FPSO原油外输光电辅助决策系统的设计与应用
2022-11-03 14:05朱进全杨学利孙恪成刘东辉牛志刚
应用光学 2022年5期
朱进全,杨学利,孙恪成,刘东辉,牛志刚
(中海油能源发展股份有限公司采油服务分公司,天津300452)
引言
浮式生产储卸油装置(FPSO)是一种可对海上油田进行全海式开发的工程装备,其主要优势在于集油气生产处理、原油储存、外输功能于一体,并具有良好的水深适应性[1]。由于FPSO 具有很大的水线面面积,导致其运动对环境载荷的影响十分敏感且容易产生很大的波频与低频运动[2-3]。FPSO 在原油外输作业期间会经历不同的装载体变化,遭遇不同的风浪流组合作用等[4-6],此外还存在人为操控等影响,上述外部作用力会驱动浮体间发生相对运动,导致系泊大缆断裂或船舶碰撞或海面溢油等风险增加[7-9],并使外输操控变得复杂。因此,对外输作业环境、系泊大缆拉力、海面溢油、FPSO 与穿梭油轮之间夹角和间距的实时监控十分必要[10-12]。
随着各种传感器技术的不断进步,监测内容和监测手段也越来越丰富。相比于其他传感器,光电传感器更易于监测和实施,在船舶监测上的应用也引起更多学者的关注[13-14]。海洋平台监测需要的传感器种类多,接口繁杂,所有数据都需要同步釆集,并且传感器采集的数据还需要进行实时解算处理,因此,要求数据采集系统具有良好的接口扩展和数据实时处理能力。
采用卫星高精度差分定位方法可得到FPSO、穿梭油轮的经纬度和航向,进而计算出两艘船舶之间的相对夹角和间距[15]。但由于穿梭油轮不固定,故此监测方法必须在穿梭油轮上安装包括GPS组合惯导系统的移动测量站(约15 kg),所以便携性不足。本文基于安装在FPSO 船艉的光学探测设备直接测出FPSO 与穿梭油轮之间的夹角和间距,提油船长只需携带一个便携包(手持基站和平板电脑,约3 kg),极大地提高了便携性。
1 系统描述
1.1 技术需求
根据对危险状态的原因分析及海上原油外输作业的需求,通过集成风速风向仪、AIS系统、系泊大缆拉力仪、光电测量系统等设备的监测信息,建立一套能够对系泊大缆拉力、风浪流、船舶相对位置及海面溢油进行实时监测的系统,可对FPSO 和穿梭油轮之间夹角的运动趋势进行预测,并对外输危险状态实施预警,为外输人员指挥决策提供支持。
1.2 技术方案
系统的硬件由FPSO 上可集成设备和光电测量系统组成。FPSO 上可集成的设备包括风速风向仪、系泊大缆拉力仪、AIS系统、浪流仪等;光电测量系统主要包括光电转台、高清摄像机、激光测距机、激光照明器、红外热像仪、光谱检测仪、伺服控制器、视频跟踪器、视频光端机、无线传输基站、电源通信箱等设备,如图1所示。
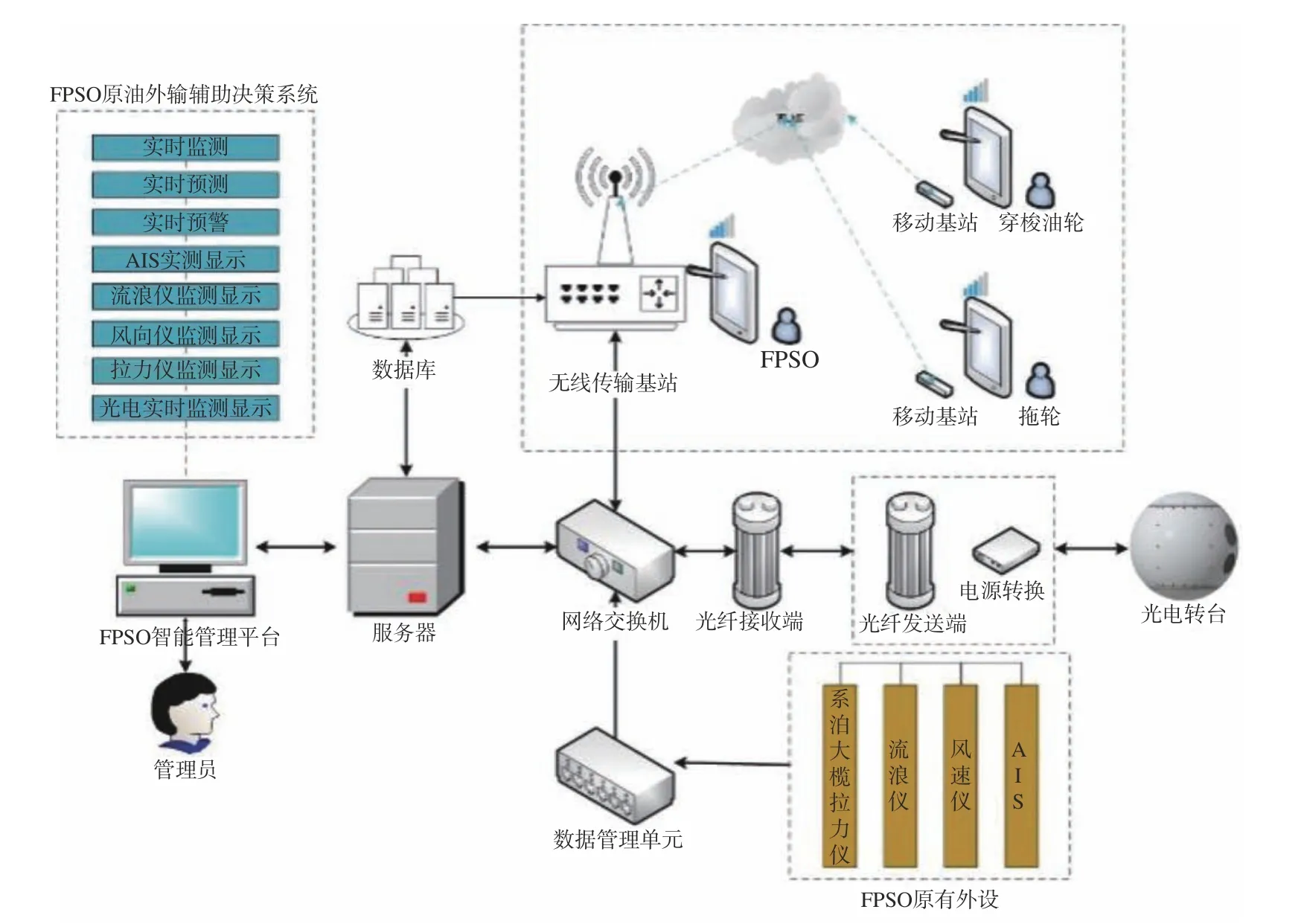
