
“育鲲”轮参数横摇的数值模拟及分析
2012-04-13 09:21苏作靖张显库
哈尔滨工程大学学报 2012年5期
苏作靖,张显库
(大连海事大学 航海动态仿真和控制实验室,辽宁 大连 116026)
参数横摇是阻尼较小的船在纵浪(顶浪或随浪)或接近纵浪的情况下,当遭遇一定频率的波浪时稳性变化较大,伴随着显著的纵摇、升沉运动在短时间内产生很大横摇角的现象[1].其研究始于20世纪30年代,当时人们主要对随浪中的参数横摇现象进行理论研究,直到1998年集装箱船“APL CHINA”号在迎浪中发生参数横摇事故,人们开始将研究重点从理论研究转向了对参数横摇实际发生情况及其数值模拟的研究.这起事故之后,国际拖曳水池委员会(ITTC)[2]、美国船级社(ABS)[3]分别给出了参数横摇的计算建议和评估指导,甚至国际海事组织(IMO)[4]也因此对其完整稳性规则(IS Code)进行重新评估,加入新的包括参数横摇的衡准.同时,参数横摇成为研究热点.国内,上海交通大学[5-6]、天津大学[7]、哈尔滨工程大学[8-9]和708研究所[10]等研究机构对参数横摇做了相关的理论计算和实验方面的研究,并编制有数值计算程序“PARR”.国外,France等[1]和 Francescutto[11]、Francescutto和 Bulian[12]、Palmquist和Nygren[13]、Neves和Pérez[14]分别对迎浪情况下的集装箱船、滚装船、汽车船和渔船参数横摇进行了研究,只是目前还没有哪种方法声称可以准确预报各种船型船舶的参数横摇.
“育鲲”轮[15]是我国花费巨资,第一艘自行开发设计、建造的专用教学科研实习船,肩负着振兴中国航海教育事业的重任,而且每年在其上实习的师生总数可达近千人,所以保障她的航行安全显得非常重要.本文将以特种用途船舶“育鲲”轮作为参数横摇的研究对象,使用ABS的参数横摇判定方法判定“育鲲”轮是否发生参数横摇,运用ITTC的参数横摇推荐方程数值模拟“育鲲”轮参数横摇,预报其横摇幅值并分析,用以保障“育鲲”轮航行安全.
1 ABS判定方法和ITTC推荐方程
ABS给出了一份详细的判定参数横摇是否发生的判定方法:
遭遇频率:

判定参数:

式中:ω表示波浪频率,ω0表示船舶横摇固有频率,ωm表示船舶横稳性高平均值频率,ωa表示船舶横稳性高幅值变化量频率,V表示船舶航速,μ表示线性阻尼系数.
船舶若要发生参数横摇,需满足以下不等式条件:

如不等式(1)不成立,船舶不会发生参数横摇.如不等式(1)成立,还需对阻尼条件进行判断:

其中:

如果k3>1,不满足船舶阻尼标准;如果k3<1,但是不等式(2)不成立,则船舶不会发生参数横摇.如果式(1)与式(2)同时成立,则船舶很有可能发生参数横摇.
当判定船舶可能发生参数横摇后,需要对其进行进一步分析和数值模拟,以期预报其横摇幅值.ITTC给出一个规则波中船舶在纵浪情况时的非线性船舶参数横摇方程:

计算方程中的横摇阻尼系数μ的最佳方法就是做船模横摇衰减实验,受条件所限,常常也使用经验公式求取,其精度也能满足一般工程要求,本文采用Ikeda[16]给出的半经验公式来估算:

其中:Bf是船体摩擦阻尼,Be是船体涡旋阻尼,Bw是船体兴波阻尼,BL是升力阻尼,BBK是舭龙骨阻尼.
等效阻尼估算中考虑了船速的影响,在式(4)中各成分都有相应估算表达式,详见文献[16].
为使结果更接近实际情况,还需考虑非线性阻尼的影响,非线性阻尼的常用表达式[8,17]:

横稳性高相对幅值h,在规则波中h是一个常数,在非规则波中,hcos(ωet)这一项就变成了随机变量,本文考虑规则波中的横稳性变化.计算波浪中复原力臂的变化方法有快速模拟法[18]、切片法[19]等.
