基于STK的导航星模拟及天文定位选星算法研究*
2013-05-15 00:57刘建业
航天控制 2013年3期
赵 慧 熊 智 王 融 张 承 刘建业
南京航空航天大学导航研究中心,南京 210016
空天飞行器集航空技术和航天技术的优势于一体,具有航空与航天的双重功能和2个空间层次的作战能力,是未来取得制空、制天权的有利武器[1-3]。天文导航作为一种独立的、近自主的导航方式,具有抗干扰能力强、隐蔽、可靠等特点[4-5],十分适合空天飞行器的跨空天大空域飞行。本文结合空天飞行器在轨段飞行情况,开展导航星模拟及天文定位选星算法研究。
要研究天文导航系统,首先要具有相应的星图,但由于条件限制,很多所需星图不可能通过实际拍摄得到,因此需要采用模拟的方法获得[6]。目前,导航星的模拟方法主要是基于CCD星敏感器的,但是该种方法硬件成本较高,开发周期较长,需要构建专用的星图模拟发生器。为此,本文从计算机仿真研究出发,结合天文导航对导航星的要求,提出了基于STK的导航星模拟方法。该方法一方面可以有效地获得天文观测恒星库,大大减少硬件开发的工作量;另一方面可以方便地结合空天飞行器在轨段飞行航迹进行导航星可见性等分析。此外,本文在导航星库构建的基础上,还针对天文导航中不可避免的选星问题,设计了不同的选星方案,研究了不同选星方案下的天文定位性能,旨在分析选星对天文定位性能的影响。
1 基于STK的天文导航星模拟研究
1.1 导航星库的制定
星库的制定方法有很多种。目前,常采用的方法是使用各种星表中的信息进行模拟。但是,星表包含星等、B-V、光谱型、自行、视向速度、视差等数据,数据量非常庞大,其中许多数据在天文导航中是不需要的,同时星表中的许多恒星不符合导航星的条件,若进行筛选,工作量将非常大。因而,本文使用STK软件中带有的恒星库,设定相应的导航星条件,实现导航星模拟。
为了适应飞行器各种不同飞行轨迹,使飞行器在全球范围内都尽可能地观测到更多恒星,本文使用球矩阵划分法的思想[7],即将天球表面按赤经和赤纬划分为M*N块,如图1所示。在每块区域导入数颗导航星,使得全球范围内均有导航星分布,尽量避免出现观测盲区。

图1 球矩阵空间划分
因此,在STK软件中,导入STK自带的恒星数据库,采用球矩阵划分的思想,按每10°赤经和每90°赤纬进行设定,将天球划分为36*2块,同时设定恒星星等范围。考虑到目前大多数星敏感器只能识别亮度大于6星等的恒星,设定恒星星等范围为0~6星等,继而搜索符合条件的恒星,随机选取部分数据进行导入,最后获得所需的导航星库。
1.2 导航星库信息提取
在完成导航星库的制定之后,需要进一步提取恒星信息,用于天文导航解算所用。天文导航以已知准确空间位置的自然天体为基准,通过天体测量仪器被动探测天体位置,经解算确定量测点所在载体的导航信息[5]。因而要进行天文导航,首先需要得到天体的位置信息。而恒星的位置信息通常用第二赤道坐标系中的坐标(赤经和赤纬)表示,鉴于STK软件可以提供各种文本分析结果,其恒星数据是在标准历元(J2000坐标)下,利用这一特点返回所导入恒星的赤经、赤纬信息,数据信息以CSV格式返回,其部分内容如表1所示。由表1可见返回的恒星赤经、赤纬信息未与恒星星号对应,因而需要进行数据处理,使其能够在天文导航过程中被有效利用。数据处理过程如图2所示。经处理后,得到恒星星号与赤经、赤纬对应的数据信息。
1.3 结合飞行航迹的信息提取
在完成星库的制定以及恒星信息提取的基础上,进一步结合飞行器的飞行航迹进行相关信息的提取,即可获得飞行器在飞行过程中的天文观测信息。根据天文导航所需的信息,需要提取的数据有:飞行器的航迹数据和每一时刻能够观测到的导航星信息。
STK仿真软件能够创建场景,加载卫星、飞机、船、车辆、运载火箭、导弹等运动对象,设定对象的特性及运动航迹,产生位置和姿态数据,获取时间、传感器覆盖程度等分析数据。为此,创建Aircraft(飞机)为运动对象,依据空天飞行器在轨段设置其飞行航迹, 通过STK中的report,可获得飞行器的航迹数据,表2为部分航迹数据。通过在Aircraft上安装传感器,模拟天文敏感器[8],并利用STK中的链路分析功能,可以获得任意时刻恒星数目及相应星号,表3为部分恒星信息表。

