基于QPSO-MC-GCN的柴油机典型故障诊断方法研究
2022-09-23 01:34廖舒琅毕凤荣田从丰汤代杰
振动与冲击 2022年17期
廖舒琅,毕凤荣,田从丰,杨 晓,李 鑫,汤代杰
(1.天津大学 内燃机燃烧学国家重点实验室,天津 300072;2.山推工程机械股份有限公司,山东 济宁 272073)
柴油机作为最常用的动力机械设备之一,其工作状态将直接影响整个机械系统的安全性和可靠性。在实际生产工作中,为了保证机械设备安全运行、节约机械设备维护与维修成本,对柴油机的运行状态进行实时无拆卸故障诊断十分必要[1]。柴油机的振动噪声信号通常包含大量的机械系统状态信息,是典型的非平稳、非线性时变信号,所以利用振动信号进行故障诊断是一种常用且有效的方法[2]。
振动分析法主要包括振动信号采集、故障特征提取、故障识别与诊断三个步骤,其中故障特征提取最为关键。传统的人为特征提取方法过于依赖先验知识,存在主观性较强和提取效率较低的问题。
深度学习[3]是人工智能领域中的一种特征提取方法,其基于神经网络模拟人脑的传播机制,能够省略手动提取和筛选信号特征的步骤。通过搭建多层网络结构对输入数据进行非线性映射,实现对原始数据集中有价值的深层特征的自动提取[4]。近年来,深度学习被广泛地应用于机械故障诊断领域。Sun等[5]提出了一种基于深度学习网络(deep neural networks,DNN)的稀疏自编码算法,利用无标签的数据集进行特征学习,实现了对异步电机的故障诊断。Zhou等[6]为适应时域振动信号一维的特征,在经典卷积神经网络AlexNet的基础上,提出一种基于一维卷积神经网络(one-dimensional convolutional neural network,1-DCNN)的模型,在旋转机械的振动数据集上实现了精确诊断。Zhu等[7]将注意力机制和Inception网络结构与卷积神经网络进行结合,应用于不同工况下的滚动轴承数据集,均能达到较高的准确率。
但是在上述文献中,并未针对训练样本数量较少的情况进行研究。在实际的工程应用中,柴油机正常样本与故障样本的数量通常不平衡[8],且大部分故障样本难以标记。仅使用有限的有标签样本进行训练,现有模型较难提取其中的敏感故障特征,易出现过拟合现象,泛化性较差。
图卷积神经网络(graph convolutional network,GCN)是由Kipf等[9]提出的基于图结构数据的分类模型,在Cora、Citeseer等引文网络数据集的分类中的准确率和效率均明显优于其他模型。通常一个无向、加权图可以表示为G=(V,E)[10],其中V(vertex)为图上节点的集合,包含每个节点的特征信息,E(edge)为节点间边的集合,用于体现节点与近邻节点之间的关系。
