而矫顽场减小,这种效应被认为与应力作用下八面体的旋转引起的磁晶各向异性改变有关.Ha 等[35]发现在CoFe2O4/CoO 双层膜中,拉应力使得CoFe2O4薄膜表面发生电荷重分布,进而在CoFe2O4薄膜中诱导出磁性相的分离.这些现象也表明应力作用下氧化物磁性的变化相较金属薄膜而言更加复杂.
为了定量表征应力对磁各向异性的调控规律,Wen 等[40]利用输运测试研究了应力对柔性CoFeB薄膜磁各向异性的调控规律.他们在柔性聚偏氟乙烯(PVDF)衬底上沉积了CoFeB 薄膜,并且利用PVDF 的各向异性热膨胀特性,通过改变温度对薄膜施加面内的单轴应力.所施加的应力大小σ与温度变化量ΔT成正比:σ=(α31−α32)×ΔT×Ef/(1−ν2),其中α31和α32表示PVDF 沿面内不同方向的热膨胀系数,Ef为薄膜的杨氏模量,ν为PV DF 的泊松比.通过各向异性磁电阻测量可建立外加磁场方向θH与薄膜磁矩方向θM的关系(图3(a)和图3(b)),进而可获得薄膜的磁扭矩:L(θM)=µ0MSHsin(θH−θM)(图3(c)).对于具有单轴各向异性的磁性薄膜,其在外磁场作用下单位面积的能量可表示为:E=Kusin2θM−µ0MSHcos(θH−θM).根据平衡态时的条件∂E/∂θM=0,可以建立L(θM)与各向异性常数Ku的关系:L(θM)=Kusin(2θM),进而计算Ku的数值.基于该方法,他们获得了不同应力下CoFeB 薄膜Ku的变化(图3(d)),并计算出其磁弹各向异性常数的应力系数约为1.7×105erg·cm–3·GPa–1(1 erg=10–7J).利用相同的方法,Chen 等[41]测量了多晶Fe,Co,Ni 薄膜磁弹各向异性常数的应力系数,其数值分别为6.3×103,2.7×104,2.5×105erg·cm–3·GPa–1.该工作对于定量计算柔性磁性薄膜的应力相关特性具有重要意义,也为设计柔性磁敏感器件提供了参考.
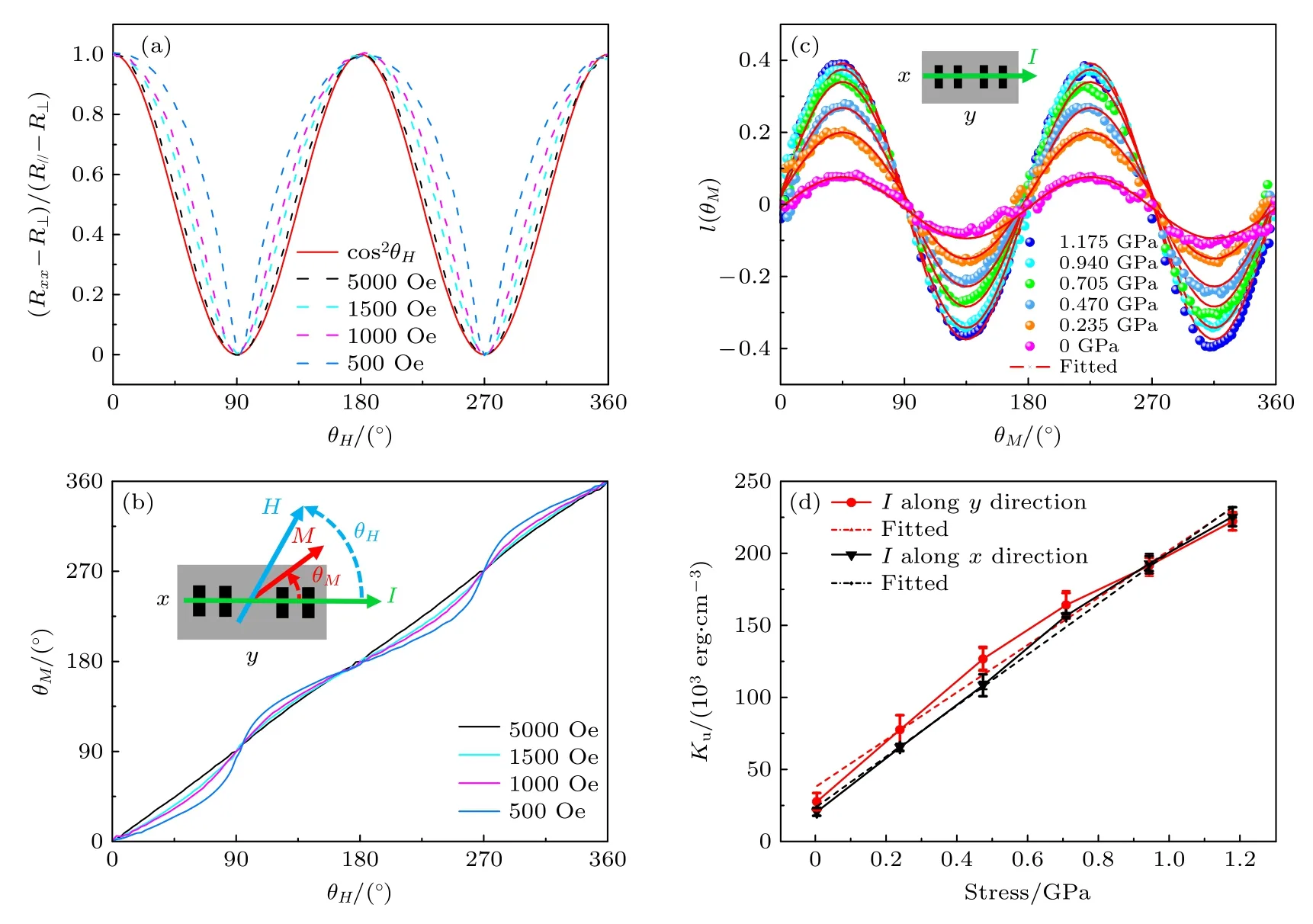
图3 应力对CoFeB 薄膜磁弹各向异性的调控规律[40] (a)薄膜在不同磁场下的各向异性磁电阻测量曲线;(b)不同磁场下θH 和θM 的角度关联曲线;(c)不同应力下薄膜的归一化扭矩曲线;(d)磁弹各向异性常数随应力的依赖关系Fig.3.Stress-modulation of the magnetic anisotropy of CoFeB films[40]:(a) The anisotropic magnetoresistance curves under various magnetic field strength;(b) correlation of θH and θM at different magnetic fields;(c) normalized torque curves of the film at various stress;(d) dependence of the magnetoelastic anisotropy constant on external stress.
图4 总结了应变状态下一些柔性磁性薄膜各向异性变化的数值规律[30,37,39−43].首先,对大部分磁性金属和氧化物薄膜而言,应变引起的磁各向异性变化都是显著的.其次,不同材料在应变下的磁各向异性变化存在差异.例如,在相同的应变下,Fe,Co,Ni 薄膜的磁各向异性能变化逐渐增大.第三,具有垂直磁各向异性的金属薄膜和氧化物薄膜,其应变下的垂直磁各向异性变化趋势也不同,例如,在拉伸应变作用下Co 薄膜的垂直磁各向异性得到增强,而钡铁氧体(BaM)等氧化物薄膜的垂直磁各向异性则是减弱的.第四,通过结构设计,可以极大地提高薄膜磁各向异性的应变稳定性能.例如,CoFeB 薄膜在0.5%的应变下,其磁各向异性的变化高达2×105erg/cm3,且通常只能承受不超过2%的应变;如果将其设计成具有褶皱结构的CoFeB 薄膜,那么薄膜可承受超过50%的应变且其磁各向异性变化低于104erg/cm3.可见,结构设计是提升薄膜可拉伸性能的重要途径.
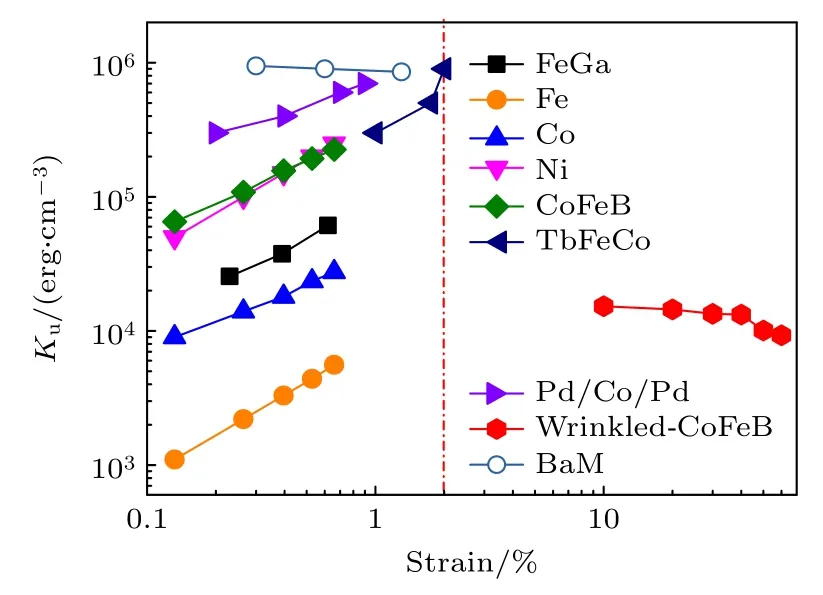
图4 应变对FeGa[30],Fe,Co,Ni[41],CoFeB[40],TbFeCo[37],Pd/Co/Pd[39],褶皱结构CoFeB[42],BaM[43]薄膜磁各向异性能的调控效果.其中,褶皱结构CoFeB 的磁各向异性能由文献[42]估算.虚线代表普通块体金属的断裂拉伸应变极限Fig.4.Regulation of the magnetic anisotropy by external strain in FeGa[30],Fe,Co,Ni[41],CoFeB[40],TbFeCo[37],Pd/Co/Pd[39],wrinkled CoFeB[42],and BaM[43].The magnetic anisotropy of wrinkled CoFeB was estimated from Ref.[42].The vertical dashed line stands for the maximum tensile strain without crack in bulk metals.
