
模糊PD与PI控制切换的航线跟踪算法
2012-04-13 09:20贾宝柱曹辉马捷任光
哈尔滨工程大学学报 2012年5期
贾宝柱,曹辉,马捷,任光
(1.上海交通大学 船舶与海洋工程国家实验室,上海 200030;2.大连海事大学 轮机工程学院,辽宁 大连 116026)
航线跟踪与船舶的经济性和安全性密切相关,理想算法应在不同操控模式及环境条件下均能以最小偏差跟踪设定航线.近年来,自适应模糊控制[1-2]、神经网络控制[3]等自适应控制方法研究直航线跟踪问题.由于变航向对船舶控制特性影响较大,小尺度内自适应控制算法难以获得理想的控制效果.多模型切换可以实现大范围内的自适应控制,有利于综合多种控制算法的优势,从而克服环境或操作模式改变对船舶控制精度的影响.
切换规则和稳定性是多模型控制研究的重要问题.已有文献提出的稳定性设计方法均是在Lyapunov稳定意义下求得[4-6].Tanaka等[4]采用T-S模糊规则构建切换律,并在此框架下证明了闭环稳定条件;文献[7]给出了严格反馈形式下非线性随机切换系统的全局一致渐进稳定控制器设计方法;文献[8]研究了时滞系统的指数稳定控制器设计问题.PID控制较早用于船舶自动舵,采用切换方式设计复合PID控制结构能够综合考虑动态系统的动态与静态性能指标[9].根据复杂航线跟踪过程不同时域内控制目标,本文提出一种模糊PD与常规PI切换的复合PID控制方法.采用劳斯-赫尔维茨稳定性判据求解闭环系统控制器参数条件,降低了设计难度,并将该方法用于船舶自动导航过程的多控制器切换控制中,得到了较优的数值仿真结果.
1 复杂航迹跟踪控制
1.1 航程的模糊分化
航线规划要综合考虑出发地至目的地之间的海洋环境、航行安全及运营经济性等因素,一般由多个直航线段首尾相接构成.相邻2个直航线段的连接点称为拐点.图1中假设规划航线为A→B→C→D,在A→B、B→C、C→D直航线段内航向不变,控制器根据由于风、浪、流等外界扰动所造成的航迹偏差大小,结合控制算法给出操舵指令来消除外界扰动,称之为航迹保持.转向点B、C处因设定航向变化,控制器输出较大的转舵指令使船舶快速转向至新的航向,称这一过程为航向改变.由A到D的全程自动导航要求控制器既要有直航线下的航迹保持功能,也要能够完成变航向时的自适应控制.2种过程控制目标不同,航迹保持模式下需要消除因外界扰动引起的运动轨迹偏差,由于这个偏差通常较小且波动频繁,因此控制器输出相应较小的控制作用.航程中大部分时间控制器工作在航迹保持模式,也称之为稳态工作域.在拐点处,设定航向发生改变,控制目标转变为快速减小航向偏差,并迅速稳定在设定航向上.此时控制器输出较大,过程持续时间相对较短,称之为瞬态工作域[5].

