
基于自适应动态逆的自动空中加油轨迹跟踪
2012-12-19 08:57盖文东王宏伦李大伟
北京航空航天大学学报 2012年5期
盖文东 王宏伦 李大伟
(北京航空航天大学 飞行器控制一体化技术重点实验室,北京100191)
随着无人作战飞行器(UCAV,Unmanned Combat Aerial Vehicles)的研制与应用,迫切需要安全、可靠的自动空中加油(AAR,Automated Aerial Refueling)技术来增加其有效载荷、拓展其航程、延长其执行任务时间,减少其对前沿机场的依赖.与此同时,AAR技术也可以有效减轻有人机飞行员执行空中加油任务的操纵负担,提高空中加油的安全性和效率[1].
在受油机接近加油机的过程中,无论是硬式还是软式空中加油,都需要精确控制受油机飞行轨迹.而且,加油机尾涡对其后的受油机影响明显,文献[2-3]根据马蹄涡理论,通过气动等效方法,将尾涡影响等效为作用于受油机的风扰动.另外,受油机还会受到大气风场的干扰,因此,受油机需要具备在较强风干扰下精确控制飞行轨迹的能力.
飞行器轨迹跟踪控制有两种方式:将控制器分为外层导引环和内层控制环,导引环产生导引指令,控制环跟踪该指令;将内外环综合考虑同时设计.文献[4-5]均为后一种方式,分别采用线性二次型方法和基于比例-积分的全状态反馈方法,在受油机线性化模型基础上,设计受油机轨迹跟踪控制系统,实现了三维轨迹跟踪控制,但并未考虑尾涡等风扰动影响.内外环分离的轨迹跟踪方式物理概念更明确,也更易实现.文献[6]采用纯追踪法设计导引环,非线性动态逆设计姿态控制环,以实现两架无人机接近与编队飞行,但并未考虑风扰动和逆误差的影响.
文献[7]提出一种非线性路径跟随导引方法,并将其应用于侧风影响下的双机编队飞行控制,取得了较好的控制效果.但该导引方法仅用于飞行器的横侧向导引控制,且缺乏对于模型不确定性的自适应能力.文献[8]在直升机姿态角控制回路采用自适应神经网络补偿系统逆误差,取得了较好的姿态控制效果,但存在稳态误差,而且当需要较大自适应增益以抵消模型不确定性时容易出现振荡现象.文献[9]采用了类似文献[8]的控制结构,将姿态角误差动态方程由比例-微分型改进为比例-积分型,在一定程度上提高了系统稳态性能,但大自适应增益时的振荡现象依然存在.
本文分别对非线性路径跟随导引和自适应神经网络动态逆方法进行改进,通过仿真比较,验证了该轨迹跟踪控制方法的有效性.
1 非线性导引律
1.1 非线性导引的基本原理
非线性路径跟随导引方法是一种改进的纯追踪法,其导引指令使飞行器接近、并沿着期望轨迹飞行,其基本原理如图1[7]所示.指定参考轨迹上一参考点,则导引指令为
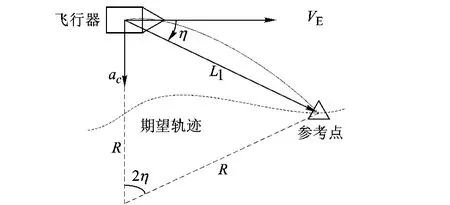
图1 非线性导引律原理图

式中,VE为飞行器地速;η为VE到L1的偏转角;L1为参考点到飞行器的距离.
由图1可知在某一瞬时,ac使飞行器沿着与VE相切的半径为R的弧线轨迹飞抵参考点.
1.2 受油机纵向非线性导引律
当受油机跟踪纵向期望轨迹时,其非线性导引律示意图如图2所示.