本文采用切片法,其基于经典切片理论,重点考虑船-波相对位置影响,同时考虑垂荡和纵摇的影响,在复原力的计算中,不仅考虑了Froude-Krylov部分,还计及辐射力和衍射力部分,使得计算精度得到提高,详见文献[19].
对入射波压力沿船体湿表面进行积分可得复原力之Froude-Krylov部分GZFK,计算公式如式(6)所示:
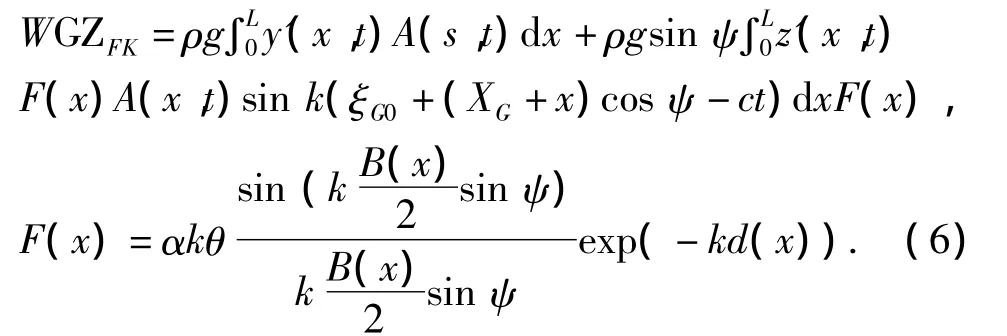
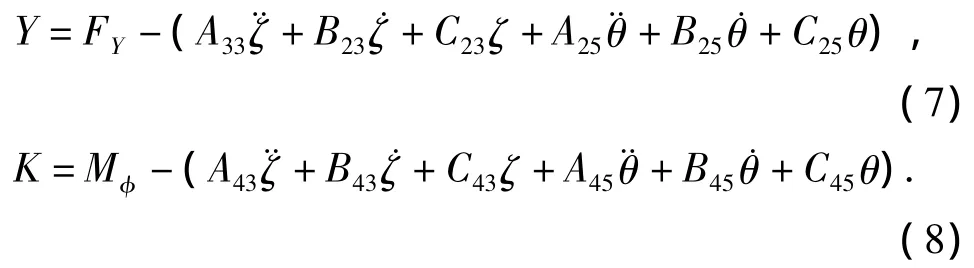
波浪中横荡方向辐射力和绕射力及横摇方向辐射力矩和绕射力矩公式如下:
计算波浪中复原力之辐射力和绕射力部分GZR&D的公式如下:
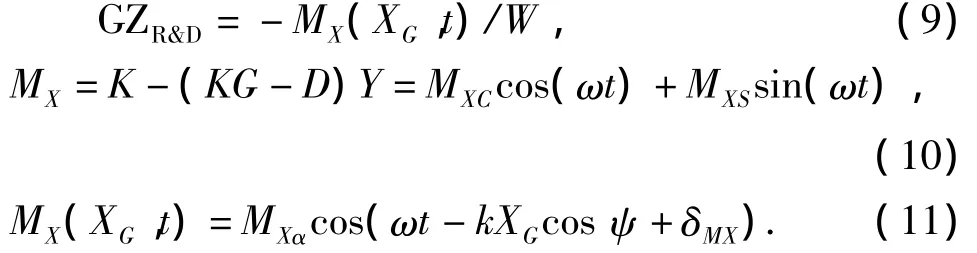
各系数表达式及参数意义详见文献[18].
假设在计算复原力之辐射力和绕射力部分时船舶横倾角度是10°且和波高成线性关系,动态的复原力之辐射力和绕射力部分看作与横倾角成线性关系.波浪中复原力臂GZ:

波浪中初稳性高GM:

2 “育鲲”轮实例分析
将上述方法运用于“育鲲”轮的参数横摇判定及预报.“育鲲”轮的主要参数参考表1,其三维船形如图1所示.
