三维激光扫描仪在实景三维模型数学精度检验中的研究
2023-09-16 16:53赵鹏,陈吴敏,罗浩,张璇
国土资源导刊 2023年3期
赵鹏,陈吴敏,罗浩,张璇




摘 要:本文以某测區实景三维模型成果为例,结合RIEGL VZ-2000i 长距离三维激光扫描仪采集测区地面点坐标检测数据,并对数据进行处理。将三维激光扫描仪检测数据与传统方式获得的检测数据结果结合内业进行对比分析,研究三维激光扫描技术在数学精度检验中的可行性。研究表明三维激光扫描仪可为实景三维测绘成果的质量评价提供检验数据,是倾斜摄影建模技术的有效检测途径之一。
关键词:三维激光扫描仪;倾斜摄影实景三维模型;精度检验
中图分类号:TP391 文献标志码:A 文章编号:1672-5603(2023)03-116-05
Research on the Mathematical Accuracy Testing of Real 3D Models Based on 3D Laser Scanners
Zhao Peng,Chen Wuming,Luo Hao,Zhang Xuan
(Hunan Province Surveying and Mapping Product Quality Supervision and Inspection
Authorization Station,Changsha Hunan 434000)
Abstract: This article takes the actual 3D model results of a certain survey area as an example, and combines the RIEGL VZ-2000i long-distance 3D laser scanner to collect ground point coordinate detection data of the survey area, and processes the data. Compare and analyze the results of 3D laser scanner detection data with those obtained through traditional methods, and study the feasibility of using 3D laser scanning technology in mathematical accuracy testing. Research has shown that 3D laser scanners can provide inspection data for the quality evaluation of real-world 3D surveying results, and are one of the effective detection methods for oblique photography modeling technology.
Keywords: 3D laser scanner; 3D model of oblique photography reality; Accuracy inspection
0 引言
实景三维中国建设是落实数字中国、平安中国、数字经济战略的重要举措,是落实国家新型基础设施建设的具体部署,是服务生态文明建设和经济社会发展的基础支撑[1]。随着国家“十四五”基础测绘规划编制工作的启动、“数字城市”和“实景三维中国建设”的推动,以及尚未正式出台用于实景三维模型数据质检的规范和标准,研究一种检验实景三维模型数学精度的方法势在必行,为今后“国家标准化发展纲要”的实施和实景三维模型产品的检验提供意见建议。
