俯仰轴轴线位置的视觉标定方法研究
2022-05-26 02:29房建国
计量学报 2022年4期
毕 超, 赵 源, 郝 雪, 房建国
(北京航空精密机械研究所 精密制造技术航空科技重点实验室,北京 100076)
1 引 言
未来先进涡轮风扇发动机的涡轮入口燃气温度会达到2 000~2 300 K[1,2],这将导致涡轮叶片等热端零部件无法正常、稳定及长寿命地工作,因而必须采取“外部气膜冷却技术”来提高其承温能力[3],即在涡轮叶片的叶身等部位上设置一系列孔径小、数量多、分布密集且轴线角度复杂的气膜孔。研究表明,气膜冷却效果会受到气膜孔的几何结构与形位精度等因素的影响[4],因而要最大限度地发挥出外部气膜冷却技术的降温与防护效果,就需要实现对气膜孔的几何结构及形位参数的高精高效检测。
根据气膜孔的形态特征与测量要求,本文将工业级摄像机与多轴运动机构相集成,研制出了一套应用于气膜孔形位参数检测的新型五轴视觉测量系统。在该系统中,以摄像机作为前端传感器,并通过俯仰轴与方位轴的配合来改变被测涡轮叶片的空间姿态,从而使摄像机能够对准并采集到具有不同轴线角度的气膜孔图像数据。在开始测量前,必须采取一定的技术途径和手段标定出俯仰轴与方位轴的轴线在测量空间中的方位,这样才能够使在各个转角位置处获取的图像数据均具有相同且统一的基准,从而进行后续的数据拼接与整合[5]。在前期工作的基础上,重点针对系统中的俯仰轴轴线的方位标定进行了研究与探讨。
由于系统中俯仰轴的转角范围为-90°~+90°,无法实现整周回转,而且摄像机采集和输出的数据类型为目标物体的二维图像,这就给本文所面对的俯仰轴轴线标定问题带来了很大难度,主要包括标定方案的制定与标定靶标的选取。当前,在复杂工业零部件的三维测量和逆向工程领域中,相关科研人员对于不同类型的多轴测量系统,提出了一些旋转轴线标定与数据拼接的方法。