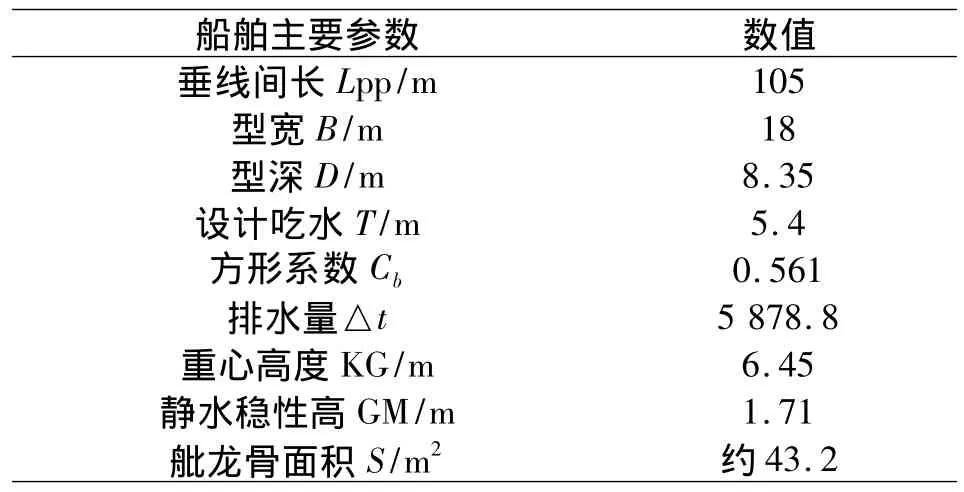
表1 “育鲲”轮主要参数Table 1 Principal particulars of vessel“YU KUN”
图1 “育鲲”轮船体三维图Fig.1 The ship body three-dimensional plot of vessel“YU KUN”
根据“育鲲”轮航行海区的海浪情况,设定波长等于船长,调整船速使遭遇频率为横摇固有频率两倍,利用切片法计算获取不同波高海浪下的GZ变化值,并利用ABS参数横摇判定方法判断“育鲲”轮是否发生参数横摇.表2为ABS参数横摇判定方法下不同波高情况的判定结果,图2为船舯位于波峰、波谷以及静水时的GZ曲线.
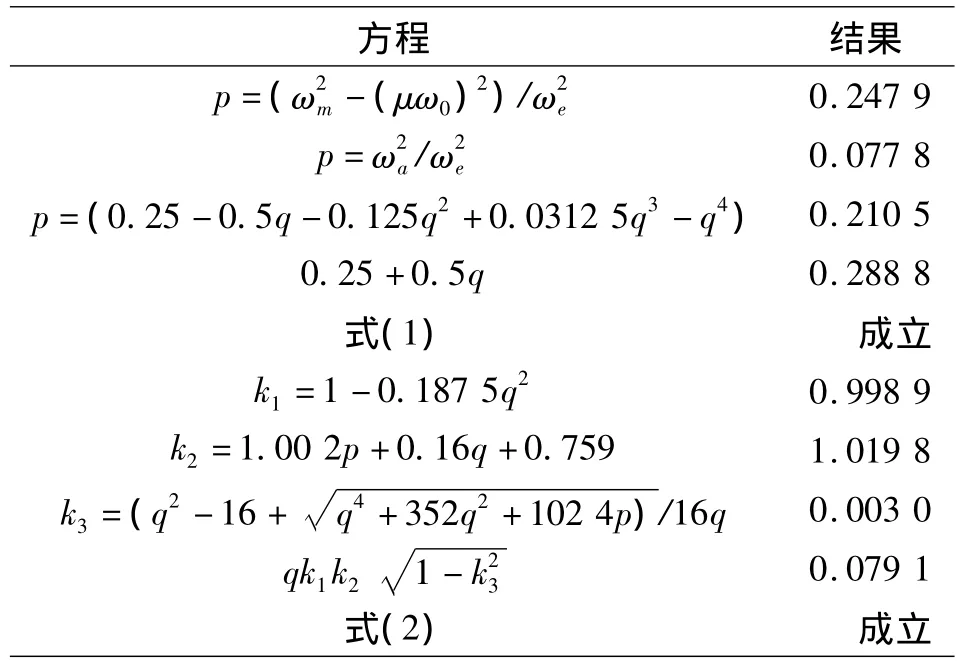
表2 参数横摇发生条件判定结果Table 2 The results of the judgment for parametric rolling
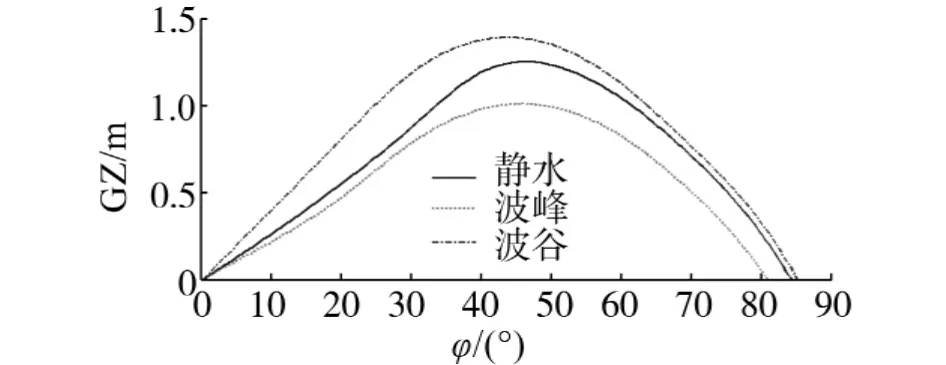
图2 船船在静水、波峰、波谷时的GZ曲线Fig.2 The GZ curves of ship in calm water,crest and trough
由图2可知,同静水中的GZ值相比,波峰位于船舯时GZ值变小,波谷位于船舯时GZ值变大.表2为据ABS所给判定方法计算的结果,可以知道,在波长λ=105 m,波陡Sw=0.04,设定阻尼系数μ= 0.1条件下,“育鲲”轮可能发生参数横摇.
