
基于机器人视觉的汽车零配件检测系统①
2012-09-27 14:26李天建
佳木斯大学学报(自然科学版) 2012年5期
李天建
(福建工程学院,福建 福州 350108)
0 引言
随着20世纪90年代以来光电、自动化和计算机图像处理技术的迅速发展,机器人视觉已在包括汽车制造业在内的很多工业部门得到越来越广泛的应用.在一些用于汽车制造业的专用设备,如刀具预调测量仪中,机器人视觉也已替代了传统的检测方式[1].
目前国内工业视觉系统尚处于概念导入期,各行业在解决了生产自动化的问题以后,已开始将目光转向视觉测量自动化方面[2].在国内汽车行业的应用中,如邦纳汽车视觉,主要应用于汽车密封条涂层视觉检测,汽车零部件漏装视觉检测和汽车零部件表面字符视觉检测[3]等.
本文通过对机器人视觉和汽车零配件生产工艺的研究,结合高斯滤波器、阈值分割、Canny算子等图像处理方法,提出一种新型的汽车零配件表面检测系统解决方案,并在西门子系列控制器和ifix组态软件上实现其功能,旨在提高零配件生产环节中的检测技术.
1 机器人视觉检测算法分析
1.1 视觉系统检测系统建模
目前,机器人视觉表面检测可分为2种方法:①用无缺陷模板与目标图像进行匹配,该方法适于具有确定几何构形的物体.②在一个滑动窗口中计算一组纹理特征,从整幅图像中寻找特征值的显著局部偏差;该方法的难点在于需要提取体现图像纹理信息的充足的纹理特征,而且用多特征向量表达的纹理维数很高,这就需要贝叶斯、最大似然、神经网络等复杂的分类器来比较模型特征和被检特征[4].根据汽车零配件生产的实际情况,采用模板匹配法不需要复杂的算法,可以缩短开发周期.
文中机器人视觉系统模型如图1所示,通过“培训”即对零配件建立一个较为完整的模板信息模型,将目标零配件的目标信息模型与模板信息模型进行匹配,根据不同的“匹配度”对零配件进行质量的判断和分级.
1.2 表面检测算法分析
为了获取检测对象的有效表面图像并进行识别,需要对目标图像进行一系列处理.其处理流程如图2所示.
(1)图像预处理:通过资料的查阅和实验结果对比,汽车零配件的表面图像中高斯噪声的频率最高,可使用二维高斯滤波器进行预处理.其中,二维高斯滤波公式可表示为:
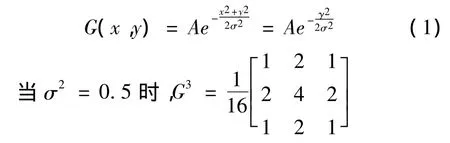
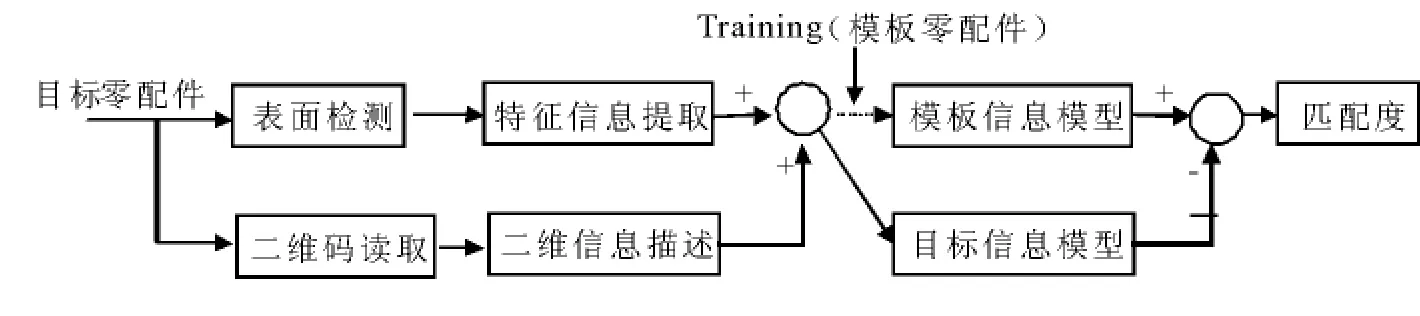
图1 视觉系统检测算法模型
实际上σ越大其作用域就越宽,平滑的力度就越大,其结果是图像越模糊.当σ2=0.5,系统可以得到3×3的滤波效果较好的模板.将含有噪声的图像与该模板做卷积后的结果作为后续处理的图像.