图1 系统总体结构示意图Fig.1 Schematic diagram of overall structure of system
图1 中,软件系统主要包括主控软件和手持终端软件,用于实现集成设备的信息监测,如风速风向、系泊大缆拉力、AIS 系统监测船舶的经度、纬度和航向、以及光电设备的各类监测信息等,并预留数据接口,保证系统的可拓展性和兼容性。软件系统有多种工作模式可供选择,如默认值模式、自赋值模式等。在自赋值模式下,软件操作人员可自行录入相关参数进行数据分析。软件系统提供船体资料的输入窗口,以适应不同类型穿梭油轮和拖轮作业时的差异性。
2 系统软件设计
2.1 设计要求
软件系统主要用于配合下位机进行数据采集、处理、存储,一方面使系统拥有了指标分析以及对下位机进行控制的能力,方便用户对多种数据进行实时监控;另一方面可以将数据完整地存储到数据库中,方便用户随时进行分析和查阅。
软件系统开发采用微服务架构Coframe 集成模式,各接口通信协议满足FPSO 智能管理平台的规定。同时,还需满足如下设计要求:
1)可对系泊大缆拉力、风浪流、船舶位置以及海面溢油进行实时监控;
2)可将采集的数据按照原有的特性进行数据回放和存储;
3)可对下一时段FPSO 与穿梭油轮之间的相对夹角的运动趋势进行预测;
4)在出现危险时,及时通过预警界面进行报警,并出现相应的提示;
5)服务器和移动终端需同时显示实测、预测以及预警信息。
6)明确解析数据种类要求和数据呈现方式。
2.2 开发环境及运行平台
基于本项目的目标及使用环境,选择Vue.js 作为前端开发工具。此外,系统使用Java 微服务架构作为后端开发工具。根据软件运行及需求的分析,FPSO 原油外输辅助决策系统的运行组件主要由web 服务器/GIT/API 网关、日志中心、监控中心/配置中心/注册中心及数据库组成,系统运行方式如图2所示。
图2 中,系统运行由传感器接口、服务器管理员、数据库、FPSO 原油外输辅助决策系统、FPSO智能系统、移动终端用户组成。
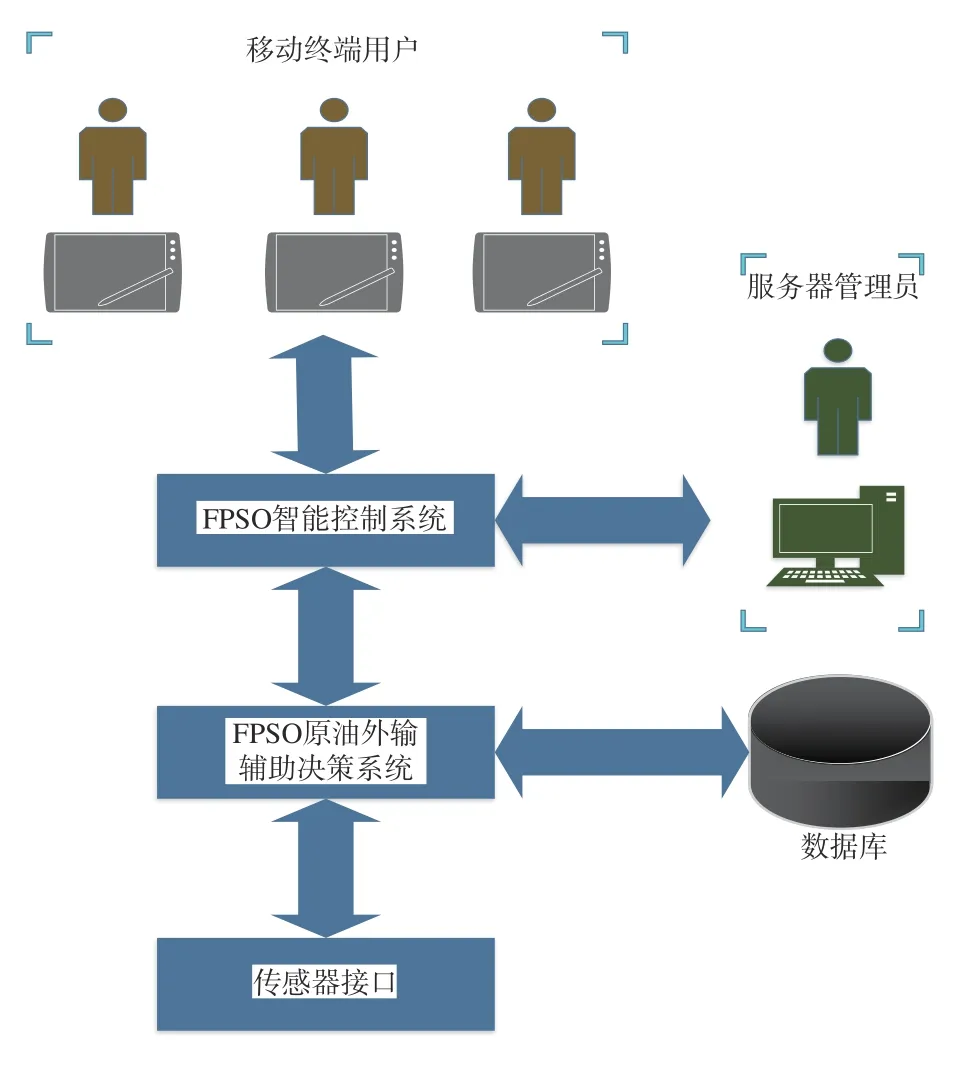
图2 系统运行方式示意图Fig.2 Schematic diagram of system operation mode
2.3 功能设计
2.3.1 实时监测功能
实时监测功能是基于设备采集到的数据,经过数据处理后,以数字、视频和图表方式实时显示在软件系统界面上。实时显示的参数有:风速风向,浪高浪向,流速流向,系泊大缆拉力,光电测量系统监测的FPSO 与穿梭油轮之间夹角和间距、海面溢油监测信息,AIS 系统显示的FPSO、穿梭油轮和拖轮三者的经度、纬度及航向数据等;可选显示内容有潮汐、雷暴等气象信息。