表2 STK生成的飞行航迹数据

表3 观测到的恒星数据
2 选星方案设计
天文导航是以观测天体为基础进行的,因而所选用的导航星直接影响天文定位的性能。天文选星一般基于以下原理:
1)恒星亮度要较亮。目前,大多数CCD星敏感器只能识别亮度大于6星等的恒星,即恒星星等大于6等才能被识别;
2)恒星之间方位角要合适。在双星定位过程中,方位角之差|A1-A2|≈90°时,天文定位具有较好的精度[9];
3)恒星的高度要适中。若恒星能被观测到,则高度角至少大于0°。
因此,本文在设计星库时,选择亮度大于6星等的恒星作为导航星,确保星库中的恒星都能被星敏感识别。在此基础上,为说明导航星对天文导航的影响,本文设计了3种不同方案:全程双星方案、全程动态随机选星方案、全程动态方位角选星方案。
2.1 全程双星方案
全程双星顾名思义即在整个导航过程中只用2颗恒星作为导航星,该选星方法原理简单,直接在仿真过程中给出这2颗恒星的赤经、赤纬等信息即可。该方法运算量少,易于实现。但存在以下不足:
1)该方法不适用于飞行器的长航迹飞行。目前,比较常用的星敏感器视场范围为10°×10°~50°×50°[10],范围较之前的小视场星敏感器已经有了极大的提高,但是,其能观测到恒星的时间仍旧是十分有限的。因而对于较短的飞行航迹来说,能够保证在其飞行时间内均能观测到这2颗星,但是,对长航迹飞行来说,这2颗导航星只能在某段时间内被观测到,过了这一范围,便不能观测到这2颗星,这也就意味着无法用天文导航的方法进行定位。
2)该方法的定位性能不太理想。在飞行器飞行过程中,这2颗恒星在星敏感器的视场内位置在不断改变,即表明测得的恒星高度角及方位角在不断变化。虽在刚开始可以选择2颗具有较好定位精度的恒星作为导航星,但是随着飞行器的不断运动,恒星的几何位置在不断变化,这使得定位精度受到影响。
2.2 全程动态随机选星
为了克服全程双星方案中存在观测不到导航星等问题,本文提出全程动态随机选星方法。即结合从STK提取的任意时刻可见星信息,全程不断变换导航星。其基本思想为:根据航迹信息,得到某一时刻的所有可见星数目及可见星星号,从这些恒星中随机选取2颗恒星,通过查找导航星库数据,得到这2颗星的赤经、赤纬等信息,用于天文定位。其基本流程如图3所示。