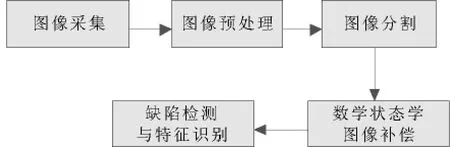
图2 图像处理流程图
(2)图像分割:图像分割采用阈值分割和边缘检测这两种技术.首先进行边缘检测以得到差分的灰度图来找出物体边缘,然后使用阈值分割二值化来突出图像中感兴趣的部分.文中采用Canny算子先对原图像进行高斯平滑处理,再进行微分操作得到梯度图,采用“非最大抑制”算法寻找图像中的可能边缘点,通过双门限值递归寻找图像边缘点,得到单像素宽度边缘图[5].其算法流程如图3所示.
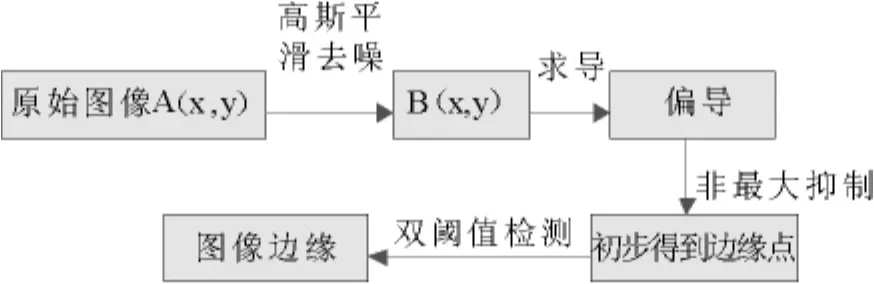
图3 Canny算子流程图
在零配件的图像分割中,除了获得有效边缘的信息外,还需进行图片中区域的信息.利用阈值分割技术确定图像中各像素点归属,获得对应的二值图像.阈值分割操作可以被定义为:

这个定义式表示当图像ROI内灰度在所设定的灰度值范围内,将所选区域全部点输送到输出区域S内.
(3)缺陷检测与特征识别:分块图像相减匹配检测法的实质是对小块像素区域进行图像相减模块匹配,其基本思想如下:将目标图像和模板图像划分成感兴趣区域(ROI,Region Of Interest)和不感兴趣区域,感兴趣区域分为N×N的区域块,不感兴趣区域不划分.检测过程中,无需对所有的像素全部加入匹配检测,只需对感兴趣区域进行操作.在感兴趣区,基于模板匹配法选定参考点,将对应子区域与数据库中相应模块图像相减匹配检测,进而根据子区域的相关系数来判断目标图像的图像质量是否相似.分块图像相减匹配检测法流程如图4所示:
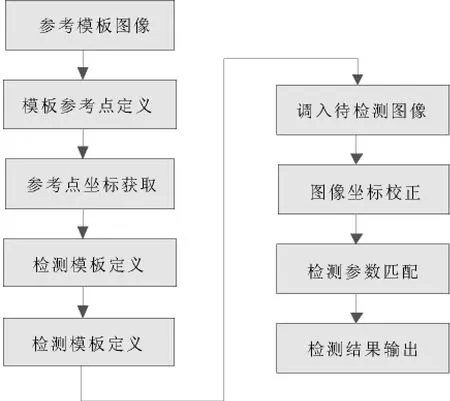
图4 分块图像相减匹配检测法流程
为了得到更准确的检测结果可用数学形态学方法对瑕疵边界缺损进行补偿.由于篇幅的限制,这里将不做介绍.
2 机器人视觉仿真系统设计
本文建立以西门子S7-300 PLC为控制核心、西门子视觉传感器VS120和VS130-2为主要检测单元的硬件平台,并通过Profinet、Profibus等总线与ifix组态软件开发的上位监控平台连接.由于篇幅的限制,下面简要介绍S7-300 PLC部分程序和ifix的组态界面的开发.