Park S Y和Dai M L等[6,7]将棋盘格靶标固定在旋转台上,应用立体视觉系统拍摄不同转角位置处的靶标图像,通过共轭点匹配建立旋转轴的直线方程,从而完成了旋转轴的方位标定;李鹏飞等[8]针对所搭建的结构光三维测量系统,提出了一种应用圆锥靶标来标定旋转轴轴线的方法,通过对多个转角位置处的圆锥顶点进行拟合而建立起旋转轴的直线方程,使点云拼接精度达到了0.054 mm;胡民政等[9,10]应用结构光传感器采集两个标定球在不同视角下的测量数据,而后通过拟合两个球心轨迹的圆心解算出了摆动轴与转动轴的轴线,使系统的测量精度达到了0.04 mm;何万涛等[11]针对搭载锥光偏振全息激光测头的四轴叶片检测系统,提出了一种带半径约束的球心拟合方法,通过8个方位的球心三维坐标计算出了转台轴线的中心点和方向,实现了转轴方位的精确标定,标定精度达到了±0.01 mm。虽然这些方法解决了某些特定系统中的旋转轴线标定问题,但是在设备形式和传感器类型等方面具有很大的局限性,均不适用于本文中采用摄像机作为前端传感器的测量系统。
为了使所研制的气膜孔五轴视觉测量系统具备多轴测量功能,本文提出了一种应用工业级摄像机和定制的长方体标定靶标来确定俯仰轴轴线的空间位置的方法。通过双轴位置转台的俯仰轴使标定靶标处于不同位姿,并由三维运动平台带动摄像机运动而采集到靶标的前表面与上表面的正焦图像;然后,提取出图像中的目标棱边,并利用目标棱边的唯一性建立约束条件而进行联立求解,最终解算出俯仰轴轴线的原点坐标,使系统实现了多轴测量功能。
2 气膜孔五轴测量系统
图1为所研制的气膜孔五轴视觉测量系统。该系统采用“X、Y、Z3个移动轴和B、C2个旋转轴”的总体结构形式,由三维运动平台、工业级摄像机、双轴位置转台和叶片定位工装等构成。其中,三维运动平台和双轴位置转台构成该系统的硬件基础,而摄像机是该系统的前端传感器[12],搭载于三维运动平台的Z轴末端并且空间方位固定,从而通过X、Y和Z轴的运动来实现摄像机在测量空间中的移动轨迹和准确定位。同时,为了能够采集到涡轮叶片上具有不同轴线角度的全部气膜孔的实测数据,在系统中进一步增加了具有俯仰轴和方位轴的双轴位置转台,以用于改变被测涡轮叶片的空间方位,其中,B轴为俯仰轴,C轴为方位轴。