图3 全程随机动态选星流程图
由于本文以仿真试验为目的,因而未在STK中导入所有符合条件的恒星,只在每块区域中随机导入几颗恒星。因此可能出现在某一位置,观测到的恒星数目小于2。当系统提示可见星数目小于2时,只需在STK中的该区域内再导入几颗恒星,便可解决这一问题。在后续的研究中,可以尽可能多地将符合条件的恒星导入STK中,以便更加真实地模拟实际星空。
全程动态随机选星,即随航迹变化不断更改导航星,能够确保在整个飞行过程中,用于进行天文定位解算的导航星在飞行器的星敏感器视场范围内。这使得整个天文定位仿真更加贴近实际飞行器的情况。
当然,全程动态随机选星方案也存在一些不足。首先,对比全程双星定位,该方法的数据运算量增加。其次,由于采用随机选星的方法,选星结果存在较大的随机性。随机选择的2颗导航星既可能使天文定位具有较高的解算精度,也可能由于2颗星的位置太过接近等因素使得定位精度大大降低。
2.3 全程动态方位角选星
鉴于全程动态随机选星存在较大的随机性,本文提出在全程动态选星的基础上,考虑导航星的方位角,进行选星方案的设计。其基本思想是:根据飞行航迹,得到该时刻飞行器上星敏感器所能观测到的恒星数目和星号,查找导航星库数据,得到此时所有可见恒星的赤经、赤纬等信息,计算这些恒星的方位角。根据双星导航时,两星之间的方位角之差|A1-A2|≈90°时,天文定位能够获得较好的几何精度这一原理,两两计算恒星的方位角之差,得到方位角之差最接近90°的2颗恒星作为导航星,输出这2颗导航星的信息。
全程动态方位角选星方案,一方面能够避免全程双星带来的不可观测问题,另一方面也能避免全程动态随机选星带来的随机波动性,在一定程度上,提高了天文定位的稳定性。同时,使天文定位具有较好的几何解算精度,提高定位性能。
3 天文定位性能仿真验证
本文采用基于高度差法的天文定位仿真系统,选择上述不同选星方案,进行仿真研究,解释以下几个问题:
1)全程双星方案下,所选择的导航星方位角之差是否对天文定位有影响;
2)全程双星的过程中是否会出现所选择导航星在某一段时间不出现在天文敏感器视野内,从而导致天文定位失败的情况;
3)若全程双星方案中出现导航星不可见的情况,通过全程动态随机选择的方法能否解决上述问题;
4)在全程动态选星的基础上,通过选择2颗导航星方位角之差尽可能接近90°,能否改善天文定位性能。
3.1 仿真条件
本文设天文的高度角和方位角观测误差为10″,增加惯导误差以模拟惯导定位情况,用以提供天文定位初始位置,其等效陀螺漂移为0.01(°)/h,等效加速度计零偏为10-4g,陀螺一阶马尔可夫过程相关时间为3600s,加速度零偏一阶马尔可夫过程相关时间为1800s,惯导误差曲线如图4。模拟空天飞行器在轨段飞行航迹如图5所示,初始高度为300km,仿真时间为1200s。
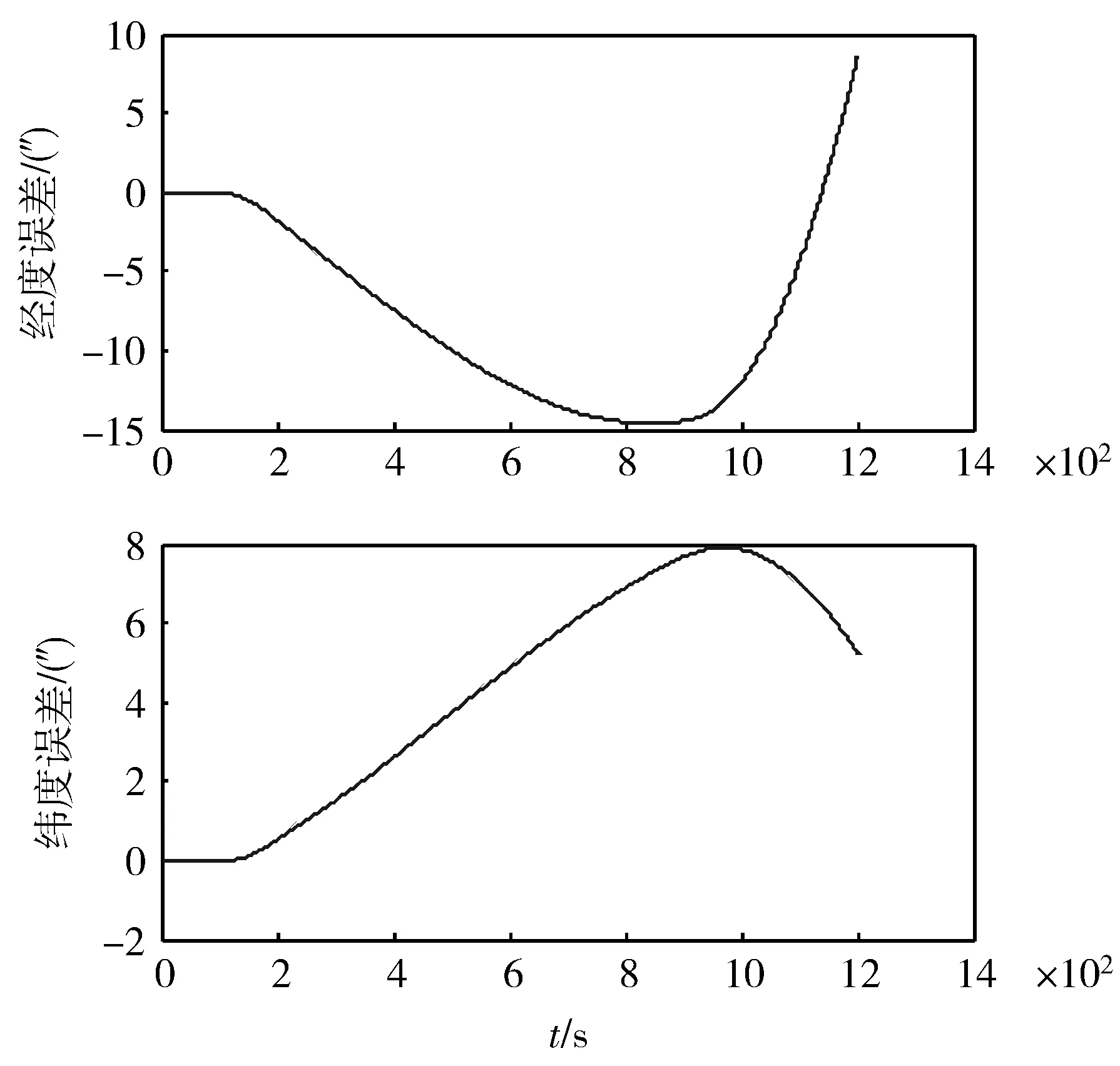
图4 惯导位置误差