2.1 PLC控制程序设计
PLC程序的主体结构如图5所示.系统通过调用了FC1,FC2和FC3等功能来完成对视觉传感器VS120和VS130-2的控制、读取等操作,并实现零配件品质分级控制.其中,FC1为VS120的控制程序和零配件的分级程序,FC1中调用了作为图像处理算法程序的FB1功能块和保存控制字和状态字的DB1共享数据块,将图像处理的结果保存在DB10中,这个处理结果可以作为上位机组态分析和报表的重要数据.
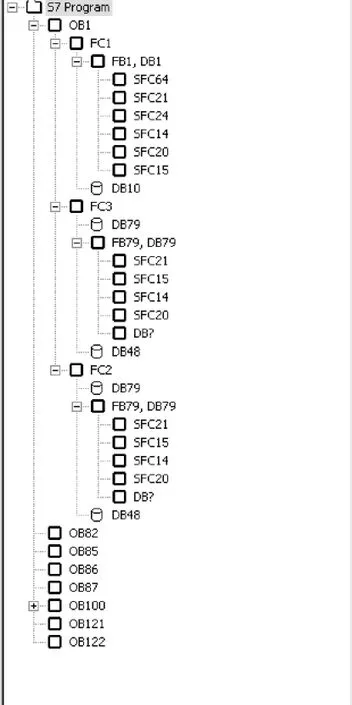
图5 视觉系统PLC程序主体结构图
本文使用了视觉传感器VS120可完成的3种功能中的“正确性判断”和“完整性判断”两种功能.系统将图像的处理程序封装在FB1功能块中可以使FC1方便的调用功能块.如图6所示,FB1块的I/O地址应与VS120硬件组态设置一致.因此要做如下设置:Ladder control和Ladder status都设为2,LADDER RECEIVE和LADDER SEND都设为280.同时我们分配了 M301.0-M301.7作为图像处理结果的输出,实现零配件的分级功能.
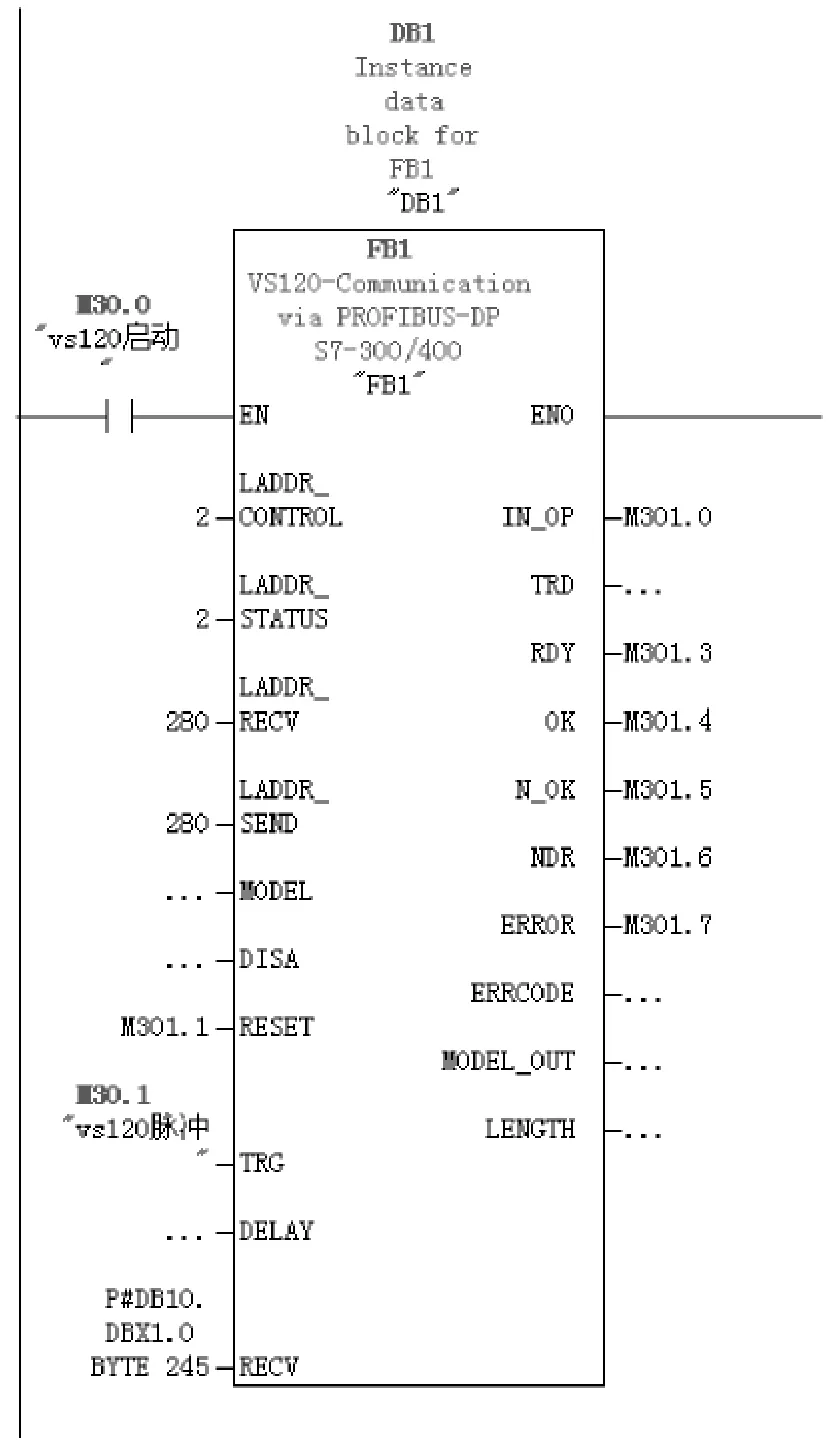
图6 FB1功能块图
系统可根据分析的结果进行自动分级.其具体流程分析如下:在VS120运行状态下,通过调整“TRG”管脚的变量M30.1的脉冲给定来完成的目标图像读取.如果目标图像符合样本中的图形,则在“OK”管脚M301.4处输出脉冲信号;如果不符合则在N_OK处M301.5输出脉冲,如图7所示.