目前,由于倾斜摄影实景三维模型在生产工艺、成果表现、应用层次等方面均与传统三维建模不同[2],原国家测绘地理信息局颁布的行业标准《三维地理信息模型数据产品质量检查与验收》(CH/T 9024-2014)不能满足对实景三维模型产品的质量检查与评定。现阶段,测量仪器随着科学技术的进步也在不断的更新换代[3],地面三维激光扫描技术日渐成熟,国内很多研究院和大专院校正在加快三维激光扫描技术与理论的研究,并取得了一定成果[4],推动三维激光扫描技术在工业测量、变形监测、三维建模等多领域广泛应用。我们通过在测区实际采用地面三维激光扫描仪获取检测数据,与传统方式获取的检测数据进行比较,对实验数据进行分析研究,对其在质量检验中的可行性进行探索。
1 三维激光扫描系统简介
本文用RIEGL VZ-2000i超高速、长距离三维激光扫描仪作为测量工具,该仪器采用全新的处理器,以未来导向性为基准,结合创新处理体系结构、互联网连接以及最新全波形处理技术,即使在气象条件恶劣的情况下也能进行快速、高精度、长距离的测量。
1.1 工作原理
三维激光扫描仪在测量时不需要过多的人工干预,工作时两个同步反射镜快速而有序地旋转,将激光脉冲发射体发出的窄束激光脉冲依次扫过被测区域,通过测量每个激光脉冲从发射出到经被测物体表面反射回仪器所经历的时间间隔,计算出被测点与设备间的距离。扫描控制系统同时控制和测量每个脉冲激光的角度,进而计算出被测物体上每个激光点的三维坐标[5]。
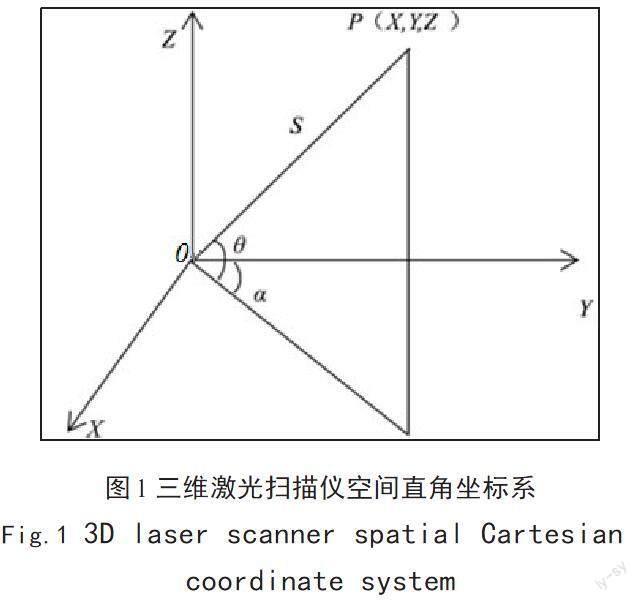
三维激光扫描仪的测量原点在仪器中心0,Y轴为仪器固定方向,Z轴为竖直向上,X轴由右手规则确定,由此建立扫描坐标系。定义仪器中心至测量目标点的距离为S;自 X 轴逆时针旋转至扫描方向在XY 平面内的投影线的角度为水平扫描角α; 扫描方向旋转至其水平投影线的角度为垂直扫描角θ,仰角为正,俯角为负; 由此可得极坐标为( S,α,θ) 并进一步建立右手空间直角坐标系[6-7],如图1 所示。
三个观测量满足下式:
X= S×cosθ×cosα
Y= S×cosθ×sinα
Z= S×sinθ
其中,S为扫描仪中心到目标物体的斜距,θ为垂直角,α为水平角。
1.2 系统性能与技术参数
RIEGL VZ-2000i三维激光扫描仪的硬件系统主要由激光扫描仪、系统软件、存储设备、电源以及附属设备等几大部分组成。激光扫描仪本身主要包括激光测距系统和激光扫描系统,同时集成了CCD数码相机和仪器内部控制与校正系统等。RIEGL VZ-2000i三维激光扫描系统主要部件参数如表1所示。
2 应用实例
2.1 测区概况
项目测区位于北纬28°00′~28°10′,东经112°50′~113°00′,提取部分实景三维模型成果进行研究,模型未精修处理。测区主要处于市区,植被极少,绝大部分为高层建筑。测区属亚热带季风性湿润气候区,海拔100 m左右,年平均温度为17.2 ℃。
2.2 方案设计
根据此次项目测区的地理位置及控制点的布设,尽量选取在视野开阔、遮挡物较少、有控制点的区域开展检测作业。首先用三维激光扫描
仪摆站扫描(至少在邻近的控制点上摆三站扫描),再用全站仪传统测量手段进行地物测量,最后内业数据提取进行精度对比分析。基于RIEGL VZ-2000i三维激光扫描仪进行测量的作业流程如图2 所示。
2.3 数据采集与处理
2.3.1 外业数据采集
根据测区地形特征、面积大小、扫描是否存在盲区等实际情况,总共设计了5个测量站,相邻测量站之间的重叠程度不低于30%,设置扫描参数为1.2MHZ,扫描的最大距离为600 m, 每个测量站其垂直角与水平角分别为100°与360°。同时在扫描仪工作中,扫描四周均设有屏障,以免人员或车辆穿过扫描视野而对扫描结果造成影响[8]。
依据《测绘成果质量检查与验收》(GB/T 24356-2009)和《三维地理信息模型数据产品质量检查与验收》(CH/T 9024-2014)标准,分别对房屋模型的坐标和悬高进行数据采集。