GCN在图域中定义了卷积,通过权值矩阵和邻接矩阵聚合了样本及其近邻样本的属性信息和标签信息[11]。样本特征在有标签样本和无标签样本之间相互传播,实现了对样本深层特征的自动提取,有效解决了训练样本稀少情况下的分类问题。近年来,GCN在互联网技术[12]、有机化工[13]、交通预测[14]、生物医学[15]上都得到了初步的应用,但在机械故障诊断领域发展迟缓,其中如何将时序振动数据转换为图数据成为了亟需攻克的难题。
同时,GCN的分类性能受其关键参数的影响较大,应用于不同数据集中的最优值不同。量子粒子群优化算法(QPSO)[16]是受量子力学的启发,基于PSO算法提出的一种新的优化算法,因其可以同时优化多个参数在参数优化领域应用广泛。针对传统PSO算法存在超参数较多,且易陷入局部最优的问题。QPSO算法省略了PSO算法中速度的部分,参考量子的概念,使得粒子可以到达搜索空间的任意位置,新一代粒子的具体位置由上一代粒子的位置根据Monte Carlo随机方法递推得到[17],提高了粒子位置变化的随机性。
结合以上情况,本文建立一种图数据转换方式,在三个测点的时序振动数据之间建立边连接,并利用双头权值矩阵和一维最大池化层对GCN的模型结构进行优化,同时引入QPSO对模型的关键控制参数进行自适应选取。构造以三个测点的原始振动数据作为输入,包含信息融合、特征提取和模式识别的端到端方法,达到训练样本数量较少情况下对柴油机典型故障进行精确自适应诊断的目的。
1 相关模型简介
1.1 量子粒子群优化算法
QPSO具体计算步骤如下:
(1) 初始化粒子群中粒子的位置。
(2) 计算每个粒子的适应度函数值。
(3) 比较适应度函数值,更新每个粒子的个体最优位置和全局最优位置。
(4) 计算第t次迭代中所有粒子个体最优位置的平均值Mbest(t)。
(1)
式中:M为粒子总数;pbestn(t)为第n个粒子在第t次迭代中的个体最优位置。
(5) 对每个粒子的位置进行更新。
Pn(t)=ε·pbest_n(t)+(1-ε)pbest_all(t)
(2)
(3)
式中:Xn(t)为第n个粒子在第t次迭代中的位置;pbest_all(t)为第t次迭代中所有粒子的全局最优位置;ε和μ是随机数,在(0,1)上均匀分布;±取正负的概率各为0.5;λ为创新因子,是算法中唯一的控制参数。
根据SUN[18]的理论推导和试验验证,λ<1.782时粒子收敛。在实际应用中,λ取值一般小于1。
(6) 粒子收敛后,输出全局最优粒子位置。
1.2 图卷积神经网络
卷积神经网络在计算机视觉[19]和机器翻译[20]等领域获取了巨大的成功,因为权值共享和局部连接两大特性使得它可以在优化较少参数的同时获取较强的平移不变性。图数据作为一种典型的非欧式空间数据,具有局部结构互异的特点[21],这导致传统的CNN无法对其进行处理。