图中Q0.0为检测结果符合要求的零配件(合格品)的传输带电机,Q0.1为次品时的传输电机.且合格与不合格的数量将自动保存到MW22和MW34中,以便建立报表和绘制零配件的质量变化曲线.
2.2 ifix组态程序设计
ifix软件内置功能强大的VBA脚本编译器,能实现复杂工程对软件的要求.ADO组件集成在Visual Basic 6.0中,对于开发复杂系统的报表功能,采用ADO技术访问ifix历史数据库实现报表非常灵活[6].同时采用Excel自带的强大的函数和处理数据的能力,满足系统对报表的需求.
本文介绍的汽车零配件检测系统的历史报表设计流程如图8所示.
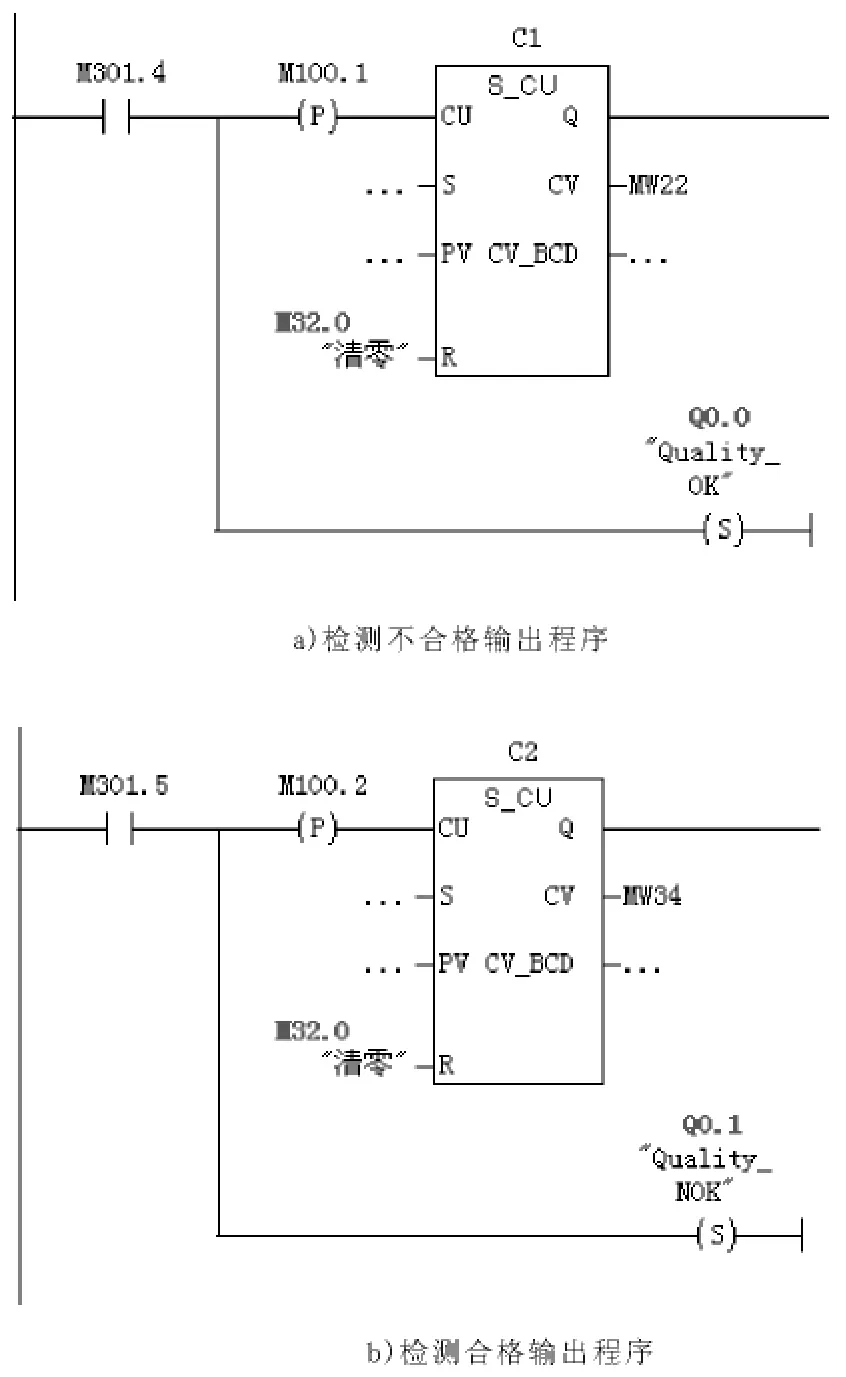
图7 零配件分级plc程序
其中,系统读写二维码信息和零件检测的报表程序编写(节选)如下:
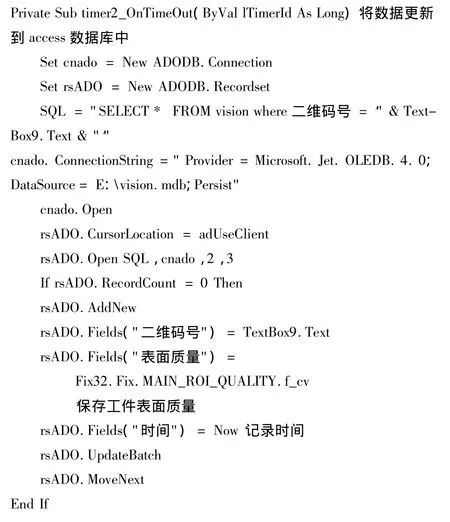
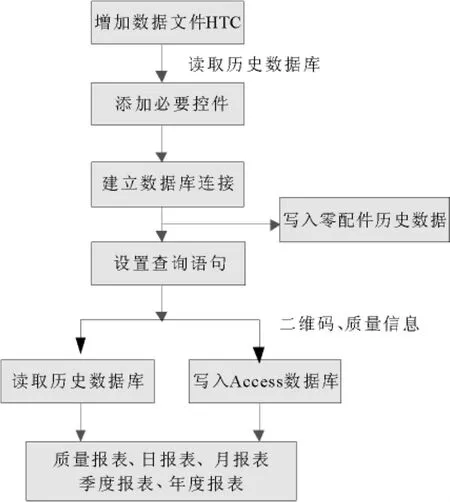
图8 汽车零配件报表设计流程
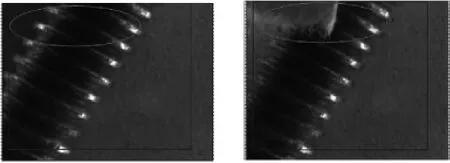
图9 零配件判别图
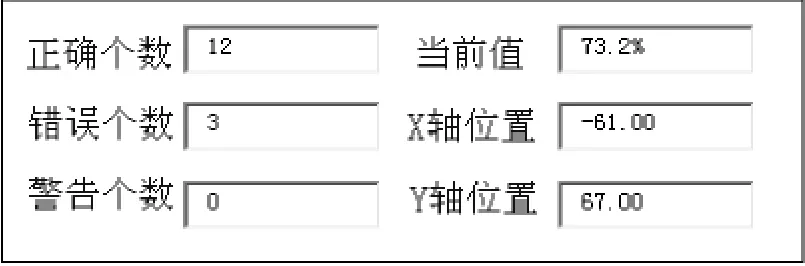
图10 IFIX界面显示
3 运行调试及其结果分析
3.1 机器人视觉仿真系统调试