2.1.2 对磁共振特性的调控
磁各向异性的改变同时也将伴随磁共振行为的变化.以柔性FeGa 薄膜为例,Yu 等[44]对柔性FeGa 薄膜在不同应力下的磁谱进行了测量并利用Landau-Lifshitz-Gilbert 方程对磁谱数据进行了拟合,发现随着压应变从0%增大到0.78%,薄膜的初始磁导率从69 下降到17,而磁谱共振峰从4.6 GHz 相应增大到5.3 GHz.同时薄膜的反射损耗也随应力发生变化.Liu 等[42]在预拉伸应变为30%和50%的柔性聚二甲基硅氧烷(PDMS)衬底上制备了褶皱结构的CoFeB 薄膜,发现随着拉伸应力的施加,薄膜的起始磁化率增大到原来的两倍以上,共振频率降低约1 GHz;在经过1000 次以上的循环拉伸后,薄膜的性能基本不发生变化.在柔性氧化物磁性薄膜中,Liu 等[45,46]将Li0.35Zn0.3Fe2.35O4和CuFe2O4等外延薄膜沉积到柔性云母衬底上,发现应力可以显著调控其铁磁共振场.在柔性CuFe2O4薄膜中,拉应力作用下其铁磁共振场逐渐降低,拉应力作用下铁磁共振场逐渐增大[46].这些研究为构建柔性且共振频率可调的器件奠定了良好的基础,在微波发生器、微波探测器、谐振器等器件中有潜在应用.
2.1.3 对磁畴的调控
磁畴是磁性材料的基本单元,研究应力下磁畴结构的变化,不仅对理解磁性材料的内在磁相互作用具有重大意义,也会为提高柔性磁电子器件的性能奠定基础.Peng 等[47]研究了应力作用下FeCoSi B 非晶薄膜的磁畴演化,发现随着拉应力增大,磁畴从非规则结构逐渐变成与应力方向平行的条带结构,并且随着应力的进一步增大,磁畴的衬度逐渐变弱直至消失.Karboul-Trojet 等[48]在柔性聚酰亚胺(PI)衬底上制备了具有条纹畴结构的NiFe薄膜,发现施加大小150 Oe 的面内磁场可以使薄膜达到磁化饱和,从而使条纹畴衬度消失;此时如果沿磁场方向施加拉应力,则条纹畴会重新出现.Dai 等[22]研究了柔性FeGa 薄膜在应力作用下的条纹畴演化规律,发现在拉(压)应力作用下磁畴条纹平行(垂直)于该应力方向,如图5(a)所示.Zhang 等[49]通过电子束刻蚀在柔性聚甲基丙烯酸甲酯(PMMA)衬底上制备出具有不同图案的沟槽然后生长Ni 薄膜,发现沟槽会对薄膜应力释放产生影响,从而获得具有不同图案的磁畴结构(图5(b)).这种通过微观应力图案化调控微观磁畴分布的方法为设计磁性微纳器件提供了良好的思路.Yang 等[50]在柔性云母衬底上制备了Ta/CoFeB/TaOx/MgO/Ta 薄膜,薄膜在一定大小的外磁场作用下产生稳定的斯格明子,并且发现可以通过应力和电压对薄膜界面的Dzyaloshinsky-Moriya 相互作用进行很好地调控.
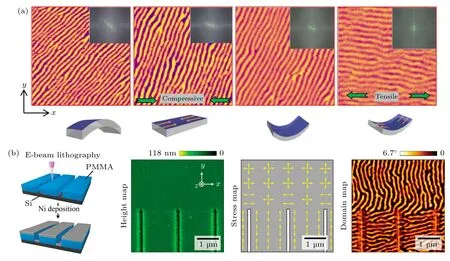
图5 (a)不同应力状态下FeGa 薄膜的磁畴结构[22],从左到右分别表示FeGa 薄膜样品在凸模具上(未取下)、从凸模具上取下并展平、在凹模具上(未取下)、从凹模具上取下并展平时的磁畴结构;(b)通过电子束刻蚀控制Ni 薄膜应力,调控微区磁畴结构[49],从左到右分别表示样品制备过程、薄膜形貌、微区应力示意图、磁畴结构Fig.5.(a) Magnetic domain structure of FeGa film with different stress configurations[22] (from left to right):with FeGa film attached on a convex mold,removed from the convex mold and flattened,attach on a concave mold,removed from the concave mold and flattened;(b) modulation of the magnetic domain structure of Ni film with micro-patterned stress by E-beam lithography[49].The sample fabrication process,topography of the film,stress distribution,and magnetic domain structures are shown from left to right.
2.2 应力/应变对柔性反铁磁薄膜的调控规律
反铁磁材料是磁电子器件的重要组成部分.首先,反铁磁与铁磁界面形成交换偏置效应,使铁磁薄膜形成单向磁各向异性,被广泛应用在巨磁电阻器件中[51,52];其次,反铁磁没有净磁矩且其磁共振频率在太赫兹范围,被认为是实现高密度信息存储和太赫兹器件的重要材料.然而,由于反铁磁材料的净磁矩为零且对外磁场的响应微弱,因此难以用常规的磁测量手段进行表征,常借助交换偏置效应来间接表征应力对柔性反铁磁的影响规律.
交换偏置效应通常出现在具有特定条件(例如磁场生长、场冷处理等)的磁性异质结中[53−55].Zhang 等[56]将FeGa/IrMn 交换偏置异质结分别生长在Si 片和具有各向异性热膨胀特性的PVDF衬底上,发现其交换偏置场Heb随温度表现出不一致的变化规律,表明应力对该异质结的交换偏置效应产生影响.Zhang 等[57]发现在柔性FaGa/IrMn异质结中,当垂直于钉扎方向施加应力时,沿着钉扎方向测得的交换偏置场随着压应力的增大而显著减小,同时其剩磁比随着压应力的增大而增大.该结果表明IrMn 反铁磁层和FaGa 铁磁层的磁矩方向对外应力的响应不一致,导致反铁磁层对铁磁层的钉扎作用减弱,从而降低了交换偏置场.Sheng 等[58]对应力作用下铁磁/反铁磁交换耦合异质结的磁滞回线进行了分析(图6),他们推断如果应力对反铁磁没有影响,那么该异质结的交换偏置场的角度依赖关系将不发生变化,此时铁磁层磁各向异性可能受应力调控,导致磁滞回线的剩磁比发生改变(图6(b));如果应力引起反铁磁薄膜磁各向异性的改变,那么该异质结的交换偏置场的角度依赖关系将发生变化,同时,铁磁层磁各向异性可能受应力调控,导致磁滞回线的剩磁比发生改变(图6(c)).通过测量CoFeB/IrMn 交换偏置异质结在不同应力下的磁滞回线,发现在应力作用下薄膜磁滞回线的剩磁比和交换偏置场的角度依赖关系均发生变化(图7(a)—(c)).特别是,随着应力的施加,垂直于钉扎方向的交换偏置场逐渐增大(图7(d)),表明应力调控了IrMn 反铁磁的磁矩取向.通过细致测量和分析,获得了应力与反铁磁IrMn 薄膜面内磁矩排布方向之间的定量关系:沿钉扎方向施加2.26 GPa 压应力使得IrMn 的磁矩排布方向发生大约10°的角度转动.Zhang 等[59]通过弯曲模具生长薄膜的方式获得具有不同应力状态的FeCo/IrMn 交换偏置多层膜,发现当拉应力垂直于钉扎方向时,交换偏置场基本不变,而当压应力垂直于钉扎方向时,交换偏置场显著增大.Zhang 等[59]的结果同样表明应力使反铁磁的易磁化轴方向发生偏转,从而引起交换偏置场的变化.Shi 等[60]在柔性NiMn/Fe4N 外延异质结中也观察到应力引起的反铁磁各向异性重分布和交换偏置场调控现象.在一些柔性氧化物异质结薄膜中,有一些关于应力对交换偏置效应和反铁磁影响规律的讨论[61−63],但仍需进行更多研究.
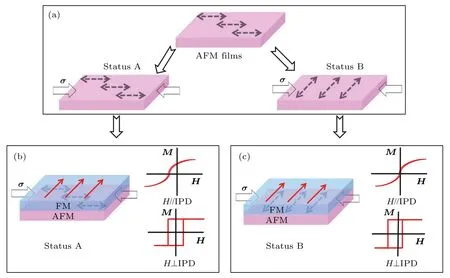
图6 通过交换偏置效应表征应力对反铁磁性的调控规律示意图[58] (a)应力平行于初始钉扎方向时对反铁磁磁矩调控的两种状态;(b)应力不影响反铁磁磁矩取向时,交换偏置异质结的磁滞回线特征;(c)应力改变反铁磁磁矩取向时,交换偏置异质结的磁滞回线特征Fig.6.Schematic diagram showing the stress modulation of antiferromagnetic films through the exchange bias effect[58]:(a) Two possible antiferromagnetic configurations under the influence of external stress applied parallel to the initial pinning direction (IPD);(b) the corresponding hysteresis loop of exchange bias structure with the direction of the antiferromagnetic moment unchanged;(c) the corresponding hysteresis loop of exchange bias structure with the direction of the antiferromagnetic moment rotated by 90°.
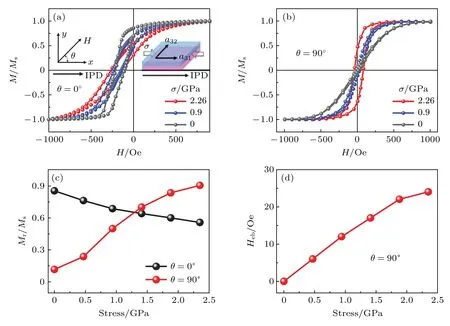
图7 应力对CoFeB/IrMn 交换偏置效应的调控规律[58] (a),(b)不同应力下,磁场沿着(a)和垂直于(b)钉扎方向时磁滞回线的变化;(c)磁场沿着钉扎方向和垂直于钉扎方向时,剩磁比随应力的变化规律;(d)磁场垂直于钉扎方向时交换偏置场随应力的变化规律Fig.7.Stress modulation of the exchange bias effect for the CoFeB/IrMnbilayers[58]:(a),(b) Typical hysteresis loops under different stress measured at θ=0° (a) and θ=90° (b) with the initial pinning direction (IPD) set along the x direction;(c) temperature dependence of Mr/Ms measured at θ=0° and 90°;(d) stress dependence of Heb measured at θ=90°.
