
一种基于LIDAR的精确月球软着陆目标点选定方法
2009-12-12 05:29王鹏基刘良栋
空间控制技术与应用 2009年6期
梁 栋,王鹏基,刘良栋
(1.北京控制工程研究所,北京100190;2.空间智能控制技术国家级重点实验室,北京100190)
一种基于LIDAR的精确月球软着陆目标点选定方法
梁 栋1,2,王鹏基1,2,刘良栋1
(1.北京控制工程研究所,北京100190;2.空间智能控制技术国家级重点实验室,北京100190)
研究了月球探测器不设悬停阶段的精确软着陆运动中实时目标着陆点的自主选定方法.其过程包括着陆器运动补偿、数字高程图(DEM)的生成、障碍识别和最优安全着陆点搜索4个步骤.采用LIDAR敏感器,由经过运动补偿得到的斜距数据生成DEM,给出一种月面地形坡度和粗糙度的定义,根据安全着陆区的判据进行障碍识别,最后设计中心螺旋式搜索方法对探测器最优安全着陆点进行搜索选定.通过仿真验证了本文方法的有效性和优越性.
激光雷达;月球软着陆;运动补偿;障碍识别;数字高程图
在月球表面成功实施软着陆是进行月球探测的关键性技术,更是为今后开展深空探测和载人登月、建立月球基地奠定了基础.为了在月球表面具有科学价值的区域进行软着陆探测和取样,希望着陆器能够在一些选定的地形复杂区域安全着陆,这就要求月球软着陆器具有较高的着陆定位精度和自主检测障碍进行规避的能力.
综合国内外基于地形识别的月球探测器软着陆安全区识别技术方面的文献可以发现,选择激光雷达(LIDAR,light detection and ranging)这种主动光学成像技术具有比较明显的优势.这是因为LIDAR精度比较高;经解算能够提供高分辨率的着陆区高程图;采用的是主动光源,因此着陆器可以在任意光照条件下完成着陆任务;不需要着陆区精确的地表反照率,具有更强的鲁棒性[1].
由于科学探测任务需要在选定的月面区域精确软着陆,这样的精确制导过程不再设置悬停阶段,要求着陆器能在较快的运动中自主选取目标着陆点.在精确制导控制的过程中必须辅以包含运动补偿的着陆点自主选取技术,以在具有精确性的同时保证探测器软着陆的安全性.本文研究一套完整的月球精确软着陆点自主选定方法,包括着陆器运动补偿、数字高程图的生成、障碍识别和最优着陆点搜索4个步骤,有较强的工程实用性.基于LIDAR的斜距信息由于着陆器的运动而产生偏差,因此需首先经过第一步的运动补偿获得数据,从而生成DEM,再由一种基于高程图数据的危险区识别方法,通过拟合着陆区地形平面计算每个单元格的粗糙度、坡度和与预定着陆点的距离,采用中心螺旋式搜索方法选取着陆区内最优的安全着陆点.这就为实现月球精确软着陆提供了目标着陆点,该过程是月面精确软着陆任务中重要的一环.
1 精确软着陆点自主选定方法
1.1 LIDAR数据的运动补偿
数字高程图(DEM)是描述一定区域范围内地面特性、由有序数值构成的阵列,可以表示为Vk=(xk,yk,zk)(k=1,2,…,n).其中,xk和yk是平面坐标,zk是(xk,yk)对应的高程值.DEM从数学上描述了某一区域地貌形态的空间分布,通过DEM可以方便地分析有关区域内任一点的地形情况.由着陆器机载LIDAR检测设备通过测量激光的飞行时间获取着陆器与月球表面之间的距离,在考虑着陆器平动和姿态运动的情况下(如图1所示),通过一定的几何关系算法获得月球表面的高程信息,生成DEM.
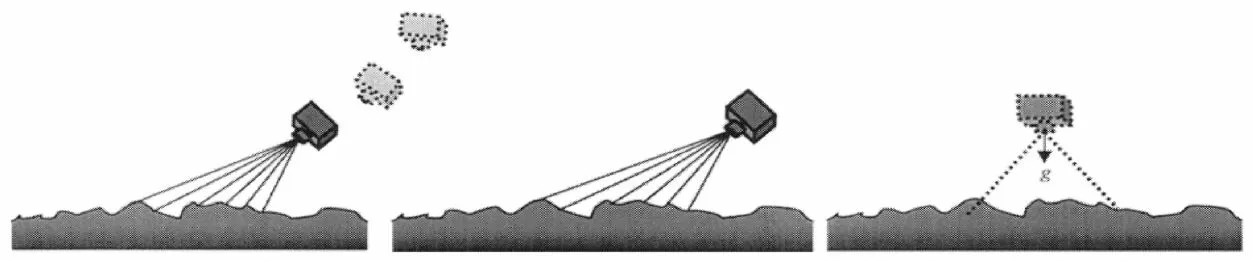
图1 着陆器倾斜姿态时的LIDAR设备检测月面示意图
由于着陆器下降过程中的运动,使得LIDAR的测量数据产生偏差,因此在利用测量数据生成DEM之前需要对其进行成像的运动补偿,包含前补偿和后补偿两个过程.前补偿为LIDAR平台的稳定,即控制LIDAR设备的平台使之在着陆器运动的同时保持扫描正确的区域;后补偿即对着陆器在LIDAR设备成像期间的运动造成的数据失真进行补偿,获得着陆器相对月面静止情况下的高程数据.如图2所示,一个成像时间包括激光由LIDAR设备发射至月面和反射回着陆器被LIDAR设备接收的时间,快门成像时间以及数据处理时间3部分[2].