当数据量很大时,对数据库的装载与导出、备份与恢复、结构的调整、索引的调整等都会让数据库停止服务或者高负荷运转很长时间,从而影响数据库的可用性和易管理性。
以实时数据采集频率1 Hz(不包含人员信息表、系统日志表、配置记录表、船型表、消息记录表和船长日志表等)来计算,每秒可产生20 行数据,1 h 为72 000 行数据,每包数据所占的字节空间 最 大 为200 B,1 h 存 储 数 据 所 占 的 空 间 为14 400 000 B 也就是13.73 MB。通过以上计算可知,1 h 最大存储13.73 MB 的数据,假设一次外输作业为24 h,则要存储329.52 MB 数据,500 GB 的数据硬盘能支持做1 553 次数据采集。
数据库设计包括:物理状态设计、表设计、表关联设计、数据库监控、数据库存储过程设计、数据库查询过程设计等。数据库软件功能在后台运行。后面介绍数据存储模块和数据查询模块。
2.3.2 实时预测功能
实时预测功能是基于实时监测300 s 内FPSO与穿梭油轮之间相对夹角数据,通过数学模型计算得到FPSO 与穿梭油轮未来一段时间内的相对夹角,以文字、曲线、船舶示意图形式呈现,并带入实时监测数据进行修正,经多次解算与修正后最终实现较高预测准确率。
采用IBM SPSS 数据分析软件,分析实时测量的夹角。分析结果表明,夹角随着时间的变化在一定范围内上下浮动,夹角的变化趋势在不同的时间段所构建的曲线形式是不同的,故采取多种函数关系进行验证。
假设预测夹角为一个未知量,时间为变量,相对夹角是因变量,其预测曲线如图3所示。由图3(a)~3(d)可知,基于IBM SPSS 软件,在外推60 s、120 s 和300 s 这3 种条件下,分析线性函数、二次函数、三次函数、逆函数等函数关系的适用性。分析结果表明,三次函数关系的R2值最大,即三次函数适用性最佳。建立数学模型如下:

式中:t为外输作业时间,单位s;d0、d1、d2、d3为待定系数;f(t)为FPSO 与穿梭油轮相对夹角,单位(°)。
图3 中R2的含义为自变量所能解释的方差在总方差中所占的百分比,取值越大,说明模型的效果越好。即回归关系可以解释因变量R2×100%的变异,如果控制自变量的值不变,则因变量的变异程度平均会减少R2×100%。
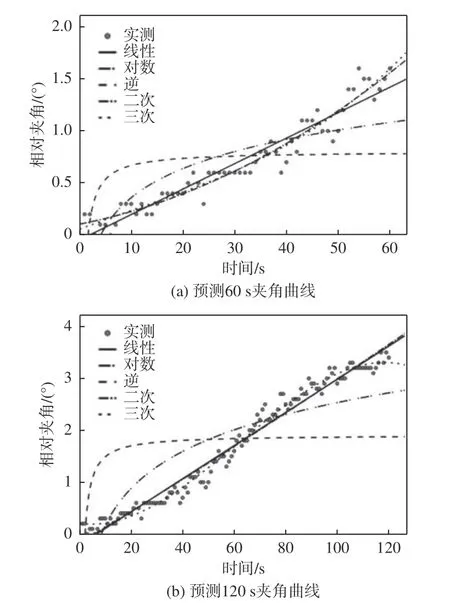
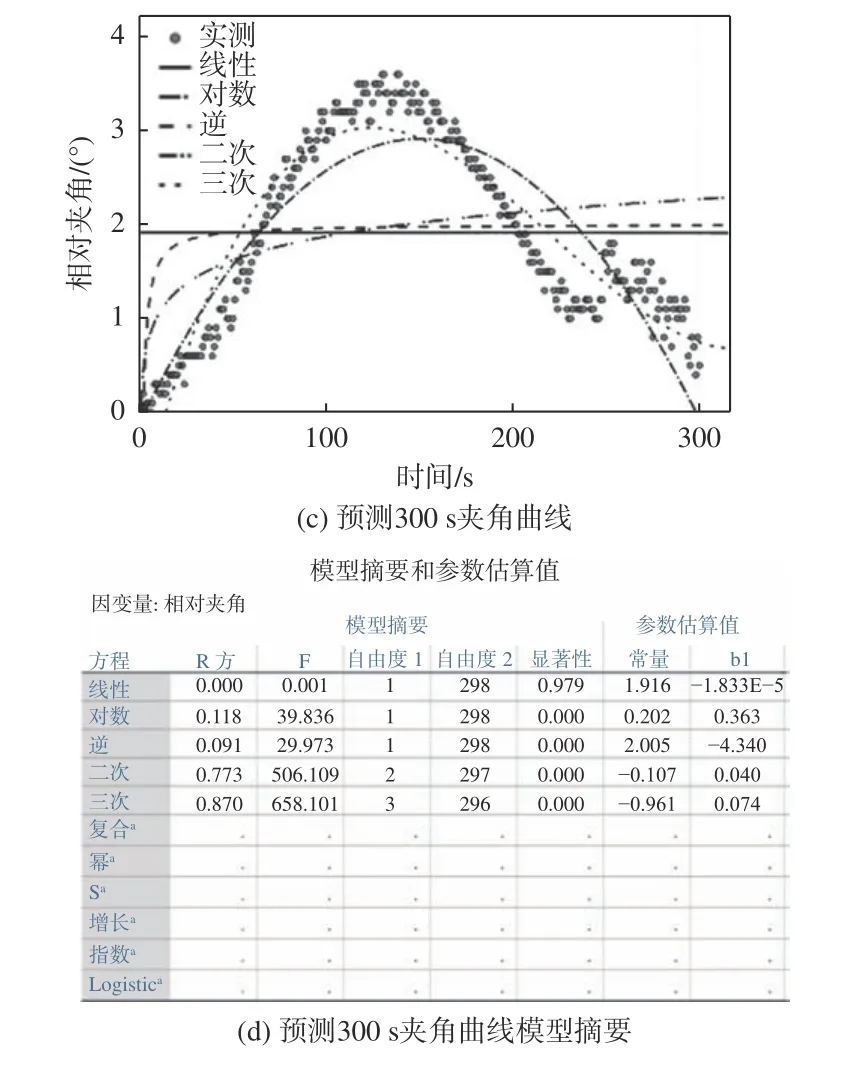
图3 预测相对夹角曲线分析图Fig.3 Analysis diagram of prediction curves for relative included angles