2.3 应力/应变对柔性磁性薄膜其他物性的调控
应力/应变不仅仅会影响柔性磁性薄膜的磁各向异性、磁畴、磁共振特性,还可以引发磁相变、改变居里温度、诱导金属-绝缘体相变、改变电荷流-自旋流转换效率等.例如Du 等[64]将反铁磁Heusler合金GdPtSb 薄膜转移至柔性有机衬底上,通过设计褶皱结构,诱导出了铁磁性.Ling 等[65]将Ni-Mn-Sn 薄膜沉积在柔性云母衬底上,发现应力使得薄膜的居里温度、磁相变温度、交换偏置场起始温度均提高了近10 K.Hong 等[66]将自支撑的La0.7Ca0.3MnO 薄膜转移至柔性衬底上并进行了应力调控,发现在8%的单轴应变和5%的双轴应变下La0.7Ca0.3MnO 薄膜发生了从铁磁金属态向反铁磁绝缘态的转变.Liu 等[67]在柔性云母衬底上制备了Ta/Fe/Pt 多层膜,通过自旋扭矩-铁磁共振(ST-FMR)测量发现在6.26‰的压应变作用下,其自旋霍尔角从约0.12 提高至约0.20.Wong 等[68,69]将Pt/Co 沉积在柔性PI 衬底上,发现其自旋霍尔效率在拉应力作用下增大,而Gilbert 阻尼系数随拉应力的施加而减小.
3 柔性磁性薄膜的制备
磁性材料的种类繁多(包括金属、合金、化合物、氧化物等),制备条件具有多样性(如高温、磁场、拉伸等条件),给柔性磁性薄膜的制备带来了一定挑战,也促使人们不断发展制备柔性磁性薄膜的新技术.表1 列出了一些磁性薄膜和器件的拉伸性能[21,39,43,66,70−73].可以发现,随着薄膜制备技术的提升,柔性磁性薄膜正朝着更高的拉伸极限和更好的多向拉伸能力等方面发展.这些性能的提升也为柔性磁性薄膜在可拉伸电子器件方面的应用提供更好的材料基础.
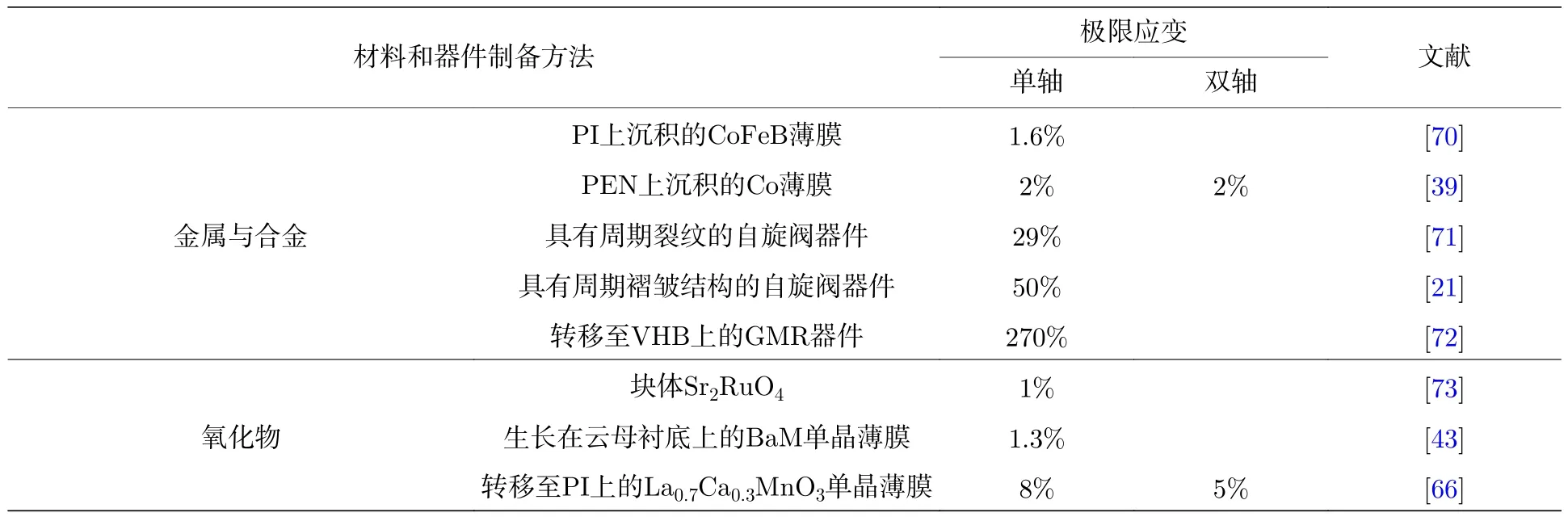
表1 部分磁性薄膜和器件的拉伸性能比较Table 1. Stretchability of selected magnetic films and devices.
3.1 柔性金属磁性薄膜的制备
柔性金属磁性薄膜的制备主要有两种方法,一是通过牺牲层法获得自支撑的磁性薄膜,然后转移至柔性衬底上[74];二是直接在柔性衬底上沉积薄膜.常见的柔性衬底包括PET,PVDF,PI,PDMS等,其中在PET 和PI 衬底上均可以直接生长出表面平整的磁性金属薄膜,PDMS 由于其杨氏模量远低于磁性金属,使得薄膜生长完成后其表面产生无规则的褶皱结构[71],不利于实际使用.受磁弹各向异性影响,柔性磁性薄膜的磁各向异性容易在变形情况下发生变化,使得器件的稳定性受到影响.以自旋阀器件为例,其钉扎层的磁矩保持稳定,而自由层在外磁场作用下发生偏转,从而实现对外磁场的探测,柔性化的自旋阀器件容易发生形变,进而可能引起自由层的磁矩发生改变,导致器件电阻态的漂移乃至失效.在更大的应力下,磁性金属薄膜会由于无法承受大的形变而产生裂纹[70].为此,需要探索使柔性磁性薄膜在应变下保持磁各向异性稳定的方法.
Dai 等[30]提出了一种对各向异性可调控的柔性磁性薄膜制备方法.其中柔性衬底(如PET)被贴附在具有不同弯曲半径的模具上,然后置于磁控溅射系统中进行多晶FeGa 薄膜的生长.镀膜完成后,将薄膜样品从模具中取出并展平,此时样品中产生一个单轴应力.图8 展示了薄膜展平后沿着y方向产生压应力的情形,受磁弹各向异性影响,因而薄膜的易磁化轴沿着x方向.可以预见,在一定范围的外加应力作用下,该薄膜的易磁化轴基本保持不变.
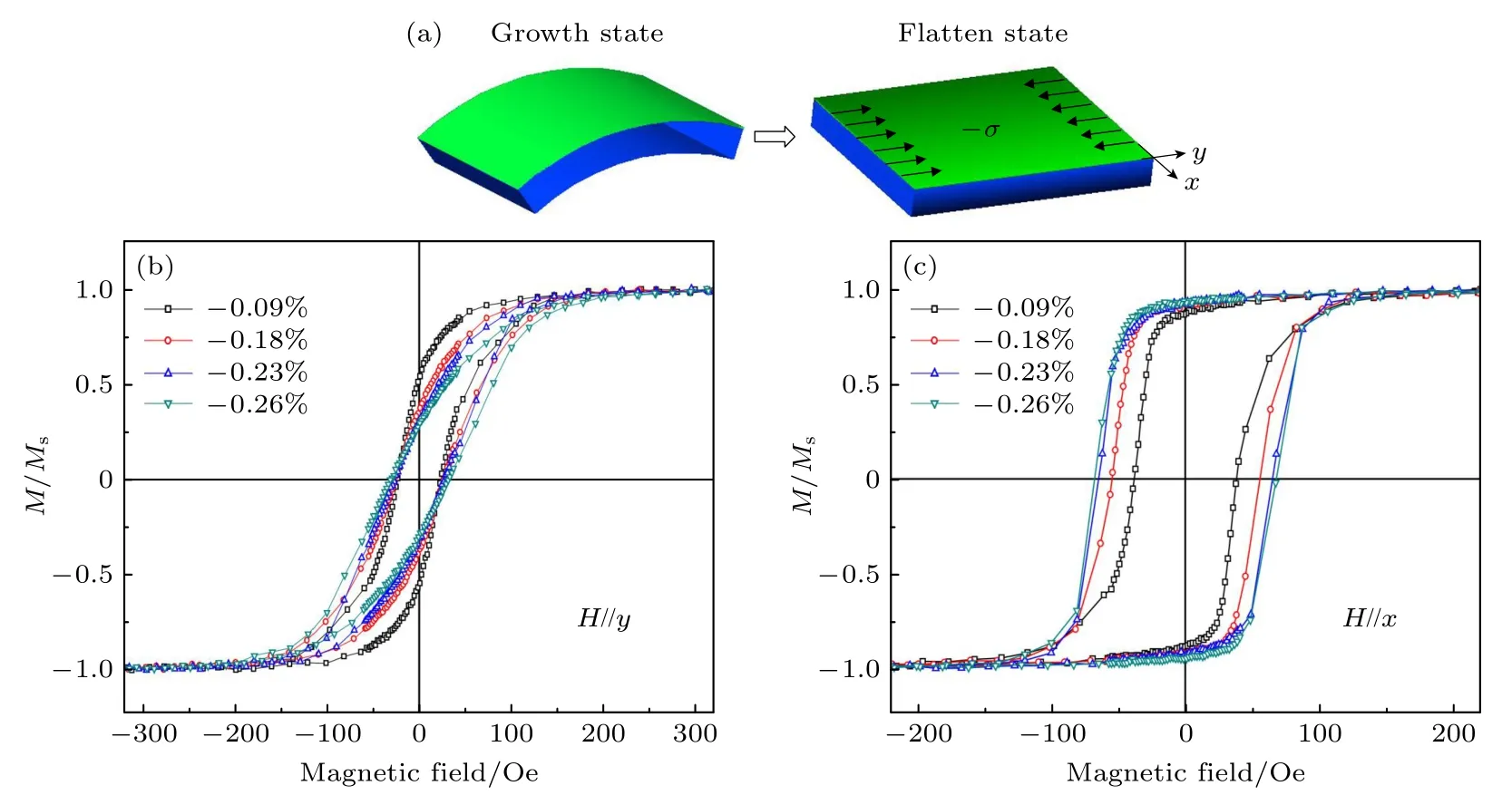
图8 磁各向异性可调控的柔性磁性薄膜制备方法[30] (a)薄膜的制备过程示意图;(b),(c)不同压应力下生长的薄膜沿着(b)和垂直于(c)压应力方向(y 方向)的磁滞回线曲线Fig.8.Preparation of flexible magnetic films with tunable magnetic anisotropy[30]:(a) Schematic diagram of the preparation process;(b),(c) magnetic hysteresis loops with magnetic field applied along (b) and perpendicular to (c) the compressive stress direction(y direction).
