基于EEMD-KNN的机车牵引座状态识别方法
2022-09-15 05:25谢锋云姜永奇冯春雨王二化刘翊
机床与液压 2022年13期
谢锋云,姜永奇,冯春雨,王二化,刘翊
(1.华东交通大学机电与车辆工程学院,江西南昌 330013;2.常州信息职业技术学院常州市高端制造装备智能化技术重点实验室,江苏常州 213164;3.国家先进轨道交通装备创新中心,湖南株洲 412000)
0 前言
牵引座位于机车箱体下部纵梁上,是机车关键零部件之一,其作用是将机车产生的牵引和制动作用传递到机车走行部进而实现机车车辆的行进和制动。由于牵引座反复承受和传递机车产生的作用力,因此在机车运行中容易出现裂纹等机械故障,影响机车运行状态。因为机车牵引座在机车安全可靠运行中起到的重要作用,其结构是否安全可靠将直接关系机车运行的安全性。
在以往的机械设备状态识别研究中,由于机械设备的运转存在平稳性和非平稳性,进行振动信号分析是机械设备状态识别的重要方法。振动信号通常涵盖了时间特征、频率特征、能量值、信息熵等多种信息,通过分析这些信息能够了解掌握机械设备运行状态,及时发现设备出现故障情况。所以如何能够准确、快捷地分析采集的信号并最终得到准确分析识别结果成为了众多学者研究的方向。冯春雨在牵引座的故障诊断方法方面进行了很多有益的尝试和研究,特征指标参数采用时域指标和EEMD(Ensemble Empirical Mode Decomposition)分解指标,再用KNN(K-Nearest Neighbor)算法进行识别。但是在时域指标以及EEMD指标选择上还有待进一步的研究,KNN算法输入参数选择上也可以进一步研究。申炎仃等提出了一种改进EMD和小波阈值的方法,用于材料断裂故障的智能诊断。EEMD算法是对EMD算法的改进,可以有效抑制模态混叠现象,具有实际物理意义。在振动诊断过程中模式识别方法的选择也非常重要,目前在模式识别中应用较为广泛的方法主要有K邻近算法(KNN)。HUANG等基于类贡献和特征加权,得到K-最邻近数,与平均距离结合得到最终标签,优化后的KNN提高了分类精度。但是,KNN算法在处理分类决策问题时仍存在不足之处,即样本数量不满足平衡条件时,发生近邻样本容错数量过大现象,导致分类决策出现偏差,进而影响了KNN算法的广泛应用。
