基于 MEMS器件的旋转调制式航姿参考系统设计
2010-03-16 09:22徐烨烽吕妍红
北京航空航天大学学报 2010年11期
徐烨烽 吕妍红
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
仇海涛
(北京航天控制仪器研究所,北京 100854)
基于 MEMS器件的旋转调制式航姿参考系统设计
徐烨烽 吕妍红
(北京航空航天大学 仪器科学与光电工程学院,北京 100191)
仇海涛
(北京航天控制仪器研究所,北京 100854)
为实现中精度、低成本的航姿测量系统,提出了一种基于低精度 MEMS(Micro Electronic Mechanical System)陀螺旋转调制技术的解决方案.系统采用四元数及三子样法进行航姿解算,可选用全自主及快速两种对准模式.全自主对准采用基于速度观测的 Kalman滤波方案,利用 30(°)/h的 MEMS陀螺可实现优于 5°的航向对准精度;快速对准时航向角由磁场计提供,经磁罗差补偿后航向精度优于 0.4°.静态及动态实验结果表明:旋转调制可将MEMS陀螺的精度提高 30倍左右,系统在 1h内的航姿保持精度优于 1°.
航姿参考系统;微机电系统;初始对准;磁罗盘;罗差
传统的基于低精度 MEMS(Micro Electronic Mechanical System)惯性器件的航姿参考系统一般利用加速度信号和地磁场信号分别进行姿态和航向解算,但当系统处于运动状态或其周围磁场被干扰时,加速度计及磁场计的输出很难准确地反映航姿信息[1].
本文设计一种基于 MEMS惯性器件的旋转调制式航姿参考系统.通过旋转调制,可以将速率级 MEMS陀螺的性能提高至战术级,使之满足航姿参考系统的使用要求.
1 旋转调制技术
所谓旋转调制技术,是指在旋转机构的拖动下,惯性器件敏感轴相对某一固定坐标系(一般选载体坐标系)旋转,从而使得与旋转轴正交方向的陀螺、加速度计常值(或慢变)误差被调制成均值为 0的周期变化量,使其不再成为影响系统精度的主要因素[2-4].设 x向陀螺的漂移为 εx,z向陀螺的漂移为 εz,x-z平面绕 y轴以 Ω的角速度旋转,则载体系下的陀螺漂移 εx和 εz为

由式(1)可知,陀螺的常值漂移被调制成均值为 0的正弦或余弦分量.
2 航姿参考系统组成
如图 1所示,系统由 2个单元体组成,单元体1旋转轴铅垂,调制水平面内的 x,y陀螺及加速度计;单元体 2旋转轴水平,调制铅垂面内的 x′,z陀螺和加速度计.
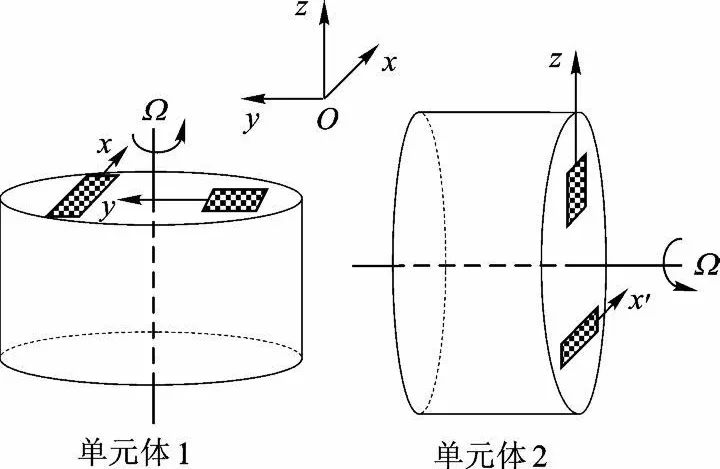
图1 航姿参考系统结构组成
系统的工作原理如图 2所示,陀螺及加速度计的输出信号 ωm,am经坐标分解后转换为机体系下的角速度和加速度信号 ωb,ab.对 ωb,ab进行误差补偿后可进行航姿解算.其中,初始航向可自主解算,也可由磁罗盘给入.