在实际外输中,将相对距离、相对夹角以及预测的相对距离和夹角等历史数据经数据库查询后导入Excel 处理,分别生成相对距离和相对夹角的拟合曲线,如图4所示。其中蓝色为实时数据,红色为1 min 预测数据,绿色为5 min 预测数据曲线。
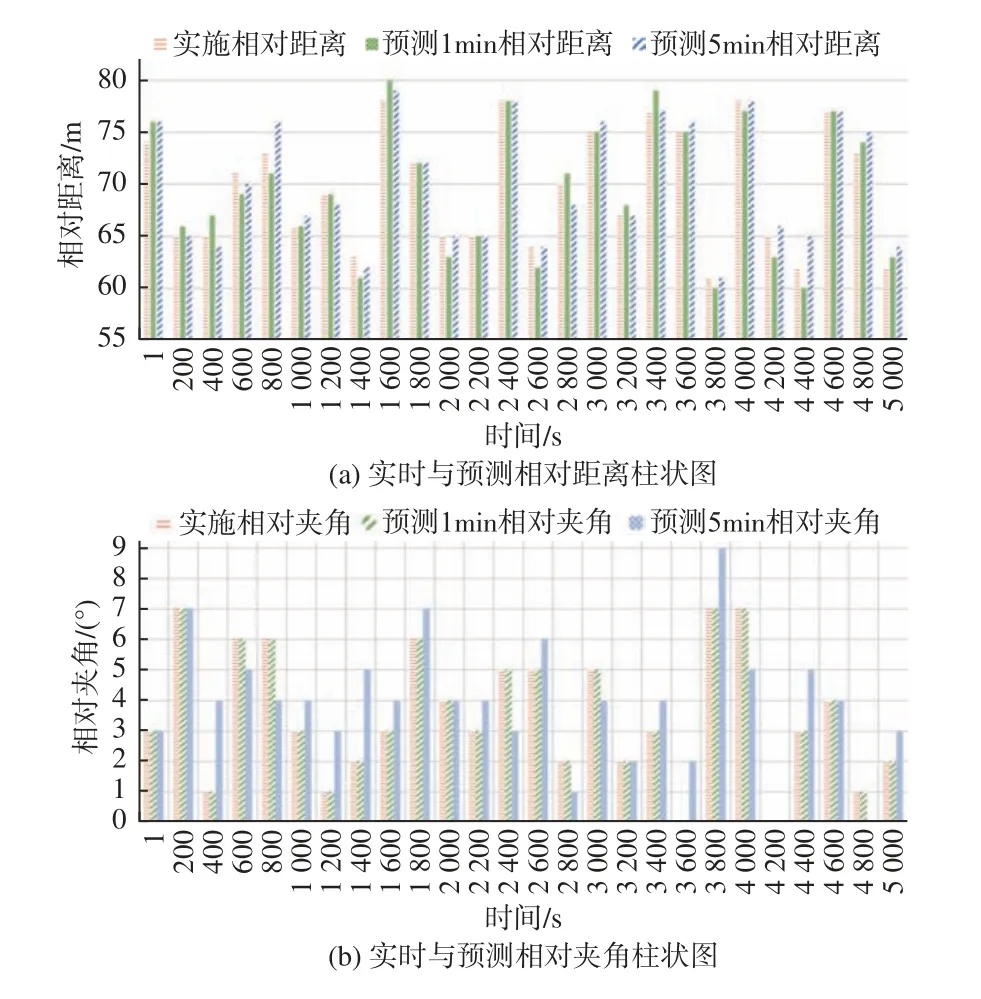
图4 预测相对距离、夹角曲线实时图Fig.4 Real-time diagram of prediction curves for relative distances and included angles
由图4 可看出,数据算法中相对距离和相对夹角拟合较好,数据符合程度高。FPSO 和提油轮预测数据与真实数据进行比对可知,位置数据在4 m之内,夹角在±2°之内。由于FPSO 与提油轮载重比较重,运动相对缓慢,对数据的预测算法可以满足系统要求。
2.3.3 实时预警功能
根据FPSO 外输作业应急反应程序等规定,对本系统的实时监测数据和运动状态预测结果划分危险状态预警等级。现场外输作业应急反应程序规定,有以下危险状态时应急程序启动,包括但不局限于:
1)风力,浪高预警。外输期间如遇到大风,当风力达到16.9 m/s(7 级)或者有效波高超过4.1 m时停止外输作业,穿梭油轮要尽快解揽离泊,必要时根据总监指令实施应急解脱。
2)系泊大缆拉力预警。外输期间系泊大缆拉力低于20 t 时,调整拖力并密切注意穿梭油轮与FPSO的相对位置变化情况。当大缆拉力高于80 t 时,做好停止外输及穿梭油轮离泊的准备。当拉力达到100 t 时报告给系泊船长,穿梭油轮准备拆除外输软管;在30 min 内拉力2 次超过120 t 时,应停止提油作业,解掉大缆,穿梭油轮离开FPSO 所在油田区域。
3)船体运动状态。当系泊大缆与FPSO 的艏艉线夹角达到30°时,及时调整穿梭油轮的方向,做好停止外输的准备。当系泊大缆与FPSO 的艏艉线夹角接近45°时立即停止外输,穿梭油轮做好拆除外输软管的准备。当夹角超过45°并有继续增大的趋势时,相关人员按照外输紧急部署就位,视现场情况决定穿梭油轮是否离泊。
2.4 移动端设计
移动端选择中柏29.46 cm(Jumper,11.6 英寸)win10 EZpad Go 4G+128G 平板电脑,可在手持终端上实时查看各传感器测量数据并对光电测量设备进行控制。手持终端机接收无线传输基站发送的信息,在软件界面上体现类似于FPSO 智能管理平台服务器的软件系统的监测、预测及预警3 大功能,各手持终端机之间、手持终端机和服务器之间可实现信息交流,手持终端机具备自赋值和远程访问FPSO 智能管理平台服务器的功能。
3 系统硬件实现
3.1 硬件架构设计