根据“育鲲”轮的航行区域与相关海区的海浪资料[20-21],对其在实际航行条件的参数横摇进行仿真模拟.根据“育鲲”轮实际航行条件设计:固定λ/L=1,考察不同波陡Sw及航速V(影响遭遇频率)对参数横摇影响.
由图3可知,随着波陡增大,船舶横摇幅值随之增大,在极端海况下(Sw=0.08),“育鲲”轮横摇幅值可达到25°以上,此航行状态将危及船舶安全.
以15°为航行安全评估边界值,且Sw=0.04在“育鲲”轮的实际航行中较为常见,因此对Sw=0.04的海浪条件进一步分析,对不同遭遇频率与横摇固有频率比ωe/ω0的情况进行仿真对比.
由图4可知,参数横摇对于遭遇频率很敏感,ωe/ω0值对参数横摇的发生及幅值大小影响很大.当ωe/ω0值偏离2倍时,横摇幅值减小甚至参数横摇发生停止.为了更为清晰地反映波陡、遭遇波频与参数横摇之间的关系,在上述定性研究船舶参数横摇所得结论基础上,数值模拟记录几组不同波陡、不同频率下规则波引起的船舶参数横摇稳定的横摇幅值变化曲线.
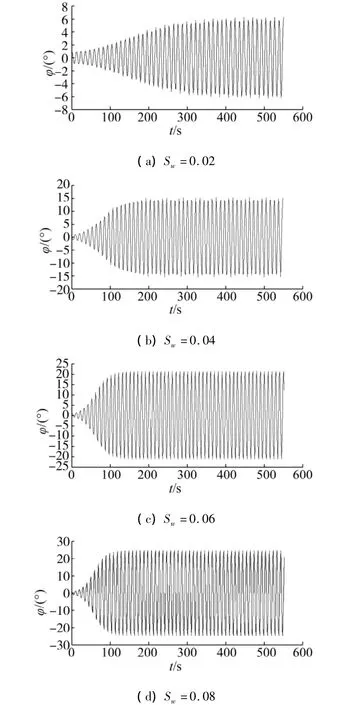
图3 不同波陡Sw的运动时历(ωe/ω0=2)Fig.3 Ship motion with time in different wave steepness Sw(ωe/ω0=2)
由图5可知,船舶遭遇频率与横摇固有频率之间的比值对参数横摇发生起着关键性作用,关键区域在ωe/ω0=2附近,而且随着Sw的增大,不仅使发生的区域增大,还会使横摇幅值增大,增大参数横摇的危险性.