图2 一次成像时间
图3示出了着陆器在二维平面内的运动补偿情况[3],给出期望扫描区域和一个成像时间始末时刻着陆器的位置,LIDAR设备由左向右进行扫描.其中,图3(a)为未加补偿的情况;图3(b)只进行前补偿保证了正确的扫描区域,却由于着陆器的下降运动造成高度逐渐减小,使得数据产生右倾失真;图3(c)只进行后补偿使数据处理为着陆器在成像时间初始时刻相对月面静止时扫描获得的高程数据,但由于未控制LIDAR平台使扫描覆盖了不期望的错误区域,例如,在一个成像时间0.1s内,由于着陆器的平动(水平速度50m/s,垂直速度10m/s)和转动(俯仰角速度20(°)/s),造成的LIDAR设备(高度200m,扫描角30°)扫描的正方形视场月面图像各自的偏差效果经计算为:水平速度造成月面图像5m的水平速度向位移,垂直速度造成月面图像各边长缩短0.535 9 m,俯仰角速度导致月面图像变为梯形,上底比正方形边长缩短0.929 2m,下底比正方形边长增长1.075 8m,梯形高比原正方形边长增长0.139 6m.因此,只有在进行前后两种补偿的情况下才可获得如图3(d)所示期望的真实扫描数据.
前补偿是由LIDAR设备平台相对着陆器本体的姿态跟踪稳定控制来完成,以保证扫描固定的区域,属于LIDAR设备本身激光束方向控制性能的范畴.这里研究LIDAR成像运动补偿即后补偿过程.
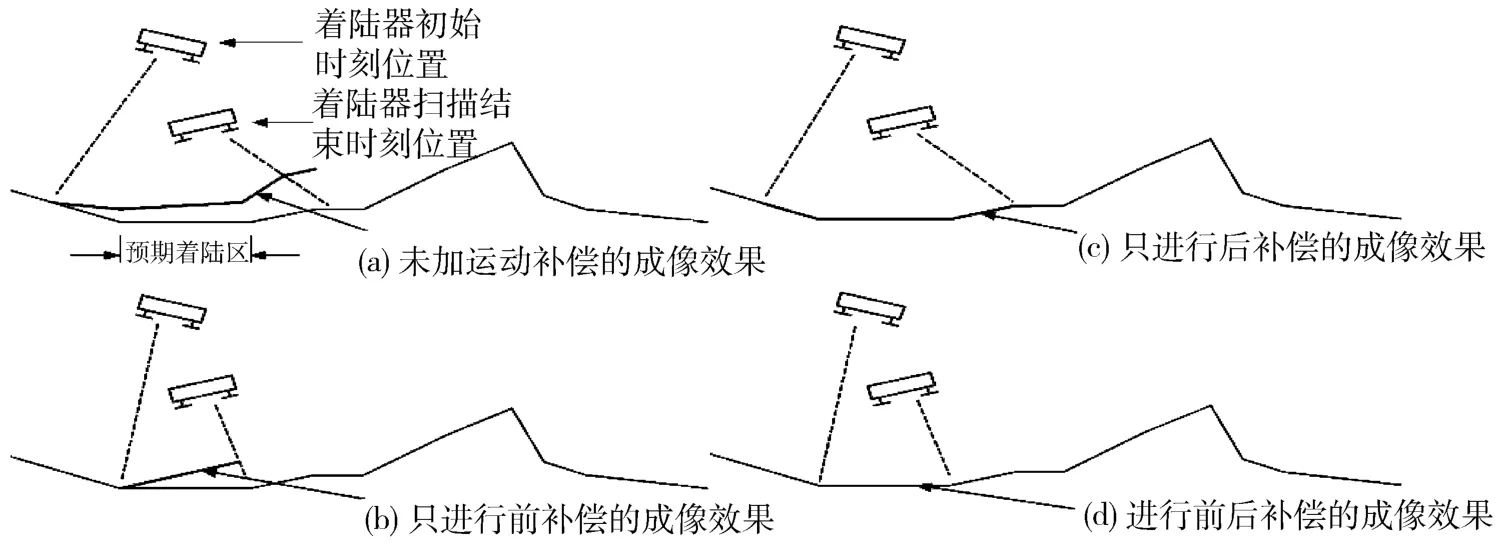
图3 一次成像时间内运动补偿效果图(二维)
针对LIDAR设备的扫描和测量原理,本文提出如下运动补偿算法.
当着陆器精确制导到达预定位置,将正下方的正方形月面区域作为预期着陆区,从该着陆区内选择最优的安全着陆点.以该预定位置为扫描初始位置,机载LIDAR设备对该区域月面地形顺序扫描测距,经斜距换算获得高程信息.建立如图4所示的观测坐标系,当扫描到平面坐标为(xi,yi)的地形点时,着陆器已由初始位置o运动至位置om,激光束方向控制保证了LIDAR设备在同一时刻扫描与在初始位置顺序扫描时相同的地形点,但由于观测坐标系omxmymzm相对作为补偿目标的初始坐标系oxyz发生了平动和转动,因此所得到的斜距与初始位置测量相比有了一定的偏差,运动补偿的目的就是消除着陆器运动带来的斜距测量偏差.
首先通过导航系统获得着陆器的速度和角速度以及LIDAR平台姿态等状态量,从而计算出当前观测坐标系相对初始位置时的姿态和位置信息,进行坐标变换.图4中P点为(xi,yi)位置月面地形的最高点,即激光测距目标反射点,初始时刻和当前位置的斜距分别为图4中所示的和.由当前观测坐标系姿态信息得到其向初始坐标系oxyz的转换矩阵,着陆器相对于初始位置并表示在oxyz下的当前位置为.因此获得(xi,yi)地形点经过运动补偿后的测量斜距:

这样,LIDAR设备将运动补偿后测得的着陆区域地形的期望斜距数据矩阵S进行存储,并输入给数据处理单元,在下一步骤中转换生成数字高程图.
1.2 斜距信息向数字高程图的转换
经过着陆器的运动补偿,获得了修正后的LIDAR测量着陆区域的地形斜距图.再根据几何关系将LIDAR所测斜距转换成高程数据,生成DEM.

图4 运动补偿示意图(三维)

式(2)几何关系中各量为(xi,yi)地形点对应的矩阵中元素,S为LIDAR斜距测量数据矩阵,R为扫描区域地形点到着陆器月面投影的水平距离矩阵,H为着陆器相对于每一单元地形最高点的垂直高度矩阵.
着陆器初始位置到月面平均平面(基本表面)的高度为hm,推导出(xi,yi)位置地形点到着陆器月面投影的水平距离计算公式如下:
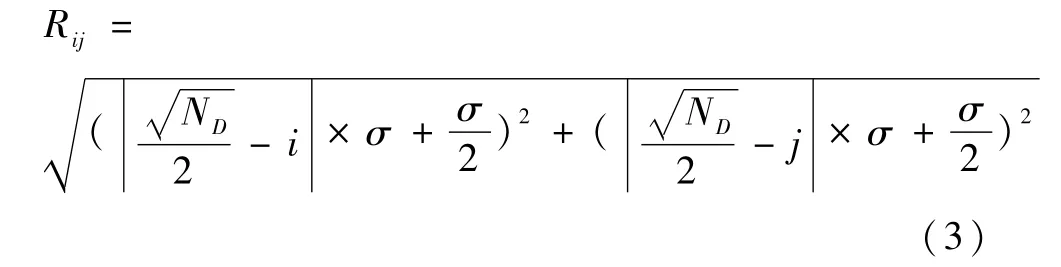
其中,ND为高程值样点数,σ为LIDAR的分辨率.
将式(3)代入式(2)可以求出Hij,再由几何关系求出(xi,yi)位置地形点的高程值