为了解决这一问题,图卷积神经网络结合图谱理论,将传统的卷积算子引入图结构,目前主要分为谱方法和空间方法两类[22]。谱方法将图数据通过拉普拉斯变换映射到谱域,再根据卷积定理定义图卷积;空间方法则通过在节点域定义聚合函数来聚合顶点及其近邻顶点的特征。Kipf等提出了一种介于两种方法之间的近似算法,从谱方法的思想出发,以规范化后的邻接矩阵作为聚合函数,极大地降低了时间复杂度。
邻接矩阵A(adjacency)用于储存图数据中节点间边的集合中的信息,是一个二维数组。若节点x和节点y之间存在边连接e(x,y),则A中的元素axy等于边e(x,y)的权值;若顶点间不存在边连接,则axy=0。
GCN的前向传播过程如下:
(4)

(2) 得到第l+1层的输出矩阵Hl+1。
(5)
式中:H0为输入矩阵;f(·)为非线性激活函数;Wl+1为第l+1层的可训练权值矩阵。
2 基于QPSO-MC-GCN的故障诊断方法
2.1 邻接矩阵的搭建
为实现从时序振动数据到图数据的转换,将数据集中的每一个样本作为一个节点,再通过对样本间距离的加权构建边的集合。目前常用的加权方式有高斯核函数加权、欧氏距离加权和等值加权三种,其中欧式距离加权中节点间距离越远权值越大,不符合本模型的需求,等值加权只考虑了节点之间是否具有连接关系,忽略了节点之间的差异。故采用高斯核函数加权在三个测点间建立边连接,使得距离更近的两个节点之间的边权值更大。为降低计算复杂度,使用每个测点全部样本的均值计算三个测点间统一的权值。建立一种适配于柴油机多测点时序振动信号的邻接矩阵搭建方法,具体步骤如下:
(1) 分别将3个测点所有的样本进行打包构成矩阵S1,S2和S3。
(6)
式中,αi,βi和γi为同一时间分别在测点1,测点2和测点3获取的样本,均为n维行向量,其中m为每个测点样本的总数,n为样本的维度。
(2) 依次计算S1,S2和S3每列元素的平均值,并组成新的行向量y1,y2和y3。
(7)
式中:i=1,2,3;ξ为元素值全为1的m维行向量。
(3) 计算三个测点之间的权值w12,w13和w23。
(8)
式中,σ为热核函数宽度,用于控制映射的范围,其取值是使用高斯核函数的难点。
(4) 利用统一的边权值搭建邻接矩阵A。
(9)
2.2 双头权值矩阵机制
为了提取更丰富的节点特征,参考CNN中多个卷积核的设置,建立双头权值矩阵,即同时使用两个可训练权值矩阵进行计算,具体如下:
(10)
式中,‖表示矩阵的粘合,例如两个2×2的矩阵可粘合为一个2×4的矩阵。因为新的权值矩阵的行向量长度为原来的一半,所以计算复杂度并未增加。
2.3 一维最大池化层
池化层通过对输入矩阵进行子采样,一方面可以降低顶点的特征维度,简化了模型计算的复杂度,另一方面可以有效控制有标签样本数量较少时的过拟合现象[23]。目前常用的池化方式主要分为最大值池化和平均池化两类,前者的效果更好且应用更为广泛。为了适应振动时序信号的维度,在传统GCN的基础上引入一维最大池化层,其中池化核宽度为2,步长为2,其运算方式如下:
(11)
