
一种提高星敏感器动态性能的方法*
2009-12-12 05:29龚德铸武延鹏
空间控制技术与应用 2009年6期
龚德铸,武延鹏,卢 欣
(北京控制工程研究所,北京100190)
一种提高星敏感器动态性能的方法*
龚德铸,武延鹏,卢 欣
(北京控制工程研究所,北京100190)
动态性能作为星敏感器的重要指标之一,对其进行阐述,由此引出提高动态性能的运动补偿法.描述该方法的工作原理和实现方式,包括硬件电荷转移和软件提高信噪比(SNR)两部分,其中硬件电荷转移包括CCD的X和Y两个方向的特殊处理,软件提高信噪比用DSP实现.针对STS星敏感器完成初步设计和计算,表明该方法可以提高星敏感器的动态性能.
运动补偿法;星敏感器;动态性能
星敏感器是飞行器姿态测量的重要部件,一般为静态工作,即假设恒星和星敏感器相对静止,在积分周期内星点只对CCD靶面的固定位置感光形成电荷信号.但由于安装星敏感器的飞行器本体的旋转、移动、抖动等运动,使得星点在CCD感光区移动,形成一段轨迹图像,造成星敏感器星点提取失败或星点中心精度降低.所以动态性能作为星敏感器的关键指标之一,越来越受重视.
目前国外星敏感器动态性能约在3(°)/s左右,最高达10(°)/s.提高动态性能的方法主要有两种:一是在软件上,改进后期图像处理算法,该方法有很多种算法,主要缺点在于占用图像处理时间,影响整机数据更新率;二是在硬件上,提高CCD探测灵敏度以缩短积分时间,该方法受CCD器件限制,对CCD性能要求较高.国产星敏感器动态性能提高的研究起步较晚,在具体实施上几乎处于空白状态.以国产STS星敏感器为例,其动态性能估计为3(°)/s左右,但没有具体的动态性能提高措施,没有专门的动态性能标定.
1 动态性能定义
当飞行器运动时,星敏感器处于动态跟踪模式,此时星点在感光区形成一段轨迹.如果这段轨迹图像的信噪比(SNR)较差,信号被噪声淹没,星点无法提取,星敏感器的跟踪功能就失效.如果这段轨迹成像足够清晰,能够提取星点,星敏感器具有动态跟踪功能,但星点中心精度下降,姿态精度受到影响.此时如果星敏感器积分时间较短,形成轨迹较短,星点中心精度下降有限则可以保证姿态精度.总的来说,动态精度的高低与积分时间和探测灵敏度有关:即积分时间越长,星点轨迹越长,中心精度越差;而探测灵敏度越弱,则星点轨迹形成电荷越少,SNR越差,越容易被噪声淹没.但软件后期处理能给精度损失部分补偿.
一般动态性能需要通过后期标定测量.通常将星敏感器固定,将静态星模拟器安装于转台匀速转动模拟卫星姿态角速度,形成轨迹图像,记录CCD测量的星点中心坐标和转台转角位置即可计算动态定位精度.也可以采用动态星模拟器测试动态性能(这对模拟器性能要求较高).将动态星模拟器与星敏感器完好对接,设置动态星点在一定方向以一定角速度运动,形成轨迹图像,然后通过图像采集、质心计算来确定星敏感器动态性能[1].
分析具有动态跟踪能力的星敏感器所对应的最大角速度即能提取动态星点有效轨迹的最大角速度.该最大角速度一般被用来衡量星敏感器的动态性能,它与运动星点在单个像元上停留的时间有关,同时还与CCD探测灵敏度有关.具体来说,如果探测灵敏度一定,角速度越小,星点在单个像元上停留的时间越长,产生的电荷越多,星点的SNR越大,星敏能提取动态星点轨迹的可能越大;反之,如果探测灵敏度越高,所需星点在单个像元上停留的时间越短,对应角速度越大[2].
现以STS星敏感器为例分析动态性能.其CCD为512×512像元[3],正方形像元边长Lp为17μm,正方形有效感光区边长Li为8.7mm,视场角为10°×10°,可算出1°视场对应0.87mm的感光区,如图1所示.
在200ms积分时间下,已知探测灵敏度为7mv(星等),可以推出动态追踪3.5mv的最小积分时间T的关系式为:

假设卫星运动最大角速率为A(°)/s,从图1可

图1 动态星点示意图
知对应CCD感光区的线速度V为0.87A(mm/s).星点通过一个像元的时间和路径有:

根据公式(1)和(2)推出

2 运动补偿法
如图2所示,当飞行器运动,造成星点在CCD上移动,形成轨迹图像.

图2 星点在CCD上的移动
运动补偿法适用于图2所示的帧转移大面阵CCD,它分为两个部分:第一部分是硬件电荷转移,通过设计特殊的CCD驱动时序,在CCD成像区中,使星点成像产生的电荷按照需要在y方向移动,达到星点电荷完全重合或在x方向一致;第二部分是软件提高星点SNR,在前述电荷转移的基础上,在CCD模拟信号输出经过视频处理后,在DPU单元中通过软件上的图像处理和特殊算法提高SNR.
为了更好理解运动补偿法,将星点运动分为沿y方向的一维运动和沿x、y方向的二维运动这两部分加以说明.
2.1 星点沿y方向一维运动
如图3(a)所示,星点沿y方向一维运动,只需硬件实现电荷转移就可以满足成像要求.实际上如果已知飞行器的旋转运动方向,通过专门设计和特殊安装硬件可以保证星点在星敏感器上沿y方向移动.
电荷转移就是根据星点移动的速度,设计驱动时序,使星点产生的电荷在CCD成像区跟随星点位置同步移动,达到星点始终在固定像元或固定行上感光成像.因此电荷不再分散从而实现积累或行排列,避免星点轨迹的产生.图3(b)表示电荷转移处理后的成像结果[4].
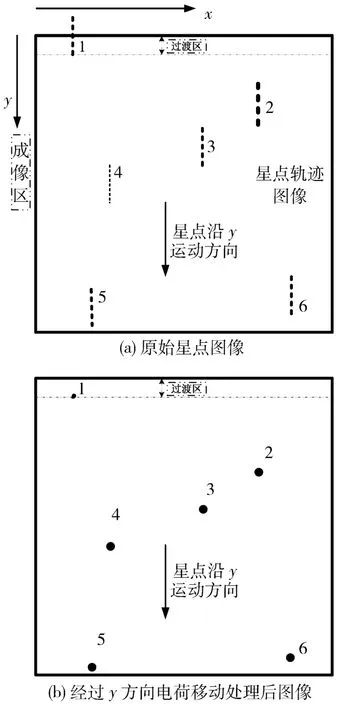
图3 星点沿y方向一维运动成像图
以STS星敏感器为例,像元边长Lp为17μm,积分时间T为200ms,假设卫星最大运动角速率A为3(°)/s,可算出对应的最大线速度V为2.61mm/s.设x为轨迹所占像元数,由xLP=TV可以算出星点在CCD上的轨迹图像延长31个像元.经过计算和时序设计,需在y方向进行30次电荷转移消除轨迹图像.需要注意的是电荷转移法存在31个像元宽度的过渡区,如图3中所示的1号星点运动轨迹,其中有部分积分轨迹处于非感光区,这对电荷积累有损失.如果探测星点能量达到1.2mv,那么过渡区中有40%的星点可以利用,总的来说感光区有用星减少约4%.即使角速率增加到12(°)/s,导航星也只损失16%,平均视场仍有30颗星左右,可满足姿态确定要求.
下面举例具体说明电荷转移的原理.假设角速率A为0.7(°)/s,线速度V=0.87A(mm/s),积分时间T积分为200ms,像元边长Lp为0.017mm,t为积分间隔时间,则

根据式(3)可推出STS每隔t=28ms需进行一次电荷转移,共进行n=6次移动.
具体时序如图4所示,每隔28ms,成像区有一次行转移,共需6次行转移.圈内为积分周期内的电荷转移操作.