这样就由斜距信息得到了着陆区域地形的高程数据矩阵(DEM阵)Z.
1.3 基于高程图的障碍识别方法
障碍识别的具体方法是由DEM数据拟合着陆区地形的平均平面,在此基础上定义月球表面地形粗糙度和坡度的概念[4],通过算法计算每一地形单元格的粗糙度和坡度,如图5所示,然后根据一定的标准检测出对着陆构成危险的障碍区域和可以着陆的安全区域.
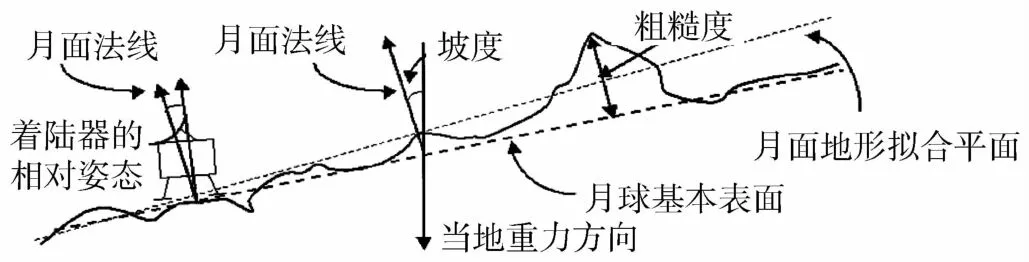
图5 基于月球表面着陆区地形拟合平面的粗糙度和坡度定义
根据LIDAR高程图的分辨率和软着陆器的控制要求,将着陆区(100m×100m)平均划分成大小合适的单元格地形块.用(i,j)标记着陆区中的单元格,其中i和j分别代表单元格所在的行数和列数,每个单元格覆盖Nij个DEM数据点.然后利用每一个单元格所对应的高程图地形块Patch(i,j)中Nij个数据点的坐标值,采用最小二乘法拟合出该单元格地形块的平均平面.
定义拟合平面的方程为

式中,k1、k2和k3为待拟合的参数.Patch(i,j)中有Nij个DEM数据点,记为(xt,yt,zt)(t=1,2,…,Nij).利用这些数据点的坐标,构造Nij×3的矩阵如下:
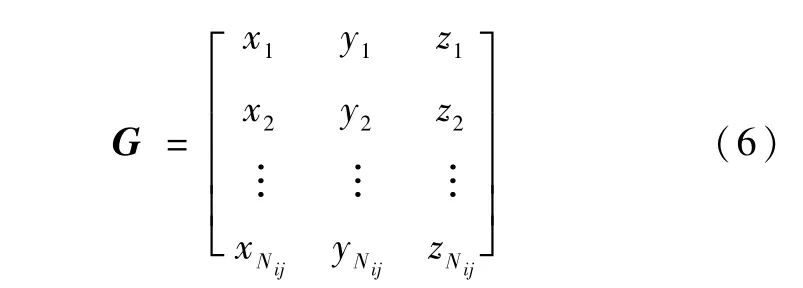
定义Nij维的全1列向量:h=[1 1…1]T.
按照最小方差的原则,求得拟合参数为


平面拟合的残差r由下式计算:

式中,dt为第t个数据点到拟合平面的垂直距离,即

利用残差定义地形粗糙度会忽略一些布有尖峰或陡坑障碍的危险地形,因此本文将粗糙度定义为

给定φsafe为探测器能够安全着陆所允许的月面地形最大坡度,rsafe为探测器能够安全着陆所允许的月面地形最大粗糙度.经过计算,当着陆区域的坡度和粗糙度同时满足φ≤φsafe和r<rsafe时为安全着陆区,否则就是分布着障碍的危险着陆区.具体地说,如果φ≥φsafe,说明整个地形块的平均平面坡度非常陡峭,超出了安全着陆所能接受的范围,着陆器降落在该地形块上容易倾斜、滑移甚至翻倒;如果r>rsafe,说明该区域分布有比较突兀的岩石或内壁较陡的凹坑,使得着陆器的缓冲支架无法正常接触月面从而无法平稳着陆,会出现碰撞、翻倒等危险.采用以上方法即可完成月球软着陆区域的障碍识别和检测.
1.4 最优着陆点的搜索方法
月球探测器在最终着陆段运动过程中进行目标着陆点自主选定时,要求具有较好的实时性.与常规的搜索方法相比,中心螺旋式最优着陆点搜索方法计算迅捷,适合于工程应用[5].因此本文采用中心螺旋式搜索方法对目标着陆点进行最后的选定,具体过程描述如下:
1)结合LIDAR高程图的分辨率,适当选取单元格的尺寸,然后由每块单元格所覆盖的月面地形高程图数据点计算其坡度和粗糙度;
2)根据安全着陆所允许的标准确定每块单元格是否安全.当其坡度和粗糙度满足

则定义为安全单元格;否则为危险单元格.这样就将整个100m×100 m着陆区分成了安全和危险两种单元格组成的障碍识别结果图;
3)定义安全着陆区:覆盖全部为安全单元格的正方形区域,该正方形区域大小由控制精度和着陆器尺寸确定;
4)在障碍识别结果图中,从预定着陆点(着陆区域中心点)开始,以图6所示的螺旋式搜索方法(方向为右、下、左、上顺时针),逐渐向外进行扩展搜索,每次搜索的计算单位是以所到单元格的中心为中心的安全着陆区大小的正方形区域,搜索步长为一个单元格;
5)判定规则:如果搜索至某一正方形区域为安全着陆区时,搜索结束.将该安全着陆区作为最优安全着陆区,其中心单元格位置即选定为目标着陆点.如果搜索完整个视场都未找到最优安全着陆区,则把含危险单元格最少、与最优安全着陆区同样大小的区域作为目标着陆区.