式中,X=[x(i,2j)]∈3m×2n和Z=[z(i,j)]∈3m×n分别为池化层的输入矩阵和输出矩阵,3m为三个测点样本的总数,n为样本输出的特征维度。
2.4 MC-GCN模型结构
多通道图卷积神经网络(multi-channel graph convolutional network,MC-GCN)模型由两个图卷积层和一个一维最大池化层构成,如图1所示。
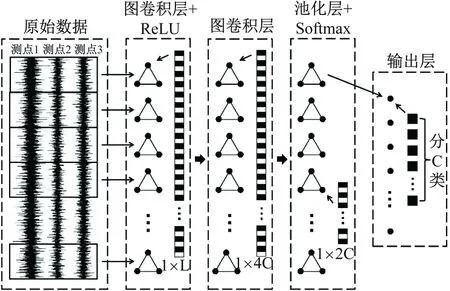
图1 多通道图卷积神经网络模型结构Fig.1 Multi-channel graph convolutional network model structure
其中第一层使用双头权值矩阵,并以ReLU作为激活函数;第二层为传统图卷积层;第三层为一维最大池化层,并使用Softmax分类器对输出进行分类,网络模型如下所示:
f1=ReLU(x)=max(0,x)
(12)
(13)
(14)
式中,X和Z分别为模型的输入矩阵和输出矩阵。
采用交叉熵(cross entropy)损失函数为目标函数对权值矩阵进行反向传播,其计算公式如下
(15)
式中:Vtrain为训练集样本的集合:C为类别的数量;p和q分别为真实标签值和模型输出值,均为行向量;pik为第i个样本的真实标签向量中的第k个元素;qik同理。
缺镁发生原因:首先,酸性土壤和轻砂土中镁容易流失,尤其是山坡地,土壤中的交换性镁含量降低。其次,钾肥和磷施用过多,影响橘树对镁的吸收,容易引起缺镁。此外,果园中过多使用硫磺及石硫合剂药剂,容易使土壤显酸性,导致缺镁。
2.5 QPSO-MC-GCN算法流程
采用量子粒子群优化算法对图卷积神经网络中的两个关键参数学习率k和热核函数宽度σ进行寻优,以实现对不同类型的柴油机故障样本集的自适应诊断。方法的具体步骤如下:
(1) 获取初始样本集X。在柴油机的不同工况下采集三个测点的振动信号,按工作周期截取样本集后对每一个样本作归一化处理和快速傅里叶变换(fast Fourier transformation,FFT)。然后将同一时间采集到的三个测点的样本进行打包,赋予标签后随机进行打乱,最后根据不同比例划分训练集和测试集。
(2) 根据第1.3节搭建邻接矩阵A。
(3) 初始化网络模型。设定QPSO的创新因子λ=0.6,粒子数量为10,学习率k和热核函数宽度σ的搜索范围分别为[0.02,0.03]和[4,5],增设过滤机制忽略范围之外的粒子以提高优化效率。设定MC-GCN的输出层维度与样本类别数量相等,隐藏层维度为输出层的4倍。
(4) 使用QPSO自适应选取k和σ。以MC-GCN迭代75次后训练集的目标函数作为QPSO的适应度函数,粒子收敛后输出优化后的k和σ。
(5) 训练MC-GCN的权值矩阵,目标函数收敛后对柴油机的典型故障进行诊断。
与上述步骤对应的流程如图2所示。