三维运动平台为移动桥式结构,其中X、Y和Z轴方向的光栅尺分辨力均为0.5 μm,各轴运动范围均为500 mm,示值误差为(2.5+3×L/1000)μm,其中L表示被测长度[13]。双轴位置转台采用U-T型结构形式,B轴与C轴之间的垂直度≤5″,B轴的角位置工作范围为-90°~+90°,C轴的角位置工作范围为0°~360°,并且各轴的回转误差均≤±2″。
在将双轴位置转台安装于三维运动平台上后,还需要对其姿态进行机械找正与精密调整,使得B轴与C轴均处于零位时,B轴轴线与三维运动平台的Y轴平行,同时C轴轴线与Z轴平行。此时,B轴和C轴的轴线方向矢量分别被确定为(0,1,0)和(0,0,1),这样就能够将传统的轴线标定参数由6个减少到了3个,从而显著降低了气膜孔五轴视觉测量系统中的轴线标定难度。在应用过程中,当B轴与C轴处于不同的转角位置时,由摄像机采集到的此状态下的测量数据就可以通过简单的旋转、平移等坐标变换而获得统一的基准,从而使系统实现多轴测量功能[14]。因此,需要采取一定的技术手段在“五轴+视觉”的系统条件下分别确定出B轴和C轴的轴线位置,而本文重点研究B轴轴线的位置标定问题,即确定出B轴轴线的原点OB在O-XYZ中的空间坐标(X0,Y0,Z0)。
系统前端摄像机由CCD和镜头等组成。其中,CCD选用Grasshopper3系列工业相机,该型相机采用Sony ICX674 CCD传感器,其像面尺寸为8.8 mm×6.6 mm,像素数目为1 920×1 440,单个像元的大小为4.54 μm×4.54 μm;镜头选用MML-HR系列远心镜头,其放大倍数为4,分辨力为3 μm,工作距离为65 mm。
3 标定原理与算法
