变体制导炮弹气动特性分析及弹道仿真
2023-01-11 02:40王旭刚李广才
弹道学报 2022年4期
贾 昂,王旭刚,李广才
(1.南京理工大学 能源与动力工程学院,江苏 南京 210094;2.淮海工业集团有限公司,山西 长治 046000)
变体飞行器在飞行过程中能够改变局部或整体外形,实时适应多种任务需求,在多种飞行环境下保持最优的飞行效率和气动性能[1]。
将变体技术应用于飞机或无人机设计中,国内外已经开展了很多的研究[2-6]。对于巡航导弹,目前已经对变后(前)掠巡航导弹、变展长巡航导弹、组合变形翼巡航导弹、倾斜翼巡航导弹等开展了研究[7-13]。文献[14]对变体技术在助推-滑翔飞行器(高超声速飞行器的典型代表)上的应用前景进行分析。
大口径制导炮弹具有威力大、打击精度高、性价比高等优势,通过引入变体飞行技术可大幅度提高其射程,进而提升大口径火炮在未来战争中的远程精确打击和超远程火力压制的能力,具有重要的研究意义。
文献[15,16]分别针对亚音速条件和超音速条件设计了变后掠翼导弹气动外形,总结了弹翼后掠角变化与气动参数之间的关系。王旭刚等[17]为不同飞行阶段的变后掠翼巡航导弹设计了弹道和控制指令,仿真结果表明所设计的弹道及指令合理,并且制导精度高。针对变后掠翼航弹的弹道优化问题,赵日等[18]采用粒子群算法对不同投放条件下的滑翔弹道进行优化设计,结果表明超音速投放相比亚音速投放增程效果明显。为提高变后掠翼导弹的末速,文献[19]基于hp-自适应伪谱法对其末端弹道进行优化,采用后掠角和攻角双变量控制方案,建立多约束条件下的弹道优化模型,提出求解策略,结果表明导弹能够在保证命中精度的同时落速更大,落角更佳。
本文为增加制导炮弹的射程,将变体飞行技术应用于滑翔增程制导炮弹的设计中,结合可变形弹翼,设计了一种变体制导炮弹。首先经过迭代优化设计变体制导炮弹的气动外形,描述变体制导炮弹的控制方式和弹道特点;随后利用工程化算法计算炮弹在不同弹翼外形时的气动参数,同时对气动特性及操纵特性随后掠角的变化规律进行分析;最后为充分发挥变体制导炮弹的性能,基于气动特性分析的结果制定炮弹飞行过程中的变体策略,并采用hp-自适应伪谱法对变体制导炮弹和固定外形制导炮弹的滑翔段弹道以射程最远为目标进行优化和对比。
1 变体制导炮弹设计
1.1 变体制导炮弹气动外形设计
为提高控制效率,减小舵面铰链力矩,限制制导炮弹跨声速飞行时的静稳定性,本文设计的变体制导炮弹采用鸭式布局。变体制导炮弹的主要目标是为了增大射程,因此满足稳定性和操纵性要求的前提下,以射程为目标迭代优化设计变体制导炮弹的气动外形,设计流程图如下。
变体制导炮弹长度为2 m。为使炮弹头部器件布置合理并减小波阻,头部采用卡门形母线,长径比为2.6;为减小弹身中段空气阻力,同时保证足够的空间来容纳各种弹载设备以及变形机构、火箭助推发动机等,弹身中段选择常规的圆柱形,长径比达到10.3。对于带有火箭发动机的增程炮弹,一般采用较小船尾角船尾或者无船尾的尾部设计,故尾部采用圆柱式无船尾角的设计。
为了保证气动特性、操控性和结构强度,变体制导炮弹选用根梢比大的梯形舵面;为了满足变体制导炮弹在升弧段増加弹丸的稳定性同时对弹丸进行减旋的需要,尾翼翼展应尽量小。
弹体中部有“一”字型排列的可变形弹翼,与常规固定外形弹翼不同,变形弹翼采用机械结构搭配柔性蒙皮,弹翼形状随飞行环境和飞行任务改变(弹翼后掠角改变的同时会改变翼展和翼面积)进而获得最优的飞行性能。
在其他几何参数固定时,弹翼根梢比对空气动力特性影响较小,三角翼(根梢比无穷大)的升阻比比梯形翼大,故采用三角形弹翼。三角形弹翼过小的后掠角对应大的翼展,提供较大的升阻比,但同时导致制导炮弹的操纵性较差。而过大的后掠角对提高升力效果不明显,经过迭代优化设计,弹翼后掠角变化范围在30~60°,最终确定的变体制导炮弹外形如图2所示。

图1 变体制导炮弹气动外形设计流程图Fig.1 Flow chart of aerodynamic shape design of morphing guided projectile
图2 变体制导炮弹外形图Fig.2 Shape diagram of morphing guided projectile