Qiao 等[19]设计了一种在更大应变下磁各向异性保持稳定的薄膜制备方案.如图9 所示,他们在聚酰亚胺衬底上同时弯曲衬底和施加磁场,制备了非晶的CoFeB 薄膜.该薄膜在展平状态下处于不同的应力状态,通过磁滞回线测量,建立剩磁比与薄膜应力的对应关系,可以发现,在1%的拉伸应变作用下,薄膜剩磁比从0.92 下降到0.43.对于正常制备的柔性薄膜(制备时衬底平整且不施加磁场),其剩磁比在1%的拉伸应变作用状态下从0.77 迅速下降到0.14.然而,通过这种方法获得的柔性薄膜其磁各向异性仅能在很小的变形变量下保持稳定.
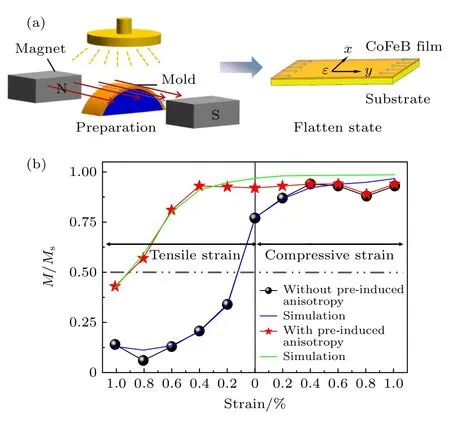
图9 应力稳定的柔性磁性薄膜制备方法[19] (a)薄膜的制备过程示意图;(b)所制备薄膜的矩形比随外加应力的变化关系(黑线为常规方法生长样品的对比数据)Fig.9.Preparation of flexible magnetic films with stress-invariant magnetic anisotropy[19]:(a) Schematic diagram of the fabrication process of CoFeB films with pre-induced magnetic anisotropy;(b) the strain dependence of Mr/Ms for CoFeB films grown with pre-induced magnetic anisotropy (data with films grown without pre-induced magnetic anisotropy are indicated as a comparison).
为了获得具有更大拉伸性能的磁性薄膜,需要通过结构设计来释放形变下柔性磁性薄膜的应力.最常见的办法是在弹性衬底上制备具有“褶皱结构”的磁性薄膜,其方法是:首先将弹性衬底产生一定的拉伸变形(称为预拉伸量),然后在预拉伸的弹性衬底上生长磁性薄膜,镀膜完成后释放弹性衬底的预拉伸形变,由于弹性衬底与磁性薄膜之间的杨氏模量存在巨大差异,此时样品将形成褶皱结构以释放预拉伸形变产生的应力.Zhang 等[75]对比了不同制备方法得到的褶皱薄膜带来的磁各向异性差异.他们发现,若预先将PDMS 衬底拉伸30%,待沉积完磁性薄膜(Ta/FeGa/Ta)后再释放衬底应力(图10(a)),薄膜的磁各向异性较弱(对60 nm薄膜,其磁各向异性能为3.08×103erg/cm3);反之,如果先拉伸PDMS 衬底长完金属缓冲层Ta 后释放衬底应力使其形成褶皱结构,再在其上生长磁性薄膜(FeGa/Ta)(图10(b)),则将得到磁各向异性较强的薄膜(对60 nm 薄膜,其磁各向异性能为1.28×105erg/cm3).通过倾斜溅射的方法,可以进一步提高薄膜的磁各向异性.例如,Li 等[76]通过倾斜溅射,将Fe60Co26Ta14薄膜沉积在预先诱导出褶皱结构的衬底上,发现薄膜的磁各向异性随着倾斜溅射角度的增加而增大.Zhao 和Guo 等[77,78]在PDMS 衬底上制备了具有周期褶皱结构的Fe10Co90薄膜,并发现在垂直于褶皱方向上施加拉伸应时,Fe10Co90薄膜的磁各向异性基本不发生变化.Wang 等[79]将NiFe/IrMn 生长在预拉伸的PDMS 衬底上形成褶皱结构,发现可以通过改变钉扎方向和单轴各向异性方向的夹角,来调控交换偏置场的角度依赖关系.
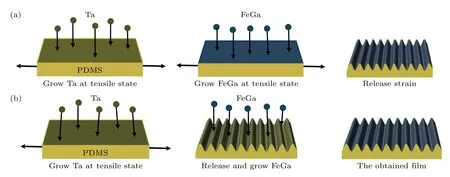
图10 具有周期性“褶皱结构”的柔性磁性薄膜制备方法[75] (a)保持拉伸状态生长磁性薄膜;(b)在诱导出褶皱结构的衬底上生长磁性薄膜Fig.10.Fabrication of flexible magnetic films with periodic wrinkled structures[75]:(a) Schematic diagram of growing FeGa film on a pre-strained substrate;(b) schematic diagram of growing FeGa film on a periodic wrinkled substrate.
3.2 柔性氧化物磁性薄膜的制备
复杂氧化物具有丰富的性能,其磁、电、力、热以及各种性质之间的耦合效应为实现柔性多功能电磁器件提供了新的契机[80−84].但是,制备高质量的柔性氧化物功能薄膜面临着一些挑战:首先,高质量氧化物的制备常常需要高温条件,大部分有机柔性衬底无法承受300 ℃以上的高温.其次,氧化物薄膜具有脆性,难以承受较大的形变.近年来,在柔性氧化物薄膜制备方法上取得了较大的突破,为柔性氧化物器件的制备打下了良好的基础.制备柔性氧化物的方法主要包括:范德瓦耳斯外延法、牺牲层法等,这些也是制备柔性磁性氧化物薄膜的重要方法.下面将主要对这些方法进行介绍.
3.2.1 范德瓦耳斯异质外延制备柔性磁性薄膜
以云母为例,它是一种层与层间通过范德瓦耳斯力结合的层状材料,当其厚度小于100 µm 时即表现出良好的柔性,同时云母还具有极高的熔点(1150—1300 K),被广泛用于多种柔性薄膜材料的生长和柔性器件的研究[85−89].此外,由于云母衬底和薄膜之间的弱相互作用,使得薄膜的晶格参数接近体相,使之保有体相良好的磁电性质.目前利用云母作为衬底,已经能够制备高质量的Fe3O4[90],CoFe2O4[86],SrRuO3[88],Pr0.5Ca0.5MnO3[18],VO2[91]等,有望被用于柔性可穿戴器件、柔性自旋阀等柔性磁电器件[84,85],如图11 所示.
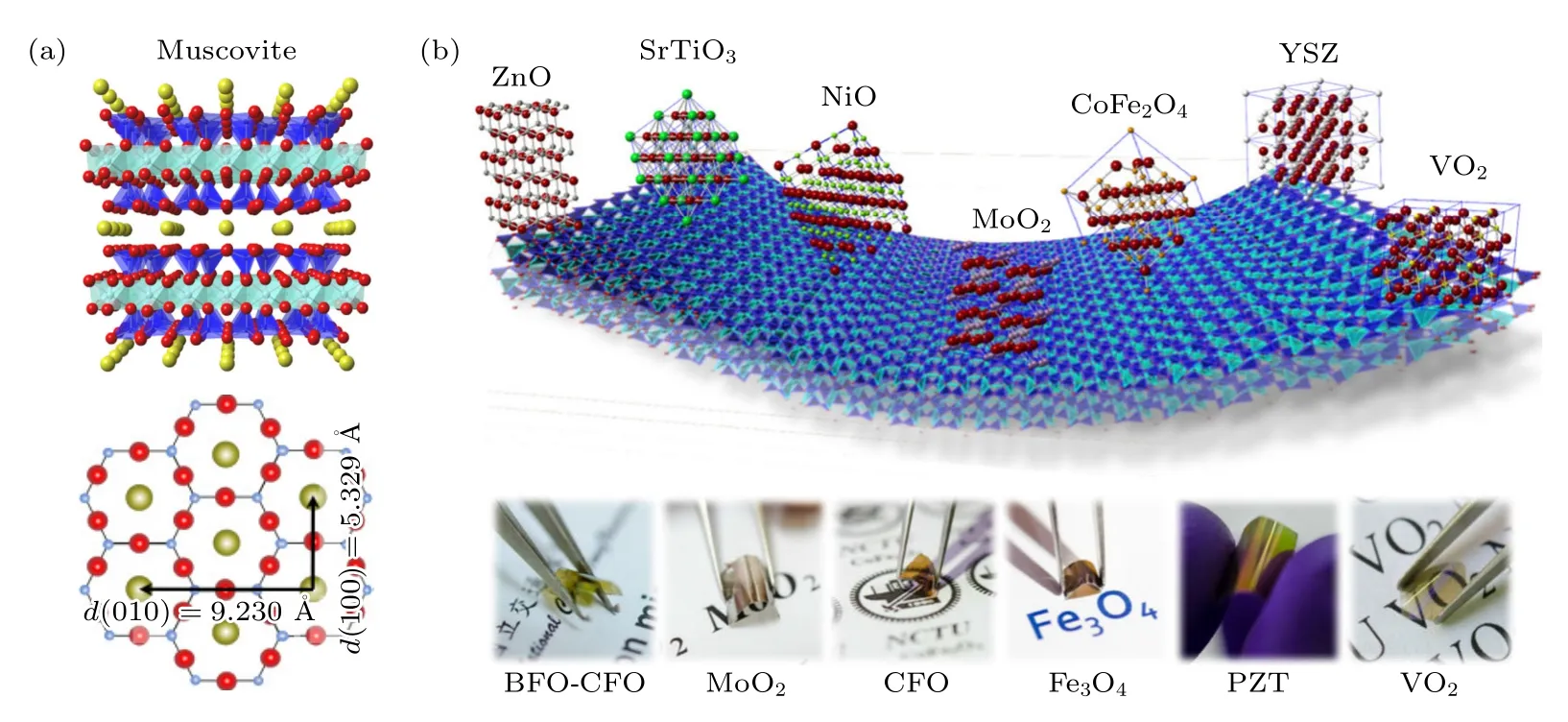
图11 (a)云母晶体结构以及沿(001)方向的晶格俯视图;(b)部分基于云母衬底柔性氧化物薄膜工作总结[84]Fig.11.(a) Crystal structure of mica and its lattice structure in the (001) plane;(b) a summary of typical flexible oxide films grown on mica substrate[84].