图2 故障诊断流程图Fig.2 Flowchart offault diagnosis
3 柴油机故障诊断实例分析
3.1 数据准备
为了验证方法的有效性,采用实测柴油机的模拟故障振动数据进行分析。该柴油机和测试设备的基本参数如表1和表2所示,试验台架如图3所示,其中柴油机采用刚性连接,测功机通过传动轴与飞轮相连。振动传感器的安装位置参考GB/T 7184—2008《中小功率柴油机振动测量及评级》[24]的要求进行布置。
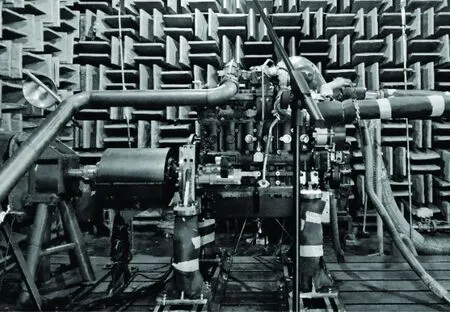
图3 模拟故障试验台架Fig.3 Simulated fault test bench
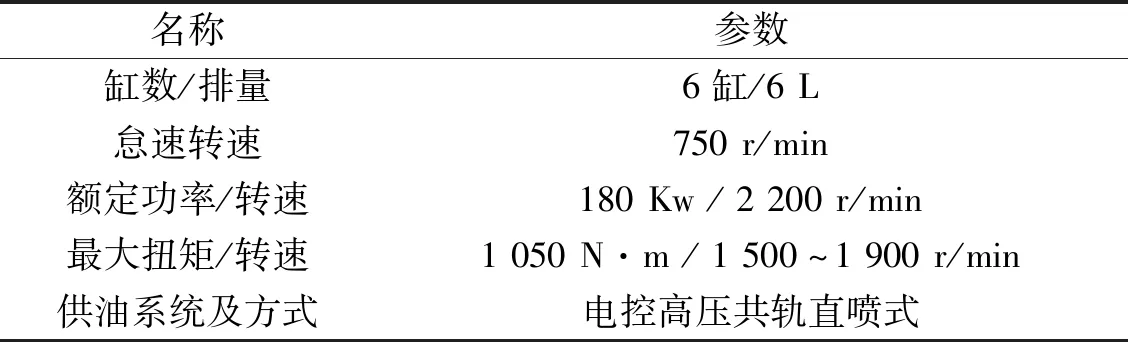
表1 柴油机基本参数Tab.1 Basic parameters of diesel engine
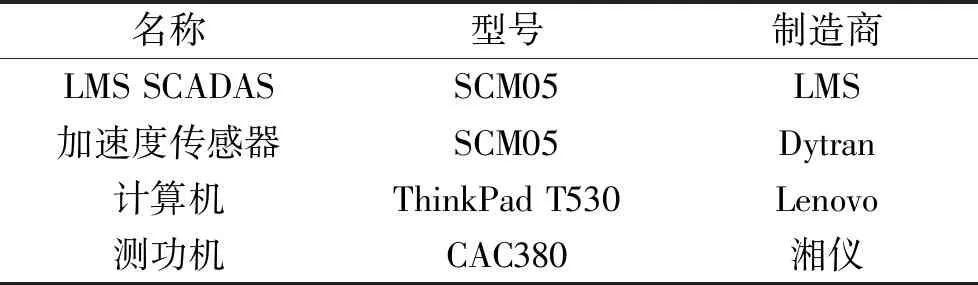
表2 测试设备基本参数Tab.2 Basic parameters of test equipment
试验主要模拟了主喷角度异常、预喷角度异常、预喷油量异常和断缸四种典型故障类型,除断缸以外,其余三种均为6个缸的统一故障模拟。具体如表3所示,分别构成4个数据集,其中括号内为正常状态。
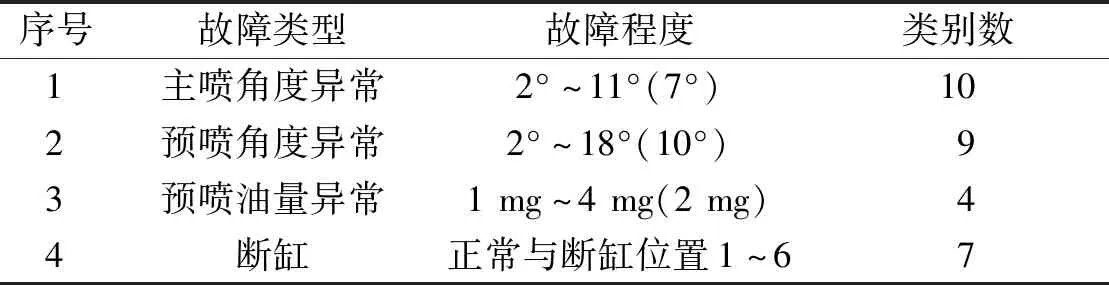
表3 模拟故障类型表Tab.3 Diesel engine detailed parameters
本章选取该柴油机最大扭矩点附近的工况(满载1 500 r/min)作为试验工况,因采用的为四冲程柴油机,故其曲轴旋转2 r为一个工作周期(0.08 s),结合采样频率12.8 kHz,计算得到柴油机每个工作周期的采样点数为1 024。为保证截取后的样本均包含一个完整的周期,设置初始样本的长度为1 024,如图4所示为一个周期的实测振动信号。
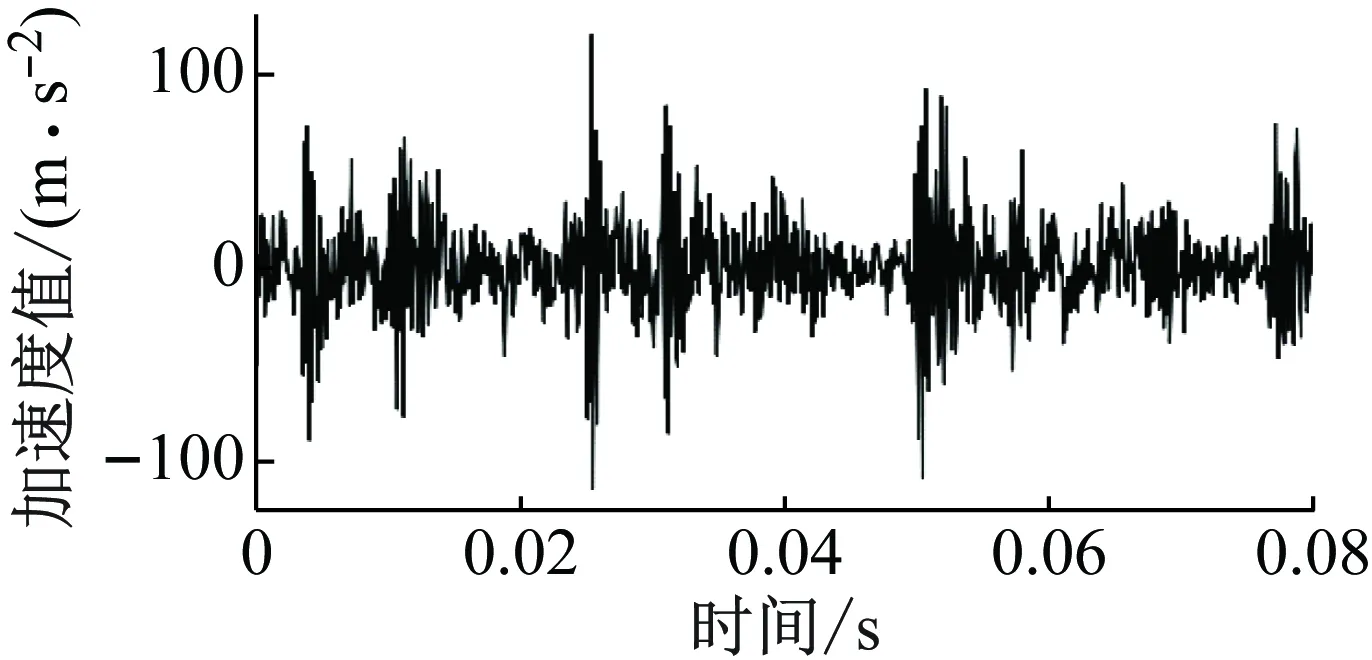
图4 实测振动信号的波形图Fig.4 Waveform of measured vibration signal
3.2 测点数量的确定
柴油机表面的振动响应信号是多个激励源的综合反映,但在传播过程中其振动幅值存在不同程度的衰减。另外由于故障时的异常振动是由多个方向传递到机体的,不同测点采集到的信号中包含的瞬态冲击成分不同,所以只对单一信号进行分析可能导致敏感信息的丢失。但是测点数量的增加不仅会提高使用成本,而且易受到噪声信号的影响。故利用表3中的1号数据集进行分析,包含10个类别的样本,单测点每类取10个训练样本和190个测试样本组成样本集。利用训练样本对模型进行训练,通过测试样本对模型性能进行评定。仅改变使用的测点数量,结果如图5所示。