图4 CCD驱动时序图
如图5所示,假设星点在积分开始时位于某一列第19行处,积分结束时位于某一列第25行处.每隔28ms,成像区时钟并行转移一次,共6次.在第一个t周期,星点位于19处并产生电荷;第二个t周期,星点位于20处并产生新电荷,同时前一个周期产生的旧电荷也被转移到20处与新电荷合并;同理,经过6次转移,星点到达25处,加上前6个周期产生的电荷共7次电荷在该处合并.
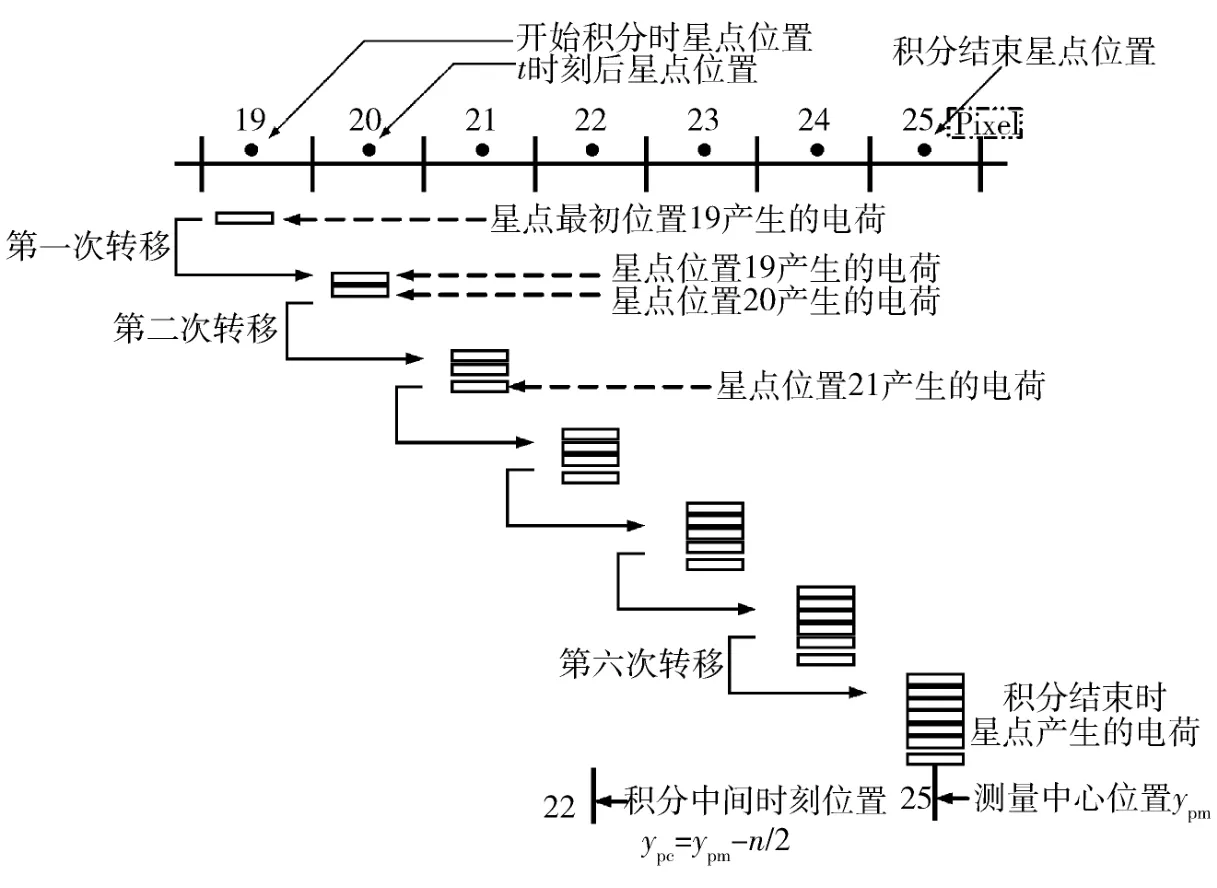
图5 电荷转移法原理说明
此时星点位置为最终位置,ypm表示测量的中心位置,ypc表示积分中间时刻星点位置,这是姿态计算的基础参数,n为转移次数,则

