基于Matlab/Simulink的锅炉汽包水位控制建模仿真
2012-11-08 00:53金璐,陈勇
淮阴师范学院学报(自然科学版) 2012年2期
金 璐, 陈 勇
(1.南京师范大学 电气与自动化工程学院, 江苏 南京 210042; 2.淮阴师范学院 物理与电子电气工程学院, 江苏 淮安 223300)
基于Matlab/Simulink的锅炉汽包水位控制建模仿真
金 璐1, 陈 勇2
(1.南京师范大学 电气与自动化工程学院, 江苏 南京 210042; 2.淮阴师范学院 物理与电子电气工程学院, 江苏 淮安 223300)
设计了一种新型的锅炉汽包水位模糊PID控制器,分析了锅炉汽包水位控制系统的数学模型和模糊PID控制器的结构、工作原理和作用,并运用Matlab/Simulink对模糊PID控制器和常规控制器分别在锅炉汽包水位控制中进行仿真. 结果表明,模糊PID控制器设计合理,控制效果良好,具有更好的控制特性.
Matlab; 模糊PID; 汽包水位
0 引言
锅炉是化工、石油、电力等工业部门的重要热源、能源动力设备[1],锅炉控制系统的水平已经成为衡量锅炉性能的一个重要因素.锅炉控制是一个比较复杂的控制过程,各个环节的工艺参数必须严格控制,而汽包水位控制系统是锅炉自动控制系统中最重要的环节,汽包水位是锅炉正常运行的重要参数,维持汽包水位在一定的范围内变化,是锅炉水位控制的重要任务之一.随着锅炉汽包水位的控制应用领域的不断扩大,要求控制系统设计简易、成本低廉、控制算法合理、开发周期短,建立锅炉汽包水位控制系统的仿真模型,可以充分利用计算机仿真的优越性,人为地改变系统的结构、加入不同的扰动和参数变化,以便考察系统在不同结构和不同工况下的动态特性[2].本文在分析锅炉汽包水位控制数学模型的基础上,对通常的运动控制系统仿真模型进行了改进,并借助于Matlab/Simulink强大的仿真建模能力,建立了锅炉汽包水位控制系统的计算机仿真模型.
1 系统基本原理
锅炉汽包中储水量的变化是由汽包水位决定的[3],在水位下汽泡容积的变化过程趋于平衡时,水位的逐渐上升反映了汽包中储水量的增加,因为给水温度比汽包内饱和水的温度低,当给水流量增加后,原有饱和水中的部分热量就被吸收,所以水位下汽泡容积有所减少.锅炉的给水流量实际反映了给水控制系统的操纵变量,可以把汽包水位看作单容量无自衡过程.
用传递函数G1表示锅炉汽包水位H与给水流量W之间关系,如果给水量为阶跃变化时,汽包水位在起始状态不会迅速增加,而是呈现出起始惯性段,此过程可近似于积分环节与时滞环节的串联系统特性,G1可表示为:
(1)
式中,S为拉普拉斯算子,T1为时间常数,k1为给水单位流量改变时锅炉水位变化速度.
用传递函数G2表示“虚假水位”时水位H与蒸汽流量D之间关系,所谓“虚假水位”,即蒸汽流量突然增加时,水位先上升,然后再下降,而不是当蒸汽流量D大于给水量W时,水位应下降,这是因为蒸汽用量增加,瞬间导致汽包压力下降的缘故.(反之,蒸汽流量突然减少时,则水位先下降,然后再上升),G2可表示为:
(2)
式中,S为拉普拉斯算子,T2为时间常数,k2为放大系数,kf为蒸汽单位流量改变时水位变化速度.
2 模糊PID控制器的数学模型
模糊PID参数自整定的设计思想是先找出PID三个参数与偏差e和偏差变化率ec之间的模糊关系[4],为使被控对象具有良好的动、静态性能,在系统控制过程中,通过不断检测偏差e和偏差变化率ec,在线校正参数Kp、Ki和Kd,从而满足不同偏差e和偏差变化率ec对控制器参数的不同要求.模糊PID控制器通过偏差e和偏差变化率ec作为输入,在线对PID参数进行校正,从而可以实现不同时刻偏差和偏差变化率对PID参数自整定的要求.