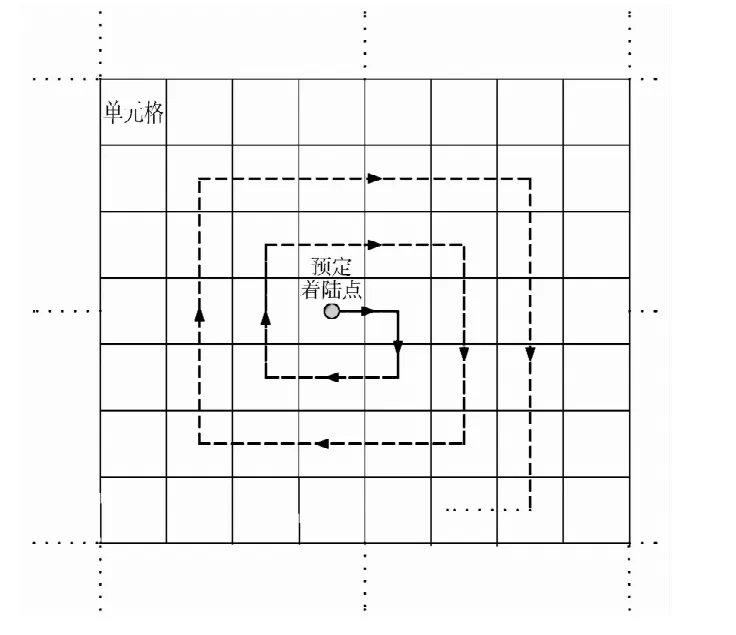
图6 中心螺旋式安全着陆区搜索方法
可以根据不同的着陆器控制精度要求和着陆器的脚间距离,选择所需的相应安全着陆区大小,并把与安全着陆区同样大小的正方形区域作为搜索目标安全着陆区的每步判别计算单位,同样采用这种中心螺旋式搜索方法,就可满足各种软着陆任务的安全要求.
2 数学仿真
2.1 仿真条件
设定的仿真条件如下:
着陆器初始位置高度:hm=200m
月球表面着陆区(数字高程图)范围:100 m×100m
LIDAR高程图分辨率:0.4m
数字高程图高程值样点数:250×250
着陆区地形障碍物高度偏差范围:-2m~2m
安全着陆容许地形块粗糙度:<0.2m
安全着陆容许地形块坡度:≤8°
安全着陆区大小:50m×50m
2.2 仿真结果与分析
按照2.1节提出的方法,将着陆区测量数据逐步进行运动补偿、斜距换算生成DEM,再由DEM获得三维月面地形图和障碍识别结果图,在此基础上完成最后一步的最优安全着陆点选定,给月球精确制导软着陆提供出安全的目标着陆点.下面给出最终的仿真结果.
根据LIDAR高程图的分辨率,在100m×100m的着陆区域中采集了250×250个数据点,生成图7和图8所示的地形图.然后将该地形图平均分成50×50块2m×2m单元格,每块包含5×5个数据点.对于每一块单元格,计算其坡度和粗糙度,如果满足着陆安全要求,即为安全着陆区,标记为白色区域,危险的单元格标记为黑色区域.再以预定着陆点为起点,进行螺旋式搜索,每次移动步长为2 m,即一个单元格,搜索结束条件是找到以某单元格为中心的50m×50m的白色安全区域,并把该单元格的位置用星号标记,此即最优的安全着陆位置.对应A着陆区的搜索结果如图9所示,目标着陆点的位置为(42,58),方框区域即为最优安全着陆区.而对应B着陆区在图10中的情况是搜索完整个视场都未找到最优安全着陆区,那么将含有危险单元格数目最少的50m×50m区域作为目标着陆区,如图中方框所示,星号标记的着陆点位置为(26,68).这就完成了月球精确软着陆目标着陆点自主选定的整个过程.
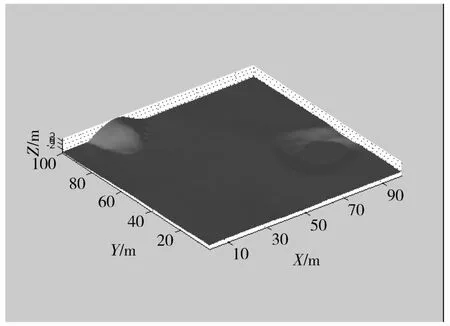
图7 由高程数据生成的A着陆区地形图