图2 纵向导引律示意图
图2中纵向导引指令 ac,z使受油机沿着与VE,z相切的半径为Rz的弧线轨迹飞抵参考点,表达式为

由图2几何关系得

将式(3)代入式(2)得

式中,L1,z可根据期望的纵向跟踪性能选择,ηz的正负满足右手定则.根据图2几何关系可得

1.3 受油机横侧向非线性导引律
当受油机跟踪横侧向期望轨迹时,非线性导引律示意图如图3所示.
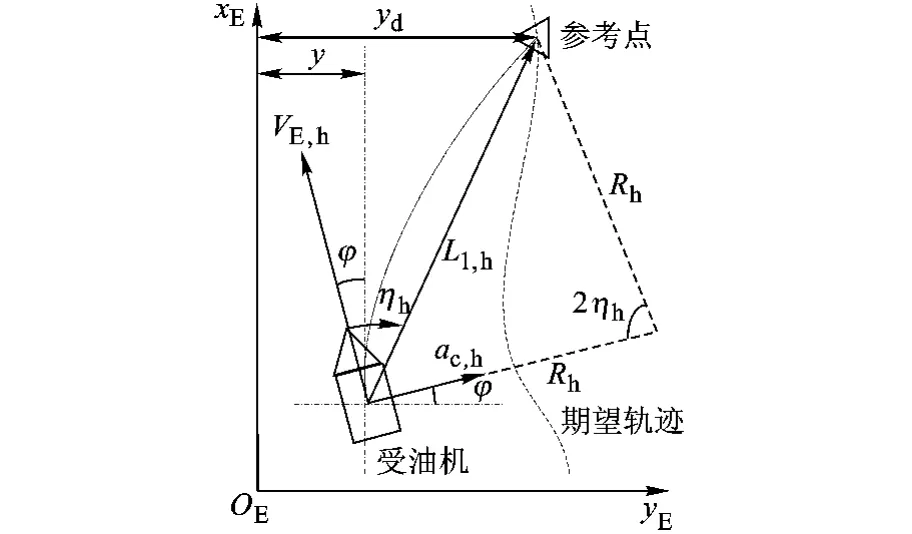
图3 横侧向导引律示意图
采用类似纵向的方法可得横侧向非线性导引指令 ac,h为

式中,L1,h可根据期望的横侧向跟踪性能选择,ηh的正负满足右手定则.由图3几何关系得

2 受油机姿态角控制指令
式(4)和式(6)得到的导引指令需转换为受油机姿态角指令,即将 ac,z和 ac,h分别转换为迎角指令 αc和滚转角指令 φc.但由于 ac,z和 ac,h均定义在受油机航迹坐标系中,因此需要通过坐标变换,分别转换到气流坐标系和机体坐标系中.
受油机气流坐标系下纵向力方程[10]为)

式中,alon为纵向加速度;FT为发动机推力;α为迎角;L为升力;m为质量;

式中,θ为俯仰角;φ为滚转角;)

式中,CLα为升力线斜率;α0为零升迎角;Q为动压;S为机翼面积.
式(4)得到的 ac,z转换到气流坐标系为 aqcz,代替式(8)的alon得)

将式(10)代入上式得

受油机机体坐标系下横侧向力方程[10]为

式中,alat为横侧向加速度;D为阻力;Y为侧力;β为侧滑角.
式(6)得到的ac,h转换到机体坐标系为 aqch,代替式(13)的alat得

受油机进行横侧向机动,需保持协调转弯,即β=0;同时假定Y≈0,θ和φ均较小,则式(14)可简化为

由式(15)得

协调转弯要求侧滑角指令为

3 受油机姿态控制
根据时标分离原则,将受油机姿态控制分解为姿态角慢回路和角速率快回路.采用非线性动态逆方法设计姿态角慢回路,而采用基于线性状态方程的动态逆方法设计角速率快回路,并采用自适应神经网络在角速率快回路实现模型误差补偿.受油机姿态控制结构图如图4所示.

