基于Solidworks齿轮连杆机构的运动仿真
2012-03-20 03:33陈赛克
食品与机械 2012年6期
陈赛克 凌 轩
(仲恺农业工程学院机电工程学院,广东 广州 510225)
在食品包装机械中,根据工艺要求,如包装材料的供送及无需定位的切断,糖果的拉条成型及切断分割等,均需要执行构件作间歇瞬时停歇运动[1-3]。槽轮机构虽能实现时动时停的间歇运动,但传动时存在柔性冲击,满足不了食品包装机械对物料高速输送的要求。齿轮连杆机构能实现复杂的运动规律,且运动平稳、易于调节,为此,常采用之以实现这样的功能要求。但齿轮连杆机构运动分析和综合[4]都比较困难,没有通用的算法,在一定程度上又影响了这类机构特性的发挥。
本设计应用Solidworks三维设计软件快速建立齿轮连杆机构模型,并进行运动仿真,获得输出轮的位移、角速度和角加速度。分析机构主要参数对输出轮运动规律的影响,从而确定其合理值,使机构达到预期的位移、速度及短暂停留等要求。
1 三齿轮连杆机构的工作原理和参数的选取
齿轮连杆机构由齿轮机构及四杆机构组合而成,图1为其工作原理图。图1中曲柄AB 为主动件。回转副B、C、D上分别装有3个直齿圆柱齿轮。齿轮1与曲柄固连,即齿轮1跟随曲柄一起绕回转副A 作匀速转动。齿轮3为输出件。在实际设计中,为便于设计、制造和使用,通常取z1=z3,z2=(1~2)z1,机架AD长度l4设计成固定整数值,曲柄AB长度l1设计成可调值。齿轮的模数和齿数根据传递功率、结构等条件加以确定。齿轮的模数和齿数一旦确定后,则四杆机构中的连杆长度l2和摇杆长度l3即可确定,即:

式中:

图1 三齿轮连杆机构运动简图Figure 1 Kinematic sketch of three gear linkage mechanism
r1—— 齿轮1的分度圆半径,mm;
r2—— 齿轮2的分度圆半径,mm。
正是由于齿轮1不会绕其轮心B转动,使得齿轮的啮合传动形式有了很大变化,导致从动轮3会出现3种不同的运动规律:①不等速单向转动,转动方向与轮1的相同;②在作单向不等速转动期间会出现一次瞬时停歇现象;③在作单向不等速转动期间会出现两次瞬时停歇,并在这两次瞬时停歇期间作反向转动,即出现倒转现象。显然,运动规律②是其它两种运动规律的临界状态[5]。理论分析表明,这3种运动规律与参数的选取有关。在z1=z3的前提下,当l1×l4<r1×l2时,从动轮3按运动规律①运动;当l1×l4=r1×l2时,按运动规律②运动;当l1×l4>r1×l2时,按运动规律③运动[6]。
为满足食品包装机械对间歇瞬时停歇的要求:①所设计的参数应使机构按运动规律③运动;②对于其中的四杆机构,根据曲柄存在条件应使l1+l4 ≤l2 +l3,即l1≤(r1+r2)-l4。这里将l4设计成四杆机构中的最长杆,是考虑到,实际机构l1的可调范围有限,所以l4尽量取值大一些。另外,l4的长度还应保证齿轮1和齿轮3的齿顶不相撞,即:

式中:
m—— 齿轮的模数。
2 创建三齿轮连杆机构虚拟样机及运动仿真
由于轮3的运动规律复杂,通过理论计算或编写计算程序来获取,实现起来有一定难度[7,8]。而应用Solidworks motion模块对创建的机构虚拟样机进行运动仿真,可以方便地得到机构的各种运动参数,如速度、加速度、位移等[9]。
根据上述的机构参数设定原则,将各参数取值如下:z1=z3=20,z2=30,m =2,l2=l3=r1+r2=20+30=50mm,l1=15mm,l4=80mm。根据这些参数,对各零件进行造型并把它们装配在一起,获得虚拟样机,如图2所示。为保证运动仿真的真实性,装配时通过添加配合映射而成的转动副和齿轮副应与实际机构一致。转动副和齿轮副的建立方法可参阅文献[10]。

图2 三齿轮连杆机构虚拟样机Figure 2 Virtual prototype of the three gear linkage mechanism
给齿轮1添加旋转马达驱动,设置转速为10r/min及仿真时间为15s,进行仿真。图3~5分别为仿真得到的轮3的角速度、角位移和角加速度。由图3和图4可知,轮3按运动规律③运动。图5表明,轮3的角加速度呈连续变化,故机构在整个运动过程中,不会存在柔性冲击,运转平稳,这是其它一些常用间隙运动机构如槽轮机构不能比拟的。
3 曲柄尺寸的影响
如上所述,当机构的参数基本确定后,主要是通过微调曲柄的长度来调整轮3 的运动规律,使之满足实际工作要求。因此,快速且精确地获得曲柄尺寸变化对机构运动规律影响的数据,对指导机构设计和具体应用是十分有益的。