图8 由高程数据生成的B着陆区地形图
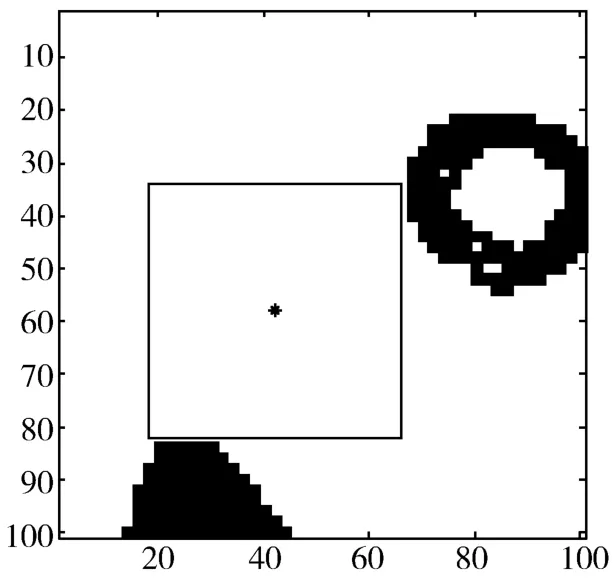
图9 针对A着陆区的障碍识别和目标着陆区搜索结果
通过仿真发现,中心螺旋式方法是一种比较有效的安全着陆点搜索方法.该方法在工程允许的范围内考虑了实际中地形块与着陆器尺寸的关系,做了适当的近似,对划分的每一块单元格进行单独计算识别,这使得运算量大大减少,并且解决了控制精度和着陆区边界带来的问题,使着陆安全性更高.通过与常规搜索方法进行仿真比较发现,该方法运算速度很快,实时性好,可以迅速地识别障碍,得到目标安全着陆点.另外,通过调整LIDAR分辨率和安全着陆容许指标等参数即可满足不同的着陆任务要求,因此该方法有着广阔的应用前景.
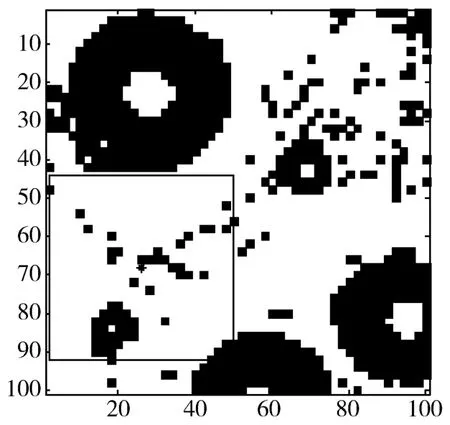
图10 针对B着陆区的障碍识别和目标着陆区搜索结果
3 结 论
本文针对月球探测器软着陆过程的一项关键性技术即自主障碍识别、目标安全着陆点选定方法进行研究.基于LIDAR提供的斜距测量信息进行运动补偿,消除了着陆器运动带来的“漂移”、“斜视”等偏差效果的影响,将补偿后的斜距信息转换成高程图数据,再给出月面地形块坡度和粗糙度的定义和计算方法进行障碍识别,最后根据常规思维、计算量和实时性要求设计了一种安全着陆点搜索方法.仿真验证了本文提出的这种月球精确软着陆目标安全着陆点自主选定方法的实时性和有效性,为今后深空探测精确软着陆提供了一项重要的技术准备.
[1] 朱圣英,崔平远,崔祜涛.基于LIDAR的月球软着陆器障碍检测规避方法[C].中国宇航学会深空探测技术专业委员会第三届学术会议,西安,2006
[2] Slatton K C,Carter W E,Shrestha R.A simulator for airborne laser swath mapping via photon counting[C].SPIE,Bellingham,WA,2005
[3] Allen A CM,Langley C,Mukherji R,et al.Full-scale testing and platform stabilization of a scanning LIDAR system for planetary landing[C].SPIE,Orlando,FL,2008
[4] Lafontaine J d,Ulitsky A,Tripp JW,et al.The development of a scanning LIDAR system with GNC for autonomous hazard avoidance and precision landing[C].SPIE,Bellingham,WA,2004
[5] 梁栋,王鹏基,刘良栋.月球软着陆障碍识别和最优安全着陆区搜索方法研究[C].中国宇航学会第三届学术年会,北京,2008
A LIDAR-Based Autonomous Landing Site Selection Method for Pinpoint Lunar Soft Landing
LIANG Dong1,2,WANG Pengji1,2,LIU Liangdong1
(1.Beijing Institute of Control Engineering,Beijing 100190,China;2.National Key Laboratory of Science and Technology on Space Intelligent Control,Beijing 100190,China)
This paper studies an autonomous landing site selection method for lunar pinpoint soft landing during lander’smotion.Themethod includes 4 steps:motion compensation,digital elevation map generation,obstacle detection and optimal safe-site search.According to the compensated data provided by light detection and ranging,the digital elevation map is generated,then the definitions of the lunar surface roughness and slope are given,and a safely landing criterion is presented to detect the obstacle.Based on this concept,a central-helix searchingmethod is designed to select the optimal safe landing site for lunar landers.The simulation results show validity and superiority of the autonomous landing site selection method.
light detection and ranging;lunar soft landing;motion compensation;obstacle detection;digital elevation map
2009-09-25
梁 栋(1982—),男,山东人,博士研究生,研究方向为深空探测航天器自主控制(e-mail:liangdong702@hotmail.com).

V448
A
1674-1579(2009)06-0024-06
猜你喜欢
英语世界(2022年5期)2022-05-18
电力勘测设计(2022年2期)2022-03-08
空间科学学报(2021年2期)2021-07-21
华北理工大学学报(自然科学版)(2020年4期)2020-11-05
中国惯性技术学报(2019年5期)2020-01-07
航天器工程(2019年4期)2019-11-11
伙伴(2019年12期)2019-01-17
北京航空航天大学学报(2017年4期)2017-11-23
中学科技(2015年7期)2015-07-03
航天器工程(2014年4期)2014-03-11