石墨烯是除云母外常用的范德瓦耳斯外延材料.2020 年,Kum 等[92]利用石墨烯作为中间层,制备功能层/石墨烯/SrTiO3的异质结构,直接剥离制备了包括SrTiO3,CoFe2O4,Y3Fe5O12在内的多种柔性自支撑氧化物薄膜.2021 年,Du 等[64]利用该方法成功制备了Heusler 合金GdPtSb.该方法适宜制备高质量、结构和晶向可控的柔性薄膜,有望用于未来制备堆垛异质结构等工材料,开发新型功能器件.
3.2.2 牺牲层法制备柔性氧化物
氧化物中存在部分可溶于酸碱溶剂或者水的材料,如MgO,La0.67Sr0.33MnO3,Sr3Al2O6及其衍生物等[93].利用这类牺牲层材料,制备功能材料/牺牲层/刚性衬底的异质结构,然后溶解牺牲层,获得可转移至柔性衬底上的高质量氧化物薄膜,同时开发出新奇的力、电、磁等性质[66,80,83,94].由于牺牲层与功能材料具有良好的晶格匹配性,这种方法能够制备不同晶向和结构体系的柔性氧化物薄膜,如不同晶向的La0.67Sr0.33MnO3(图12)[81,95]和Sr RuO3薄膜,Ruddlesden-Popper 结构的Sr2IrO4[96],尖晶石结构的超弹性Fe3O4[97],超导薄膜YBa2Cu3O7–x,钙钛矿结构的超拉伸性La0.7Ca0.3MnO3薄膜[83],表现出了良好的通用性.
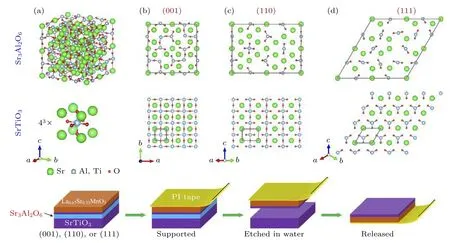
图12 基于水溶性Sr3Al2O6 牺牲层法的柔性La0.67Sr0.33MnO3 薄膜制备[95] (a) Sr3Al2O6 和SrTiO3 的晶体结构示意图;(b)不同晶向Sr3Al2O6 与典型钙钛矿氧化物SrTiO3 的晶格匹配关系;(c)不同晶向柔性La0.67Sr0.33MnO3 薄膜的制备Fig.12.Fabrication of flexible La0.67Sr0.33MnO3 film based on Sr3Al2O6 sacrifice layer[95]:(a) Crystal structures of Sr3Al2O6 and Sr TiO3;(b) schematic diagram of the lattice match relationship between Sr3Al2O6 and SrTiO3 along different crystal orientation;(c) schematic diagram of the preparation of flexible La0.67Sr0.33MnO3 film with various crystal orientations.
Zhang 等[93]报道了基于MgO 牺牲层制备自支撑CoFe2O4单晶薄膜的方法,他们在STO 衬底上分别外延生长了MgO 牺牲层和CoFe2O4薄膜,然后通过浸泡在温度为80 ℃的 (NH4)2SO4溶液中将MgO 牺牲层刻蚀掉,最后通过水溶液剥离出可转移至其他衬底上的自支撑CoFe2O4单晶薄膜.2018 年,Lu 等[81]选用易水解的Sr3Al2O6作为牺牲层,制备了外延的SrTiO3和La0.7Sr0.3MnO3单晶薄膜.Lu 等[20]基于此方法制备了不同晶向外延单晶La0.7Sr0.3MnO3薄膜,并进一步制备了具有垂直磁各向异性的柔性SrRuO3薄膜,通过改变牺牲层控制其晶格结构和晶向,调控了其易磁轴取向(图13).该方法只需在去离子水中进行,具有成本低、对氧化物薄膜化学改性小等优点,更适合实际应用.
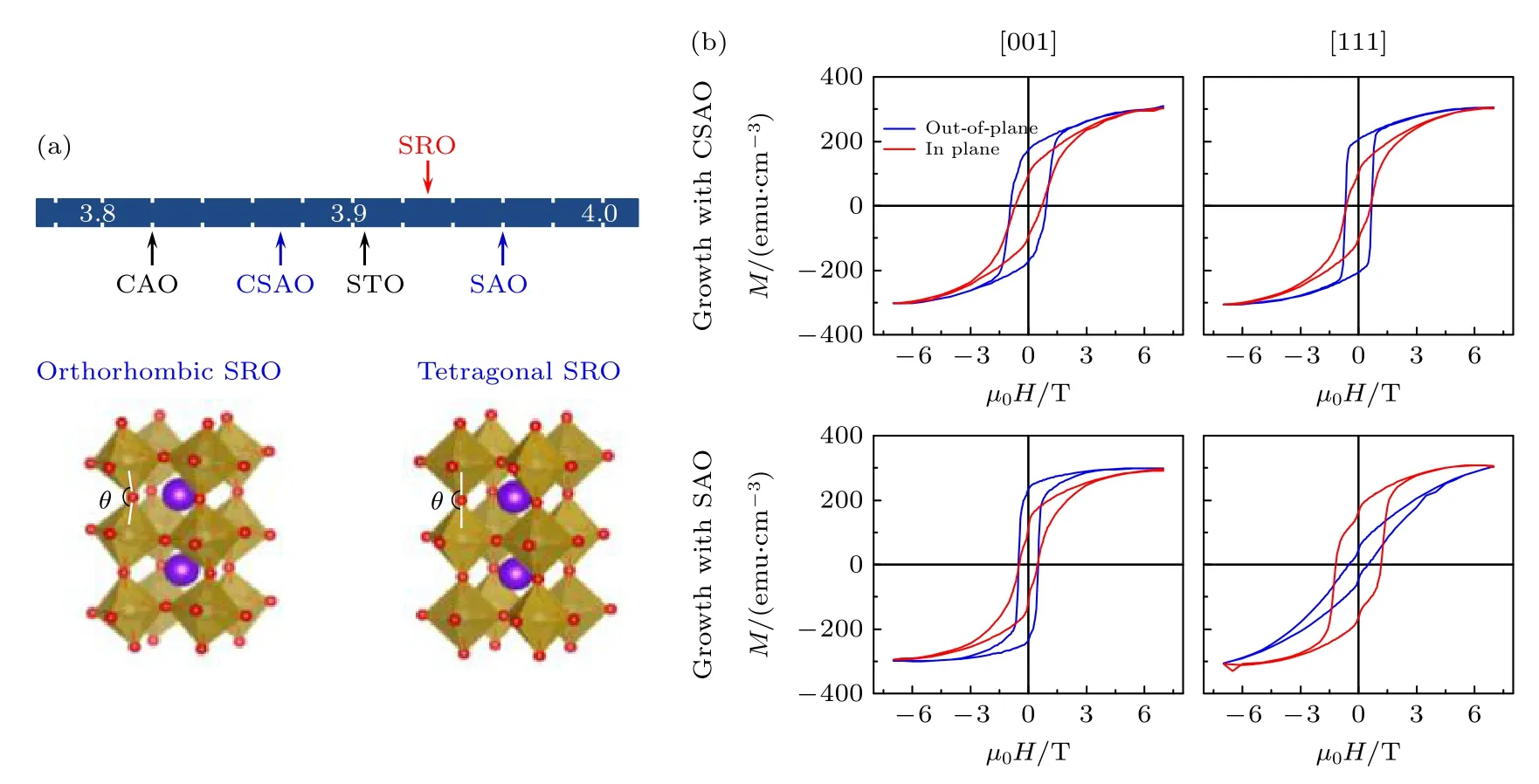
图13 基于水溶性Ca3–xSrxAl2O6 (0≤x≤3)(CSAO)牺牲层法的柔性SrRuO3 薄膜性能(1 emu/cm3=103 A/m) [20] (a) SrRu O3 与不同牺牲层Sr3Al2O6 (SAO)和CSAO 的匹配关系,CSAO 和SAO 作为牺牲层得到的SRO 分别为正交相和四方相;(b)两种牺牲层与晶向对SRO 薄膜磁各向异性的调制Fig.13.Magnetic properties of flexible SrRuO3 films fabricated by using water soluble Ca3–xSrxAl2O6 (0≤x≤3)(CSAO) as sacrifice layer[20]:(a) Comparison of lattice constants between SrRuO3 and different sacrifice layers of Sr3Al2O6 (SAO) and CSAO,the obtained SrRuO3 are of orthorhombic and tetragonal structure,respectively;(b) magnetic anisotropy of the obtained flexible SrRuO3 films.
4 柔性磁电子器件的制备和应用
磁性薄膜和器件的柔性化不仅使其应用场合从平整表面扩宽到复杂表面,而且还将带来更多的功能应用,这些应用包括:柔性磁传感器[98−101]、柔性应力传感[102,103]、柔性触觉传感器[24,25,104]、柔性能量收集器[105,106]、能量转换器[107]、柔性多铁异质结[108,109]等.这里主要介绍人们在柔性磁电子传感器方面的进展.