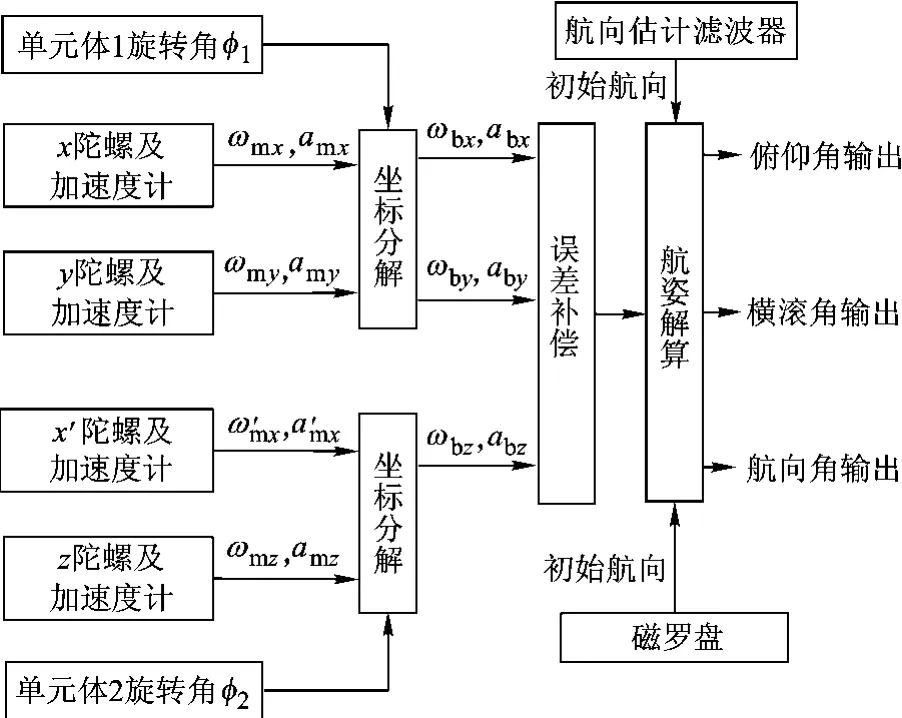
图2 系统工作原理
系统选用美国 AD公司的 ADIS16130型MEMS陀螺和瑞士 Colibry公司的 MS8002型MEMS加速度计,器件在常温下的零偏不稳定性约为 30(°)/h和 0.1mg.转角测量装置选用英国Renishow公司的圆光栅,角度测量精度为 5.6″.
坐标分解误差、电机旋转角速度对陀螺的耦合误差、加速度计杆臂效应是影响旋转调制精度的主要因素.因此,除选用高精度光栅外,需要对陀螺安装偏角及加速度计安装杆臂进行精确标定.