文中设定方形边框目标检测的区域.经过处理后的零配件图像的数据如零配件偏转角度,XY轴方向上位置和目标零配件与目标零配件的匹配程度都可以ifix上显示,并可保存到历史数据库和Access数据库中.图9为完整的零配件模板和具有缺陷的零配件经过表面检测后的结果,这里假设被纸张掩盖的零配件为有缺陷的零配件.检测结果在ifix界面上显示相似度只有73.2%,若系统设定不合格产品的阈值为90%,则判定其不合格产品,判定结果如图10所示.
3.2 图像处理算子对最终结果的影响
文中选用的高斯滤波器、阈值分割、Canny边缘检测等算法都是基于分析各种相似功能的算子.主要影响因素有:①根据算子对零配件图像处理要求和特点的满足度大小来选择算子,应充分考虑各算子之间的衔接和匹配程度,这是影响最终的检测精度的一个关键因素.②平滑滤波器的选用直接影响Canny算法的结果.选择较小的滤波器产生的模糊效果也较少,可以检测较小、变化明显的细线.反之选择较大的滤波器所产生的模糊效果也较多.选用二维高斯滤波,其计算量随滤波模板宽度成线性增长而不是成平方增长,在一定程度上影响了滤波的质量.④在进行阈值分割时,不同的阈值会影响二值化的结果,导致后续处理的结果.⑤在使用分块图像相减法获取图像的过程中,由于零配件旋转、角度不一致等因素影响检测区域的寻找结果,对于M×N较大的模板,像素点之间的比较会产生跳跃情况,从而无法很好的获得目标图像的ROI.
4 结束语
本文主要针对汽车零配件材料材质多样、样式和功能复杂等特点,从图像处理的角度出发,结合机器人视觉系统技术和汽车零配件的检测工艺,使之满足工业生产要求.实验结果表明,该系统达到预期设计目标.