图1 航线规划Fig.1 Route planning diagram
工作域可依据线性化条件的有效性、模型的假设条件、稳定性能指标、实验约束条件等进行划分.根据以上实际控制过程的分析可以看出,控制器输出可以间接反应出其工作模式,设以船舶右转向时的舵角变化方向为正向,采用3个模糊集NE、ZE和 PE对舵角δ进行模糊工作域划分,如图2所示.
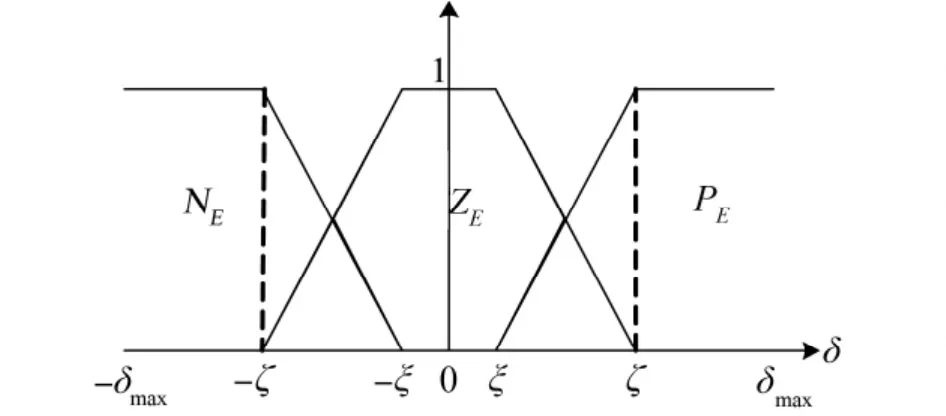
图2 工作域模糊分化Fig.2 Operating regime fuzzy partition
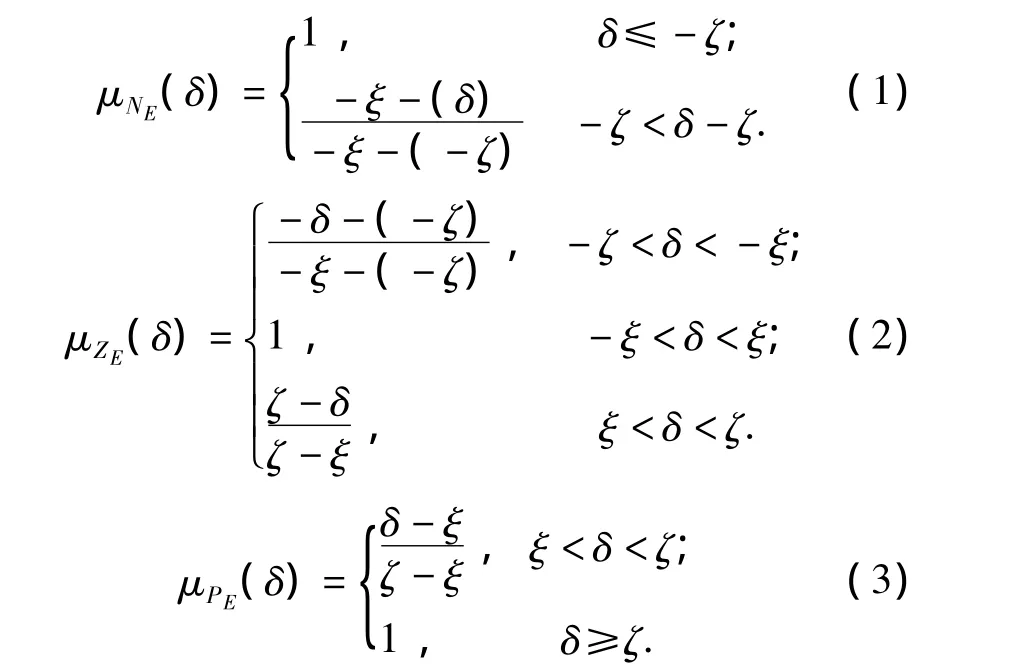
其中,ZE为舵角为“0”的模糊集,该模糊集为稳态工作域,NE、PE分别为船舶在拐点处左转向与右转向时舵角所对应的工作域.ZE、NE与PE均关于原点对称.由于采用了标准模糊分化,假设图中|z-x|=2e,则确定了ε就可以间接地确定ζ与ξ,从而确定了模糊工作域分化的隶属度函数形式.各工作域内模糊隶属度函数计算公式如下:
基于模糊工作域的多模型控制方法有利于切换过程的平滑性,并可保证全局控制输出的连续性.
1.2 闭环控制结构
典型的PID控制环节中超调量、过渡过程时间、稳态精度指标间存在相互制约,通常以多个控制指标的折中值作为最佳控制参数,特殊情况需强调某一性能指标时则以牺牲其他指标为代价.
根据不同工作域内性能要求,本文在瞬态工作域NE、PE内采用模糊比例微分控制器,在稳态工作域ZE选择比例积分控制器,2种控制作用根据工作域模糊切换规则进行切换.包含2个反馈的闭环控制系统结构,如图3所示.
整个控制系统包含3层反馈:1)转舵角度信号反馈至切换规则输入端,作为切换规则的前件变量决定控制器的工作模式;2)定位系统观测到的实际船位坐标值,反馈至输入端与根据设定航线的期望坐标值比较,得到船位偏差,此偏差经航迹控制环节转换为期望艏向角,与罗经测量到的实际船舶艏向角比较得到航向偏差,作为实际控制偏差输入至切换控制器; 3)舵角反馈作为模糊切换规则输入变量.
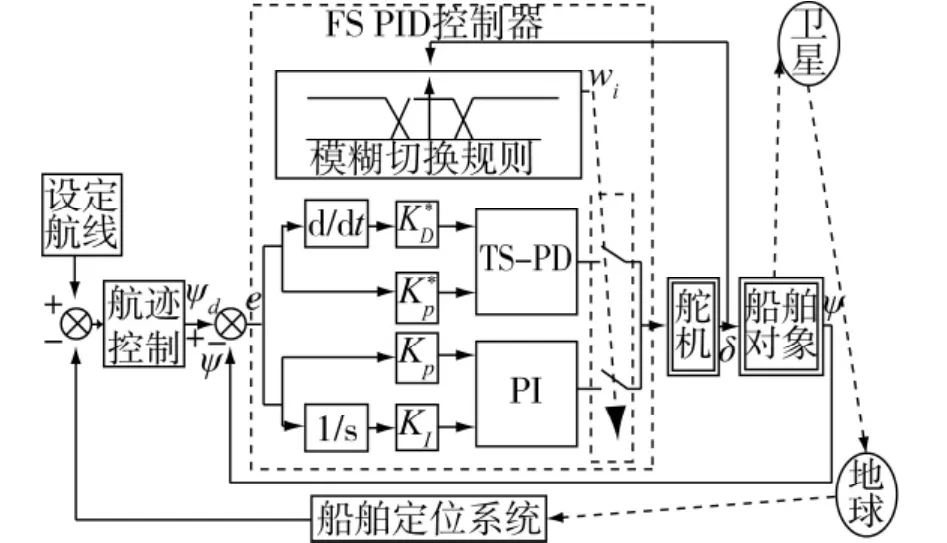
图3 控制系统结构Fig.3 Control system structure
2 控制算法
2.1 模糊推理规则
瞬态工作域内模糊PD控制器采用Takagi-Sugeno形式(简称为TS-PD).前件输入变量采用航向角度偏差e及其微分其中:

式中:ψ为船舶实际航向角,ψd为设计航向角.航行方向以沿北向顺时计算为正值,所有角度均采用弧度值表示.
TS-PD控制器模糊推理规则如下:

式中:Ai、Bj为航向偏差e及其微分的模糊集,二者采用相同的三角隶属函数形式(i,j=1,2,3),瞬态工作域中共有9条模糊规则,具体如图4所示.
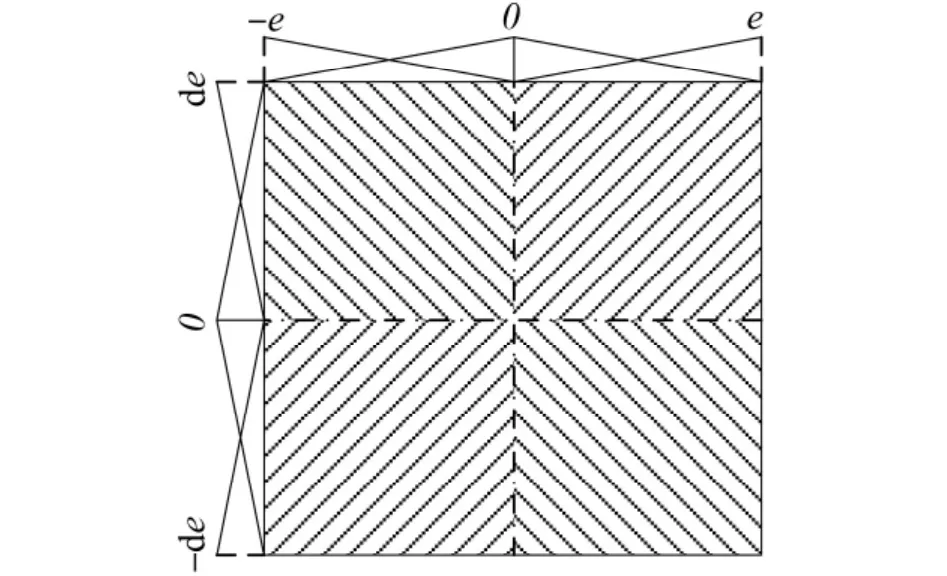
图4 e和˙e的模糊隶属函数Fig.4 The fuzzy membership function of e and˙e
瞬态局部控制器输出uT为

wij为第ij条模糊推理规则起动强度,且

可见在瞬态工作域内TS-PD控制器具有非线性变增益特性[7].
稳态工作域内偏差绝对值较小,采用常规PI控制方式进行无差控制.全局稳态控制精度不仅取决于常规PI控制器输出,而且与动态工作域内TS-PD控制器输出密切相关.稳态工作域ZE内常规PI控制器具有以下形式:

全局控制器模糊推理规则如下:瞬态工作域:If δ is NEor PEThen

稳态工作域:If δ is ZEThen

全局控制器输出为

其中,k=1,2,3分别表示模糊工作域NE,ZE,PE这3个模糊工作域,且:

将式(5)、(9)代入式(10)后得:
设
分别为全局控制器输出的非线性比例、积分、微分系数.则式(12)的传递函数形式为

2.2 仿真模型
仅考虑图3中航迹跟随环节中由航迹偏差输入至船舶艏向角的闭环系统框图如图5所示.
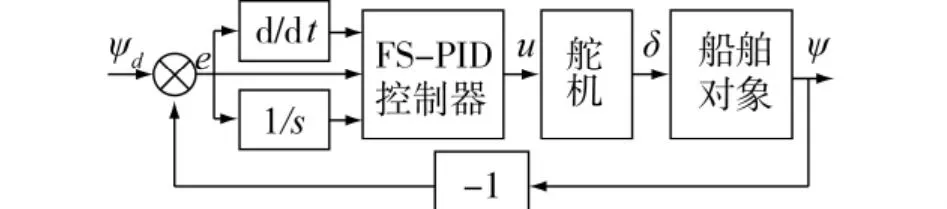
图5 闭环系统框图Fig.5 Block diagram of closed-loop system
船舶艏向角与舵角之间关系可用下式描述[10]:

式中:ψ为船舶艏向角,δ为舵角,k和τ是模型参数.在零初始状态下,式(17)可写作:

参数K,τ1,τ2,τ3均为船舶前进速度u和型长l的函数,具体关系如下:
舵机模型可写为

式中:kE为舵机增益系数,τE为舵机时间常数.包含舵机的被控对象传递函数变为

式中:K=kEk,为广义控制器的放大系数,对于大多数商船,对舵角及转舵角速度限定为最大舵角为±35°.
2.3 闭环稳定性
考虑由控制器(12)和广义对象(23)组成的闭环控制系统特征方程为

根据劳斯-赫尔维茨稳定性判据,系统稳定性条件为
对于某商船[10],K0=-3.86,τ10=5.66,τ20= 0.38,τ30=0.89,l=161 m,假设船舶沿纵向中心线方向航速为10 kn(约7.8m/s).式(23)中参数K=-0.187,τ=106.2.泵控型液压拨叉式舵机kE=1.4,τE=0.04s,经计算可知K=-0.26<0.
求解式(25)得到闭环控制系统稳定性条件为


2.4 对比仿真实验
设图2中x=3,z=5.在设定航向改变30°时,对本文所提出的模糊切换PID控制方法和模糊PID控制进行仿真对比实验,得到如图6、7所示的曲线.模糊PID控制采用9条规则的T-S模糊推理模型,系统推理规则.