1.2 变体制导炮弹控制方式
变体制导炮弹采用鸭式布局,头部两对“十”字形布置的鸭舵分别对俯仰和偏航方向进行控制。由于鸭舵会对弹翼和尾翼产生下洗影响,因此结合鸭舵控制滚转效率不高和变体制导炮弹弹翼外形可变的特点,提出一种通过弹翼的非对称变形来提供滚转控制力矩的方法:当一侧弹翼后掠角增大导致弹翼面积减小时,该弹翼受到的升力减小,另一侧弹翼外形保持不变则其受到的升力基本不变,两侧弹翼上的升力差将产生滚转力矩,控制炮弹滚转方向稳定。
1.3 变体制导炮弹弹道特点
变体制导炮弹采用火箭助推与滑翔增程相结合的复合增程方式。炮弹发射出炮口后折叠尾翼张开(如图2(a)所示)保持稳定飞行,随后火箭发动机点火,推动弹丸(爬高)增程。火箭发动机工作结束后炮弹继续爬升飞行,期间弹道参数探测系统开始工作,到弹道顶点前后弹上鸭舵及变形翼面打开(如图2(b)所示)。随后变体制导炮弹根据操控指令控制舵面偏转和弹翼变形,操纵弹体姿态使其滑翔至弹道终点。
与常规的制导炮弹不同,由于可变形弹翼大幅提高了炮弹的升阻比,并且在滑翔阶段采用了变体飞行技术保持气动特性较优,使得变体制导炮弹的射程得到显著提升。
2 变体制导炮弹气动特性分析
本文利用现有的工程化算法,基于模块化思想,以大量实际试验数据为基础,结合部件组合法对炮弹气动力进行快速估算,与一般工程估算方法和经验公式的计算结果相比,具有适应性强和精度高的优点。
假设任一瞬时弹翼受力仅与飞行姿态及外形有关,与气动力变化过程无关,对其气动特性进行分析。
2.1 升阻特性分析
分别计算炮弹弹翼后掠角在30°、40°、50°、60°时不同马赫数及攻角对应的升力系数和阻力系数。
变体制导炮弹升力系数随马赫数和攻角变化如图3所示。分析可知,变体制导炮弹的升力系数与攻角呈线性关系,随攻角增大而增大;不同后掠角外形升力系数随马赫数变化的趋势一致,随马赫数增大先增大后减小。以60°后掠角外形、6°攻角为例,马赫数由0.5增大到0.8时,升力系数由3.68增大到4.22,马赫数达到1.2时升力系数为4.31,马赫数达到1.5时升力系数又减小为3.59。
图3 不同弹翼后掠角时炮弹升力系数变化Fig.3 Variation of lift coefficient with different sweep angles
变体制导炮弹的阻力系数随马赫数和攻角变化如图4所示。分析可知,不同后掠角外形阻力系数的变化规律同升力系数相似,随攻角增大而增大,随马赫数先增大后减小。以60°后掠角外形、6°攻角为例,马赫数由0.5增大到0.8时,阻力系数由0.69增大到0.84,马赫数达到1.2时阻力系数增大到3.48,马赫数到1.5时阻力系数减小到2.55。
图4 不同弹翼后掠角时炮弹阻力系数变化Fig.4 Variation of drag coefficient with different sweep angles
如图5所示,弹翼后掠角的变化对炮弹升阻比影响较大。炮弹飞行马赫数在1.1以上时,60°后掠角外形的升阻比最大,最高可以达到1.73;随着飞行速度的减小,50°后掠角外形更具优势,在马赫数为0.8和0.9时其升阻比分别达到5.63和2.94,相比60°后掠角外形高出6.9%~12.5%;当炮弹飞行马赫数降低至0.7及以下时,30°后掠角外形的升阻比最大,最高可达8.36。因此随着飞行速度的减小弹翼后掠角应该变小,使得弹翼展长和面积增大以提高升阻比,可以以此作为变体制导炮弹飞行过程中变体方案的设计依据。
图5 不同外形最大升阻比随马赫数变化Fig.5 Varialion of maximum lift-drag ratio with Ma number
2.2 静稳定度分析
炮弹静稳定度的计算表达式如下:
(1)

对于变体制导炮弹而言,在火箭发动机工作完成后的上升段弹道,此时鸭舵和弹翼未张开,应提高静稳定度;在鸭舵和弹翼张开后的有控飞行段,即远程滑翔段弹道,应减小静稳定度,以保证良好的操纵性。
如图6所示,火箭发动机完成工作后炮弹的静稳定度保持在4%~21%之间,并随马赫数减小而增大,满足上升段稳定性要求。
图6 上升段静稳定度变化曲线Fig.6 Curve of static stability in ascending stage