工业级摄像机属于光电传感器,其采集和输出的数据类型为被测物体的二维图像,并且景深范围有限,因而非常适合于对平面物体进行成像,并且对于物体的边、角、棱等剧烈变化部位的结构特征较为敏感[15,16]。因此,本文提出了一种应用具有平面和锋利棱边特征的定制靶标来标定出B轴原点OB的空间坐标(X0,Y0,Z0)的方法,具有易于实现且适用性强的特点。定制的长方体靶标如图2所示,该标定靶标由工具钢或合金钢制成,形状精度良好,各个表面均为平整的亚光表面且纹理特征、表面粗糙度相近,而且其各条棱边均为锋利、完整的直边。具体说来,该靶标的三维尺寸为80 mm×40 mm×10 mm,各个表面的平面度≤2 μm、表面粗糙度Ra优于 0.08,并且相对表面之间的平行度≤2 μm。相比于常规的球形标定靶标,该靶标一方面易于制作且易于达到较高的形位精度;另一方面结构特征与摄像机的成像特点相契合,适用于解决视觉测量系统的标定问题。
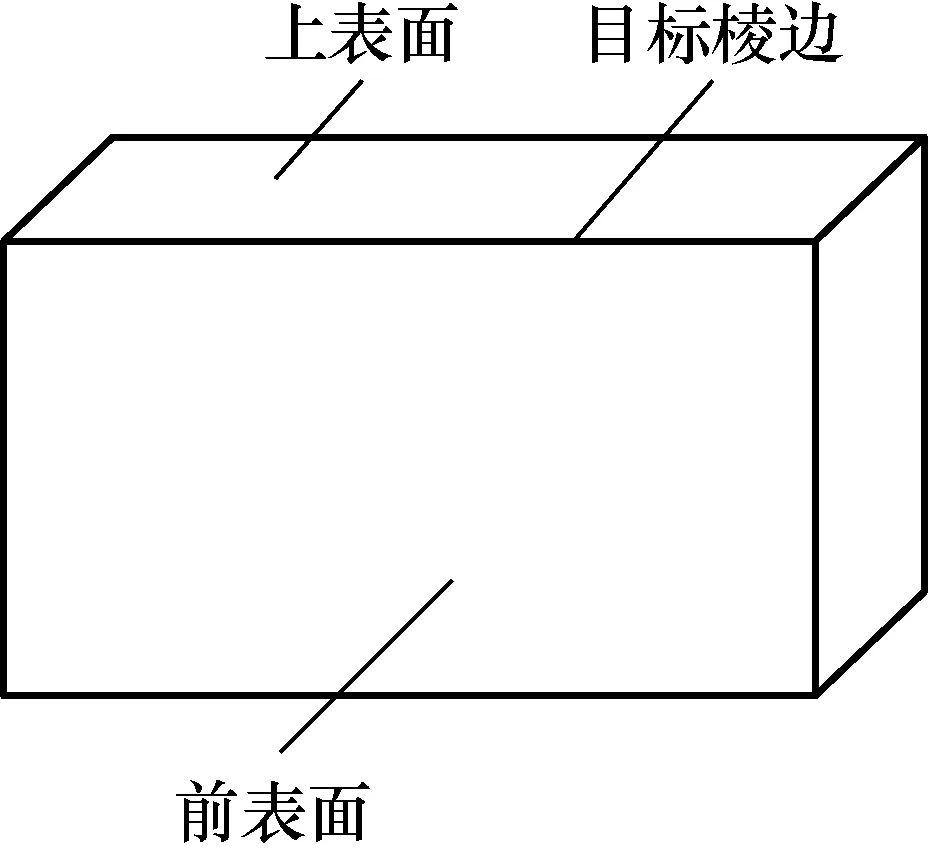
图2 定制的长方体靶标
应用此标定靶标来标定俯仰轴(B轴)轴线位置的步骤如下:
(1)控制B轴和C轴均旋转到各自的零位,将标定靶标放置于双轴位置转台上,而后对靶标的方向和姿态进行机械找正与精密调整,使靶标的前表面朝向摄像机且与测量系统的YOZ平面平行,如图3所示。由于靶标的上表面与其前表面垂直,则此时靶标的上表面与XOY平面平行,调整好靶标的方位后将其固定。将处于此状态下的由标定靶标的前表面与上表面相交而成的棱边定义为目标棱边,以用于后续的轴线标定。
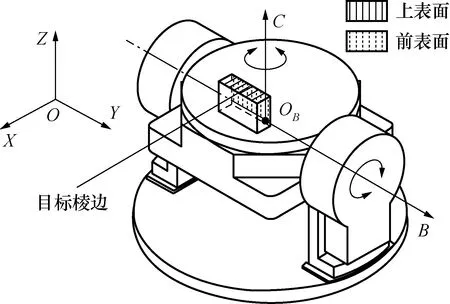
图3 调整好方位后的标定靶标
(2)控制三维运动平台带动摄像机运动,使靶标的前表面完全进入到摄像机的视野中,而后通过自动对焦评价函数使摄像机在X轴方向上对焦于靶标的前表面,则此时能够观察到最清晰的靶标前表面图像;然后,单独控制Z轴使摄像机向上运动,直到目标棱边出现在摄像机的视野中,采集此状态下的目标棱边图像,并读取此时