3 航姿解算算法
系统使用四元数更新姿态,其微分方程为
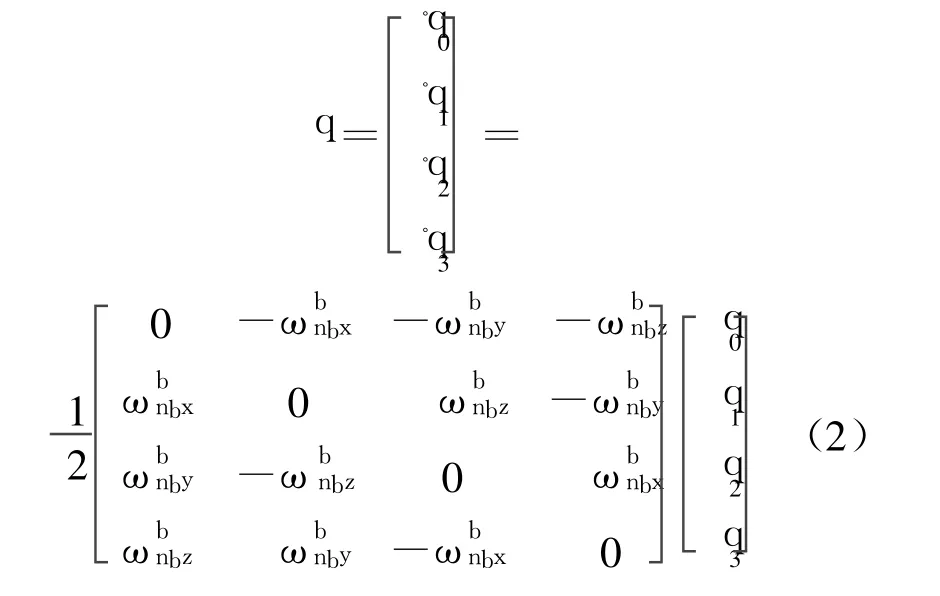
解以上四元数微分方程可得

式中,Δθi为当前更新周期 Δt内的第 i个采样值(i=1,2,3);;Δθ可表示为
4 初始航姿引入
航姿参考系统在使用前必须进行初始对准,重点是航向对准.一般情况下,MEMS陀螺无法完成自主航向对准,需要外界给定航向.对于本系统,旋转调制使得利用 MEMS陀螺进行初始对准成为可能,但由于陀螺噪声较大,对准时间较长,一般需 3min.
在需要快速对准的场合,可采用航向给定的方案,这一方案需借助辅助设备且对使用环境有一定要求.例如使用磁场计时要求周围的电磁环境不发生改变.
4.1 基于惯性器件输出的 Kalman滤波对准
1)状态变量.取 Kalman滤波器的状态变量为

式中,φ=[φeφnφu]为姿态误差,φe为俯仰角误差,φn为横滚角误差,φu为航向角误差;Δv=[ΔveΔvn]为速度误差 ;ε=[εxεyεzεx′]为敏感轴上的陀螺漂移;n=[nxnynznx′]为敏感轴上的加速计零偏.
2)状态方程.
