
欠驱动水面船舶的非线性滑模轨迹跟踪控制
2012-04-13 09:21孟威郭晨孙富春刘杨
哈尔滨工程大学学报 2012年5期
孟威,郭晨,孙富春,2,刘杨
(1.大连海事大学 信息科学技术学院,辽宁 大连 116026;2.清华大学 智能技术与系统国家重点实验室,北京 100084; 3.大连交通大学 电气学院,辽宁 大连 116028)
由于欠驱动水面船舶控制问题的理论价值和工程意义已成为相关学者关注的热点[1];欠驱动水面船舶轨迹跟踪中给定的参考轨迹一般可以表示为时间的函数,即在指定时间到达指定位置[2];欠驱动船舶的轨迹跟踪控制对参考模型要求很高,控制器的设计也很复杂,具有一定的挑战性;文献[3]基于Lyapunov直接法和无源方法,为欠驱动船舶跟踪控制提出了2种建设性的解决方法;Ghommam等[4]提出了一种统一的反步设计方法,能够解决镇定和跟踪控制问题,所设计的轨迹跟踪控制器对环境干扰具有一定的鲁棒性;文献[5]基于backtepping技术设计了一种自适应控制方法实现了常值干扰下的欠驱动船舶位置的动态跟踪.Do和他的团队在欠驱动船舶的轨迹跟踪方面也做了很多工作[6].以上文献没有考虑欠驱动船舶的模型参数不确定性问题,而这又是实际应用中必然存在的问题.刘杨在文献[7]中针对存在模型不确定的欠驱动船舶轨迹跟踪控制问题,设计了一种自适应控制器.文献[8]设计了一种滑模控制器,并且通过船模试验进行验证.受以上文献的启发,针对模型中存在参数不确定和风、浪、流环境干扰的欠驱动船舶轨迹跟踪控制,提出了一种新型的非线性滑模控制律的设计方法.为解决船舶的欠驱动特性,分别引入了关于纵向跟踪误差的一阶滑动平面和关于横向跟踪误差的二阶滑动平面来设计控制律.
1 欠驱动水面船舶的数学模型
忽略水面船舶垂直方向的运动和沿纵向的旋转运动,欠驱动水面船舶的运动学模型和动力学模型[9]为
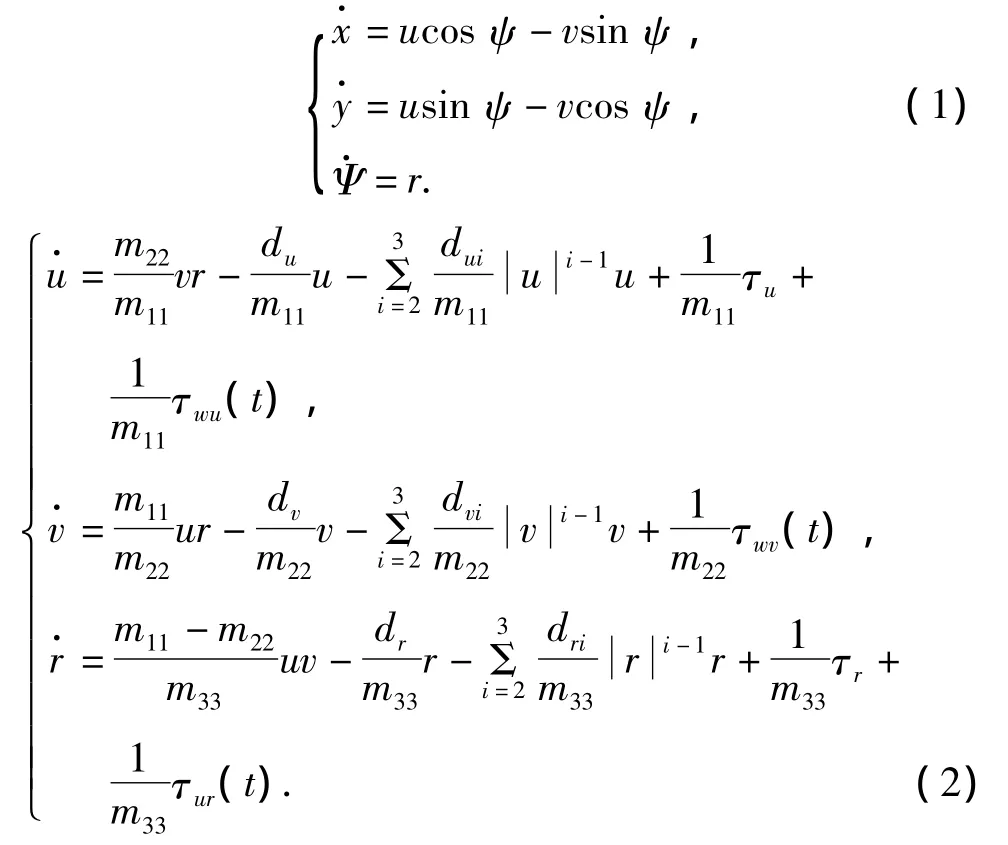
式中:x、y和ψ分别为船舶在地坐标下的纵向位置坐标、横向位置坐标和航向角;u、v和r分别表示船舶的纵向速度、横向速度和艏摇角速度;m11、m22和m33表示船舶固有质量和附加质量,为模型中不确定项;du、dv、dr、dui、dvi和dri(i=2,3)表示在前进、横向和转偏航角方向上的水动力阻尼,是不确定项,为了简便起见,忽略了高阶非线性阻尼项.τu和τr表示螺旋桨的纵向推进力和转船力矩;τwu(t)、τwu(t)和τwr(t)为外界风、浪和流引起的环境干扰,为有界时变项,并且满足τwvmax<∞和
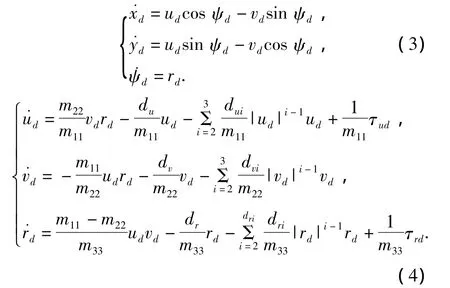
如下是一条虚拟欠驱动船舶[10]:
引入轨迹跟踪误差变量:

则轨迹跟踪误差动力学方程如下:
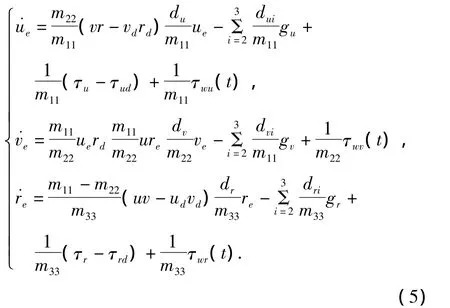
式中:

2 控制器设计
根据欠驱动水面船舶的固有特性,船舶在横向上是没有驱动的,在控制器设计时,首先设计纵向控制律τu,然后通过设计控制律τr间接控制船舶在横向上的运动,从而用2个控制输入实现船舶3个自由度的运动.
定义渐进稳态平面S,使系统的轨迹在有限时间内收敛到此平面,假设参考到达时间为treach,并且在平面上滑动以达到期望的目的[11-12],到达条件是定义Lyapunov方程:

使得:

式中:γi是一个恒定正值,决定了到达平面的快慢,到达时间为treach≤|Si|/γi.
2.1 纵向推进力τu的设计
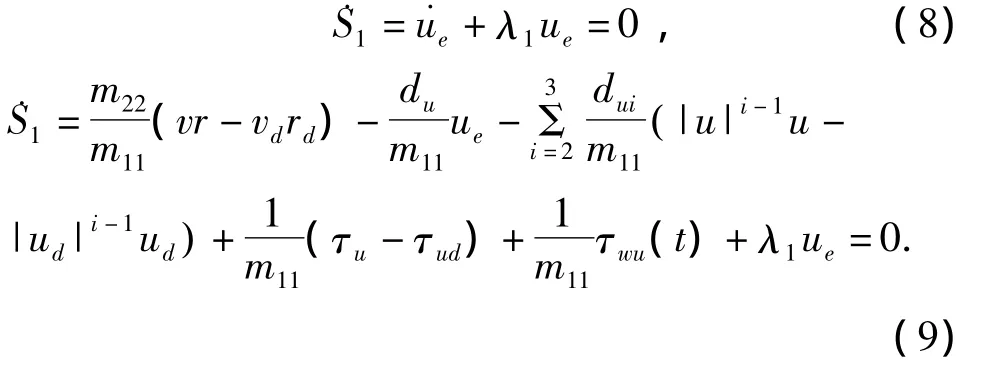
在设计时选取纵向轨迹跟踪误差ue,定义滑模渐进稳态平面为