X、Z轴的坐标示值为X1和Z1,如图4所示;接下来,在所采集到的图像中通过阈值分割、边缘检测等步骤提取出与目标棱边对应的边缘特征,并计算该边缘特征与图像中心在图像高度方向上的像素数目,将其记为像素距离la(单位:pixel),再乘以每个像素所代表的物理尺寸k(单位:mm/pixel),就可以得到与la相对应的实际距离a(单位:mm),即
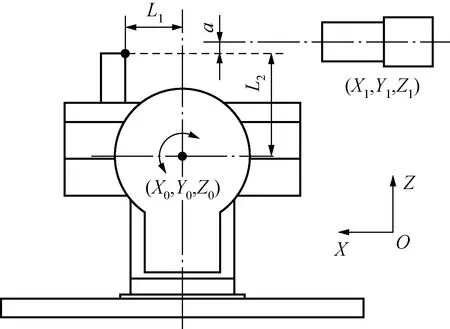
图4 B轴处于0°时采集目标棱边图像
a=k·la
(1)
(3)控制B轴旋转到90°位置,则此时靶标的上表面朝向摄像机,控制三维运动平台带动摄像机运动,使靶标的上表面完全进入到摄像机的视野中,然后通过自动对焦评价函数使摄像机在X轴方向上对焦于靶标的上表面,则此时能够观察到最清晰的靶标上表面图像;然后单独控制Z轴使摄像机向下运动,直到目标棱边出现在摄像机的视野中,采集此状态下的目标棱边图像,并读取此时X、Z轴的坐标示值为X2和Z2,B轴处于90°时采集目标棱边图像如图5所示;接下来,在图像中提取出与目标棱边对应的边缘特征,并计算该边缘特征与图像中心在图像高度方向上的像素数目,将其记为像素距离lb,再乘以每个像素所代表的物理尺寸k,从而得到与lb相对应的实际距离b,即
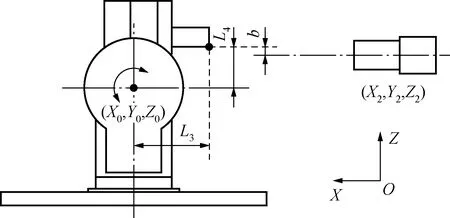
图5 B轴处于90°时采集目标棱边图像
b=k·lb
(2)
(4)对X1、Z1、X2、Z2、a和b进行代数运算,分别得到图4和图5中的物理距离L1、L2、L3和L4的表达式:
(3)
式中:X0和Z0分别为B轴原点OB的X轴坐标分量和Z轴坐标分量,mm;L1和L2分别表示B轴处于0°时的目标棱边与OB在X轴方向和Z轴方向上的物理距离,mm;L3和L4分别表示B轴处于90°时的目标棱边与OB在X轴方向和Z轴方向上的物理距离,mm;X1和Z1分别为摄像机采集前表面目标棱边图像时的X、Z轴的坐标示值,mm;X2和Z2分别为摄像机采集上表面目标棱边图像时的X、Z轴的坐标示值,mm;a和b分别为与像素距离la和lb相对应的实际距离,mm。