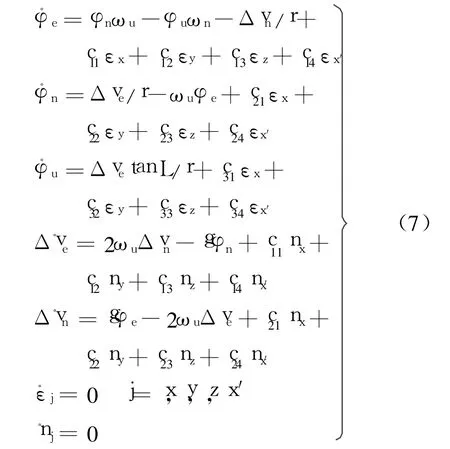
式中,ωn,ωu分别为地球自转角速度的北向和天向分量;r为地球半径;[cij]3×4为惯性器件测量坐标系至地理坐标系的变换矩阵.以陀螺为例,设敏感轴方向的 4个常值漂移为 εx,εy,εz,εx′;单元体 1和 2的旋转角分别为 φ1和 φ2,则机体系的等效漂移 εxb,εyb,εzb可表示为
地理系的陀螺漂移 εe,εn,εu可表示为

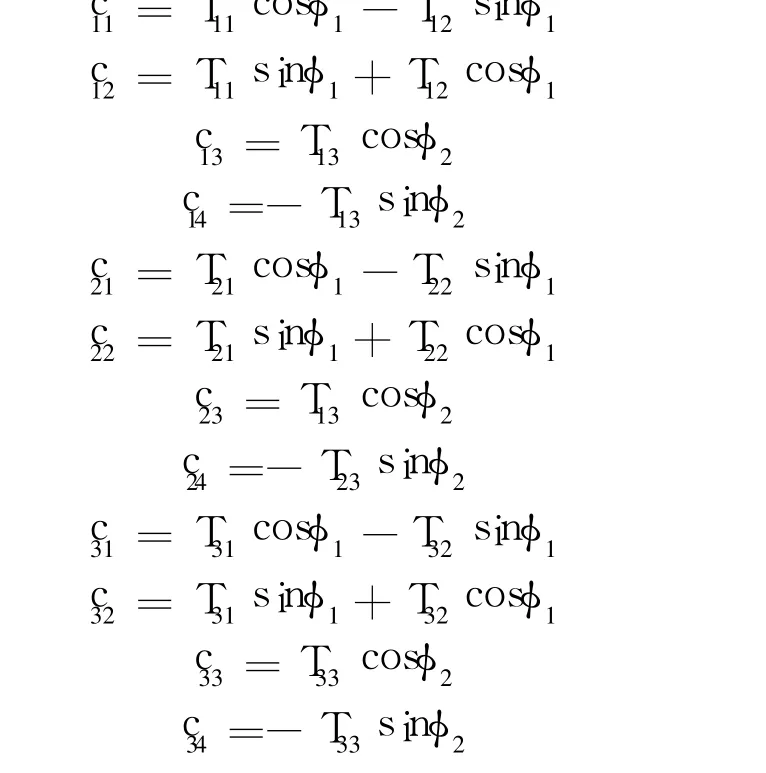
将式(8)代入式(9),可得到 [cij]3×4的表达式为
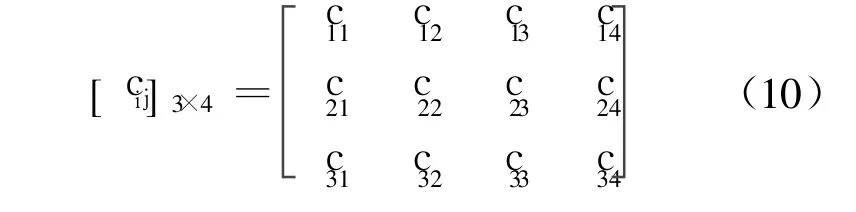
式中
3)量测方程.初始对准在静基座下完成,系统的输出速度为速度误差.以速度误差作为量测,构建 Kalman滤波器,可实现对航姿误差及陀螺漂移的估计.量测方程可表示为

4)对准结果.图 3为一次对准实验得到的航向角估计曲线,表 1为 4次实验得到的对准结果.由实验结果可知,姿态角的对准精度约为 5″,航向角的对准精度约为 5°,收敛时间约 2min.
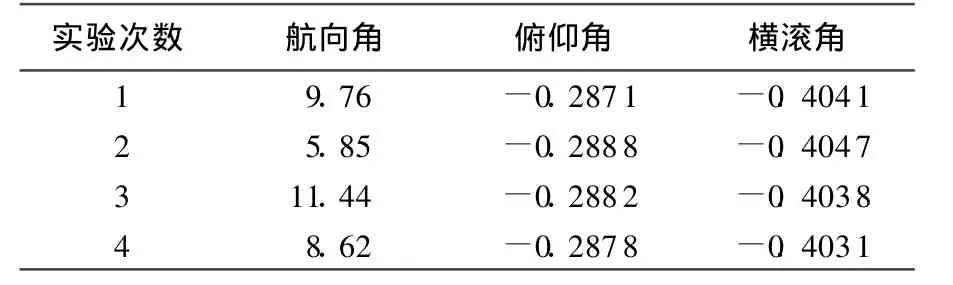