图4 受油机姿态控制结构图
3.1 基于动态逆的姿态角慢回路设计
期望的慢回路动态为
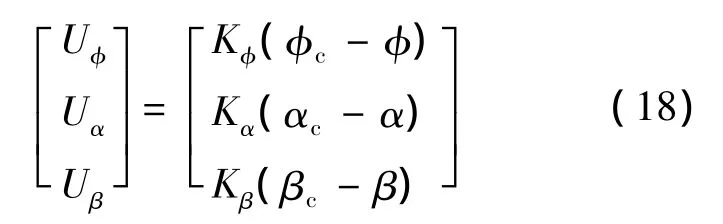
式中,Uφ,Uα,Uβ为姿态角伪指令;Kφ,Kα,Kβ为被控状态(φ,α,β)的带宽,可根据期望动态性能选取.姿态角的动态方程[6]为

式中,VT为空速;g1可由式(9)得到;

将式(19)进行整理,从中解出姿态角速率(p,q,r)T,并分别用(pd,qd,rd)T、(Uφ,Uα,Uβ)T代替(p,q,r)T和得

式中

3.2 基于神经网络动态逆的角速率快回路设计
假定某一名义设计状态下,角速率的线性化状态方程为

式中,Af,Bf分别为系统和控制矩阵;状态变量x=[p,q,r]T;控制量 Δu=[Δδa,Δδe,Δδr]T.以式(23)为设计模型进行动态逆设计,控制量Δuc为

将式(24)代入式(23)得 x·=Δud,系统成为一阶积分环节,若Δud=k(xc-x),则可通过调节增益k得到期望动态响应.
角速率的实际状态方程有如下非线性形式:

式中,f(x,u),g(x,u)是与状态和控制量相关的非线性函数;u=[δa,δe,δr]T;Δ1为外部干扰,包括姿态角慢回路逆误差以及风扰动等.由式(23)和式(25)得

式中,Δ2为设计模型存在的误差,令Δ=Δ1+Δ2.
将式(24)代入式(26)得 x·=ud+Δ,若 Δ≠0则不能得到前述的一阶积分环节.由于神经网络具有逼近任意非线性函数的能力,因此用神经网络输出uad来抵消误差Δ,即

令伪控制指令ud为

式中,状态期望值 xc=[pc,qc,rc]T;

式中,Kc,Kp和Ki均为3×3的对角矩阵,其对角线元素分别对应滚转、俯仰、偏航通道的控制系数,可根据希望动态性能选取.将式(28),式(29)代入式(27)得姿态角速率误差动态方程:


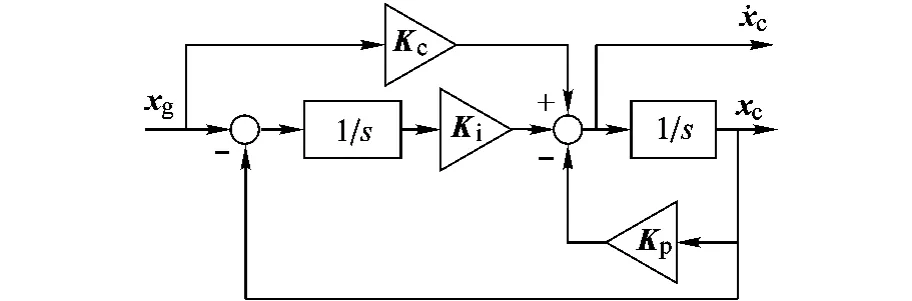
图5 命令滤波器结构图
式(31)得到了与文献[8]相似的误差方程,因此采用类似的Sigma-Pi神经网络及其权值更新律设计uad.以俯仰通道为例(其他通道可类似得到),其网络输出和权值调节律为