2.1 模糊PID控制器的组成
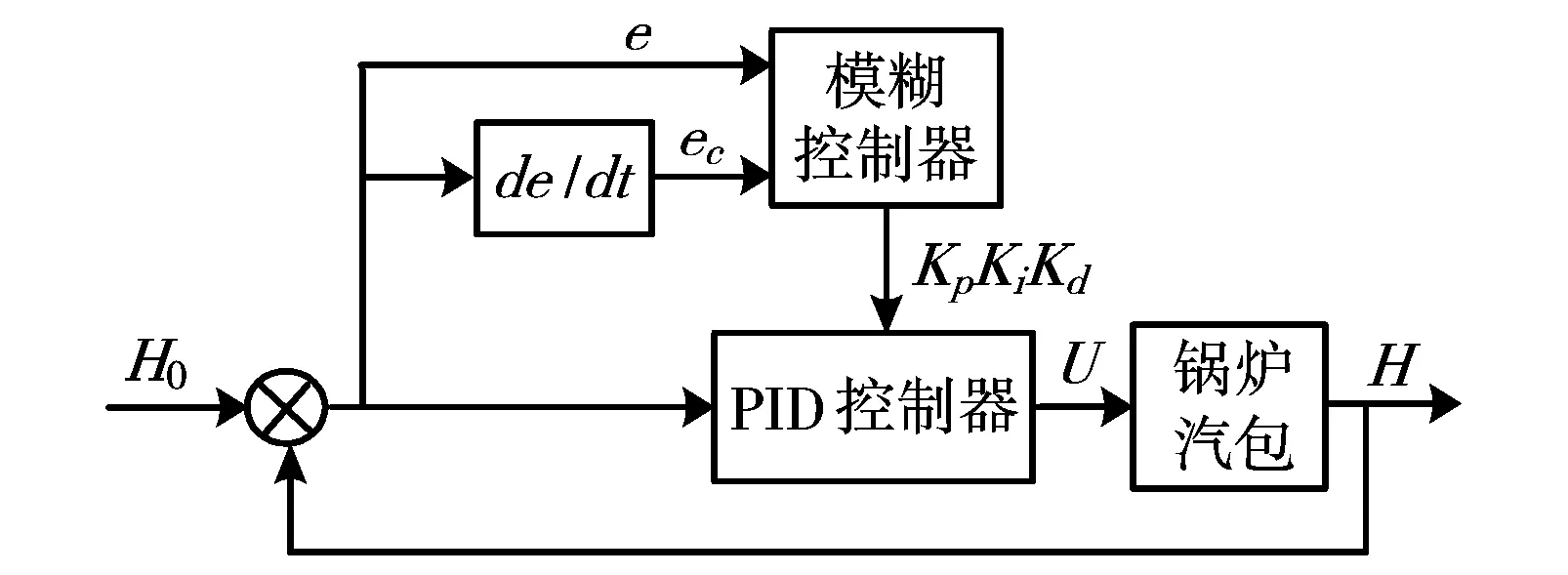
图1 汽包水位模糊PID控制器结构图
模糊PID锅炉汽包水位控制是运用模糊控制理论及传统PID控制理论来实现对锅炉汽包水位进行控制的装置[5],其基本组成如图1所示.
图1中H0为汽包水位的给定值,H为汽包水位的实际值.汽包水位模糊控制器采用双入单出结构.两个输入变量分别为:水位的偏差e和水位偏差的变化量ec.输出控制量U控制汽包水位调节阀的开度.
2.2 参数PID模糊控制规则
模糊PID控制器输入变量为e(系统给定值H0与实际输出值H之间的偏差)和(偏差变化率),经模糊控制器后输出语言变量E,偏差变化率Ec,不断校正PID参数KP,Ki和Kd.可以选取PB,PM,PS,ZO,NS,NM,NB作为偏差语言变量E,偏差e的离散论域为{-3,-2,-1,0,1,2,3},偏差E的隶属函数选用三角函数.选取PB,PM,PS,ZO,NS,NM,NB作为偏差变化率语言变量Ec,偏差变化率ec的离散论域为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3},偏差变化率的隶属函数也选三角形函数.根据PID控制的基本原理,比例系数KP的作用在于加快系统的响应速度,提高系统调节精度;积分系数Ki的作用在于消除系统的稳态误差;微分系数Kd的作用在于改善系统的动态特性.根据以上控制规则设计锅炉汽包水位控制回路的PID参数模糊控制规则表,如表1-表3所示.