表 1 初始对准结果 (°)
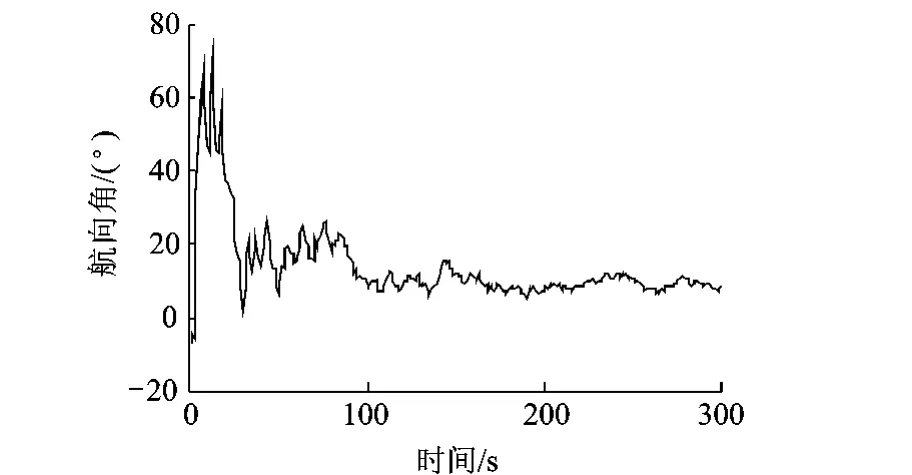
图3 航向角估计曲线
4.2 基于磁场计的快速对准方案
在要求快速对准的场合,可采用磁航向引入的对准方式,但磁场计易受到周围环境中硬铁和软铁磁场的影响而产生磁罗差.以双轴磁传感器为例,未受磁场干扰时,将其在水平面内均匀旋转一周,得到双轴磁传感器数据(Hx,Hy)的轨迹为一个以(0,0)为圆心的圆.硬铁干扰磁场造成圆轨迹的圆心偏离(0,0),软铁干扰磁场则使圆轨迹变成一个椭圆,如图 4所示.为确保磁航向输出精度,必须对磁场计进行罗差补偿[5-7].
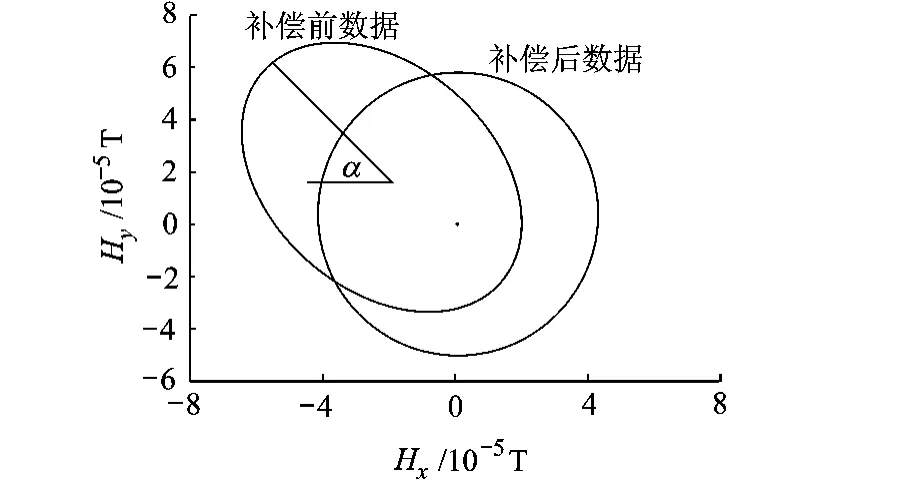
图4 x-y双轴磁传感器数据补偿
由图 4可得到水平面内的罗差补偿公式为
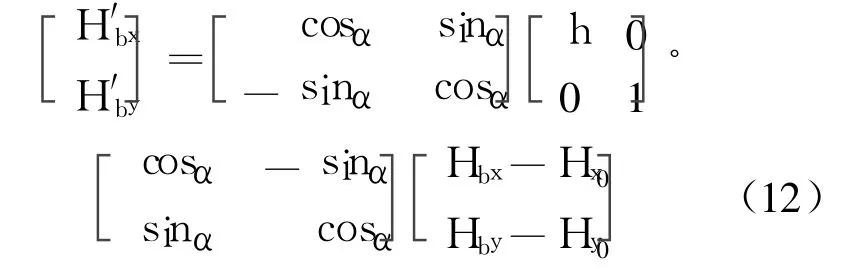
式中,Hbx,Hby为补偿前的双轴磁传感器数据;H′bx,H′by为补偿后的双轴磁传感器数据;α为椭圆发生旋转的角度;h为椭圆的短轴与长轴长度之比;Hx0,Hy0为圆心偏离值.