对式(7)两边进行微分可得:
则取

式中:“^”表示模型参数的估计值,并且定义模型参数的边界为

采用饱和函数代替理想滑动模态中的符号函数来减轻抖振的影响,即
式中:Δ1为大于零的常数,其定义了一个在S1平面周围任意小的边界层.
则纵向控制律τu为

定义Lyapunov候选函数:

对上式两边进行微分,并把式(12)代入得:
由饱和函数(11)特性可知,如果取

则到达条件为

2.2 转船力矩的设计
选取横向轨迹跟踪误差ve,定义滑模平面S2为

上式两边进行微分得:

由轨迹跟踪误差动力学方程(5)可得:
令
则

令
则取

根据饱和函数(11),则转船力矩τr为

为了确定η2,定义Lyapunov函数:

根据饱和函数(11),为了能够保证在有限时间内到达{S2∈R,|S2/Δ2|≤1},如果取则到达条件为

3 稳定性分析
定理1 纵向推进力和转船力矩控制律如方程(12)、(25)所示,相对于由欠驱动虚拟船(3)、(4)产生的期望轨迹而言是一种渐进镇定轨迹跟踪控制器.
证明 欠驱动船舶的纵向和转船控制律是在到达条件(16)和(28)的基础上得到的,因此能够保证在有限时间内系统的轨迹能够分别到达定义的滑模平面(7)和(17).滑模平面S1和S2是渐进稳定的,因此系统的轨迹能够渐进滑动到原点,即

并且欠驱动船舶的运动学方程(1)能够确保轨迹跟踪在惯性坐标系下.证毕.
定理2 欠驱动水面船舶的转船运动在转船控制律(25)下是有界输入有界输出的(BIBO).
证明 定义Lyapunov候选函数

由式(2),并对其两边进行时间微分可得:

由式(32)可以看出,如果V3是减函数,则r也是减函数,又因为τr,u和v是有界的,所以r也是有界的[14].证毕.
4 仿真验证
对上述所设计的控制器进行仿真研究,从而验证其正确性和有效性.采用文献[15]中的船舶运动数学模型,此船长为32 m,质量为11 800 kg.参考轨迹由虚拟船产生,假设环境干扰为 τwu(t)= τwv(t)=τwr(t)=0.5+0.01sin(0.1t);取初始条件为:(x(0),y(0),ψ(0),u(0),v(0),r(0))=(0,200,1,0,0,0);控制参数取λ1=λ2=1.5,Δ1=Δ2= 0.03,γ1=γ2=0.6.
仿真结果如图1~3所示.图1表示为欠驱动船舶实际运行轨迹曲线x-y和参考轨迹曲线xd-yd,可以看出,由于参数不确定的影响,在初始阶段跟踪较慢,一段时间后能够很快跟上并且能够稳定地跟踪虚拟船舶产生的参考轨迹.图2表示欠驱动船舶各状态的跟踪误差曲线,初始阶段跟踪误差较大,但产生的跟踪误差也能稳定在一定的区域内,跟踪误差是一致最终有界的.图3表示控制输入曲线,由于模型参数不确定和受到风、浪、流时变干扰的影响,在开始阶段控制器的动作较快,甚至出现动荡,但最终趋于稳定.总之,从图1~3可以看出,所设计的控制器能够实现较好的跟踪.
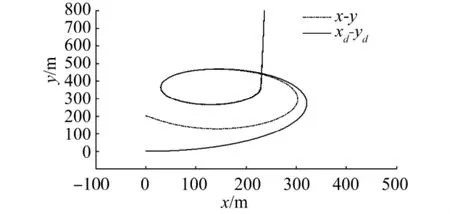
图1 欠驱动船舶的轨迹跟踪曲线Fig.1 Trajectory tracking of the underactuated ship
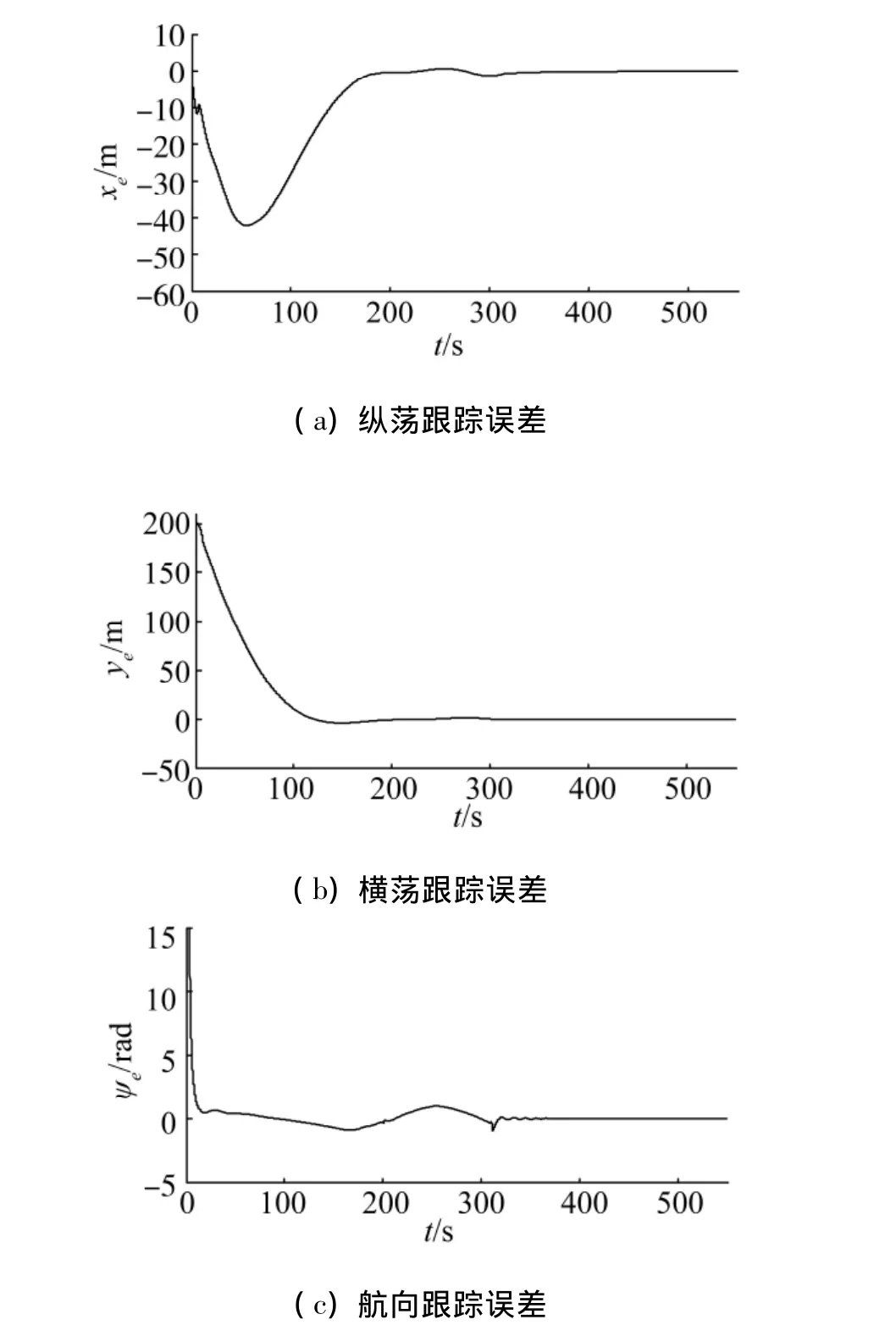
图2 欠驱动船舶各状态的跟踪误差曲线Fig.2 Stable tracking errors of the underactuated ship
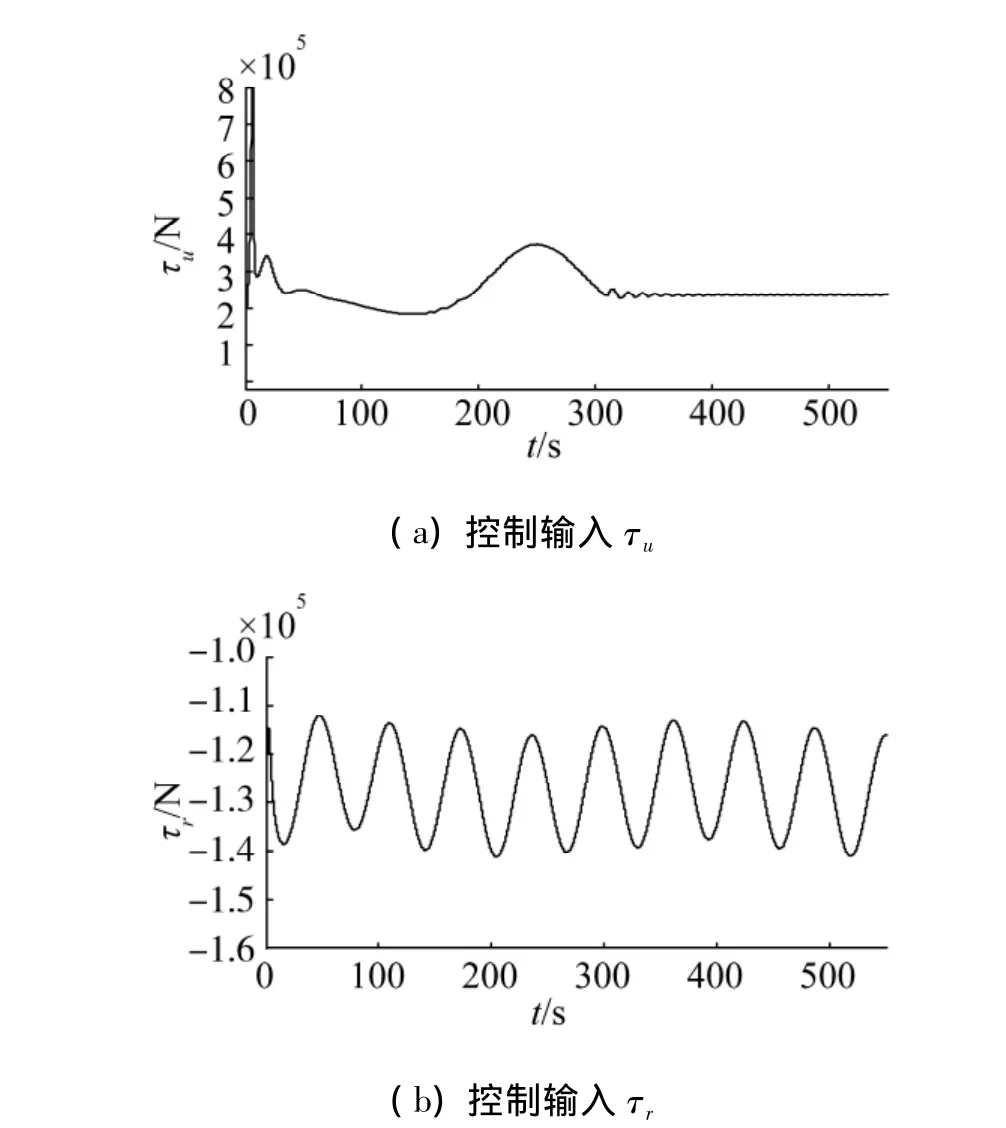
图3 船舶控制输入曲线Fig.3 Control inputs of the vessel
5 结论
1)本文研究了带模型参数不确定性的三自由度欠驱动水面船舶轨迹跟踪控制问题.针对船舶的欠驱动特性,设计时分别引入关于纵向跟踪误差的一阶滑动平面和关于横向跟踪误差的二阶滑动平面,提出了一种新型非线性积分滑模轨迹跟踪控制律.
2)所设计的控制器能够克服模型参数不确定带来的影响,对外界干扰具有鲁棒性,保证了较好的跟踪效果.有效抑制了滑模控制中产生的抖振,使控制输入变化不会太过频繁,保证了船舶航行的安全性和准确性,节省了能耗.因此,该方法具有一定的理论意义和应用价值.仿真结果验证了控制器的有效性.
3)设计上述控制器时,部分参数选择主要是根据经验得到的,因此在以后的研究工作中需要考虑选择合适的参数优化方法以得到更加准确的控制参数.结合编队控制策略,把本文设计方法推广到多船舶的编队控制问题,也是作者下一步主要的研究工作.