光电测量系统在船载电源箱的供电下进行工作,获取图像信息以及激光测距信息,并进行目标跟踪,将图像信息和转台角度信息和距离信息通过光端机转换为光信号,经船上通信网络发送至船上显控计算机,由安装在显控计算机中的光电综合处理软件进行图像数据的接收,并在显控计算机中进行显示、处理,计算偏离角和船距信息,判断是否超出预定范围,将报警信息发送给报警系统。
光电测量仪主机组成包括:可见光高清摄像机、激光照明器、激光测距机、红外热像仪、光谱检测仪5 个有效光学载荷,以及海用光电转台、视频跟踪器等平台部件,如图5所示。
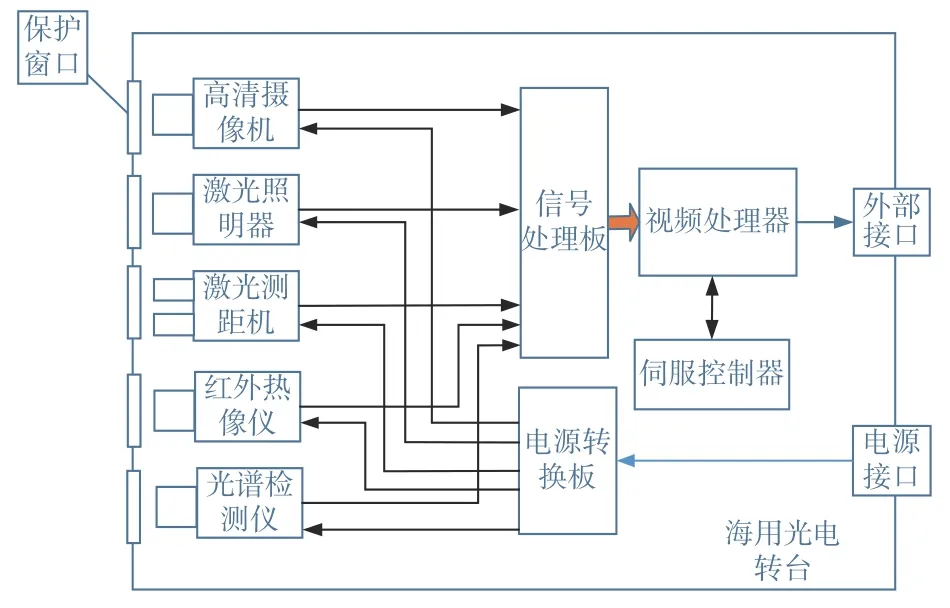
图5 光电测量仪主机组成框图Fig.5 Composition block diagram of photoelectric measuring instrument host
图5 中,海用光电转台内部由转台结构体、电源转换板、信号处理板、伺服控制器等组成。电源转换板将24 V 电源电压转换为内部各模块所需要的电压,信号处理板转发内部各控制信号和视频信号,伺服控制器实现控制算法驱动转台运动,转台结构体实现结构支撑和环境防护。船载电源通信箱包含防护箱体、ACDC 转换电源模块、视频光端机、光纤盒等。ACDC 转换电源模块实现从220 V交流电到24 V 直流电的转换,为光电测量主机提供电源,视频光端机将光电测量主机输出的电信号转换为光信号进行传输。显控计算机安装于FPSO 控制中心,内部包含光电综合处理软件,实现人机交互以及数据接收、显示和处理。
3.2 光学器件设计
要求系统具有实时监测功能,因此选择可见光相机进行实时视频监测,为了增强夜晚光线,选择激光照明器在特定情况下对可见光相机进行辅助实时视频监测,同时添加红外热像仪作为补充视频监测。为了实现对FPSO 与穿梭油轮之间的距离进行精准测量,选择激光测距机进行激光测距。
在FPSO 原油外输作业中,FPSO 与提油轮的距离大约在70 m~100 m 左右,光电转台安装在FPSO船艉,高清摄像机监测提油轮船艏某个目标。
要求系统具有广角大视场,至少能覆盖整个提油轮。最大提油轮总长245 m,则提油轮两端对相机的夹角为
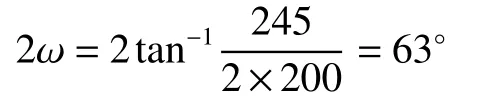
若采用3.45μm 像元的探测器,则1 920×1 080 pixel 的靶面大小为6.624 mm×3.726 mm,对角线长度为7.6 mm。该视场下焦距为
指标要求中,假设观测目标大小为0.4 m×0.4 m,在200 m 外实现目标探测(探测像素按8×8 pixel 计算),则满足探测要求的光学系统焦距为

因此,采用焦距为6.2 mm~13.8 mm 的光学系统即可满足设计指标要求。