机械设备故障诊断技术发展可谓日新月异,很多专家学者都对故障诊断技术应用于机车的故障诊断进行了很多有益的尝试并取得了良好的结果,所以利用振动诊断技术进行牵引座裂纹故障状态识别研究是可行的。因此本文作者提出基于EEMD-KNN算法方法对机车牵引座故障状态进行识别。
1 理论基础
1.1 EEMD
EMD为数据本身驱动的自适应分解方法,可以得到一组包含真实物理意义以及瞬时频率特性的本征模态函数(IMF)。在每个IMF分量中,过零点总数、极值点总数必须相等或者最多相差一个,每个数据点的局部极大值与极小值对应的上下包络线的均值必须等于零。
由于振动信号采集过程中会出现脉冲、间歇性等复杂情况,EMD分解过程可能会出现模态混叠现象。EEMD即集合经验模态分解就是为了解决该问题而产生的,因此EEMD是一种改善了EMD的局限性且非常适合分析非线性、非平稳信号的时频分析方法。EEMD在EMD的基础上,向原始信号中多次增加均值为零、频率均匀的随机白噪声,分解时仍然采用EMD分解方法,最后对IMF分量平均化处理。
EEMD分解步骤为:
(1)向采集振动信号中多次添加随机白噪声序列():
()=()+()
(1)
(2)对()进行EMD分解,重复次,获得组IMFs;
(3)对所有IMFs求平均值,获得最终IMF分量:
(2)
其中:,()为第次EMD分解所得到第个IMF分量。
1.2 KNN
由于KNN算法的简单、便捷、高效性、准确性,成为了应用最广泛的机器学习算法之一。
KNN算法流程的核心思想是统计未知样本周围一定范围内的全部已知点及其类别,然后把样本归为统计量最多的已知点所在的类别。该算法在处理分类决策问题时,只统计最邻近的已知点及其类别,单纯比较已知点数量,进而判定该类别,不需要判断其他类域等问题。因此对于类别之间交叉或重叠较多的待分样本集来说,KNN方法较其他方法更为适合。
KNN的算法步骤如下:
(1)统计未知点一定范围内已知点及其类别;
(2)计算已知点数最多的类别;
(3)将未知点归于上述类别;
(4)一定范围内值一般是根据经验设定的。
2 实验及数据分析
2.1 实验设计
为研究早期裂纹发生以及发展的进程,实验应尽量在同等加工条件下,采用同等材质材料;参考现行车辆段修规程,参照实际牵引座形制以及实际裂纹发生情况,采用15 mm厚钢板制作正常、小裂纹(宽度为1 mm)以及大裂纹(宽度为2 mm)状态的实验模型。实验装置示意如图1所示,实验器材如图2所示。