由图5可得,当测点数量增加至3个后,诊断准确率达到一个较高值并趋于稳定。当测点数量大于4个后,诊断准确率出现下降趋势,故最终确定测点数量为3个。如图6所示,选取柴油机支承端位于柴油机中部的点,曲轴平面位于柴油机中部的点和机架顶部边缘位于联轴器端部的点作为试验测点。
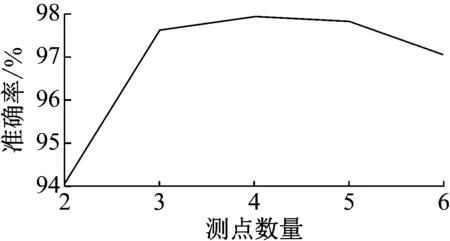
图5 测点数量对模型性能的影响Fig.5 Influence of the number of measuring points on the performance of the model
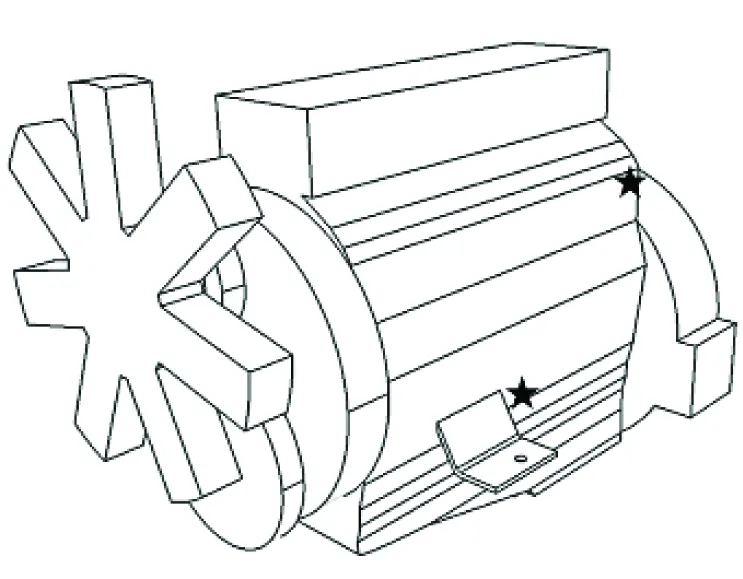
图6 测点位置Fig.6 Measuring point position
3.3 模型训练过程和结果
确定测点数量后,将第3.2节中测点数量为3的训练过程和结果进行直观展示。QPSO的寻优过程如图7所示,寻优后k和σ的取值分别为0.024和4.421。MC-GCN的训练过程如图8和图9所示,可见模型在迭代100次后基本保持稳定,对测试集的诊断准确率可达到97.63%。
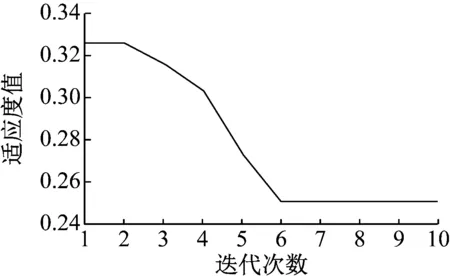
图7 QPSO寻优过程Fig.7 QPSO optimization process

图8 训练集训练过程Fig.8 Training set training process
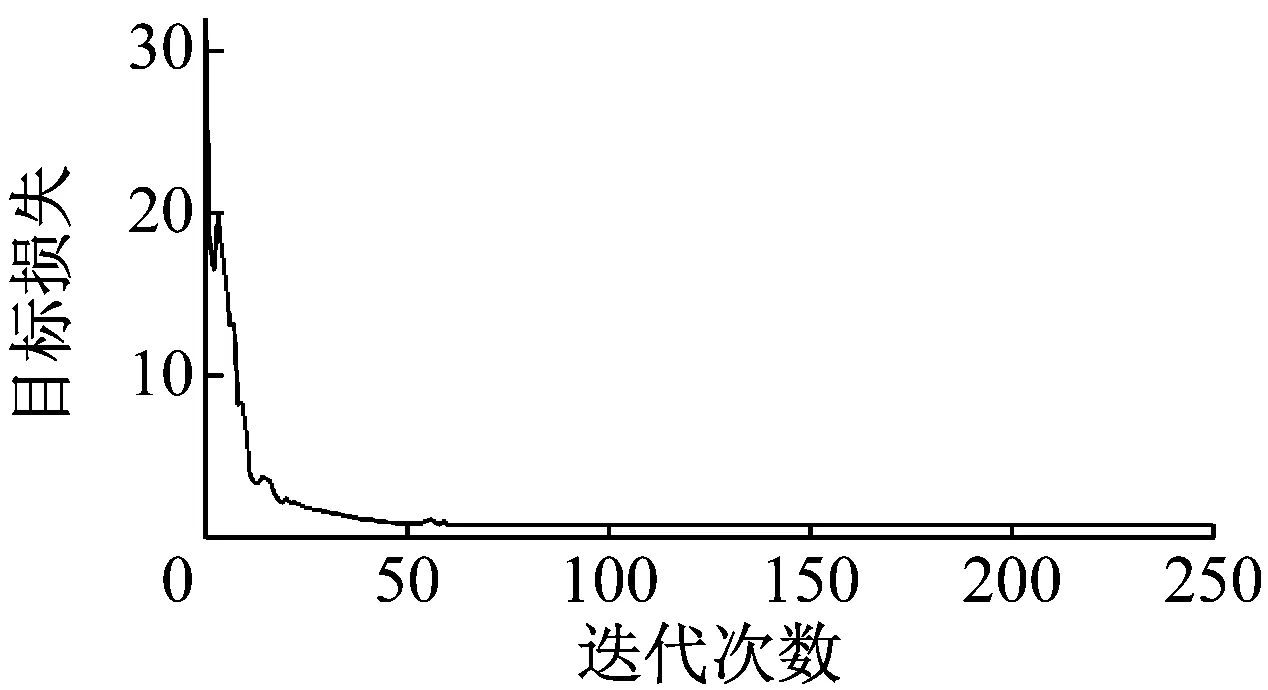
图9 测试集训练过程Fig.9 Test set training process
为进一步验证方法对于原始时域振动信号的特征提取能力,采用流形学习中的t-SNE算法[25]分别对测试集的输入和输出进行可视化分析。其通过计算不同样本之间的相似性并转换为条件概率,以实现对高维数据集的降维。初始样本集的分析结果如图10所示,振动信号的冗余性导致不同类型的故障样本混叠在一起,不具备可区分性。经过QPSO-MC-GCN模型的深层特征提取后,分析结果如图11所示,可见各类样本之间仅存在少量混叠,聚类效果较好。
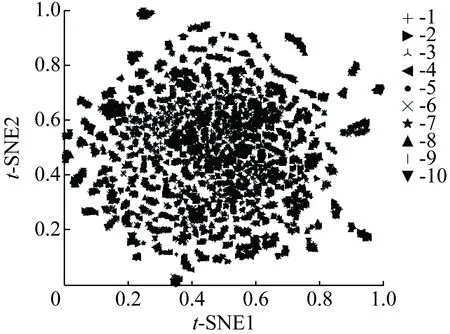
图10 原始数据可视化结果Fig.10 Raw data visualization results
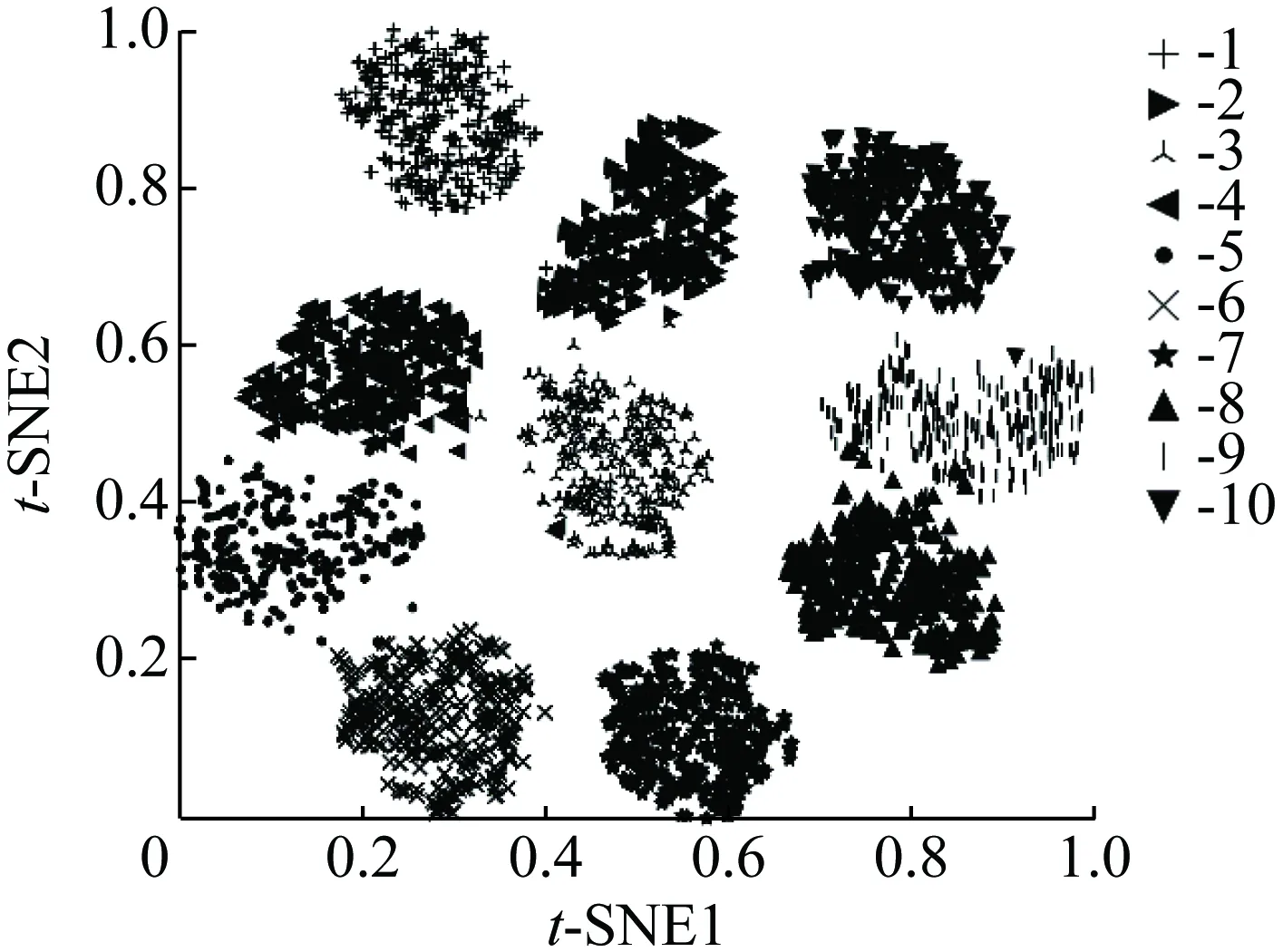
图11 输出数据可视化结果Fig.11 Output data visualization results
根据以上结果,说明基于QPSO-MC-GCN的方法在训练样本数量较少时能够提取出原始时域振动信号中的有价值信息,同时实现信息在不同测点样本之间的相互传播,实现对柴油机典型故障的精确诊断。
3.4 优化效果分析
为了验证论文对模型的优化效果,在传统GCN的基础上分别单独引入一维池化层、双头权值矩阵机制和QPSO,再与本文方法进行性能对比试验。其中传统GCN的前向传播模型如下:
(16)
对于不引入QPSO的模型,学习率k取QPSO搜索范围的中间值0.025,热核函数宽度σ取y1,y2和y3之间欧氏距离的平均值,如下式所示。
(17)
式中,yi由公式(7)计算得到。
采用与第3.2节相同的样本集进行诊断,结果如表4所示。由表可得,单独引入一维池化层、双头权值矩阵机制和QPSO后,诊断准确率分别可以提高1.69%,1.53%和1.90%,而基于QPSO-MC-GCN的方法可以将诊断准确率提高2.95%,有效验证了优化效果。
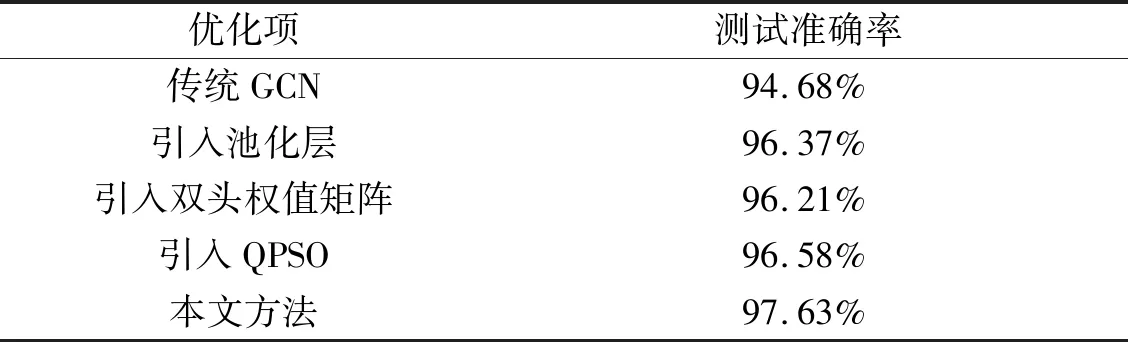
表4 优化效果分析Tab.4 Optimization effect analysis
进一步引入混淆矩阵对各个类别的分类效果进行直观展示,优化前和优化后的测试集诊断结果如图12和图13所示。图中横坐标表示真实标签,纵坐标表示模型预测标签,标签1~10依次表示主喷角度为2°~11°的十种状态。以主喷角度为2°的样本为例,有99%的样本诊断正确,有1%的样本被错误诊断为3°。
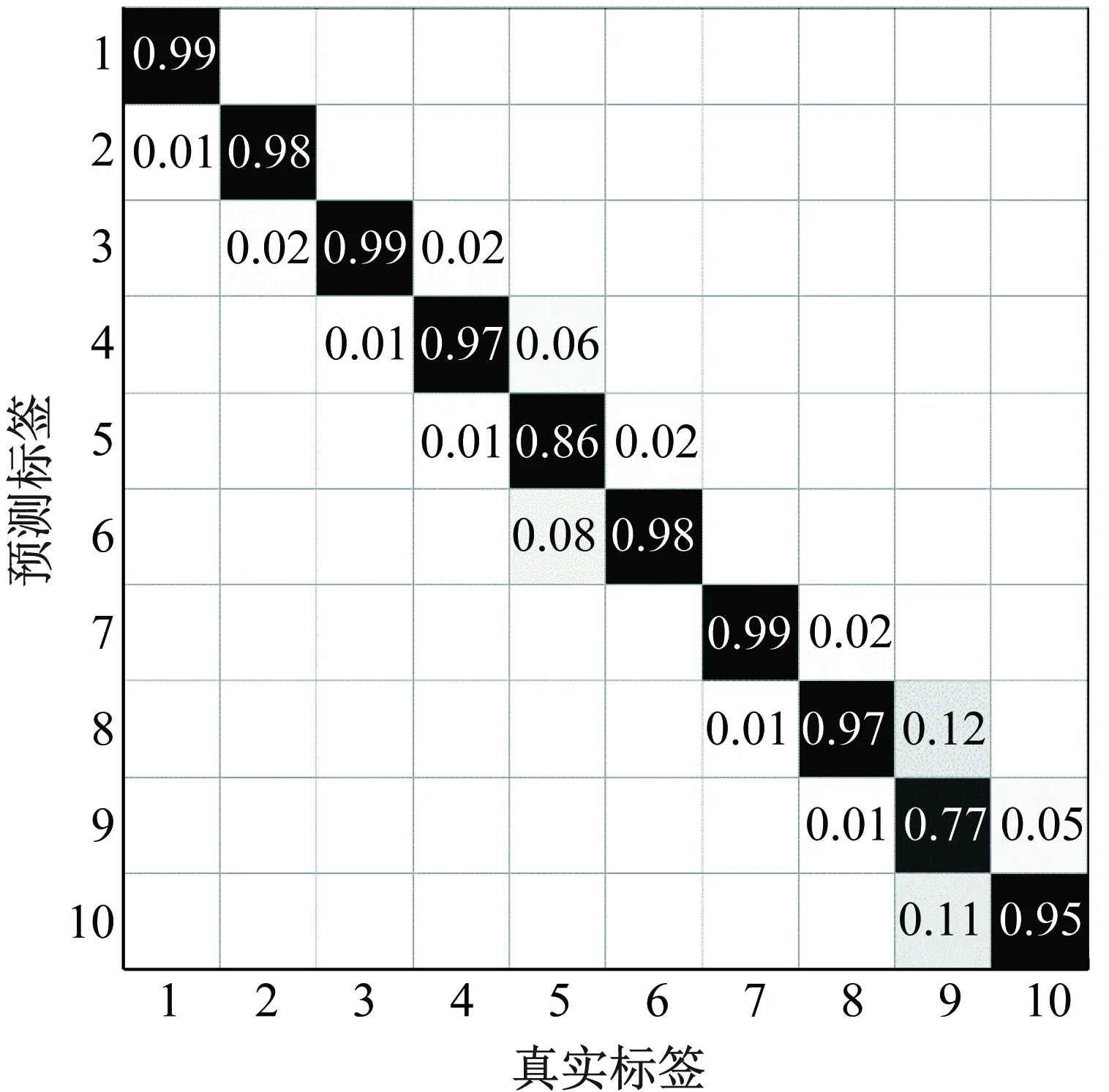
图12 优化前混淆矩阵Fig.12 Confusion matrix before optimization
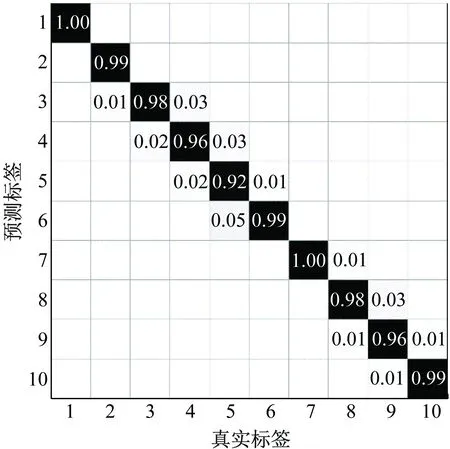
图13 优化后混淆矩阵Fig.13 Confusion matrix after optimization
由图可见,模型对测试样本集的最大诊断误差仅为1°,但是优化前对于主喷角度为6°和10°两种状态的诊断效果不佳,准确率仅为86%和77%。而优化后,这一现象得到了明显的改善,模型对大部分类别的诊断准确率均能够达到98%以上。
3.5 方法对比试验
为体现本文方法在训练样本数量较少时的优越性以及在不同数据集上的自适应性,采用支持向量机(support vector machine,SVM)、单通道一维卷积神经网络(single-channel 1DCNN,SC-1DCNN)、多通道一维卷积神经网络[26](MC-1DCNN)、单通道图卷积神经网络[27](SC-GCN)进行对比分析。其中,SVM采用Linear作为核函数,惩罚系数取1;SC-1DCNN和MC-1DCNN均使用4个卷积层、4个最大池化层和1个全连接层构成的模型,使用Tanh函数和ReLU函数作为激活函数;SC-GCN由2个图卷积层构成,通过k-近邻图构建邻接矩阵,使用ReLU函数和Softmax函数作为激活函数。
定义标签比为训练集样本数占样本集总数的比值,在不同标签比条件下分别对不同程度的主喷角度异常、预喷角度异常、预喷油量异常和断缸四种典型故障类型进行诊断,其中每种故障类型的单测点单类样本总数为200个。对于多通道方法,同时输入三个测点的样本;对于单通道方法,依次输入单测点的样本,最后取三个测点准确率的均值。试验结果如表5所示。