在红外相机选择方面,由于常见1 280×1 024 pixel 非制冷焦平面阵列探测器的像元尺寸通常为12μm,靶面大小为15.4 mm×12.3 mm,对角线长度为2y′=20 mm。为了与高清可见光相机的视场范围匹配,故相机广角视场角应达到2ω=60°,半视场角ω=30°,相机焦距为

长焦焦距应满足对目标的探测需要,假设观测目标大小为0.4 m×0.4 m,在200 m 外实现目标探测(探测像素按8×8 pixel 计算),则满足探测要求的光学系统焦距为
因此,采用焦距为18 mm~48 mm 的红外光学系统即可实现指标要求。
选择激光测距机及激光照明器时,首先选择对人眼安全的设备,避免提油轮上的工作人员直视而发生眼部伤害。由于本系统的预测准确度与测距值有直接关系,故选择测距机时优先考虑短距离、精度高的设备。
此外,系统还要求可以在外输作业时对外输软管状态进行监测,一旦发生因外输软管破裂导致原油泄漏的情况,通过系统的实时监测可及时发现溢油,并根据光谱检测图像对溢油的危险状态进行定级。白天使用可见光谱段进行光谱检测,夜间则使用激光照明器作为主动光源,选择近红外谱段进行光谱实时监测[9]。
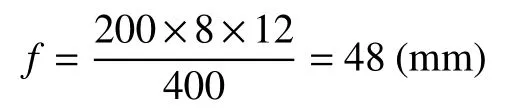
本系统通过模拟海上外输的不同环境及被监测物质的不同属性来实现光谱仪对被监测物质光谱频段的学习,最终实现在150 m 范围内对溢油及时探测并锁定溢油位置、油液扩散范围和运动轨迹的图像。如图6 和图7所示,高光谱相机获取水体某一区域信号,通过区域信号来判断水体目标的光谱信息,如水质中含有某些特定成分(溢油),则区域内对应的信号从光谱角度进行分析,可知与正常水体的特征光谱是存在差异的,然后通过机器学习的方法,对光谱曲线进行训练学习,得到相应的数据模型,进而为后续的油污检测提供分析依据。
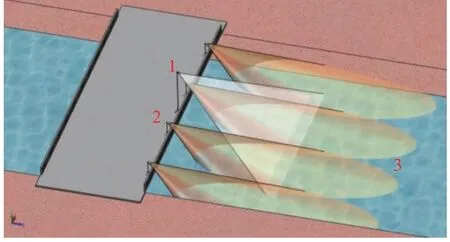
图6 光谱数据采集示意图Fig.6 Schematic diagram of spectral data acquisition
图7 光谱曲线图Fig.7 Spectral curves
通过图7 可明显看出,在450 nm~650 nm 波段内油渍与水的光谱图像有明显差别,油渍反射的光强度远高于水,因此可通过建立相应的数学模型实现对油渍的识别定位。
3.3 无线传输系统设计
系统建立无线传输基站进行数据信号传输,无线基站主机安装在FPSO 中控室,FPSO 无线基站室内天线通过WiFi 模式与显控终端进行数据信号交换。FPSO 无线基站室外天线安装于FPSO 船艉至高点,通过手持单兵基站与无线基站建立链接,平板电脑与手持单兵基站建立链接,将数据信号传送到穿梭油轮和拖轮上的平板电脑上。无线基站的建立模式如图8所示。