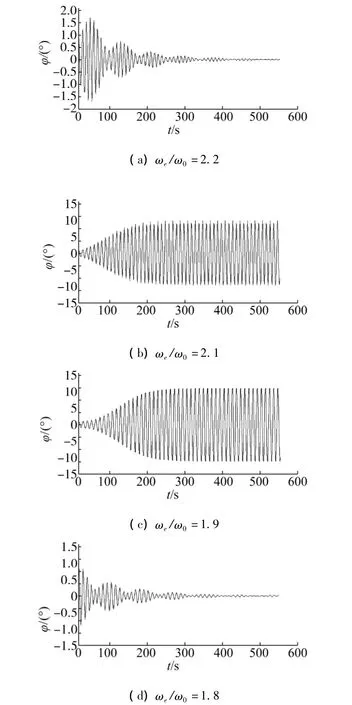
图4 不同ωe/ω0值的运动时历Fig.4 Ship motion with time in different ωe/ω0
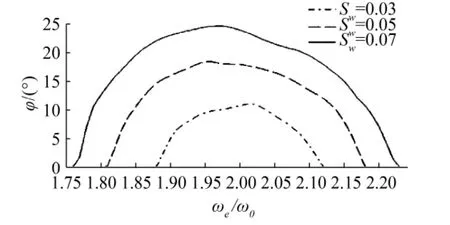
图5 不同波陡值Sw的稳态横摇幅值Fig.5 Steady roll angle with different wave steepness Sw
3 结束语
本文以参数横摇发生的4个条件对其进行数值模拟分析:横摇固有周期约为波浪遭遇周期两倍;波长近似船长;波高超过定值;横摇阻尼较小,为出发点,结合“育鲲”轮的实际航行条件.分析结果可知,“育鲲”轮在其实际航行条件下会发生参数横摇,其发生需要满足参数横摇发生的4个条件,且极端海况下横摇幅值可达25°以上,将会危及“育鲲”轮的航行安全,在一般海况下横摇幅值也可以达到5°~15°,虽然不会危及“育鲲”轮航行安全但会影响其乘员的航行舒适性.所以,参数横摇需引起“育鲲”轮驾驶员的警惕和重视,提前做好预防和避免的应对措施,以保障“育鲲”轮的航行安全.
[1]FRANCE W L,LEVADOU M,TREAKLE T W,et al.An investigation of head-sea parametric rolling and its influence on container lashing systems[J].Marine Technology,2003,40(1):1-19.
[2]ITTC——International Towing Tank Conference.Testing and Extrapolation Methods Loads and Responses,Stability Predicting the Occurrence and Magnitude of Parame-tric Rolling Revision[Z].Edinburg,2005:5-7.
[3]American Bureau of Shipping.Guide for the assessment of parametric roll resonance in the design of container carriers[R].Houston,2004.
[4]IMO.Revised guidance to the master for avoiding dangerous situations in adverse weather and sea conditions[Z].London,2007.
[5]付丽坤,蒋志鹏.纵向规则波中参数横摇的数值模拟[J].船海工程,2007,36(4):34-37.
FU Likun,JIANG Zhipeng.Numerical simulation of parametric rolling in longitudinal regular waves[J].Ship&O-cean Engineering,2007,36(4):34-37.
[6]FAN J,GU X,MIAO G,et al.Parametric rolling of a ship in longitudinal seas under random waves[C]//6th Osaka Colloquium on Seakeeping and Stability of Ships.Osaka,Japan,2008.