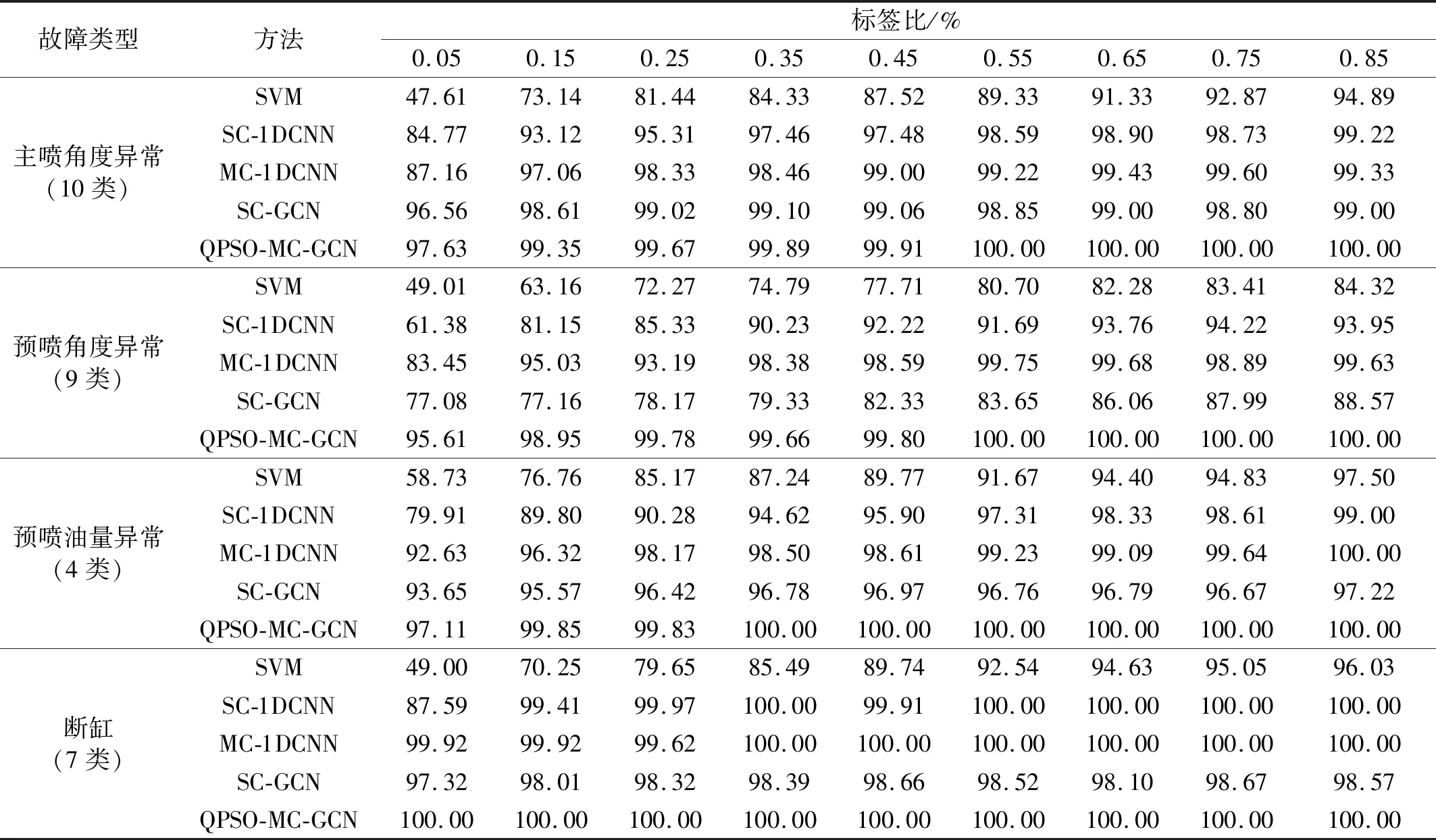
表5 本文方法与其他方法诊断准确率对比Tab.5 Comparison of recognition accuracy between QPSO-MC-GCN and other methods
由表可得,在低标签比条件下,SVM出现了过拟合现象,对四个样本集的平均诊断准确率仅为51.09%,无法对柴油机典型故障进行有效诊断,SC-1DCNN、MC-1DCNN和SC-GCN的诊断性能也随着标签比的降低有明显的衰退。且因为关键控制参数无法针对不同样本集进行自适应寻优,前四种方法应用于不同样本集的诊断结果差异较大。基于QPSO-MC-GCN的方法摆脱了对标签比的依赖,对不同类型的样本集进行诊断时均能保持结果稳定,综合性能优于其他几种方法。
4 结 论
论文针对柴油机典型故障诊断中有标签样本数量较少的问题,建立一种基于量子粒子群算法和图卷积神经网络的故障诊断方法。主要工作如下:
① 将图卷积神经网络应用于柴油机故障诊断领域,省略了传统方法中需要人工提取和选择特征的步骤,在不同标签比条件下均能保持较高的故障诊断准确率,实现了端对端的故障诊断。
② 建立一种适配于柴油机多测点时序振动信号的邻接矩阵构建方式,利用高斯核函数衡量测点间的相互关系,在三个测点之间建立边连接,将三个测点样本特征映射到同一空间,实现有效融合。
③ 采用量子粒子群优化算法对图卷积神经网络中的学习率k和热核函数宽度σ进行寻优选取,摆脱了对人工的依赖,使得方法应用于不同类型的数据集时具备较好的泛化能力,并增设过滤机制只保留范围以内的粒子以降低计算复杂度。
④ 相对传统图卷积神经网络,建立双头权值矩阵,并引入一维最大池化层。通过双头权值矩阵提取更丰富的深层特征,通过池化进一步抑制低标签比条件下容易出现的过拟合现象。
⑤ 采用某型6缸柴油机的实测时序振动信号对SVM、SC-1DCNN、MC-1DCNN、SC-GCN以及基于QPSO-MC-GCN的方法进行对比试验,验证了方法的有效性和优越性。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
制造技术与机床(2022年2期)2022-02-22
汽车实用技术(2021年10期)2021-06-04
邮电设计技术(2021年2期)2021-03-13
天津城建大学学报(2020年4期)2020-09-10
汽车与新动力(2019年5期)2019-11-07
汽车观察(2019年2期)2019-03-15
计算机与数字工程(2018年5期)2018-05-29
计算机测量与控制(2018年3期)2018-03-27
汽车与新动力(2015年1期)2015-02-27