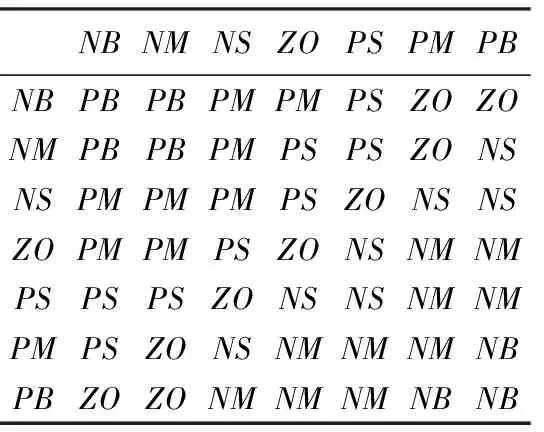
表1 KP的模糊控制表
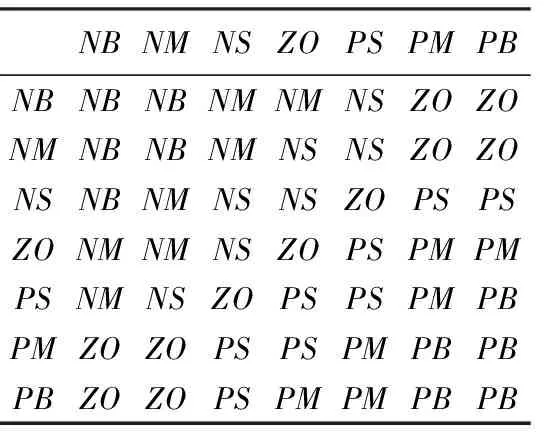
表2 Ki的模糊控制表
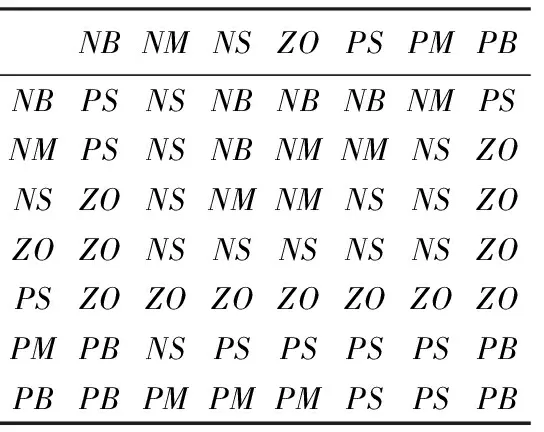
表3 Kd的模糊控制表
采用加权平均法进行反模糊化[4],将模糊推理结果转化为精确值.本文中通过模糊PID控制器,得到模糊控制量所对应的PID参数KP,Ki和Kd的控制增量ΔKP,ΔKi,ΔKd.最后,采用增量式的PID控制算法计算控制系统当前控制增量ΔUi,将ΔUi附加在前一时刻的控制量ΔUi-1上,即可得到当前时刻的输出控制量Ui.
3 仿真结果
在Matlab/Simulink中根据上文PID参数模糊控制规则对锅炉水位控制系统进行了仿真,结果如图3所示,为了方便比较对常规PID控制系统也进行了仿真,仿真曲线如图2所示,比较结果表明模糊PID控制器的超调量较小,稳态误差较小,响应速度快.
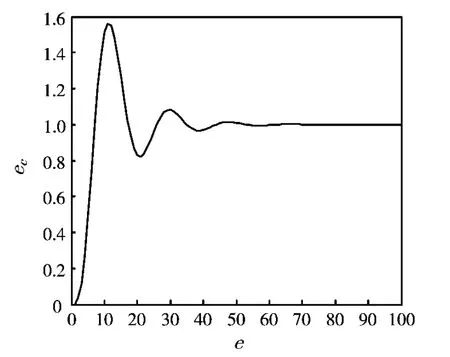
图2 常规PID控制曲线
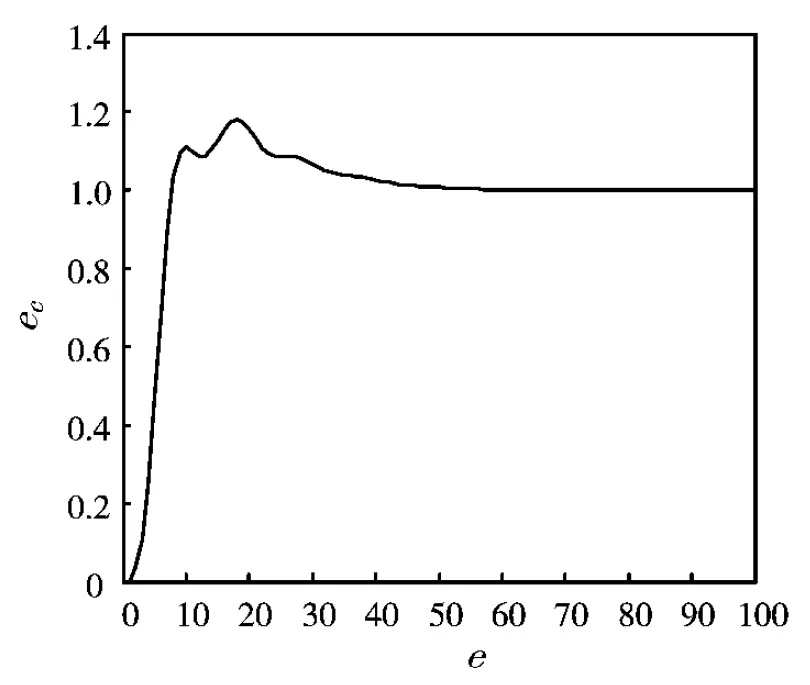
图3 模糊PID控制曲线
4 结论
本文锅炉汽包水位控制采用模糊PID控制原理,在线地对三个参数进行了调整.模糊PID控制器采用二维输入量,即偏差e和偏差变化ec,从仿真结果看,具有较好的控制性能,既达到了较快的响应速度,又抑制了超调量,达到了优化PID控制器和模糊控制器的目的,为锅炉汽包水位控制系统的设计提供了一定的参考价值.
[1] 马艳梅.基于DSP的锅炉汽包水位控制系统的控制策略的研究[D].安徽理工大学,2009.
[2] 李中宁.基于MATLAB的锅炉水位模糊控制系统的设计和分析[D].长春理工大学, 2008.
[3] 陈平,陈小云.基于MATLAB的锅炉水位控制系统的设计与仿真[J].机电技术,2006,29(1):4-5.
[4] 刘静纨,魏东,戴正伟.基于模糊PID控制的VAV控制系统研究与实现[J]. 北京理工大学学报,2010,30(8):920-924.
[5] 王卓,付冬梅,刘德军.锅炉汽包水位控制系统的研究[J].自动化仪表,2006,27(11):51-56.
[6] 沈刚,丛大成,韩俊伟.模糊免疫PID控制在淀粉生产线中的应用[J].农业机械学报,2008,39(10):109-118.
[7] 王万召,赵兴涛,宋艳萍.模糊RBF自整定PID控制器在过热汽温控制中应用[J]. 电力自动化设备,2007,27(11):48-50.
[8] 胡包钢,应浩.模糊PID控制技术研究发展回顾及其面临的若干重要问题[J]. 自动化学报,2001,27(4):567-584.
[9] 杨鹏,文喜星,周伶俐.基于模糊PID控制的静电悬浮研究[J]. 西北工业大学学报,2010,28(2):308-312.