得ypc=25-6/2=22.
即使n次数有误,轨迹图像清除不完全,也不会引入系统错误.
2.2 星点沿x、y方向二维运动
针对星点沿y方向移动情况,采用电荷转移消除轨迹影响,提高星敏感器的动态性能.虽然可以通过设计和精确安装硬件实现星点沿y方向一维运动,但实际情况复杂,星点往往沿x,y方向二维运动,如图6(a)所示.
针对二维方向的轨迹,首先要在y方向通过电荷转移消除y方向的轨迹影响,形成如图6(b)所示的图像,此时只存在x方向的轨迹影响.但在x方向不易进行电荷转移消除轨迹现象(在某些特殊情况下也可以使用电荷转移),而是通过后期软件处理和算法实现提高SNR[5].
具体实现原理如图7所示(假设进行4次转移消除y方向轨迹).假设星点在第一个积分周期(开始积分时刻)位于n行m列,并产生电荷圈1;第二个积分周期,通过电荷并行转移法,将圈1电荷转移到n+1行m列处,同时星点也移动到n+1行m+1列处并产生电荷圈2,此时在n+1行m列和m+1列各有圈1和圈2电荷.同理,经过4次转移,星点在第五个积分周期(积分结束时刻)位于n+4行m+4列,并产生电荷圈5,同时前几个周期产生的电荷圈1到圈4也被转移到n+4行.总之,经过电荷转移,星点y方向的轨迹被消除,只剩下x方向圈1、2、3、4、5处电荷.
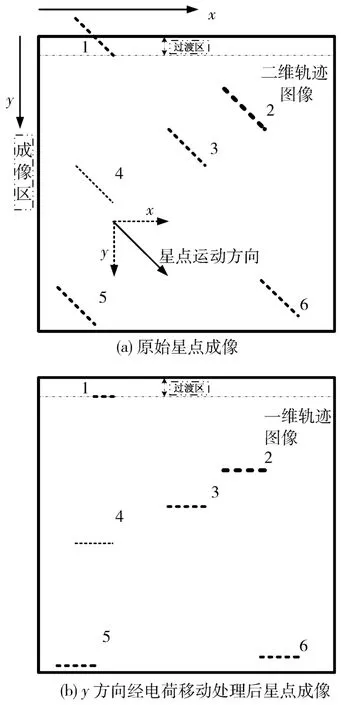
图6 星点沿x、y方向二维运动成像图
以STS星敏感器为例,一个星点静止时在积分周期内产生的总电荷用S表示,占据2×2=4个像元,用s表示像元电荷的平均值,r表示像元噪声,那
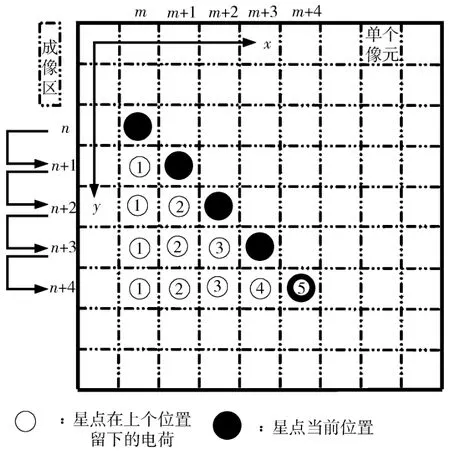
图7 电荷转移消除y方向轨迹
么静止像元的SNR为