2.3.2 内业数据处理
(1)点云数据配准、平差
激光点云数据是基于扫描仪自身的内部坐标系,而项目数据是基于CGCS2000坐标系,故需要在RISCAN PRO软件下进行坐标转换,实现多站点云的高精度配准。点云高精度配准分为点云坐标转换和多站平差两步[9-10]。图3为多站点平差结果,满足精度要求;图4、图5分别是原始数据和多站拼接平差、去噪、滤波后的数据。
(2)特征点提取
首先统一点云数据与实景三维模型成果坐标系统,再进行多站点平差,最后选取同名特征点位置坐标,导出检测点坐标文件,叠加到模型进行精度对比分析,如图6、图7所示。
3 精度分析
根据实地采集的特征点,对三维激光扫描仪点云数据和实景三维模型的平面和悬高精度对比分析,如表2所示。
表中,点云与实测平面位置最大误差值为0.30 m,中误差值为0.09 m;点云与模型平面位置最大误差值为0.23 m,中误差值为0.06 m;点云与实测悬高差最大误差值为0.16m,中误差值为0.07 m;点云与模型悬高差最大误差值为0.18 m,中误差值为0.08 m。经实验表明,测量精度完全符合《测绘成果质量检查与验收》(GB/T 24356-2009)和《三维地理信息模型数据产品质量检查与验收》(CH/T 9024-2014)标准。因此,三维激光扫描仪适用实景三维模型数学精度检验。
4 结语
本文根据现有的相关规范,分析研究三维激光扫描仪对实景三维模型和实测检验数学精度,可以得出以下结论:
(1)RIEGL VZ-2000i三维激光扫描仪的检测精度能满足实景三维模型数学精度规范要求。
(2)为今后“国家标准化发展纲要”的实施、“数字城市”和“实景三维城市”建设,实景三维模型产品的检验、提供意見和建议。
三维激光扫描仪具有速度快、精度高、无需接触目标等诸多特点及优势,能在一定程度上规避GPS-RTK信号干扰以及全站仪视线遮挡的问题,能在一定程度上减小野外测量的工作强度,但在内业数据处理方面还有待优化。
(3)从以上结论可以看出,三维激光扫描仪对实景三维模型数学精度检验是可行的,在国家尚未出台实景三维模型数据产品质检标准的情况下,我们要在实践中归纳与总结,提高实景三维模型数据产品的质量和检验方法,这也是今后需要研究的课题。
参考文献/References
[1] 自然资源部.实景三维中国建设技术大纲(2021)[Z](2021-08-16)[2023-04-09].
[2] 国家测绘地理信息局.中华人民共和国测绘行业标准:三维地理信息模型数据产品质量检查与验收CH/T 9024-2014[S].北京:测绘出版社,2014.
[3] 李善宏,付彪,陈元寿,等.三维激光扫描仪在地形测绘中的应用[J].中国金属通报,2020(4):187-188.
[4] 张会霞,朱文博.三维激光扫描数据处理理论及应用[M].北京:电子工业出版社,2012.
[5] 徐祖舰,王滋政,阳锋. 机载激光雷达测量技术及工程应用实践[M].湖北武汉:武汉大学出版社,2009.
[6] 刘春,张蕴灵,吴杭彬. 地面三维激光扫描仪的检校与精度评估[J].工程勘察,2009,37 (11):56-60,66.
[7] 官云兰,程效军,詹新武,等.地面三维激光扫描仪系统误差标定[J].测绘学报,2014,43(7):731-738.
[8] 陈长奎.地面三维激光扫描地形测量数据粗差剔除算法及实现模式[J].资源信息与工程,2017(2):130-131.
[9] 彭维吉,李孝雁,黄飒.基于地面三维激光扫描技术的快速地形图测绘[J].测绘通报.2013(3):70-72
[10] 徐锐,康慨,王陆军,等. RIEGL VZ-4000三维激光扫描仪在水利水电工程地形测绘中的应用[J]. 地矿测绘,2015,31(1):38-40.