在实际使用中,需要根据系统给出的俯仰角θ和横滚角 γ对磁传感器数据进行非水平状态补偿,其补偿公式为
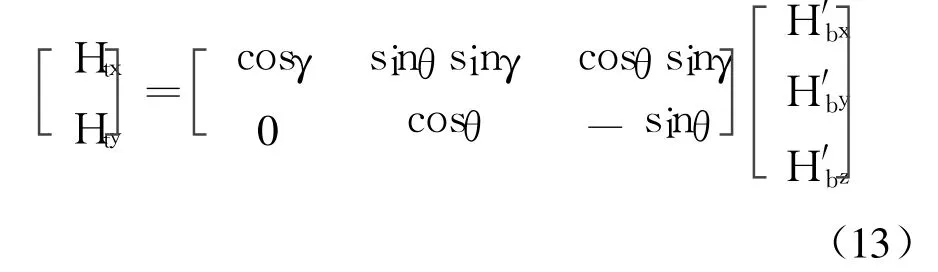
式中,H′bx,H′by,H′bz为经罗差补偿后的机体系的磁场强度;Htx,Hty为当地水平面内的磁场强度.图 5为磁罗差补偿前后航向角输出曲线.
如图 5所示,经罗差补偿后,磁航向角的输出精度得到较大改善.表 2为磁航向角静态输出精度测试结果,由表 2数据可知,经罗差补偿后,磁航向的静态精度约为 0.4°.
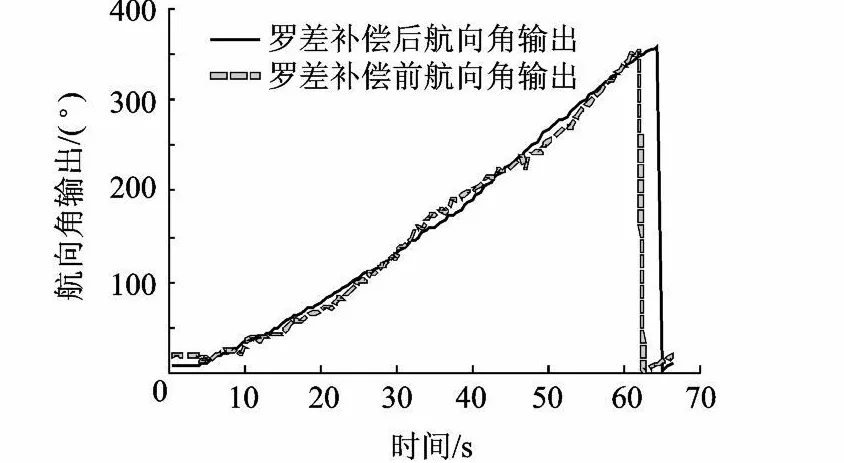
图5 罗差补偿前后航向角输出曲线
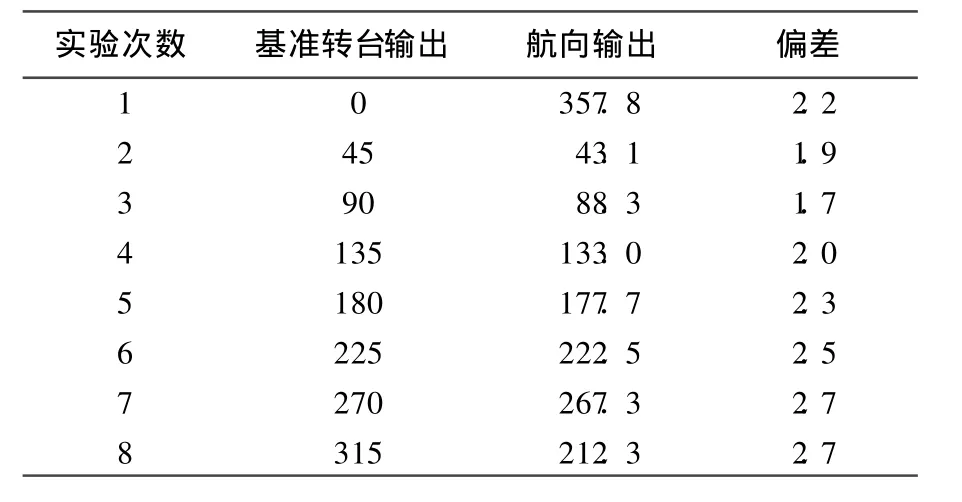
表 2 磁航向角静态输出精度 (°)
5 实验结果
为验证航姿参考系统的输出精度,分别进行了静态和动态实验.