变体制导炮弹不同外形静稳定度随马赫数和攻角的变化规律如图7所示,可知变体制导炮弹不同外形在不同飞行速度的静稳定度始终保持在0.1%~6.5%之间,在整个滑翔飞行过程中满足要求。
图7 变体制导炮弹不同外形时静稳定度变化Fig.7 Curve of static stability of morphing guided projectile with different shape
2.3 操纵特性分析
假设制导炮弹在飞行过程中都处于瞬时平衡状态,即
(2)
攻角α和舵偏角δ之间的关系可以由下式求得,得到制导炮弹的操纵比:
(3)

图8 舵偏角5°时不同外形操纵比随马赫数变化Fig.8 Variation of steering ratio with Mach number fordifferent shapes when the canard deflection angle is 5°
3 变体制导炮弹弹道规划及仿真
3.1 变体制导炮弹变体方案
为了优化变体制导炮弹在飞行过程中的气动性能,需要制定合适的变体策略以充分发挥变体制导炮弹的优势。根据前文后掠角对炮弹升阻比影响的分析可知,在刚开始滑翔飞行时,制导炮弹速度较高,此时采用60°后掠角外形升阻比最大;随着炮弹飞行马赫数减小至1.1后,弹翼后掠角应该减小至50°以获得更大的升阻比;在炮弹飞行马赫速降低至0.7以下时,采用30°后掠角外形飞行,这样可以保证炮弹在整个滑翔飞行过程中升阻比较大。基于此方案对变体制导炮弹的滑翔段弹道进行优化设计。
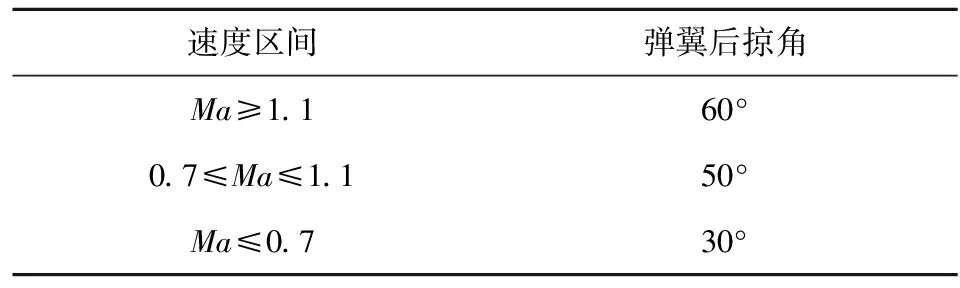
表1 变体制导炮弹变体方案Table 1 Morphing scheme of morphing guided projectile
3.2 变体制导炮弹弹道优化模型
为准确描述变体制导炮弹滑翔时的位置和姿态信息,对其受力情况进行简化:①仅考虑炮弹在纵向平面内的运动;②并且忽略弹翼后掠角变化引起的炮弹质心位置的改变;③将变体制导炮弹看成一个可操控的质点。在此基础上,建立其在滑翔段的质心运动方程组:
(4)
式中:x为射程,y为射高;v为炮弹的速度;θ为弹道倾角;S为参考面积;ρ为空气密度;α为攻角;δ为舵偏角;CD和CL分别为全弹的阻力系数和升力系数。
优化问题的本质是在满足动态约束、路径约束、边界约束的前提下寻求最优控制方式u(t),使得性能指标J在从一个状态转移到另一个状态时最小(或最大)的非线性最优控制问题(Optimal Control Problems,OCP),可用Bolza模型描述:
(5)
式中:x(t)∈Rn为n维状态向量;u(t)∈Rr为r维控制向量;J∈R是性能指标;Φ为Mayer型代价函数;g为Lagrange型代价函数;φ为边界约束;c为状态转移过程中参数约束。根据变制导炮弹弹道优化问题对模型中的参数和约束进行具体定义。
由弹道方程可知,炮弹在飞行过程中的状态主要由速度、弹道倾角、射程、射高和攻角决定,选取这些变量作为状态变量。对各种状态变量的约束称为状态约束,在滑翔弹道起点和终点处的约束称为端点约束。
对速度和弹道倾角在落点处加以约束以确保对目标的毁伤效果:
(6)
在炮弹飞行过程中为保证弹道的平滑和良好的飞行性能,控制变量也受到限制,即:
δ≤|δmax|
(7)
本文设计的变体制导炮弹主要目标是增程,故弹道优化的目的是使其射程最大化,即射程负值极小的问题:
minJ=-x(tf)
(8)
3.3 最优控制问题转换
(9)

设Li(τ)=(i=1,2,…,N(k))为N(k)阶Lagrange插值多项式,即
(10)
对状态变量和控制变量的近似可以采用上式,这样连续最优控制问题就被离散转换为多区间NLP问题。
转化后的NLP问题可以由非线性规划算法求解,可以增加近似多项式的维数或者增加子区间数,来更新NLP问题,在降低计算量的同时最大限度保证精度要求。
选取状态轨迹的曲率作为提高求解精度方式的判别准则,当某区间的误差过大时,若各采样点的曲率都符合标准,该区间内状态轨迹平滑,曲率具有一致性,采取增加区间内插值多项式的维数来提高求解精度;否则认为该区间内曲率具有非一致形式,区间状态轨迹相对来说是非平滑的,此时为提高求解精度需进一步细化区间。