(5)根据双轴位置转台与标定靶标的结构特征以及相互位置关系,由于目标棱边的唯一性而存在着距离约束关系L1=L4且L2=L3,如图6所示,因而与式(3)联立为多元一次方程组而进行求解,即可得到B轴原点OB的X0坐标和Z0坐标的表达式,即
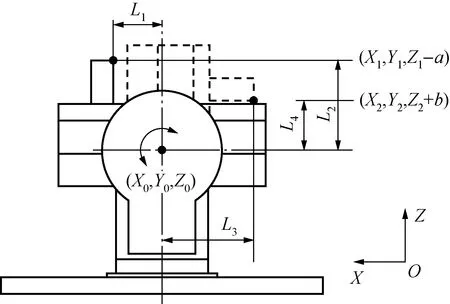
图6 X0和Z0的计算原理
(4)
(5)
(6)对于B轴原点OB的Y0坐标,可以根据C轴轴线的原点坐标来确定,在本文中,将已经标定出的C轴原点在Y轴方向上的坐标作为B轴原点OB的Y0坐标,这样就完成了俯仰轴轴线的原点坐标标定。
通过以上步骤,即可确定出B轴轴线的原点OB在系统测量空间中的三维坐标(X0,Y0,Z0),再结合上文通过调整与找正所确定的轴线方向矢量(0,1,0),从而确定了双轴位置转台的俯仰轴轴线的空间方位。
4 实验验证
俯仰轴轴线位置的标定是五轴视觉测量系统功能实现的关键环节,为了验证所提出的视觉标定方法的可行性及精度水平。在如图7所示的已有设备条件下,首先按照上文所述的标定靶标和标定步骤,对双轴位置转台的B轴在测量空间O-XYZ中的位置进行了标定。
在标定过程中,首先在B轴和C轴均回零的状态下,应用千分表等对标定靶标进行找正与调整,以使其处于正确的空间方位。然后,通过2个旋转轴与3个直线轴之间的运动配合,使摄像机对焦于靶标的前表面,并对采集到的前表面正焦图像进行边缘提取与像素距离la的计算,如图8所示;而后使摄像机对焦于靶标的上表面,并对采集到的上表面正焦图像进行边缘提取与像素距离lb的计算,如图9所示。