静态实验在水平位置转台上进行,初始对准结束后采集系统的姿态和航向角输出,得到的航姿输出误差如图 6所示.动态实验采用车载方式,将系统的航向输出与精度为 0.01(°)/h的某型惯导的航向输出做比较,考察其精度.实验结果如图 7所示.
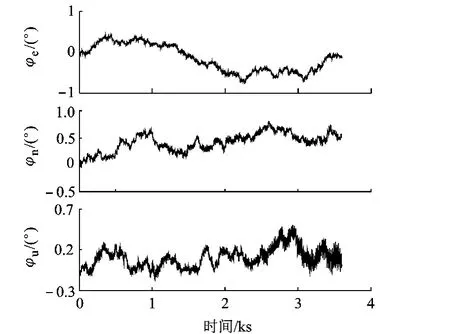
图6 静态实验航向姿态输出误差
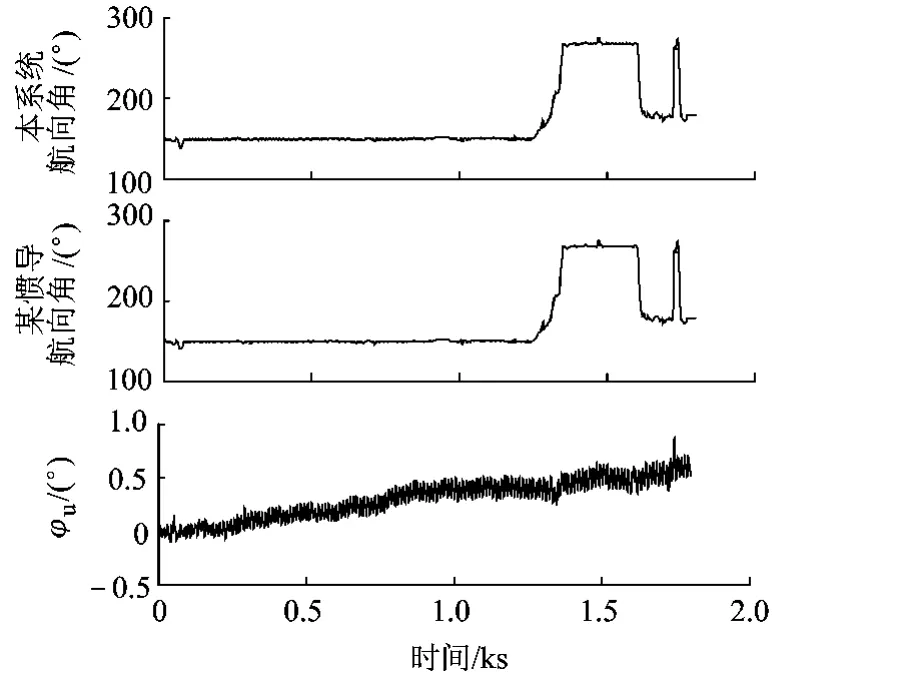
图7 车载实验航向角输出结果
由图 6及图 7可知,静止状态下,系统在 1h内的航姿保持精度优于 0.5°;车载条件下的航向保持精度优于 1°.
6 结 论
本文设计了一种基于 MEMS惯性器件的旋转调制式航姿参考系统.通过旋转调制,将漂移为30(°)/h的 MEMS陀螺的精度提高至 1(°)/h左右.静态和动态实验结果表明:系统在 1h内的航姿保持精度优于 1°.系统利用惯性器件进行独立的航姿解算,不依赖外界信息,也不向外辐射能量,具有较强的抗干扰性,是一种自主航姿测量系统.本系统的成功研制为中精度、低成本、高可靠性航姿参考系统的实现提供了一条切实可行的解决途径.