图1 实验装置示意
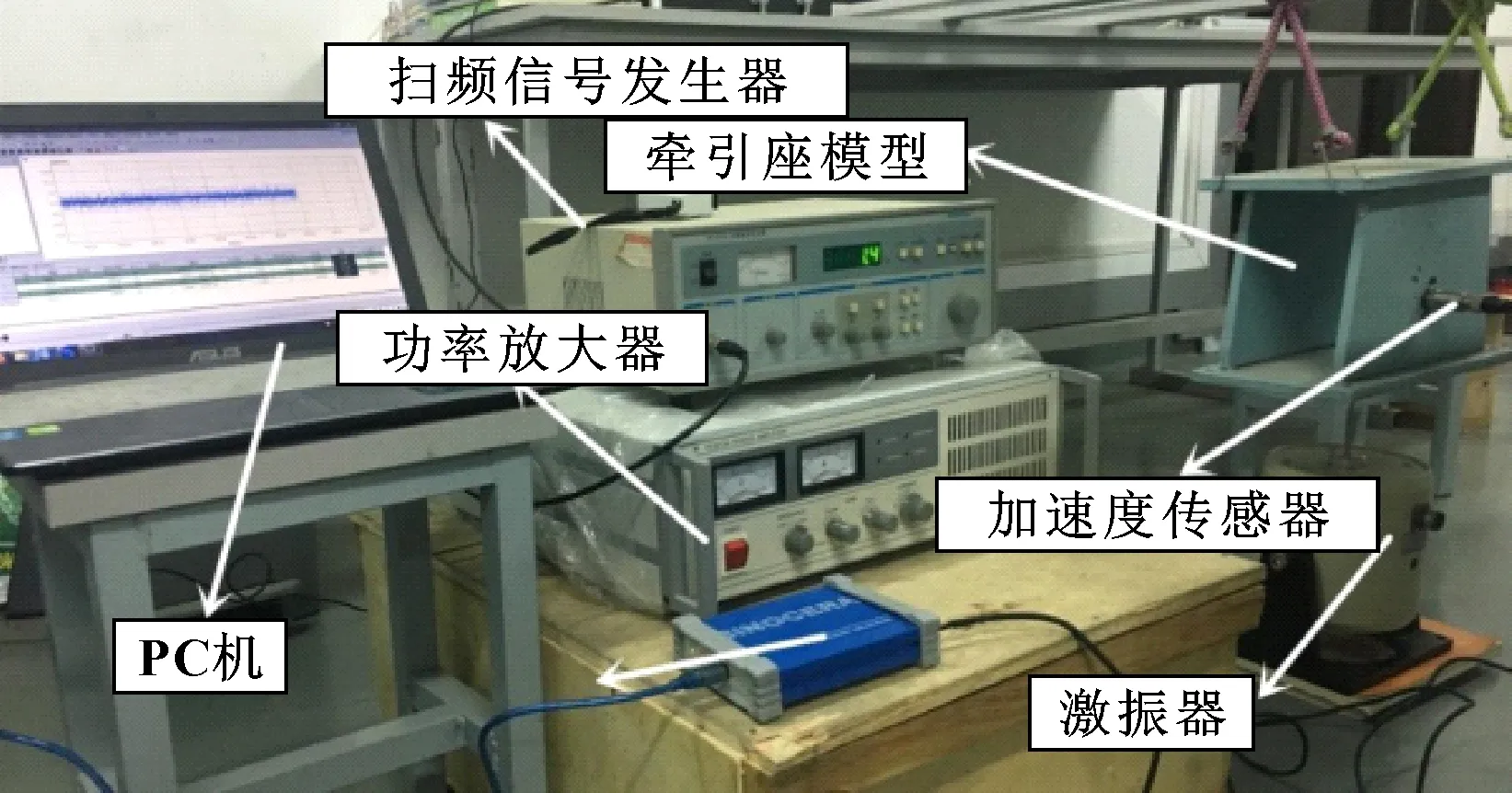
图2 实验器材
数据采集实验过程,利用专业采集信号软件YE7600,调整“示波”、 “零漂采集”等标准,将触发方式设为“定时触发”,采样频率设为12 kHz,采样时长设为5 s,采样间隔设为30 min,以便于设备进行数据采集。为保证数据的有效性和可靠性,采集数据的过程是随机进行的;每种状态分别采集100组数据,一共300组,登记存储数据zc-1,…,100;xlw-1,…,100;dlw-1,…,100。
2.2 数据分析
分别截取上述采集的3种状态(zc-10、xlw-10和dlw-10)数据的某段时长0.5 s、采样点数6 000的数据,绘制原始信号图,如图3所示。
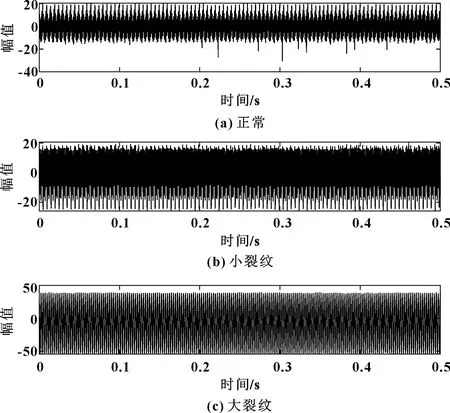
图3 不同状态时域分析图
从图3可以看出:幅值、波形等存在明显变化情况,分别计算时域特征(峰-峰值、方差、峭度),计算结果见表1。

表1 3种状态时域指标对比
表1计算结果的差异性验证了所选时域特征的准确性,将上述时域特征结果合并为时域特征矩阵,记为[,,]。
原始信号经过EEMD分解,得到12个IMF分量和1个残差分量。为了分析这些分量与原始信号的相关性,分别计算每一个分量与原始振动加速度信号之间的相关系数,计算结果如表2所示。
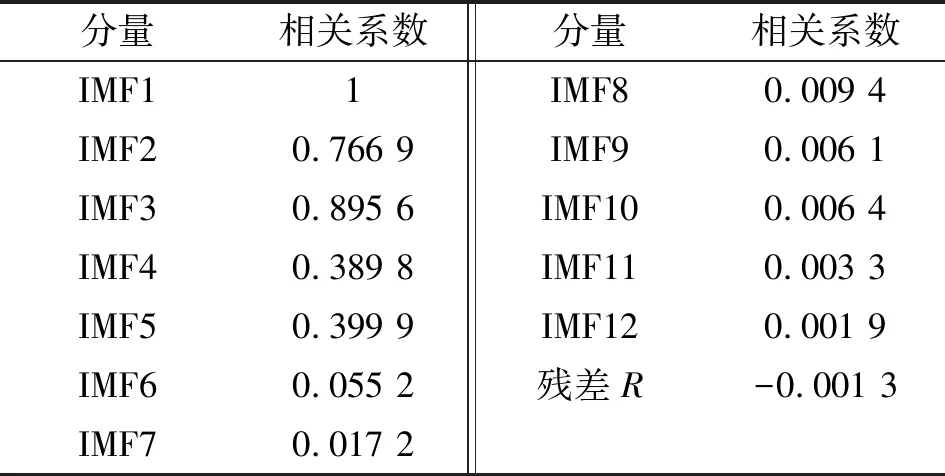
表2 各分量与原始信号相关系数
由表2可以看出:IMF1分量与原始信号的相关系数近似接近1.0,相关系数越大,相关性越好,则所包含的有用信息也就越多;反之则所包含的有用信息较少。综合以上分析,最终选取前5个分量用于后面的状态识别研究。
因KNN算法只能识别量化后的敏感特征参数,将IMF分量波形进行量化的方式是计算各分量能量所占比例,将计算结果记为特征矩阵,记为[,,,,]。
3 牵引座状态识别
3.1 只使用EEMD特征的牵引座状态识别
将上述特征矩阵拆分为KNN的训练集和测试集。240个样本的5个特征作为训练集,42个样本的5个特征作为测试集。对所有样本进行归一化,将正常、小裂纹、大裂纹3种状态的识别结果的标签分别记为00、01、10。经过交叉验证以及比较认为值等于4比较好。只使用EEMD分解得到的分量作为特征矩阵,KNN算法的牵引座状态识别结果如表3所示。