式中,Kp,q,Ki,q分别为对角矩阵 Kp,Ki对角线上的第2个元素;wq,λq和Gq分别为俯仰通道的网络权值、自适应增益和基函数,其中Gq为

式中,kron(·,·)为求两个向量的Kronecker积,各向量为
滚转、偏航通道的基函数Gp和Gr为
式中,k=p,r;Ci为
4 仿真结果及分析
在Matlb环境下对自动空中加油接近段轨迹跟踪控制系统进行非线性仿真.加油机以6.05 km,190 m/s水平前飞,受油机位于加油机后方200 m,下方50 m,右侧30 m,并沿着一条期望轨迹接近加油机,该期望轨迹可通过多项式拟合得到[4].受油机的名义飞行状态为高度6 km,速度190 m/s,并在此飞行状态下得到如式(23)的设计模型1.仿真中取自适应增益为λq=20,λp=λr=100.
4.1 受油机轨迹跟踪控制仿真
将本文提出的基于非线性导引和PI型自适应神经网络动态逆的轨迹跟踪控制方法(简称非线性导引方法)与文献[11]的PID轨迹跟踪控制方法(简称PID控制方法)进行仿真比较.在无风扰动的情况下,上述两种方法的三维轨迹跟踪曲线如图6所示.
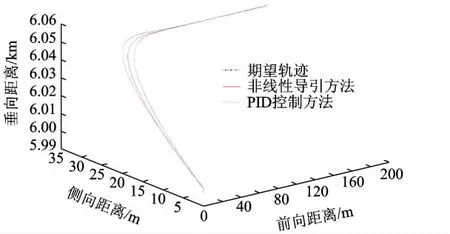
图6 受油机三维飞行轨迹(无风时)
图6中,非线性导引方法和PID控制方法均能使受油机跟踪期望轨迹,但非线性导引方法更接近期望轨迹且侧向超调量更小.
当受油机从正后方接近加油机时,受油机主要受到尾涡产生的下洗流影响,由文献[3]可知,在加油机正后方较近处的尾涡可等效为5 m/s的下洗流,因此,在180 s时,加入5 m/s的正向垂风来模拟尾涡影响.另外受油机经常受到侧风的影响,因此,在200 s时,加入10 m/s的正向侧风.受油机先在名义状态实现水平飞行,并从60 s时开始跟踪参考轨迹,其飞行轨迹和轨迹跟踪误差曲线分别为图7和图8.
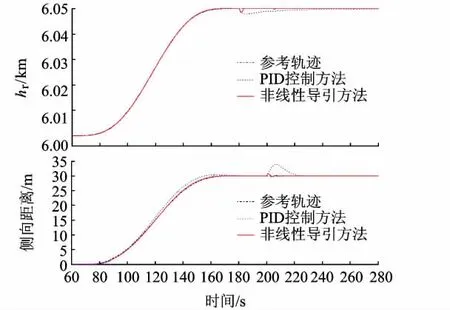
图7 受油机飞行轨迹(有风时)

图8 受油机轨迹跟踪误差曲线(有风时)
图7和图8中,受油机受到尾涡、侧风干扰后,非线性导引方法的高度和侧向跟踪误差均较小(跟踪误差均在1.5 m以内),而且更快地减小为0.可见非线性导引方法具有更强的轨迹跟踪和抗风能力.
在高度8 km,速度300 m/s下得到如式(23)的设计模型2.图9给出在名义飞行状态(高度6 km,速度190 m/s)下,采用设计模型2(此时,设计模型与受油机非线性模型的参数差别较大)的非线性导引方法有/无神经网络补偿时的高度跟踪曲线.