根据图8和图9中的边缘提取结果以及式(1)~式(5),即可解算出B轴原点坐标(X0,Y0,Z0)中的X0和Z0。而对于Y0,将其取为已经标定出的C轴原点在Y轴方向上的坐标值。为了提高位置标定精度,按照步骤(1)~(6)连续进行了多次标定实验,并将各次的标定结果取平均后作为最终的B轴原点坐标,即OB(206.933 5, 254.835 5, 157.055 7),单位:mm。
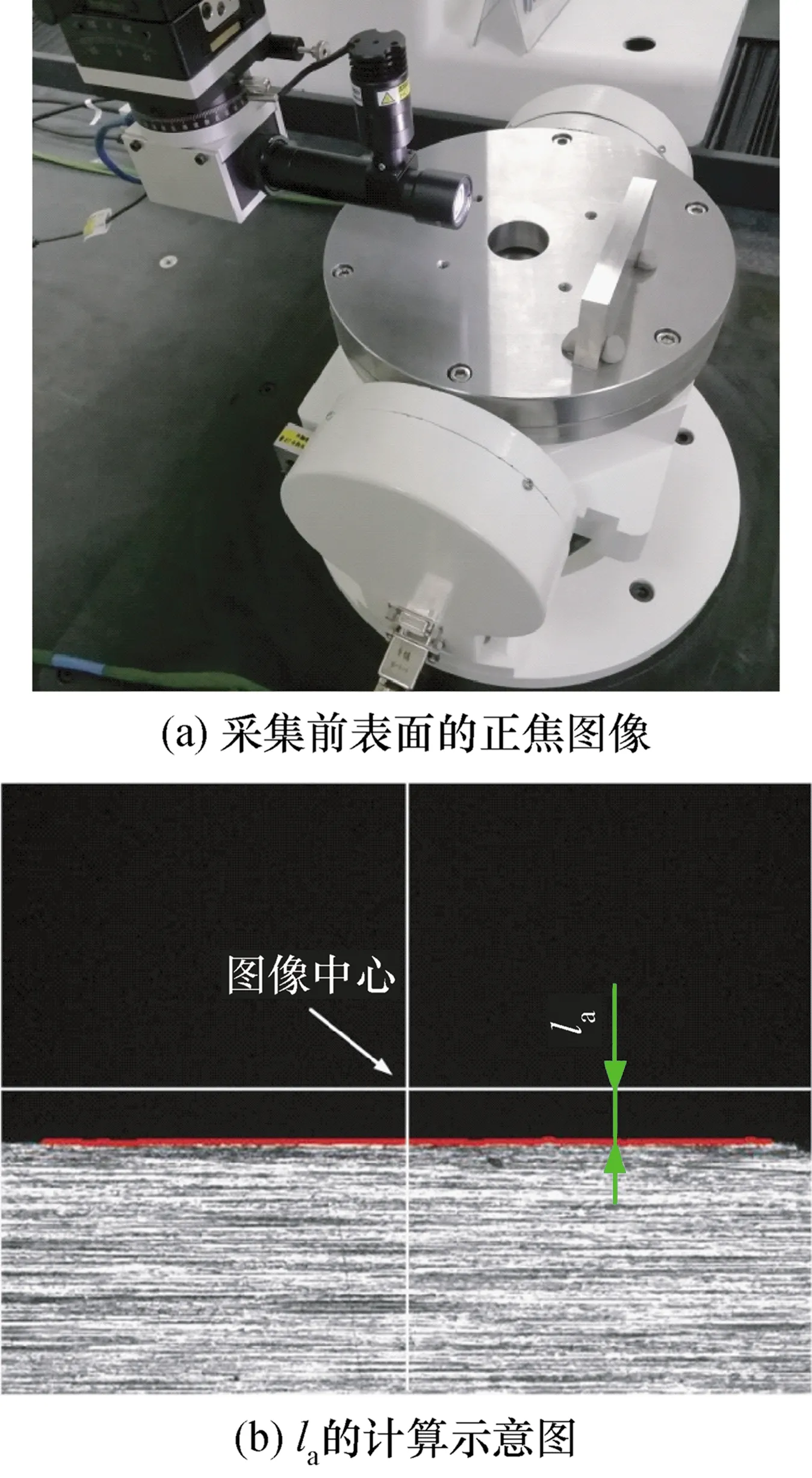
图8 采集靶标前表面的正焦图像并计算la
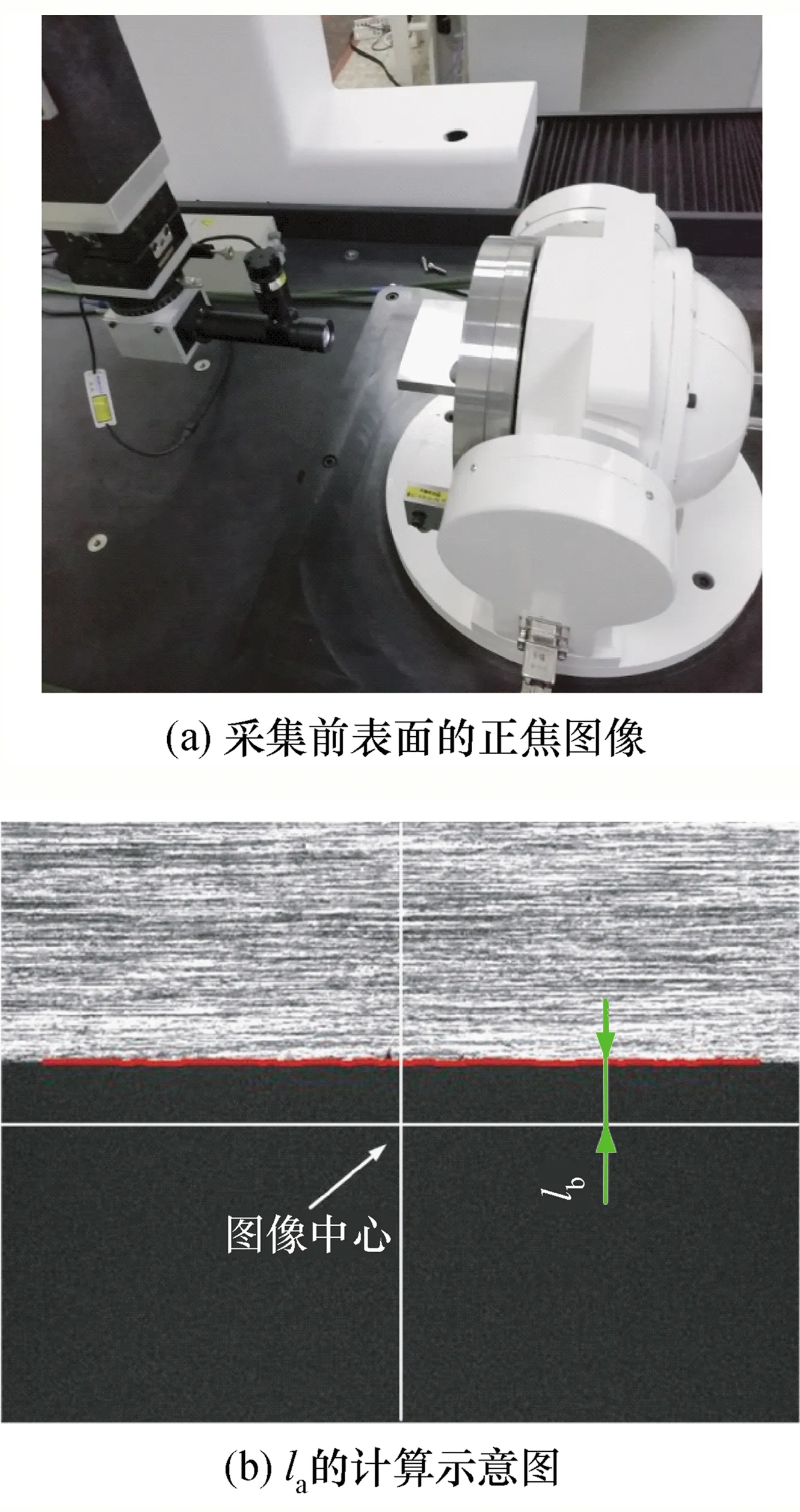
图9 采集靶标上表面的正焦图像并计算lb
对于系统中的双轴位置转台,其B轴和C轴的回转角度误差均≤±2″。
开始标定前,在B轴和C轴均回零的状态下对标定靶标进行找正与调整,以使其处于正确方位,而且在整个标定过程中C轴的转角位置并不发生变化,因而C轴的回转角度误差不会对标定结果产生影响。而B轴的回转角度误差会使标定靶标发生倾斜,但由于标定靶标的尺寸较小,由B轴回转角度误差所带来的前表面或上表面倾斜位移≤±5 μm,可以满足后续气膜孔位置度的检测精确要求。
在完成B轴原点位置的标定后,还需要通过进一步的测量实验对标定结果进行正确性与精度水平的验证。因此,本文选取了一个长方体试验件作为被测物,该试验件采用了与标定靶标相同的材料和制作工艺,其被测面1与被测面2之间的标称尺寸为60.003 mm。
在实验过程中,首先在B轴和C轴均回零的状态下,调整试验件的空间方位,使被测面1朝向摄像机并将其固定。应用该测量系统对焦于被测面1并获取此状态下的坐标示值。然后,控制B轴旋转到90°位置,应用该测量系统获取与被测面2相对应的棱边的坐标示值,而后利用B轴原点坐标的标定结果将该坐标示值转换为B轴转位之前与被测面2相对应的坐标示值,这样就可以解算得到被测面1与被测面2之间距离的测量结果,从而与标称尺寸进行比对以对标定结果的正确性与精度水平进行验证,实验现场如图10所示。保持实验条件相同,对该试验件连续进行10次重复性测量,各次测量结果如表1所示。
