
一种钢带牵引并联机构的机械结构设计
2012-02-20 03:31刘大为
装备制造技术 2012年8期
樊 锐,刘大为
(北京航空航天大学 机械工程及自动化学院,北京 100191)
半柔性冗余并联机构由钢带牵引(steel-banddriven)介于刚性杆支撑并联机构(strut-supported parallel mechanism)与柔性绳牵引并联机构(wire-driven parallel mechanism)之间[1]。与伸缩杆式机构相比,钢带行程大,可增加机构工作空间,且整体质量小,可减小惯性;与绳牵引并联机构相比,钢带的弹性变形较小,易于精确控制。另外,钢带宽度方向有一定的刚度,具有抗扰动能力,提高了动平台位置精度和运动过程中的平稳性。因此,钢带式并联机构,具有较好的工程应用前景。
本文介绍了一种立面1R2T(沿X、Y向移动、绕Z向转动)钢带牵引并联机构。以下就其设计进行分析。
1 理论分析
并联机构处于奇异位形时,机构因失去刚度,而不可控,因此奇异性分析是设计和控制并联机构的前提。
由于钢带只能受拉,所以其奇异性分析与绳牵引并联机构类似。O.Ma给出了发生构型奇异的条件:
(1)如果动平台和静平台是相似的正多边形,则整个工作空间内雅戈比矩阵都是奇异的;
(2)如果动平台和静平台是相似的非正多边形,并且每一对相应的顶点通过一条连杆相连,则雅戈比矩阵JT非满秩,在工作空间内的大部分区域都是奇异的[2]。
钢带牵引与绳牵引机构类似,借用绳牵引并联机构可控工作空间的定义:
m条钢带牵引n自由度并联机构,给定一个位姿X,如果作用在动平台上外力螺旋(外力螺旋为稳定不变的力,如重力)向量WR∈Rn,各条钢带的拉力分布T∈Rm,满足JTT=WR,且T>0,则X属于可控工作空间,这里m≥n+1,T=(t1,…,tm)T,JT静力学雅克比矩阵(小节1.2将给出其计算过程)[3]。依据此定义,若并联机构自由度为3,则至少需要4条钢带牵引,且钢带均受拉力,才能满足工作空间内可控。
1.1 位姿求解
如图1所示,
P(x,y,准)为动平台中心点;
x,y分别为绝对坐标系下位置;
准为动平台与水平面的夹角;
ki=表示驱动关节点Ai在固定坐标系{O}中的位置向量;
hi=表示从质心P到钢带与动平台连接点Bi的向量;
Li=表示钢带的向量。
根据平面几何的矢量封闭原理和坐标变换公式,模型中各向量满足关系:

其中,X是从A1点到机构平面内P点的矢量。
式(1)中

将式(1)展开,可得第i根钢带的向量在X轴和Y轴上的投影向量:

而第i根钢带的长度可表示为

实际运动过程中,对于所需位姿(x,y,准),通过式(3)求得钢带长度值,通过电机驱动钢带,达到动平台位姿控制。
1.2 受力分析
动平台所受的力和力矩如图2所示。

图2 动平台受力简图
其静力学方程为

ti为第i根钢带的拉力;
FR和MR分别为动平台受到的稳定不变的外力和外力矩;
ui为沿钢带方向的单位向量
T 是 ti组成的向量(t1,t2,t3,t4)T;
WR=(FR,MR)T=(FRx,FRy,MRz)T是动平台的力螺旋向量。
WR满足关系:

式中,JT为静力学雅克比矩阵:

JT矩阵是3×4的矩阵,由于其不是方阵,不存在逆阵,通过矩阵分析利用Moor-Penrose广义逆(即伪逆矩阵),当已知动平台所受外力,可得钢带拉力为

式中,
(JT)+为JT的Moore-Penrose广义逆;
(JT)+WR为方程(7)的最小范数解;
Tnul为 JT矩阵零空间 N(JT)缀R4×1的一个分量,JTT的通解,即方程(7)的钢带拉力零空间解;
λ是一个不为0的比例系数,λ取值不同,式(5)求得钢带拉力也不同,但是通过对拉力零空间解的规划,可以保证绳索拉力解的唯一性。
2 结构设计
理论计算时,将动平台的位置与姿态离散,对应为一系列的钢带长度。动平台由一个姿态到另一姿态,是通过不同的钢带长度组合得到的[4]。
钢带的缠绕方式有单层和多层缠绕,如图3所示。
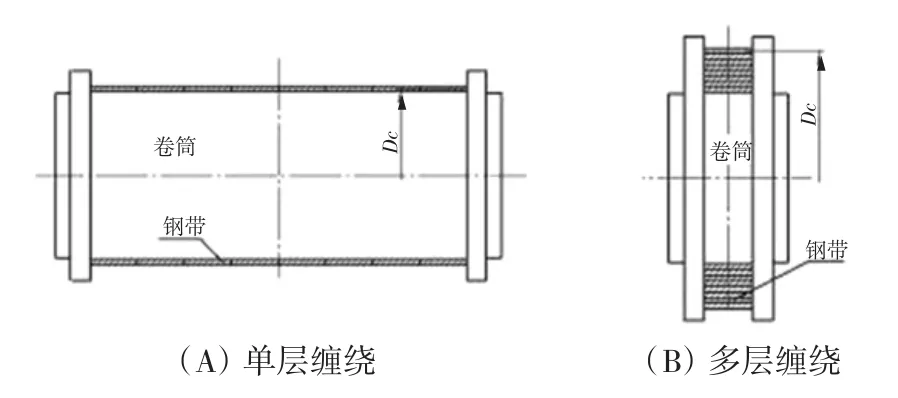
图3 钢带卷绕方式
由于钢带有一定厚度,采用(B)方式时弯曲应力比(A)大,节省空间。
但从控制角度看,(B)方式中钢带中心处直径Dc在卷绕过程中,一直都在变化,若编码器与卷筒同轴,难以获得等量反馈脉冲数。若将编码器与卷筒分离,则可解决这个问题。
平面三自由度并联机构,需要有4根钢带牵引,才能完成控制。4个驱动单体放置在静平台四角:以Ai(i=1,2,3,4)点作为出带点。Ai点在驱动单体的一侧中心线上。单体的结构布局与绕带方式都完全相同,实现了模块化设计。
单体主要由电机轮、测长轮和测力轮等部分组成,如图4所示。