4.1 基于各向异性磁电阻效应的柔性磁传感器
Wang 等[110]通过将坡莫合金(Ni0.81Fe0.19)薄膜沉积到柔性的PET 衬底上,利用薄膜的各向异性磁电阻(AMR)效应制备了磁传感器件.首先,通过旋涂光刻胶缓冲层降低了薄膜粗糙度,提高了薄膜的AMR 数值;其次,将4 个磁阻薄膜构成惠斯通电桥,并设计结构使电流方向与薄膜初始磁矩方向呈45°夹角,以获得最佳的线性响应.所得的器件在3 Hz 时灵敏度达到150 nT,并且器件在10 mm 弯曲半径下仍可工作,有望应用于可穿戴电子器件中的导航器、医疗诊断、健康监测等方面.Bermúdez等[27]演示了柔性AMR 器件用于导航可行性,他们将坡莫合金沉积在超薄的聚酯薄膜上并构建了惠斯通电桥结构.器件的AMR 数值达到1.4%,探测极限为50 nT,可用做柔性指南针.当器件曲率半径达到1 mm 时,器件依然稳定工作;在超过2000 次弯曲循环后,器件的电阻变化小于0.2%,展示出良好的稳定性.进一步,Bermúdez等[27]将器件固定在食指上并基于对地磁场的探测成功地区分了北方(N)、西方(W)和南方(S).还展示了其在VR 系统人机交互接口上的应用:通过手指方向的改变可以控制游戏程序中物体的移动方向.
4.2 柔性巨磁电阻器件
1992 年,Parkin 等[111]在柔性聚酰亚胺薄膜上制备了Co/Cu 多层膜结构的GMR 器件,发现其GMR 数值与在刚性硅片上制备的刚性器件相当,这一特性为柔性GMR 器件的研究应用提供了基础.2008 年,Chen 等[112]通过旋涂光刻胶方法有效降低塑料衬底的粗糙度,提高了Co/Cu 多层膜界面的平整度,在(Co/Cu)10结构中获得了高达20%的磁电阻数值,优于在热氧化硅片上得到的磁电阻数值(~13%).虽然应力会对该器件的磁电阻数值带来影响,但是在弯曲1000 次的情况下,器件性能没有出现退化.Melzer 等[71]将Co/Cu 多层膜沉积在弹性PDMS 衬底上,获得了具有不规则褶皱结构的GMR 器件,该褶皱结构在拉伸时可以释放一定的应变,使得器件在拉伸4.5%时电阻和磁电阻数值基本保持不变.为了进一步提高其拉伸能力,Melzer 等[72]在超薄的PET 薄膜上制备了GMR 器件,通过将制备好的自旋阀传感器转移到预拉伸600%的弹性体(VHB 4905 F,3M 公司)上形成褶皱结构(图14),使得器件在270%拉伸应变下的磁电阻和磁灵敏度能够基本稳定不变,展示出良好的应用潜力.
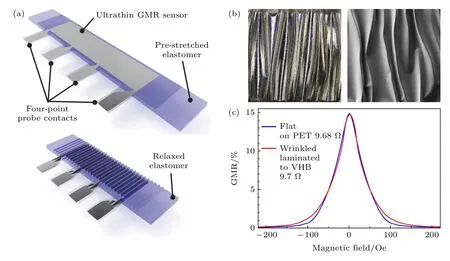
图14 柔性巨磁电阻器件和性能[72] (a)褶皱结构的GMR 器件;(b)光学形貌和扫描电镜下的表面形貌,标尺分别为200 µm和100 µm;(c)器件的GMR 曲线Fig.14.Flexible giant magnetoresistance device and its property[72]:(a) GMR device with wrinkled structure;(b) surface morphology under optical and SEM,the scale bars are 200 µm and 100 µm,respectively;(c) GMR curves of the wrinkled and flat device.
自旋阀器件相比GMR 具有更优的磁灵敏度,其应用更加广泛.Melzer 等[71]在预拉伸的PDMS上沉积Ta 缓冲层,释放应变后获得了PDMS/Ta褶皱结构,同时Ta 薄膜上形成裂纹,然后在Ta 薄膜上生长自旋阀结构,通过该“人工褶皱-裂纹结构”释放应变,使得柔性自旋阀的变形能力达到约30%,并且其磁电阻数值基本维持在7%左右.但是该柔性自旋阀只能在单一方向拉伸,而且灵敏度随应变的增加而显著降低(从初始状态的0.8%/Oe下降到拉伸状态下的0.2%/Oe).Li 等[21]通过在预拉伸的PDMS 衬底上直接沉积条带宽度为100 µm以下的双自旋阀结构(图15(a)),沉积结束后通过释放预应力形成周期性条带褶皱结构(图15(b)和图15(c)).在拉伸状态下,由于应变主要通过PDMS释放,因而避免了裂纹的出现,进而实现在30%的单轴拉伸范围内器件的电阻、磁电阻(9.9%)和灵敏度(0.69%/Oe)等均基本保持不变(图15(d)).
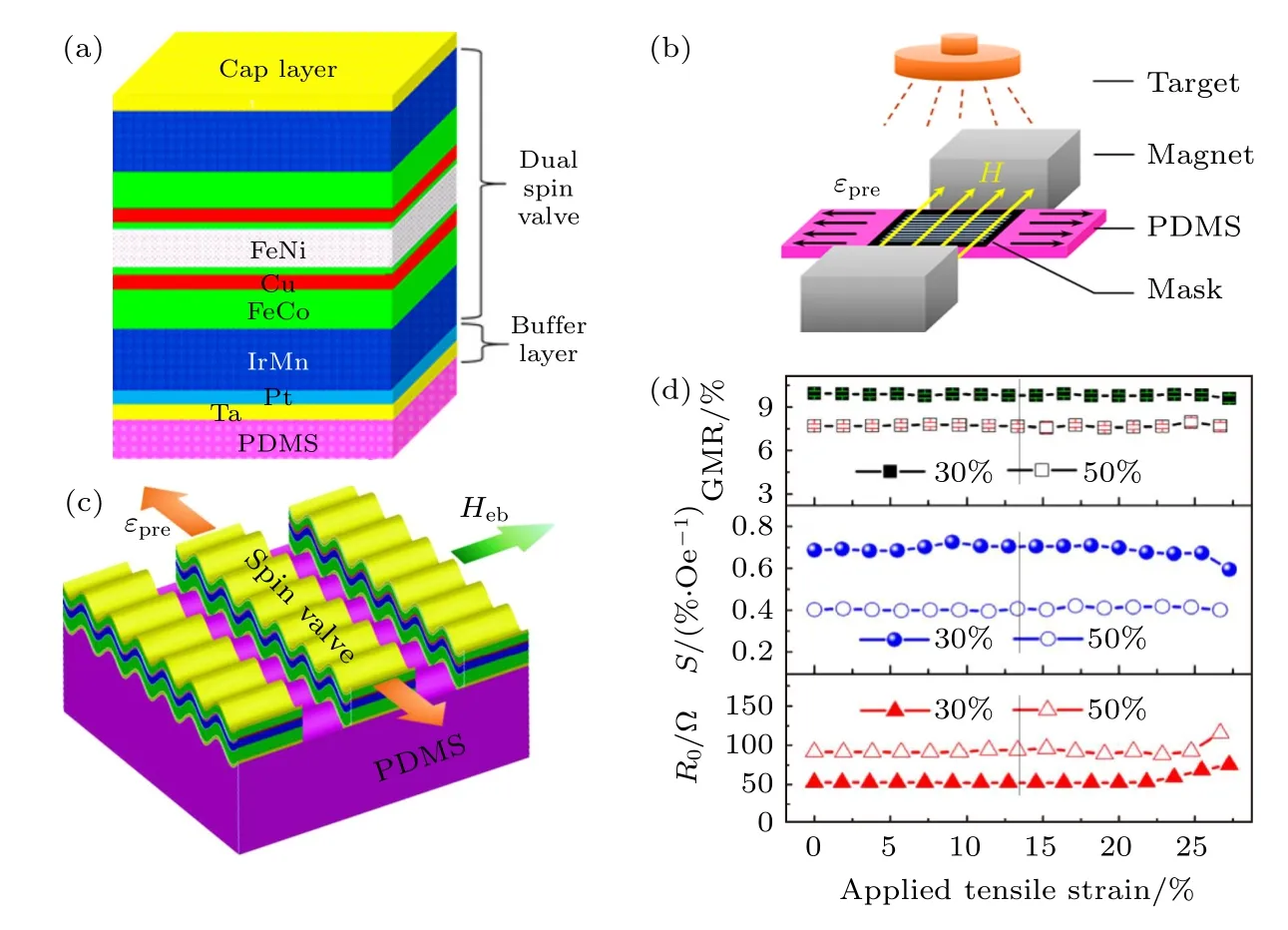
图15 可拉伸自旋阀器件和性能[21] (a)器件结构示意图;(b)生长示意图;(c)可拉伸褶皱结构示意图;(d)拉伸状态下的GMR数值、磁灵敏度和电阻变化Fig.15.Stretchable spin-valve device and its property[21]:(a) Schematic diagram of the device;(b) the device fabrication setups;(c) schematic show of the periodic wrinkled device;(d) variation of the GMR ration,magnetic sensitivity,and resistance at different tensile strain.
4.3 基于磁传感原理的柔性应力传感器
易于形变是柔性电子器件的重要特点,对于磁弹耦合效应强的磁性薄膜,其磁各向异性极易被外加应力调控,从而改变磁电子器件的输出信号.反过来,利用器件对应力敏感的特性,也为应力的测量提供了新的方案[113,114].