[10] 宋淑然,阮耀灿,洪添胜,等. 果园管道喷雾系统药液压力的自整定模糊PID控制[J].农业工程学报,2011,27(6):157-161.
[责任编辑:蒋海龙]
ModelingandSimulationforBoilerDrumLevelControlBasedonMatlab/Simulink
JIN Lu1, CHEN Yong2
(1.School of Electrical and Automation Engineering, Nanjing Normal University, Nanjing Jiangsu 214006, China)(2.School of Physical and Electronic Electrical Engineering, HuaiYin Normal University, Huanan Jiangsu 223300, China)
A new type of boiler drum water level fuzzy PID controller is designed in this paper, which analysed the mathematical model of the boiler drum water level control system, the constructure of the fuzzy PID controller and working principle and effect. The water level controlling of fuzzy PID controller and the common controller is simulated respectively by applying Matlab/simulink. The result shows that the fuzzy PID controller design is reasonable and controllable.
matlab; fuzzy-PID; drum level
TP272
A
1671-6876(2012)02-0150-04
2012-04-26
金璐(1990-), 女, 江苏淮安人, 研究方向为电气与自动化工程.
猜你喜欢
湖南电力(2021年4期)2021-11-05
初中生世界·九年级(2020年9期)2020-09-21
山东工业技术(2016年15期)2016-12-01
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
电测与仪表(2016年14期)2016-04-11
通信电源技术(2016年5期)2016-03-22
地震地质(2015年3期)2015-12-25
上海金属(2015年4期)2015-11-29
电源技术(2015年11期)2015-08-22