[1]山东重联.机器人技术在汽车制造行业中的应用[Z].重联车辆.
[2]王思为,朱明.基于DM642机器视觉系统的设计与实现[J].微计算机信息,2006:1-1.
[3]邦纳机器视觉在汽车行业的应用[EB/OL]http://www.autooo.net/autooo/yibiaoyiqi/news/2011 -05 -29/71849.html.
[4]温兆麟.机器视觉新技术在自动表面检测中的探讨[J].广州航海高等专科学校学报,2011,(4):28.
[5]陈宏申,李环.Canny边缘检测算法在机器人视觉中的应用[J].现代计算机(下半月版),2011,(11):18.
[6]中国百科网.基于ADO技术的IFIX历史报表的设计与实现[EB/OL]http://www.chinabaike.com/z/gyzd/493869.html.
猜你喜欢
装备制造技术(2021年5期)2021-08-14
制造技术与机床(2019年9期)2019-09-10
时代农机(2019年9期)2019-02-11
制造技术与机床(2018年12期)2018-12-23
西南交通大学学报(2018年6期)2018-12-18
电子制作(2018年18期)2018-11-14
精密制造与自动化(2018年1期)2018-04-12
河北遥感(2017年2期)2017-08-07
衡阳师范学院学报(2016年3期)2016-07-10
电气化铁道(2016年4期)2016-04-16