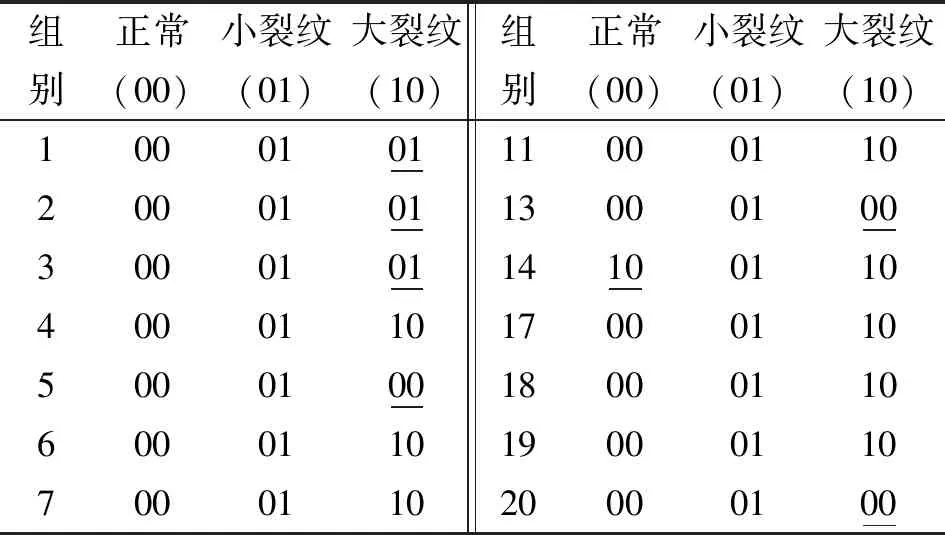
表3 各状态识别结果
在表3中,带下划线的数字表示识别错误。表3显示:所有42个识别结果中,有35个结果识别准确,准确率为83.3%。分析出现这个结果的原因,观察到特征矩阵有些数据相似。
3.2 加入时域特征的牵引座状态识别
分析了EEMD特征矩阵相似性的局限后,再将时域特征加入EEMD特征矩阵构成全新的特征矩阵,即240个样本的8个特征作为训练集,42个样本的8个特征作为测试集,记为[,,,,,,,]。沿用前面的便签,同样对所有样本进行归一化处理。再经过交叉验证以及比较认为值等于6比较好。最终KNN算法的牵引座状态识别结果如表4所示,42个结果识别正确,4个结果识别错误,识别率达到90.5%。表明加入时域特征后KNN算法的牵引座状态识别率更高。
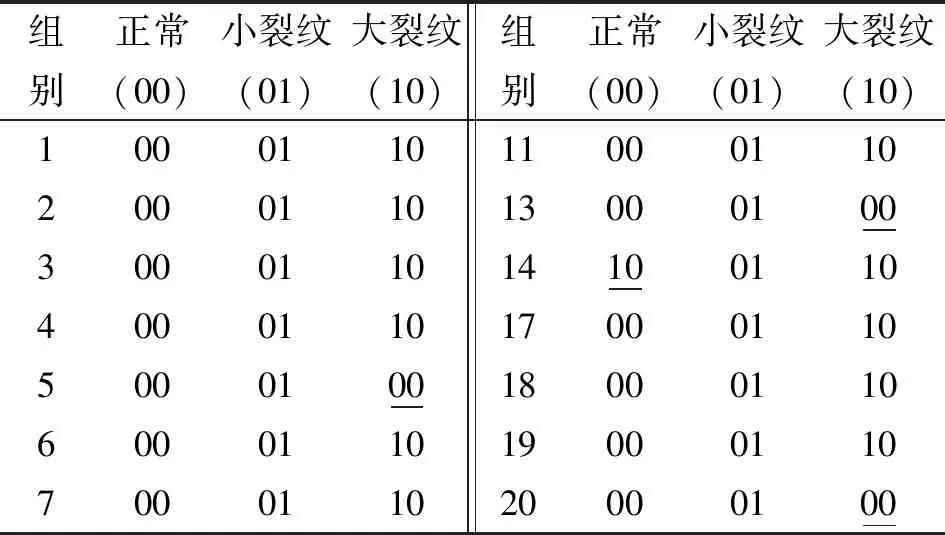
表4 各状态识别结果
4 结论
为了将故障诊断技术应用于牵引座结构缺陷裂纹状态的识别,文中提出将时域、EEMD分解后的时频域特征相结合作为敏感特征矩阵,构建了KNN算法识别模型,针对采集到的振动信号进行了牵引座的3种不同状态识别。结果表明有较好的识别率,达到了83.3%。而且,加入时域敏感特征之后的识别结果显示,KNN算法的识别效果更好,识别率达到90.5%。分析其原因,KNN算法在加入更多特征之后,每个已知点的空间定位更准确了,寻找最邻近的个已知点时距离计算也更加精准,进而提高了KNN识别准确率。由于实验条件和实验平台的局限性,以及KNN及其构建模型的局限性,得到的结果存在一定的失真性和误差,这也为今后提高识别率提供了思考方向和研究侧重点。
猜你喜欢
机床与液压(2022年9期)2022-09-20
领导文萃(2022年11期)2022-06-08
辽河(2022年1期)2022-02-14
辽河(2022年1期)2022-02-14
读者·校园版(2020年19期)2020-09-16
花火彩版B(2020年5期)2020-09-10
智族GQ(2019年9期)2019-10-28
扬子江(2019年1期)2019-03-08
电脑知识与技术(2016年13期)2016-06-29
能源研究与信息(2015年3期)2015-11-18