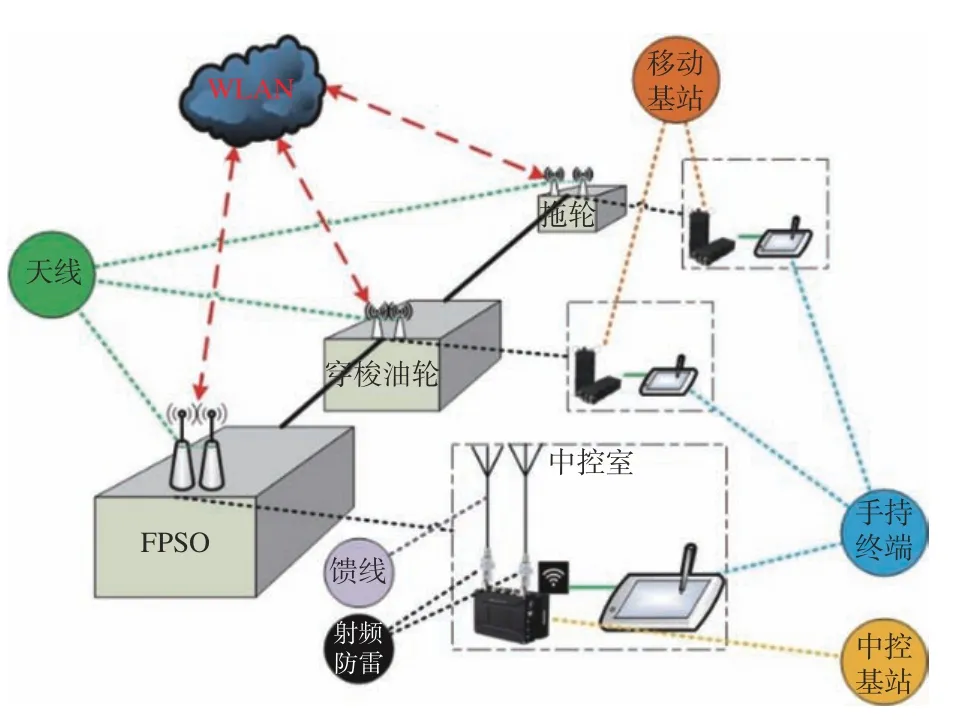
图8 无线基站示意图Fig.8 Schematic diagram of wireless base station
4 系统实现
4.1 系统集成
根据各集成设备的接口要求,需要集成的器件有5 类传感器,接口主要有RS-232 及RJ-45。为使两种接口类型的数据均由RJ-45 输出,采用串口服务器USR-N668 来转换数据,实现串口与网口数据的收集交互。传感器的集成布局如图9所示。
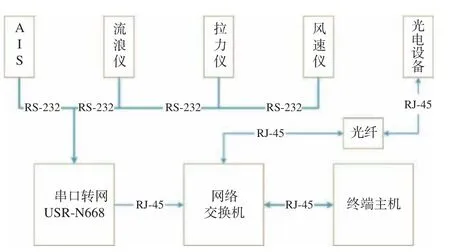
图9 传感器集成布局图Fig.9 Layout of sensor integration
图9 中,USR-N668 输入端与RS-232 接口传感器相连,输出端连接至网络交换机;光电测量设备的数据由光纤输出端转换成网络数据,将数据通过RJ-45 打包发送到网络交换机;网络交换机的输出端再与软件终端机器相连,实现软件对传感器数据的读取和对光电测量设备的控制。通过无线局域网的搭建,软件终端所显示视频数据及图表数据可发送到穿梭油轮和拖轮上,使手持终端实现数据共享。
4.2 系统应用测试
该系统应用于南海某FPSO 外输作业过程中,系统对数据进行实时采集,并将所采集到的数据通过光缆或无线传输模块传输到上位机平台,由上位机按照时间顺序进行分类存储,并以直观的方式将数据在显示窗口进行更新显示,如图10所示。
图10 软件系统主界面Fig.10 Main interface of software system
针对监测数据延时进行以下测试:在复合光电转台前方放置秒表计时器,系统实时显示可见光图像,此时对秒表计时器与显示的可见光图像同时拍照,比较秒表计时器实际计时值T1与显示的可见光图像上秒表计时器值T2,并计算T1和T2差值。按以上方法连续测3 次取平均值,可得出监测数据延时。
针对测距误差与夹角误差进行以下测试:在复合光电转台前方放置目标物,启动转台跟踪功能,记录此时转台的方位角值γ1,测距机测距值AC1,并用测量工具测量出目标物与转台的实际距离AC2,沿目标物与转台连线的垂直方向水平移动目标物后,记录转台方位角值γ2,并且用测量工具测量出目标物的移动距离AC3,计算AC1与AC2差值L。按以上方法连续测3 次取平均值,可得出转台测距精度ΔL。
通过(2)式可计算出γ与 θ,并计算其相差值。按以上方法连续测3 次取平均值,可得出转台跟踪精度 Δγ。

如图11所示,B点为FPSO 系泊大缆仪,C点为提油轮系泊大缆仪,A点为复合光电转台,CD为两船相对距离,CD⊥AB,FPSO 与提油轮相对夹角为α。设转台零位垂直于FPSO 船艉,转台跟踪角为γ,β=90°-γ,AC为转台测距机测量值,AB≈5 m。