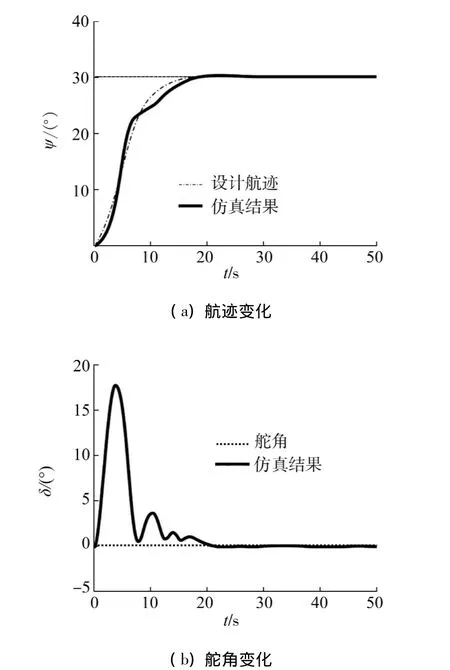
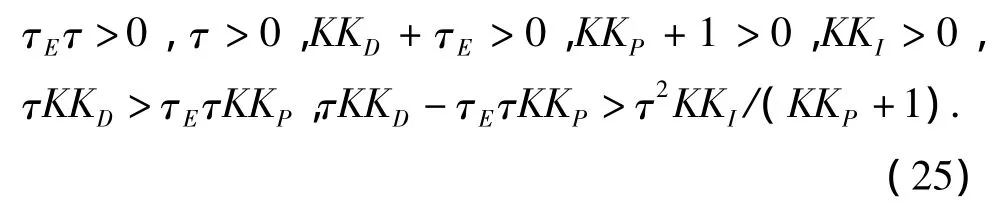
图6 航向改变30°时模糊PD+PI控制Fig.6 Fuzzy PD+PI control with 30°course-changing
由图可知,在相同转艏角时模糊切换PID控制船舶航迹超调量小(无超调),过渡过程时间短,且舵角动作幅度相对较小,可以有效降低转舵能量消耗.需要指出的是,模糊切换PID控制系统中工作域划分直接关系到控制性能,随着ZE工作域的减小稳定工作域范围变窄,全局控制器输出变化频繁,控制趋向敏感.由图中可以看出稳态工作域内PI控制方式可以保证航迹保持阶段的无差控制.
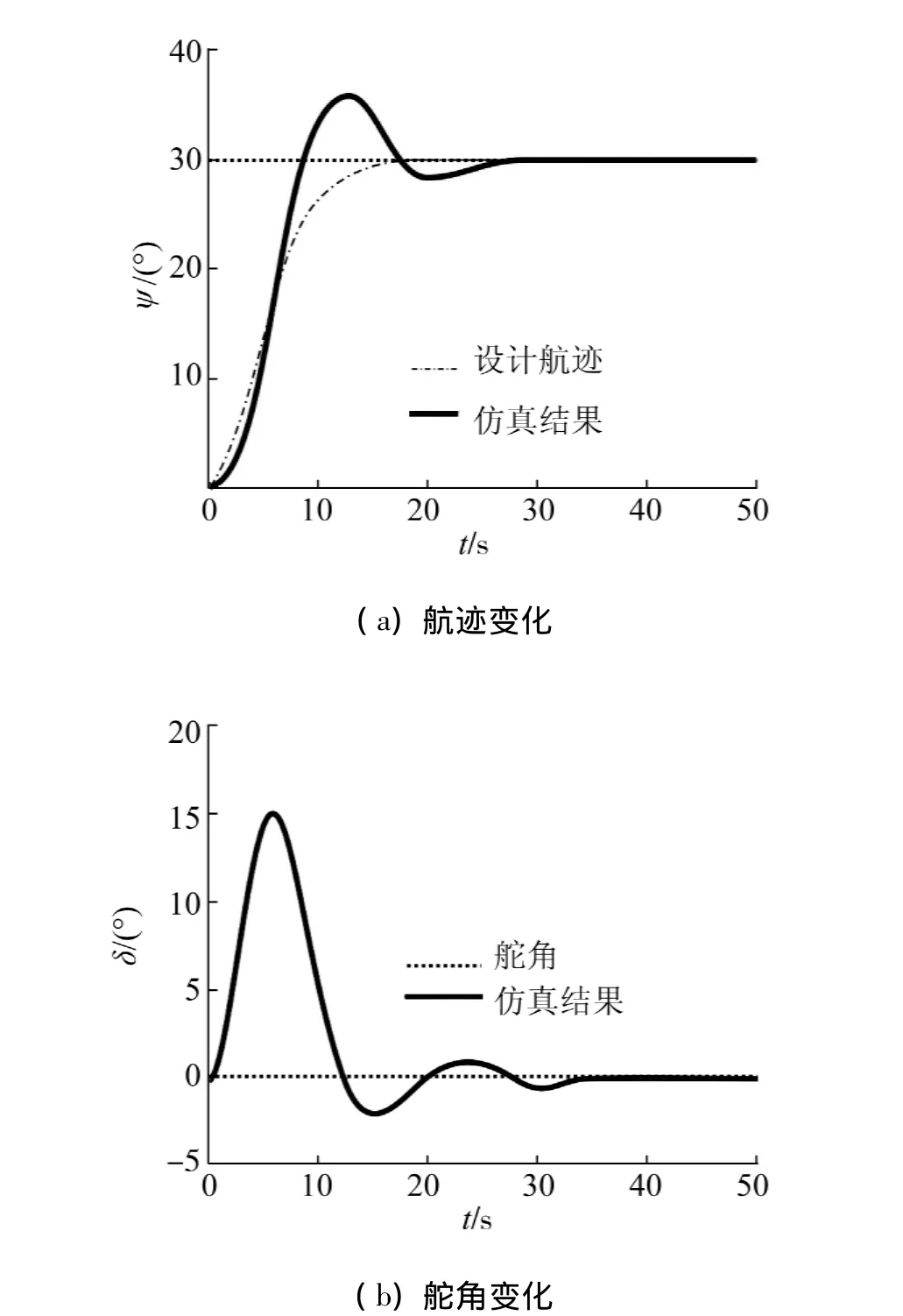
图7 航向改变30°时T-S PID控制Fig.7 T-S fuzzy PID control with 30°course-changing
3 结论
模糊工作域切换可以充分利用不同结构控制器构造适应不同操纵模式及环境条件的全局最优控制系统,满足多目标控制要求.本文提出的模糊PD与PI切换型船舶控制系统可以有效改善拐点处的控制性能,并在一定程度上保证直航线时的控制精度.其本质是一类变参数PID控制,但是较常规PID控制方法减少了模糊推理规则的数量,参数意义更加明确,容易调整及修正,且模糊切换方法改善了切换过程中的平滑性.
[1]RIGATOS G,SPYTOS T.Adaptive fuzzy control for the ship steering problem[J].Mechatronics,2006,16(8):479-489.
[2]VELAGIC J,VUKIC Z,OMERDIC E.Adaptive fuzzy ship autopilot for track-keeping[J].Control Engineering Practice,2003,11(4):433-443.
[3]张显库,吕晓菲,郭晨,等.船舶航向保持的鲁棒神经网络控制[J].船舶力学,2006,10(5):54-58.
ZHANG Xianku,LU Xiaofei,GUO Chen,et al.Robust neural network control for ship’s course-keeping[J].Journal of Ship Mechanics,2006,10(5):54-58.
[4]OHTAKE H,TANAKA K,WANG H O.Switching fuzzy controller design based on switching Lyapunov function for a class of nonlinear systems[J].IEEE Transactions on System,Man and Cybernetics,2006,36(1):13-22.