图9 受油机高度跟踪曲线(有风时)
图9中,无神经网络补偿时,受油机的高度轨迹是发散的;有神经网络补偿时,受油机能够跟踪期望轨迹.这表明本文方法对于模型参数变化具有较强的自适应性和鲁棒性.
4.2 受油机姿态跟踪控制仿真
在名义飞行状态(高度6 km,速度190 m/s)下,根据设计模型2,分别采用本文与文献[9]的姿态控制方案,跟踪方波指令.姿态角跟踪曲线如图10所示,两种方案均采用前述自适应增益.
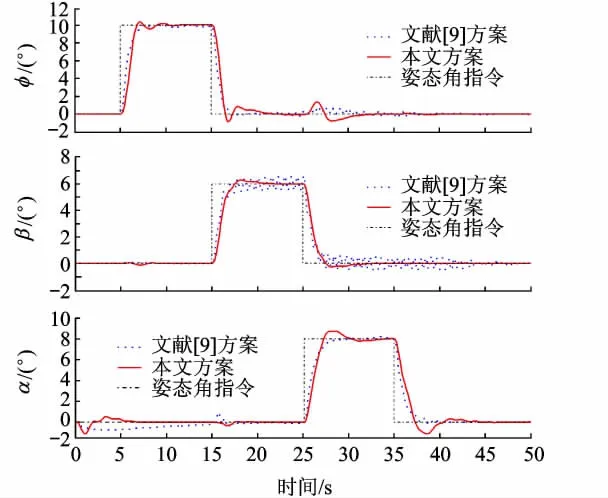
图10 两种控制方案的姿态响应曲线
设计模型2与名义飞行状态下的受油机模型相比,其模型参数发生了很大变化,由图10可见,两种方案均实现了姿态指令跟踪,但本文的方案有效抑制了震荡现象,跟踪效果更好.
5 结论
本文提出了一种基于非线性路径跟随导引和自适应神经网络动态逆的受油机轨迹跟踪控制方法,其具有以下特点:
1)将非线性路径跟随导引方法扩展到受油机轨迹跟踪的纵向导引控制.
2)采用导引环与姿态控制环分离的控制策略,根据动力学关系将导引指令转换为姿态角指令,实现了导引律与控制律的综合.
3)当存在尾涡等风扰动和模型不确定性时,本文轨迹跟踪控制方法的高度和侧向跟踪误差均小于1.5 m,可以满足自动空中加油接近段的控制要求.
4)所提出的基于角速率误差方程的PI型自适应神经网络姿态控制系统,能够有效避免大自适应增益时的振荡现象,具有较好地姿态跟踪控制能力.
References)
[1]Nalepka J P,Hinchman J L.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[R].AIAA 2005-6005,2005
[2]Bloy W A,Khan M M.Modeling of the receiver aircraft in air-toair refueling[J].Journal of Aircraft,2001,38(2):393 - 396
[3]李大伟,王宏伦.自动空中加油阶段加油机尾涡流场建模与仿真[J].北京航空航天大学学报,2010,36(7):776 -780 Li Dawei,Wang Honglun.Wake vortex effect modeling and simulation in automated aerial refueling[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(7):776 - 780(in Chinese)
[4]Fravolini M L,Ficola A,Campa G,et al.Modeling and control issues for autonomous aerial refueling for UAVs using a probedrogue refueling system[J].Aerospace Science and Technology,2004,8(7):611 -618
[5]Tandale M D,Bowers R,Valasek J.Trajectory tracking controller for vision-based probe and drogue autonomous aerial refueling[J].Journal of Guidance,Control,and Dynamics,2006,29(4):846-857
[6]Keisuke E,Takeshi Y,Hiroyuki T,et al.Guidance and control system design for chase UAV[R].AIAA 2008-6842,2008
[7]Park S,Deyst J,How J P.Performance and Lyapunov stability of a nonlinear path-following guidance method[J].Journal of Guidance,Control,and Dynamics,2007,30(6):1718 - 1728
[8]Leitner J,Calise A,Prasad J.Analysis of adaptive neural networks for helicopter flight control[J].Journal of Guidance,Control,and Dynamics,1997,20(5):972 -979
[9]Schumacher C.Adaptive flight control using dynamic inversion and neural networks[R].AIAA 1999-4086,1999
[10]Stevens B L,Lewis F L.Aircraft control and simulation[M].New York:Wiley,2003:80 -85
[11]李大伟,王宏伦.无人机自动空中加油飞行控制技术[J].系统仿真学报,2010,22(增):126 -130 Li Dawei,Wang Honglun.UAV flight control in automated aerial refueling[J].Journal of System Simulation,2010,22(suppl):126-130(in Chinese)
猜你喜欢
军民两用技术与产品(2022年2期)2022-06-01
北京航空航天大学学报(2021年4期)2021-11-24
学校教育研究(2020年11期)2020-06-08
通信电源技术(2020年1期)2020-01-06
科技视界(2018年22期)2018-10-08
汽车实用技术(2015年8期)2015-12-26
汽车文摘(2015年11期)2015-12-02
科技传播(2015年20期)2015-03-25
中国航海(2014年4期)2014-11-29
西安航空学院学报(2014年5期)2014-07-13