当2×2个像元的星点移动时,将形成2n+4个像元的轨迹图像(n是电荷转移次数),则s和SNR分别为

假设当y轴角速度为1.4(°)/s时,通过计算需要电荷转移n=13次,由式(5)和(7)推出静止图像SNR与轨迹图像SNR比值为
星敏感器探测灵敏度降低所对应的星等为
log2.57.5=2.2mv
如果采用运动补偿法,在y方向进行了n次电荷转移,x方向将会形成n+1个有效电荷像元,x方向的轨迹图像整体的SNR为

根据式(6)和(8)得

所以由式(5)和(9)推出,静止图像SNR与运动补偿法后SNR比值为

将n=13代入公式(10),得到
即探测星等降低0.75mv.
同理,当y轴角速度为3(°)/s时,静止图像SNR与运动补偿SNR比值为2.9,对应探测星等降低1.16mv.如果没有运动补偿,静止图像SNR与轨迹图像SNR比值为16.5,对应的探测星等降低3.1mv.
3 结 论
提高星敏感器动态性能的最基本方法是缩短积分时间和提高探测灵敏度,但这两者主要由CCD的性能决定,不容易改进.运动补偿法是一种不需要外围设备支持,且在原有基础上通过改变CCD内部时序设计和数据处理软件算法而提高敏感器动态性能的方法.通过将运动补偿法引入STS星敏感器的设计和分析,可以知道运动补偿法基本上能消除y方向的轨迹显现,并能较大幅度提高星像的SNR.在实际设计中,可以进行多档电荷转移设计(以最大概率转移次数为基础),实现星敏感器对不同角速度的自动判断和电荷转移次数调整,以适应要求大范围运动角速度的卫星姿态测量.但对于积分时间过长,星点运动轨迹不规则的情况,运动补偿法设计较为困难.
目前运动补偿法正在开展实质模拟试验,将星敏安装于转台根据预设的角速度和运动方向转动,确认CCD时序和软件算法的正确性,验证运动补偿法的实际性能和精度.
[1] 屠善澄.卫星姿态动力学与控制(3)[M].中国宇航出版社,2003
[2] 王庆有.CCD应用技术[M].天津大学出版社,1993
[3] Frame Transfer CCD Image Sensor[Z].TH7890M Atmel_Corporation_2002,Rev._2200A-IMAGE-03/02
[4] Van Bezooijen R W H.Performance of the Ast-201 star tracker for the microwave anisotropy probe[C].AIAA Guidance,Navigation,and Control Conference,Monterey,California,2002,AIAA-2002-4582
[5] Van Bezooijen R W H.SIRTF autonomous star tracker[J].Proceedings of SPIE,2003,(4850):108-121,SPIE.0277-786X/03
An Attemptat Improving Dynamic Perform ance of Star Tracker by Motion Compensation
GONG Dezhu,WU Yanpeng,LU Xin
(Beijing Institute of Control Engineering,Beijing 100190,China)
Amotion compensation(MC)method is introduced to improve dynamic capability of star tracker.Then the MC principleis explained in detail,including charge-transfer in hardware and SNR-improving in software,with the emphasis on implementation means and conditions.The charge-transfer in hardware include special disposal in X and Y directions of charge couple device(CCD),and SNR-improving in software is realized in digital signal processing(DSP).Finally,in order to improve the dynamic capability,primary design and calculation based on STS star tracker made in China are presented.The results show the MC takes effect on dynamic capability improvement of star sensors.
motion compensation;star sensor;dynamic capability
*国家863高技术资助项目(8000100040004333).
2008-11-02
龚德铸(1977—),男,贵州人,高工,研究方向为成像式敏感器(e-mail:gongdezhu@sina.com).

TN379
A
1674-1579(2009)06-0019-05
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
中学生数理化(高中版.高考理化)(2020年10期)2020-10-27
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
北京航空航天大学学报(2019年4期)2019-05-05
中学课程辅导·教师通讯(2018年10期)2018-09-04
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
新高考·高一物理(2015年6期)2015-09-28