4.3.1 柔性应力传感器
Liu 等[115]将具有强磁致伸缩性能的FeGa 与具有显著磁电阻效应的FeCo 薄膜复合构成自由层,在PET 衬底上制备了柔性的自旋阀器件并获得了5.9%的磁电阻数值.在应力作用下,由于FeGa的逆磁致伸缩效应,自旋阀的自由层磁矩发生偏转,导致器件电阻的变化.在30 Oe 磁场偏置下,该自旋阀器件的等效压阻系数达7.2,高于一般金属应变计中的数值.Fuji 等[116,117]通过测量基于MgO 的MTJ 器件在应力下的磁电输运响应,发现在合适的外场条件下,器件的压阻系数可以高达5000 以上.Ota 等[23]发现利用GMR 器件不仅能测定应力的大小,还能获得应力的方向.他们在弹性的PEN 衬底上制备了多种材料类型的GMR 器件,通过材料设计使得钉扎层具有应力不敏感特性而自由层对应力敏感.以Co/Cu/NiFe GMR 器件为例(图16(a)),当没有应力施加时,器件的巨磁电阻效应并不明显,这被归因于自由层和钉扎层的磁矩随外磁场同步翻转,以至难以获得磁矩反平行的高电阻状态;当应力沿着x轴方向施加时,沿x方向测量时,Co 的矫顽场逐渐增大,而NiFe 的矫顽场基本保持不变,此时器件呈现出典型的GMR 曲线特征(图16(b));当磁场沿着y轴方向施加时,Co 和NiFe 的磁矩转动不一致,使得其磁阻先增大后减小(图16(c)).特别是当应力沿着不同方向施加时,在沿着y方向的外磁场辅助下,器件的磁阻行为存在着显著的不同(图16(d)),使得利用该器件探测应力施加的方向成为可能.基于这种特性构建的阵列式GMR 探测器为探测局域应力分布提供了一种解决方案,然而辅助磁场的施加使得其应用受到限制,Matsumoto 等[118]将交换偏置效应引入该器件,实现了无外磁场辅助的应力大小和方向探测,同时还提高了器件对小应变的分辨能力.他们将器件贴附在手背上,并且利用该器件实现了对不同手指运动的探测.
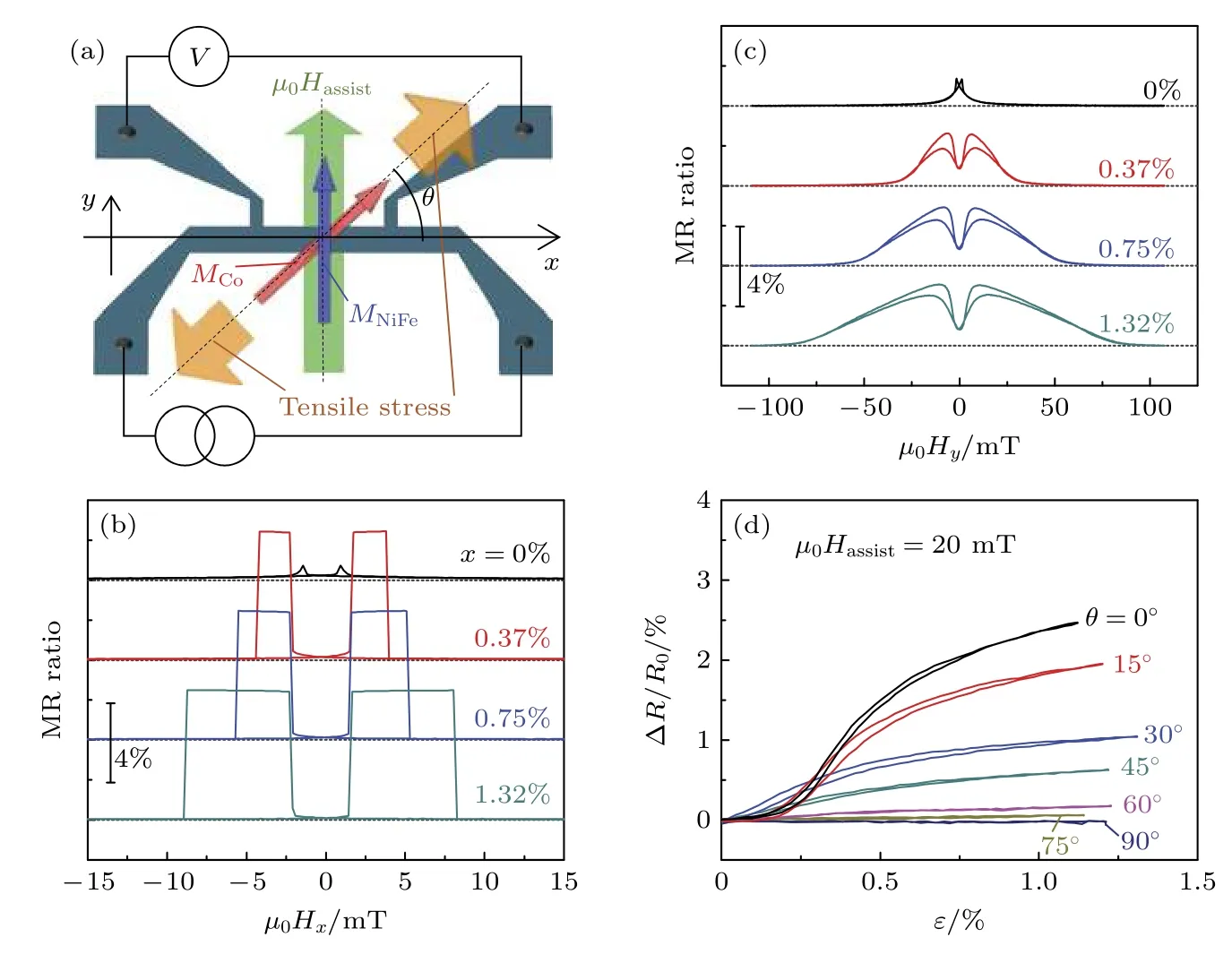
图16 可感受应力方向的GMR 传感器[23] (a)器件结构示意图;(b)不同应变下,器件磁电阻随着x 方向磁场的变化;(c)不同应变下,器件磁电阻随着y 方向磁场的变化;(d)不同方向施加应变时,电阻变化率随应变大小的变化规律Fig.16.GMR sensor that can detect the stress direction[23]:(a) Device structure;magnetoresistance at various stress with field along x (b) and y (c) direction;(d) resistivity change ratio as a function of strain at various strain directions.
4.3.2 柔性触觉传感器
触觉传感器可赋予机器人通过接触来感知外部环境并与之交互的能力,在机器人灵巧操作、人机共融、模式识别等领域有着重要的应用[24,119−121],Yan 等[104]设计了一种厚度约为0.5 mm 且被正弦磁化的柔性薄膜,并将其与霍尔传感器阵列复合,可以通过磁场密度在外力作用下的变化来检测柔性薄膜的变形,实现触觉传感.柔性磁性薄膜和霍尔传感器之间可以填充不同厚度和弹性的硅胶,用来调节传感器的灵敏度和量程.当有外力施加于磁膜上时,霍尔传感器将测量到由磁膜变形所引起的磁场变化,进而可以测量出所施加外力的大小和方向.他们发现把磁膜按正弦磁化后,其磁感应强度B和磁场方向RB在是x-z平面内是天然解耦的,即磁感应强度B只和z方向有关,磁场方向RB只和x方向有关.解耦后的磁性皮肤可以提供独立的正压力和切向力的测量,给机器人提供了更精确的力反馈.他们采用深度学习方法,将接触位置的定位精度提高了60 倍,达到了与人类皮肤超分辨率(约40 倍)可比的程度.具有超分辨触觉感知在机器人领域有很大的应用潜力,可以赋予机器人灵巧操作日常物品的能力(例如基于自适应的物体夹持),提高人机交互的安全性.Ge 等[24]基于GMR效应获得了一种具有双模式传感(接近传感和接触传感)功能的柔性电子皮肤(图17).他们使柔性GMR 薄膜与金字塔状的磁性阵列薄膜之间形成空气间隙结构(图17(a)),当被测物具有磁性时,可以通过GMR 器件的传感实现远程探测;当被测物接触器件时,由于磁性薄膜与GMR 的距离发生改变,使得GMR 器件的电阻发生变化并实现触觉探测(图17(b)).通过优化远程磁场与磁性薄膜的磁化方向,该磁性微机电系统可以实时区分非接触传感和触觉传感带来的电学响应(图17(c)—(e)),有望在增强现实、机器人和医疗等领域实现应用.
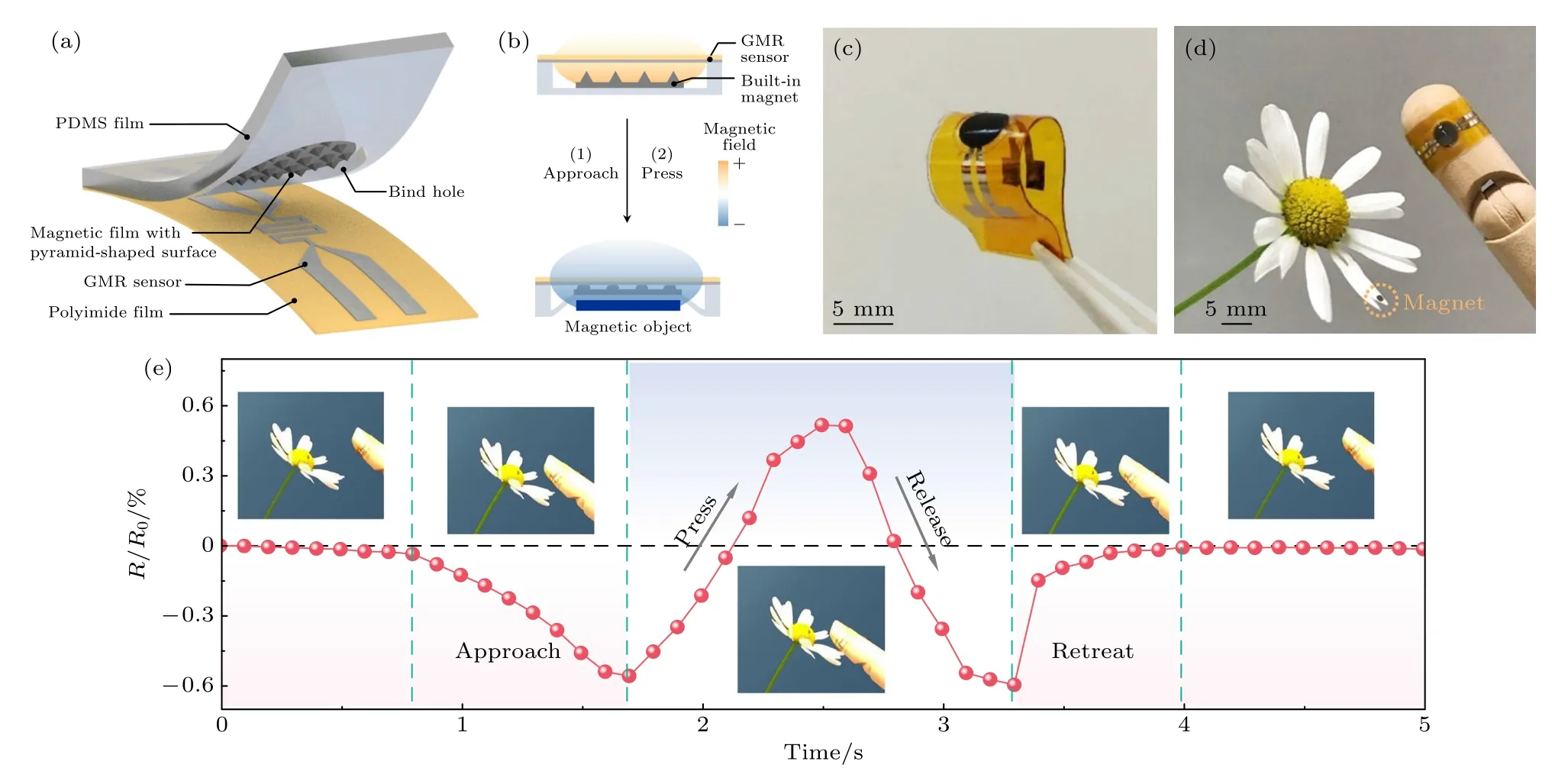
图17 基于GMR 效应的双模式柔性传感器[24] (a)器件结构示意图;(b)器件的靠近-接触双模式传感原理;(c)器件在弯曲状态下的光学照片;(d)将传感器固定在木手指上用于传感;(e)当固定有传感器的木手指靠近、接触、远离贴附有磁体的花瓣时器件的电阻变化Fig.17.GMR-based bimodal flexible sensor[24]:(a) Schematic structure of the GMR-based bimodal flexible sensor;(b) mechanisms of the touchless (proximity) and tactile (pressure) sensing modes;(c) photograph of the sensor in bent state.(d) a photograph of the sensor wrapped around a wooden model finger;(e) change of the electrical resistance upon an interaction event where the finger bearing the sensor approaches,touches and retreats from the magnet-decorated flower petal.