(11)
式中:N(+)为新增加的配点数。
为了细化区间,需要计算得到曲率与曲率平均值的比值,增加子区间的网点位置就是比值最大时对应的采样点;在每个新增加的区间内,每次新增配点数为N(0)(大小由实际情况决定)。
3.4 变体制导炮弹弹道仿真
基于hp-自适应伪谱法分别对变体制导炮弹以及固定外形制导炮弹以射程最大为目标进行优化,仿真的初始条件如下:v0=800 m/s,θ0=55°,m=100 kg,参考面积S=0.018 87 m2,在出炮口后的5~30 s内火箭发动机工作,推力为2 400 N/s。
飞行过程中弹道、速度、攻角、弹道倾角、舵偏角等的变化规律如图9~图14所示。

图9 弹道曲线Fig.9 Curve of trajectory
如图9所示,无论是变体制导炮弹还是固定外形制导炮弹,弹道轨迹都比较平滑。固定外形制导炮弹最终射程达到155.5~173 km,变体制导炮弹弹翼外形根据变体方案随飞行速度变化,在飞行过程中保持气动特性较优,获得了更大的升阻比,使其滑翔能力更强,最终射程可以达到190.5 km,相比固定外形制导炮弹提高了10.1%~22.5%。
如图10所示,小后掠角弹翼外形对应更大的展弦比和翼面积,在超音速阶段所受阻力也更大,因此后掠角越小,速度衰减越快,而变体制导炮弹在超音速时采用大后掠角外形速度衰减较慢,保留了较大的存速,在亚音速滑翔飞行段更有优势。同时由于对终点速度的限制,不同外形最终的速度均为160 m/s。
图10 速度变化曲线Fig.10 Curve of velocity
如图11所示,由于变体制导炮弹操纵比随后掠角的增大而增大,所以在操纵机构执行能力有限,即鸭舵最大舵偏角受到限制时,同样的舵偏角大后掠角外形对应的平衡攻角更大,小后掠角外形则较小。从图中可以看出,跨音速飞行段大后掠角外形出现了攻角过大的情况,变体制导炮弹在跨音速段通过改变弹翼外形可以避免攻角过大,同时在亚音速滑翔时攻角也保持较小范围内。
图11 攻角变化曲线Fig.11 Curve of attack angle
如图12所示,变体制导炮弹的弹道倾角相比固定外形制导炮弹变化幅度更小,整体变化更加平缓。
图12 弹道倾角变化曲线Fig.12 Curve of trajectory inclination
如图13所示,变体制导炮弹为了获得更大的升阻比提高滑翔能力,在不同弹翼外形时都需要保持较大的舵偏角来获得更大的平衡攻角,在整个飞行过程中舵偏角与其他固定外形制导炮弹相比较大。
图13 舵偏角变化曲线Fig.13 Curve of canard deflection angle
图14 弹翼后掠角变化曲线Fig.14 Curve of sweep angle
4 结论
本文设计了鸭式布局变体制导炮弹的气动外形及控制方式;计算其气动数据并且对气动特性及操纵性进行分析;基于气动特性分析的结果规划了滑翔段飞行时的变体方案,采用hp-自适应伪谱法以射程最远为目标对变体制导炮弹和固定外形制导炮弹的滑翔段弹道进行优化,仿真结果表明:
①所设计的变体制导炮弹具有良好的气动特性和操纵特性。
②后掠角变化能够改善变体制导炮弹在滑翔段的气动特性,通过改变弹翼外形可以使变体制导炮弹在滑翔飞行过程中保持较优的气动特性。
③与固定外形制导炮弹相比,变体制导炮弹射程更远,增幅可达10.1%~22.5%,最远达到190.5 km。
④变体制导炮弹在超音速飞行过程中速度衰减更慢,滑翔飞行时攻角和弹道倾角波动更小,结果可为变体制导炮弹以后的研究提供参考。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
数学物理学报(2021年5期)2021-11-19
军民两用技术与产品(2021年7期)2021-10-13
北京航空航天大学学报(2020年3期)2021-01-14
科学技术与工程(2020年30期)2020-12-04
小型微型计算机系统(2018年6期)2018-07-04
计算机系统应用(2017年10期)2017-10-20
北京航空航天大学学报(2017年10期)2017-04-20
百科探秘·航空航天(2015年10期)2015-11-07
实验流体力学(2013年2期)2013-09-21