[7]唐友刚,李红霞,邝艳香.船舶参数激励非线性随机横摇运动分析[J].中国造船,2008,49(04):12-17.
TANG Yougang,LI Hongxia,KUANG Yanxiang.Analysis of the parametric excited ship rolling in longitudinal waves[J].shipbuilding of China,2008,49(4):12-17.
[8]丁勇,胡开业,邱敏芝,等.船舶非线性自由横摇运动的近似解析解[J].哈尔滨工程大学学报,2007,28(1): 45-48.
DING Yong,HU Kaiye,QIU Minzhi,et al.An approximate analytical solution for nonlinear free rolling of ships[J].Journal of Harbin Engineering University,2007,28(1): 45-48.
[9]金鸿章,张宏瀚.利用双水舱减摇系统预防船舶参数横摇研究[J].海洋工程,2010,28(3):97-101.
JIN Hongzhang,ZHANG Honghan.Research on doubletank stabilizers for the prevention of parametric rolling[J].The Ocean Engineering,2010,28(3):97-101.
[10]YANG S,FAN S,NIE J,et al.Experiment and numerical investigation on parametric rolling in regular head waves for large containership[C]//6th Osaka Colloquium on Seakeeping and Stability of Ships.Osaka,Japan,2008.
[11]FRANCESCUTTO A.An experimental investigation of parametric rolling in head waves[J].Journal of Offshore Mechanics and Arctic Engineering,2001,123(2):65-69.
[12]FRANCESCUTTO A,BULIAN G,LUGNI C.Nonlinear and stochastic aspects of parametric rolling modeling[C]//Proceedings of 6th International Workshop on Ship Stability,Webb Institute.New York,USA,2002:74-81.
[13]PALMQUIST M,NYGREN C.Recording of head-sea parametric rolling on a PCTC[R].Osaka:Technical Report,Intern-ational Maritime Organization,2004.
[14]NEVES M A S,PEREZ N A,LORCA O.Analysis of roll motion and stability of a fishing vessel in head seas[J].Ocean Engineering,2003,30(7):921-935.
[15]曹山林,林宣,施建华.远洋教学实习船“育鲲”号[J].船舶设计通讯,2009,1:3-7.
CAO Shanlin,LIN Xuan,SHI Jianhua.Training ship Yu Kun[J].Joural of Ship Design,2009,1:3-7.
[16]IKEDA Y.Roll damping of ships[C]//Proceedings of ship motions,wave loads and propulsive performance in a seaway.Osaka,Japan,1984:241-250.
[17]王新屏,张显库,关巍.舵鳍联合非线性数学模型的建立及仿真[J].中国航海,2009,32(4):58-64.
WANG Xinping,ZHANG Xianku,GUAN Wei.Nonlinear rudder/fin Joint mathematical modeling and simulation[J].Navigation of China,2009,32(4):58-64.
[18]HUA J B.Fast simulation of nonlinear GM-variation of a ship in irregular waves[J].Journal of Ship Mechanics,2000,4(3):25-35.
[19]鲁江,马坤,黄武刚.规则波中船舶复原力和参数横摇研究[J].海洋工程,2011,29(1):61-67.
LUJiang,MA Kun,HUANG Wugang.Research on roll restoring variation and parametric rolling in waves[J].The Ocean Engineering,2011,29(1):61-67.
[20]戴仰山,沈进威,宋竟正.船舶波浪载荷[M].北京:国防工业出版社,2007:7-22.
[21]张显库.船舶运动简捷鲁棒控制[M].北京:科学出版社,2012:17-26.
猜你喜欢
疯狂英语·新悦读(2022年8期)2022-09-20
学苑创造·A版(2022年4期)2022-06-18
疯狂英语·新读写(2021年6期)2021-08-05
陶瓷学报(2020年6期)2021-01-26
紫禁城(2020年8期)2020-09-09
当代陕西(2020年24期)2020-02-01
小哥白尼(趣味科学)(2018年12期)2018-12-18
中学生英语(2017年6期)2017-07-31
青年歌声(2017年6期)2017-03-13
中国航海(2014年1期)2014-05-09