References)
[1]沈晓蓉,张海,范耀祖,等.微捷联姿态系统的一种扩展卡尔曼滤波方法[J].北京航空航天大学学报,2007,33(8):933-935 Shen Xiaorong,Zhang Hai,Fan Yaozu,et al.Extended Kalman filtermethod for m icro-inertial strapdown attitude determination system[J].Journal of Beijing University of Aeronautics and Astronautics,2007,33(8):933-935(in Chinese)
[2]Yang Yong,Miao Lingjuan.Fiber-optic strapdown inertial system with sensing cluster continuous rotation[J].IEEE Transaction on AES,2004,40(4):1173-1178
[3]Zhang Ling,Liu Jianye,Lai Jizhou.Rotating fiber optic gyro strap-down inertial navigation system with three rotating axes[J].Transactionsof Nanjing University of Aeronautics&Astronautices,2008,25(4):289-294
[4]王锦瑜,冯培德.激光陀螺速率偏频系统的分析与研究[J].航空学报,2001,22(1):46-50 Wang Jinyu,Feng Peide.Research on rate-bias system of laser gyro[J].Acta Aeronautica et Astronautica Sinica,2001,22(1):46-50(in Chinese)
[5]付旭,周兆英.MEMS自动驾驶仪中的多传感器误差补偿[J].清华大学学报:自然科学版,2008,48(5):804-807 Fu Xu,Zhou Zhaoying.Error compensation with multiple sensors in a MEMS autopilot[J].Journal of Tsinghua University:Science and Technology,2008,48(5):804-807(in Chinese)
[6]Crassidis JL,Lai K L,Harman R R.Real-time-attitude-independent three-axis magnetometer calibration[J].Journal of Guidance,Control and Dynamics,2005,28(1):115-120
[7]郝振海,黄圣国.基于差分磁罗盘的组合航向系统[J].北京航空航天大学学报,2008,34(4):377-380 Hao Zhenhai,Huang Shengguo.Integrated heading system based on differential magnetic compasses[J].Journal of Beijing University of Aeronautics and Astronautics,2008,34(4):377-380(in Chinese)
(编 辑:赵海容)
Design of rotation modulation AHRS based on MEMS sensor
Xu Yefeng LǜYanhong
(School of Instrument Science and Opto-electronics Engineering,Beijing University of Aeronautics and Astronautics,Beijing 100191,China)
Qiu Haitao
(Beijing Aerospace Control Device Institute,Beijing 100854,China)
In order to achieve a high-precision,low-costattitude and heading reference system(AHRS),the approach of using rotation modulation technology based on low-per form an cemicro electronic mechanical system(MEMS)gyro was proposed.Quaternion and three sub-sample algorithms were used to calculate the heading and attitude angles.Twokinds of alignment modes,selfalignm ent and rapid alignment could be alternated.The selfalignment was accomplished by Kalman filter based on velocity observation.The heading alignment accuracy would be better than 5°by using MEMSgyro with the driftabout30(°)/h.When the rapid alignment solution was used,the heading was provided by magnetic compass and the accuracy would be better than 0.4°when the magnetic compass deviation was compensated.Static and dynamic experiments results show that the rotation modulation approach can imp rove the precision of MEMS gyro by about 30 times,the output accuracy of the system isbetter than 1°within 1 h.
attitude and heading reference system;micro electronic mechanical system;initial alignment;magnetic compass;magnetic deviation
V 241.6
A
1001-5965(2010)11-1343-05
2009-10-09
徐烨烽(1982-),男,浙江上虞人,博士生,yfxu@asee.buaa.edu.cn.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
新世纪智能(高一语文)(2021年3期)2021-07-16
中国民航大学学报(2020年2期)2020-06-15
民用飞机设计与研究(2019年4期)2019-05-21
中国惯性技术学报(2019年1期)2019-05-21
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
电子制作(2017年24期)2017-02-02
探测与控制学报(2015年4期)2015-12-15
探测与控制学报(2015年4期)2015-12-15