目前,大多数电子皮肤只能将外力刺激转换成模拟信号,无法像人体皮肤一样将外力刺激转换成生理脉冲,并精确地传送给神经系统直至大脑.Wu 等[25]利用高灵敏的巨磁阻抗效应,设计了“Air gap”结构(图18(a)),采用非晶丝作为磁芯提高其性能,获得了灵敏度为4.4 kPa–1、探测极限为10 µN (相当于0.3 Pa)的数字化柔性触觉传感器件(图18(b)).他们进一步通过优化传感器的模量和结构,获得了宽的探测范围,既可感知微弱的蚊虫和脉搏,亦可以感知搬举重物时的压力.采用电感-电容(LC)振荡机理设计电路(图18(c)),当外界应力引起电感值发生变化时,LC 电路的频率就会发生变化,从而获得外加应力与频率的对应关系,进一步通过优化LC 共振电路,使其工作在人体的生理脉冲频率范围内(图18(d)).该工作为发展数字化仿生电子皮肤提供了一种新的方法,该传感器赋予电子皮肤类人的感知,有望应用在假肢和机器人等产品上.
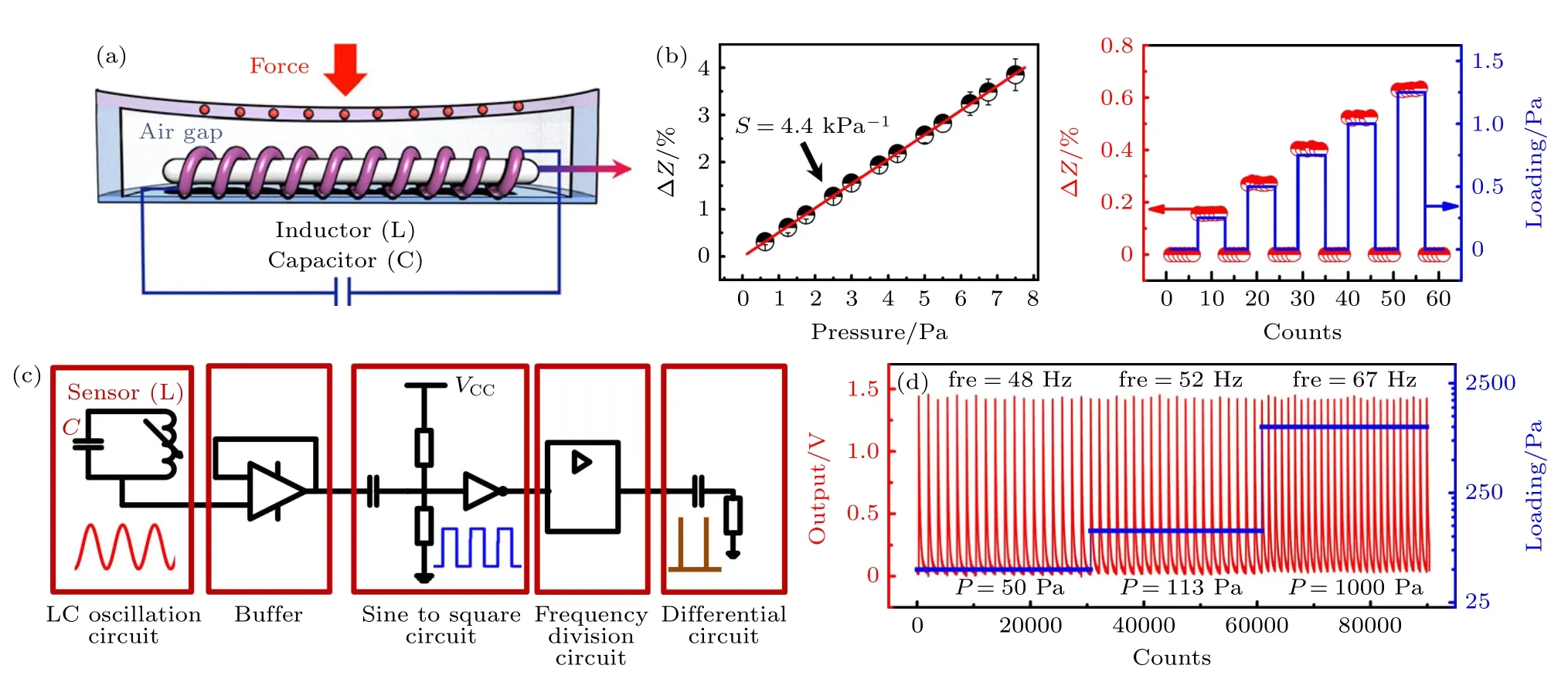
图18 基于巨磁阻抗效应的触觉传感器[25] (a)器件结构示意图;(b)器件的力敏特性;(c)将传感器的模拟信号转换成数字-频率信号的电路示意图;(d)外加压力作用下器件的数字-频率响应Fig.18.Flexible tactile sensor based on the GMI effect[25]:(a) Schematic illustration of the device structure;(b) relation between changes in impedance and applied pressures shows the sensitivity of the tactile sensor in the ultralow pressure range;(c) schematic diagram showing the circuit that converts analog signals recorded from the sensor into digital-frequency signals;(d) the digital-frequency response of the device changed with applied pressure.
5 展望
当前,人们在柔性磁性薄膜制备、性能调控、器件设计和应用等方面取得了一些进展,使得柔性磁电子器件在人机交互、非接触探测、电子皮肤等领域展现出独特的吸引力.事实上,随着柔性薄膜制备技术的提升,柔性磁性薄膜和器件中的力-磁耦合效应将会被进一步深入研究,并有望带来新的应用.例如,应力敏感的磁性薄膜为构建新型力敏器件提供了基础,而应力不敏感的磁性薄膜则是构建柔性磁传感器的优选材料.当前研究表明,对磁性薄膜进行结构设计是调控其应力敏感特性的有效方法.然而,这些方法难以与器件的微加工工艺兼容,为器件的微型化和阵列化带来挑战.另一方面,柔性化的将薄膜从平面结构带到曲面结构,这种演化将在磁性体系中引申出有趣的几何效应.比如,平面内共线的铁磁结构和各向异性在曲面状态下将如何演化?演化过程由哪些因素决定?更进一步,这种几何效应在反铁磁乃至具有非线性磁结构的体系中又将呈现哪些规律和特点,对电输运的影响规律如何?此外,随着薄膜制备手段的提高,一些薄膜的应变极限已经远远突破了其块体应变极限,这为研究磁性薄膜在大应变下的物性演化提供了可能.例如,Hong 等[66]制备出可承受高达8%应变的La0.7Ca0.3MnO3单晶薄膜,远远超出其块体的极限应变.如果能够在其他材料(如Fe,Co,Ni,Mn,Pt 等)获得超大的应变极限,将为深入认识磁性的基本演化规律提供新的实验基础.
在器件制备和应用方面,为了适应可穿戴领域的应用需求,需要获得具有大形变能力的柔性磁电子器件.当前,制备的柔性磁性薄膜在单方向的拉伸量已经超过200%,但是这些薄膜基本不具备好的多向拉伸能力,这为实际应用带来了不便.因此,如何获得具有多向拉伸能力的柔性磁性薄膜是值得探索的重要内容.另一方面,在柔性电子器件中,电路电阻在应变作用下容易发生变化(大部分金属电路的应变灵敏因子约为2),而自旋阀等磁电子器件作为电阻型器件,其灵敏度必然受到电路电阻变化的影响.因此,构建应变下电阻稳定的电路,将为开发高性能的柔性磁电子器件提供重要基础.最后,随着机器学习和人工智能的快速发展,我们相信,基于柔性磁电子器件构建人工智能网络将是柔性磁电子器件未来的重要发展方向,这一发展趋势必将为人类生活带来巨大的便利.
猜你喜欢
智能计算机与应用(2022年9期)2022-09-28
汽车实用技术(2022年15期)2022-08-19
物理学报(2022年15期)2022-08-12
天津大学学报(自然科学与工程技术版)(2022年10期)2022-07-04
中国信息化(2022年5期)2022-06-13
海峡科技与产业(2021年6期)2021-12-21
北京汽车(2021年1期)2021-03-04
河南科技(2020年6期)2020-10-21
发明与创新·小学生(2019年11期)2019-08-11
军事文摘·科学少年(2017年4期)2017-06-20