图4 驱动单体机构简图
电机轮包括卷筒和带电机。张力传感器实现钢带内张力的测量。编码器,用来测量放出或收回钢带的长度,压紧轮保证钢带与码盘轮贴紧。两个出线过轮的切点在中心线上,保证出带位置不变。
若将动平台设计成正方形,则静平台必须是非正方形,否则会产生奇异。此时1R2T并联机构工作空间内都有rank(JT)=rmax=3,因此机构中无奇异状态。
3 精度分析
动平台的位姿精度,主要受到以下因素影响:
(1)码盘测量精度;
(2)载荷作用下,钢带变形;
(3)出带点位置误差。
对于(1)和(3),采用压紧轮可避免钢带打滑,在制造时严格控制装配定位关系,该误差是系统误差,可通过标定来补偿。
本样机钢带弹性模量为200 GPa,截面积A=10 mm×0.2 mm=2 mm2,静平台长宽分别为997 mm和846 mm,动平台总质量24 g。
所以外力螺旋 WR=[0,-0.24,0]T
将式(7)通过MATLAB编程,求得空间内最大受力30 N,此时钢带长l=791mm。
根据材料力学计算,钢带受力时伸长量

对动平台运动精度的影响不大。
4 相关实验
为考察驱动单体的运行精度和重复性,进行了驱动单体带50 N负载时,运行位置精度测试实验。图5所示为实验流程及实验现场。

图5 实验原理及实验系统
闭环控制钢带伸缩量,重复收放行程,记录动平台的位移量,与理论值作比较。结果见表1。

表1 驱动单体位置精度测试表1 (单位:mm)
可以看出,在钢带收放时,存在误差,这主要与负载重力和电机停转时电压有关。这是因为PMAC输出停转指令后,由于惯性作用,电机仍然具有瞬时速度。停转电压越大,惯性越大,误差越大;而放钢带时,受负载重力的影响,误差更大。可减小负载,并通过实验测得电机收钢带时负载的最小电压,通过降低停转电压,减小加减速度。通过这种方法可有效减小了误差。表2为改善实验方法后钢带长度变化情况。

表2 驱动单体位置精度测试表2 (单位:mm)
在驱动单体标定实验的基础上,进行了钢带牵引机构无旋转的单方向运动控制实验,如图6所示。

图6 动平台牵引实验系统
图 7以 准=0°,由点(301,153) 运动到点(351,153)时,动平台实际运动位姿与理论值的对比结果。X、Y最大误差分别为1.2 mm和1 mm,最大转角误差为0.12 rad。
误差产生的原因主要有:
(1)零点及方向位置点坐标准确测量;
(2)脉冲当量标定;
(3)控制算法等。
这些都是后续工作的内容。
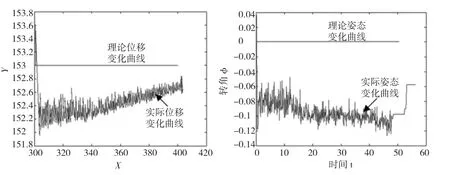
图7 动平台位姿变化曲线
5 结束语
本文介绍了立面1R2T钢带牵引并联机构的初步研究成果。通过对机构奇异性和可控性的分析,可以得到机构可控和不发生奇异的条件,以及钢带张力变化规律,明确结构设计应注意的问题,经实验标定掌握单体控制精度,机构动平台的运动控制,实验证明了理论分析及结构设计的合理性,为钢带牵引并联机构的进一步研究打下了基础。
[1]郑亚青,刘雄伟.绳牵引并联机构的研究概况与发展趋势[J].中国机械工程,2003,14(9):808-810.
[2]赵 泽.大射电望远镜悬索馈源支撑系统的机械结构设计与分析[D].西安:西安电子科技大学,2003.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
山东冶金(2022年1期)2022-04-19
中学生数理化·中考版(2021年10期)2021-11-22
航空发动机(2020年3期)2020-07-24
电子制作(2019年23期)2019-02-23
消费导刊(2018年8期)2018-05-25
发明与创新·中学生(2018年2期)2018-02-07
中国钢铁业(2017年7期)2017-09-03
时代英语·高二(2017年4期)2017-08-11
天津体育学院学报(2016年3期)2016-12-18