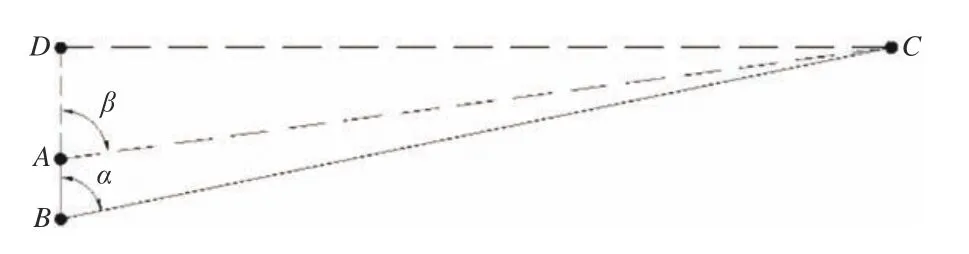
图11 测角精度误差分析Fig.11 Diagram of error analysis of angle measurement accuracy
根据以下公式计算相对夹角:

FPSO 与提油轮相对夹角α的监测误差与转台角γ的精度以及转台测距机测量值AC的精度相关。
设AC=70 m,γ=5°,则:
通过(4)式计算可得FPSO 与提油轮相对夹角监测误差,若该值小于1°,则满足系统要求。
测试结果表明:系统监测数据延迟≤0.5 s,FPSO 与穿梭油轮相对距离测量误差≤0.4 m,FPSO与穿梭油轮相对夹角测量误差≤0.2°,120 s 内夹角预测精度≥80%。
在外输作业过程中,主界面的预警模块会根据预警值设置不同的预警颜色和信息。在系泊缆拉力超过120 t 时,预警达到一级,预警灯变为红色,同时显示出预警信息。
此外,在数据显示界面,可以对FPSO 以及拖轮的船艉进行视频显示,还可对风速风向、浪高浪速、流速流向、拉力、FPSO 以及穿梭油轮和拖轮的经纬度和航向等数据进行波形图表显示。在历史数据查询界面,可以通过选择对应的日期和时间对3 个月内的历史数据进行查询。在此功能栏中,可以选择任意传感器进行监测,视频及文字信息查询。
5 结论
本文提出了一种FPSO 原油外输光电辅助决策系统的设计方案,系统集成了FPSO 原有传感器的监测信息,增加了由可见光探测、红外探测、激光测距/照明以及光谱分析技术组成的光学探测设备,在硬件集成的基础上开发了软件系统,并建立了系统专用的无线自组网络。
该系统可实现视频实时监测、数据实时预测/预警等功能,通过激光测距与机械传感器测角可测量外输作业相对距离与夹角,并对外输软管的状态进行实时光谱监测。系统解决了目前FPSO外输作业时存在实时监测数据不全面,缺少FPSO与穿梭油轮之间夹角和间距监测,以及对外输软管状态监测等问题,为外输指挥人员进行外输作业提供了可视化参考依据。
猜你喜欢
舰船科学技术(2022年20期)2022-11-28
水上消防(2021年5期)2022-01-18
语数外学习·高中版上旬(2020年8期)2020-09-10
船海工程(2020年3期)2020-07-31
新高考·高一数学(2019年1期)2019-04-15
船舶与海洋工程(2018年4期)2018-09-10
中学生数理化·高一版(2018年5期)2018-06-04
新高考·高二数学(2017年8期)2018-03-13
风流一代·经典文摘(2017年8期)2018-01-15
科技经济市场(2017年2期)2017-05-22