[1]郭晨,汪洋,孙富春,等.欠驱动水面船舶运动控制研究综述[J].控制与决策,2009,24(3):321-329.
GUO Chen,WANG Yang,SUN Fuchun,et al.Survey for motion control of underactuated surface vessels[J].Control and Decision,2009,24(3):321-329.
[2]LEFEBER E,PETTERSEN K Y,NIJMEIJER H.Tracking control of underactuated ship[J].IEEE Transactions on Control Systems Technology,2003,11(1):52-61.
[3]JIANG Z P.Global tracking control of underactuated ships by Lyapunov’s direct method[J].Automatica,2002,38 (2):301-309.
[4]GHOMMAM J,MNIF F,DERBEL N.Global stabilization and tracking control of underactuated surface vessels[J].IET Control Theory Application,2010,4(1):71-88.
[5]程金.水面船舶的非线性控制研究[D].北京:中国科学院自动化研究所,2007:1-95.
CHENG Jin.Nonlinear control of surface vessels[D].Beijing:Institute of Automation,Chinese Academy of Sciences,2007:1-95.
[6]DO K D,PAN J.Control of ships and underwater vehicles[M].Springer,2009.
[7]刘杨.欠驱动水面船舶的非线性自适应控制研究[D].大连:大连海事大学,2010:1-132.
LIU Yang.The nonlinear adaptive control for underactuated surface vessels[D].Dalian:Dalian Maritime University,2010:1-132.
[8]ASHRAFIUON H,MUSKE K R,MCNINCH L,et al.Sliding model tracking control of surface vessels[J].IEEE Transactions on Industrial Electronics,2008,55(11): 4004-4012.