图3 轮3的角速度随时间的变化Figure 3 The angular velocity of round three changing with time
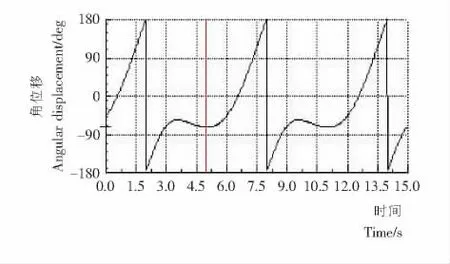
图4 轮3的角位移随时间的变化Figure 4 The angular displacement of round three changing with time

图5 轮3的角加速度随时间的变化Figure 5 The angle acceleration of round three changing with time
Solidworks造型的最大特点就是尺寸驱动,零件和装配体相互关联,为一有机整体。所以,分析曲柄长度的影响时,只需对曲柄零件的长度进行修改即可,不需要重新造型和装配,因为先前建好的装配体在重新打开时会自动更新,这时新建运动算例就可对已修改了曲柄长度的机构再次进行仿真。通过将仿真结果输出到Excel电子表格,以便进行更为精确的定量分析。分析结果见表1。

表1 曲柄尺寸变化对机构运动规律影响Table 1 The influence of crank dimensions change to motion rule of mechanism
由表1可知,在其它参数不变的情况下,稍微改变曲柄的长度,轮3的运动规律影响就会发生很大变化。当曲柄的长度接近12mm 时,轮3按运动规律②运动;当曲柄的长度小于该值时,轮3按运动规律①运动;当曲柄的长度大于该值时,轮3按运动规律③运动。当按运动规律③运动时,随着曲柄长度的增加,轮3逆向转动角度即倒转角会有很大增加,且开始发生逆转的时间提前。
将机架尺寸l4减到70mm 后,再变化曲柄的长度,进行运动仿真,机构同样也可得到上述3种运动规律。但是曲柄的长度改变量要大一些,这会增加实际机构实现的难度。
由于运动副中存在间隙,构件受力会有弹性变形以及运动中存在摩擦等原因,实际机构轮3的倒转角会小于仿真值即Δθ3。对于作短暂停歇的应用场合,倒转角的大小无疑是机构的一个重要特性参数,过大或过小均会影响设备的正常工作。过大,则从动轮实际上会出现明显的倒转,不符合停歇的要求,而过小,则相应停歇时间也会过短,难以保证工作需要。因此,设计时在保证轮3实际不发生倒转的前提下,停歇时间应尽量长。仿真结果表明,只要机构的参数设计恰当,是可以通过微调曲柄的长度来实现停歇时间调整的。
4 结语
利用Solidworks的Motion插件对建立的齿轮连杆机构虚拟样机进行运动仿真,可以快速获得输出轮的位移、角速度和角加速度。结果表明,通过改变曲柄的长度,会使机构的运动规律发生变化。据此,来确定机构的尺度参数,使之实现只需通过微调曲柄的长度,就可以调整停歇时间的长短,从而满足设备的预期要求。
1 方玉莹,左言言.包装机械中典型机构的分析研究[J].轻工机械,2004(1):54~56.
2 赵美宁.齿轮连杆机构在雪糕包装机中的应用[J].轻工机械,1998(1):37~40.
3 应瑞森.三轮四杆机构的简化设计[J].包装与食品机械,1992(2):21~24.
4 吕传毅,曹惟庆,褚金奎.齿轮连杆机构类型综合的研究[J].机械工程学报,1996(3):9~14.
5 叶仲和.三齿轮连杆机构的简易实用设计方法[J].包装与食品机械,1990(Z1):33~36.
6 伍利群.齿轮连杆机构在卷带供送中的应用及运动分析[J].轻工机械,2004(2):52~54.
7 薛小雯.带停歇的齿轮-连杆组合机构的设计及运动仿真[J].机械设计与制造,2008(7):19~21.
8 高晓红,褚金奎,郭晓宁.齿轮连杆机构力分析与运动仿真[J].西安理工学报,2002(3):289~294.
9 陈赛克,凌轩.基于Solidworks的齿轮五杆机构运动仿真[J].机械,2012(2):33~35.
10 陈赛克,凌轩.基于Solidworks双重周转轮系的运动仿真[J].机械研究与应用,2012(5):1~2.
猜你喜欢
内燃机工程(2021年6期)2021-12-10
机械工程师(2021年4期)2021-04-19
液压与气动(2020年4期)2020-04-10
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
设备管理与维修(2019年22期)2019-12-19
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
制造技术与机床(2017年3期)2017-06-23
河南科技(2014年6期)2014-02-27