[5]JIA B Z,REN G,LONG G.Design and stability analysis of fuzzy switching PID controller[C]//Proc of 6th World Congress on Intelligent Control and Automation.Guangzhou,China,2006:3934-3938.
[6]NGUYEN T D,SΦRENSEN A J,QUEK S T.Multi-operational controller structure for station keeping and transit operations of marine vessels[J].IEEE Transactions on Control Systems Technology,2008,16(3):491-498.
[7]WU J L.Stabilizing controllers design for switched nonlinear systems in strict-feedback form[J].Automatica,2009,45 (4):1092-1096.
[8]VU N P.Switched controller design for stabilization of nonlinear hybrid systems with time-varying delays in state and control[J].Journal of the Franklin Institute,2010,347: 195-207.
[9]杨世勇,徐国林.模糊控制与PID控制的对比及其复合控制[J].自动化技术与应用,2011,30(11):21-25.
YANG Shiyong,XU Guolin.Comparison and composite of fuzzy control and PID control[J].Techniques of Automation and Applications,2011,30(11):21-25.
[10]LAYNE J R,PASSINO K M.Fuzzy model reference learning control for cargo ship steering[J].IEEE Control Systems Magazine,1993,13(6):23-34.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
江苏船舶(2021年4期)2021-09-28
舰船科学技术(2021年8期)2021-09-18
新世纪智能(高一语文)(2021年3期)2021-07-16
舰船电子工程(2020年4期)2020-06-19
青年歌声(2019年12期)2019-12-17
民用飞机设计与研究(2019年4期)2019-05-21
北京航空航天大学学报(2017年7期)2017-11-24
电子制作(2017年24期)2017-02-02
北京航空航天大学学报(2016年6期)2016-11-16