[9]FOSSEN T I.Marine control systems[C]//Marine Cybernetics.Trondheim,Norway,2002.
[10]PETTERSEN K Y.Exponential stabilization of underactuated vehicles[D].Norwegian University of Science and Technology,1996:31-56.
[11]UTKIN V I.Variable structure systems with sliding-modes[J].IEEE Transactions on Automatic Control,1977,22 (2):212-222.
[12]刘金琨.滑模变结构控制MALAB仿真[M].北京:清华大学出版社,2005:22-64.
[13]KHALIL H K.Nonlinear systems[M].3rd ed.New Jersey:Prentice Hall,2002:409-426.
[14]YANG J M,KIM J H.Sliding mode control for trajectory tracking of nonholonomic wheeled mobile robots[J].IEEE Transactions on Robotics and Automation,1999,15(3): 578-587.
[15]DO K D,PAN J.Underactuated ships follow smooth paths with integral actions and without velocity measurements for feedback:theory and experiments[J].IEEE Transactions on Control Systems Technology,2006,14(2):308-322.
猜你喜欢
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
课外生活(小学1-3年级)(2020年2期)2020-03-09
中国惯性技术学报(2019年6期)2019-03-04
测控技术(2018年4期)2018-11-25
测控技术(2018年3期)2018-11-25
现代装饰(2018年5期)2018-05-26
摄影之友(影像视觉)(2017年8期)2017-11-27
中国三峡(2017年2期)2017-06-09
能源(2016年3期)2016-12-01