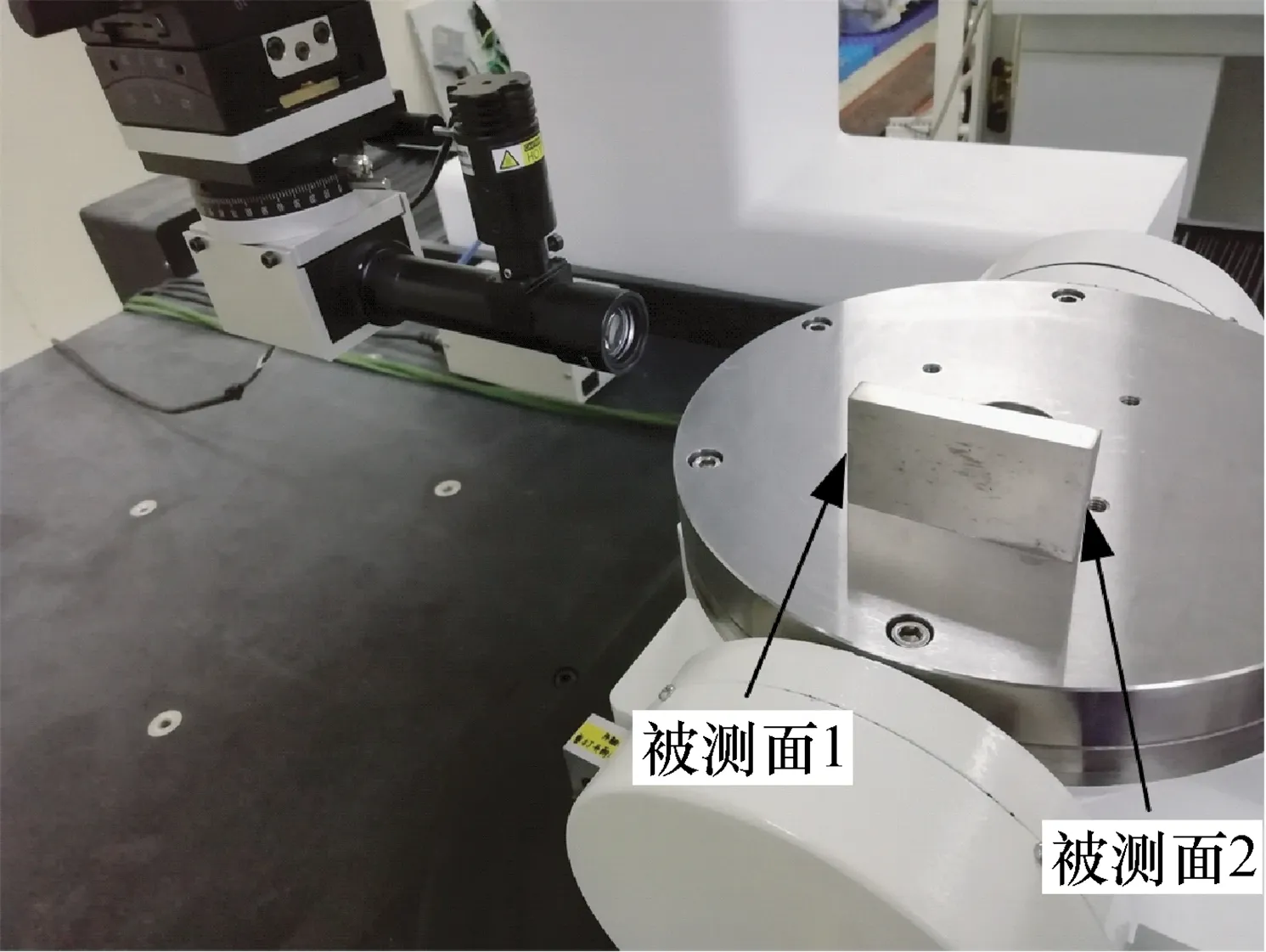
图10 实验现场
由表1中的数据可以计算出:所测长度尺寸的平均值为60.001 6 mm,标准差为0.007 2 mm,各次测量误差均≤±0.012 mm;置信系数取为3,则单次测量的极限误差为±0.021 6 mm。根据气膜孔形位参数的测量要求,该系统的重复性精度水平能够满足相应的测量公差要求。
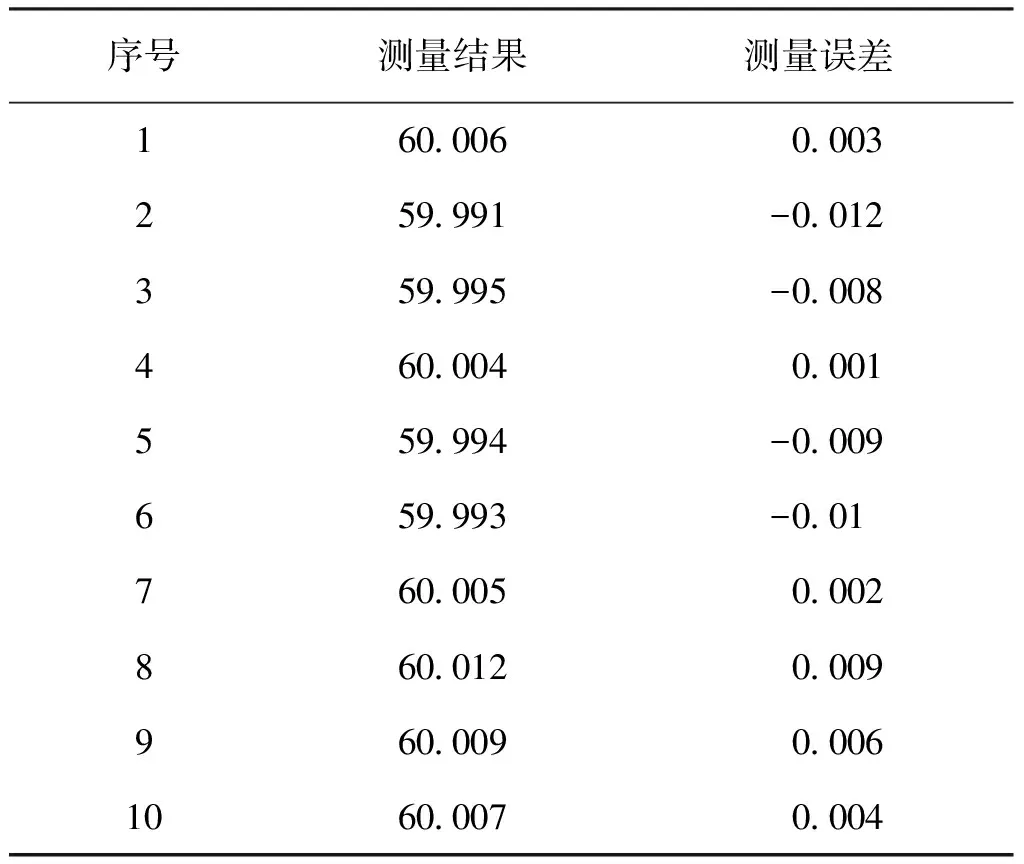
表1 测量结果
5 结 论
搭建了气膜孔五轴视觉测量系统,提出了一种应用摄像机和标定靶标来标定其俯仰轴轴线的空间位置的方法。在标定过程中,首先将定制的标定靶标调整好方位后固定在双轴位置转台上,而后通过三维运动平台带动摄像机运动,在俯仰轴处于0°和90°时,分别使摄像机采集到靶标的前表面与上表面的正焦图像。然后,基于目标棱边的唯一性并通过图像处理与代数运算建立约束条件,最终解算出了俯仰轴轴线的原点OB在机器坐标系O-XYZ中的坐标,从而完成了俯仰轴轴线位置的标定。最后,应用所得标定结果对一个尺寸已知的试验件进行了10次重复性测量,各次测量结果与标称值之间的误差均≤±0.012 mm, 且单次测量极限误差为±0.021 6 mm,能够满足气膜孔形位参数的测量公差要求,从而验证了该标定方法的可行性和有效性。
猜你喜欢
今日农业(2022年4期)2022-11-16
哈尔滨轴承(2022年1期)2022-05-23
北京测绘(2021年7期)2021-07-28
军民两用技术与产品(2021年10期)2021-03-16
房地产导刊(2020年12期)2021-01-14
房地产导刊(2020年12期)2021-01-14
语数外学习·初中版(2020年2期)2020-09-10
现代苏州(2019年16期)2019-09-27
世界农药(2019年3期)2019-09-10
中成药(2017年5期)2017-06-13