图5 仿真航迹图
3.2 仿真结果与分析
在上述基础上,选择不同的选星方案进行天文定位仿真,得到仿真结果如下:
1)全程双星方案

图6 全程双星方案下天文定位仿真曲线
2)全程动态随机选星方案

图7 全程动态随机选星方案下天文定位仿真曲线
3)全程动态方位角选星方案

误差项全程双星全程动态随机选星全程方位角选星均值(″)标准差(″)均值(″)标准差(″)均值(″)标准差(″)经度误差-0.1420.90-0.3516.090.02010.10纬度误差-0.4552.560.3214.640.02110.07
通过分析上述仿真图及数据表,可以得到以下结论:
1)由图6(c)可知,全程双星方案下,所选择的2颗导航星在1054s后定位失效。从图6(a)导航星高度角曲线可以发现,在1054s时,1颗导航星的高度角已接近于0°,随后,2颗导航星的高度角均小于0°,这表明,此时这2颗导航星已经不能被观测,天文定位失效。由图6(b)可知,在定位有效段,导航星的方位角之差未接近90°。由表4可知,该选星方案下天文定位经度误差的标准差为20.90″,纬度误差的标准差为52.55″,定位性能较差;
2)由图7(c)可知,全程动态随机选星方案下,天文定位在整个飞行过程中有效。从图7(a)可见,在整个过程中,所选导航星的高度角均大于0°,由此可见,全程动态随机选星方案可以保证导航星的可见性,从而保证天文定位的有效性。但是,随机选星方案随机性较强,使天文定位性能存在较大波动性。从表4可知,该选星方案下天文定位经度误差的标准差为16.10″,纬度误差的标准差为14.64″,对比全程双星方案,定位性能有所改善;
3)由图8(c)可知,全程方位角选星方案下,天文导航定位误差维持在一个较稳定的状态。从表4可知,该选星方案下天文定位经度误差的标准差为10.10″,纬度误差的标准差为10.0756″,对比全程双星、全程动态随机选星,天文定位误差有所减小。由图8(b)可知,通过方位角选星,可以尽量使得导航星方位角之差接近90°,此时天文定位误差较小。由此可得,在确保天文定位有效的前提下,选择方位角之差为|A1-A2|≈90°的2颗恒星作为导航星,能够提高天文导航定位性能。
4 结论
针对导航星模拟,设计实现了基于STK软件,并结合天文导航对导航星的要求设计实现了天文定位方案。本文在天文星库模拟的基础上,针对空天飞行器在轨段飞行航迹特点,设计了3种不同的选星方案,并通过天文定位仿真系统进行仿真。根据仿真结果可以发现:3种方案中,全程动态方位角选星方案,一方面可以保证所选导航星有效,另一方面可以提高天文定位性能。
当然,仅从方位角的角度考虑天文选星还是不够的。在后续的研究中,还可以从恒星的高度角、恒星星等、离视场轴距离情况等角度进行考虑,进一步加深研究。本文所研究提出的天文导航星库模拟及改进的天文选星方案可以有效应用于空天飞行器的建模分析过程中,对于空天飞行器的实际应用具有重要的参考价值。
参 考 文 献
[1] 李大光.太空作战的指导思想[J].国际太空, 2004(3):27-30.
[2] Bowcutt K G.A Perspective on the Future of Aerospace Vehicle Design [C]//12th AIAA International Space Planes and Hypersonic Systems and Technologies.Norfolk:AIAA,2003-6957.
[3] Chudoba B, Huang X, Coleman G.Future Space Tourism Transportation Design Requirements [C]//AIAA/CIRA 13th International Space Planes and Hypersonic Systems and Technologies.Capua: AIAA,2005-3445.
[4] 何炬.国外天文导航技术发展综述[J].舰船科学技术, 2005,27(5):91-96.(HE Ju.Survey of Overseas Celestial Navigation Technology Development[J].Ship Science and Technology,2005,27(5):91-96.)
[5] 房建成,宁晓琳.天文导航原理及应用[M].北京:北京航空航天大学出版社, 2006: 69-90.
[6] 赵明波,刘雨,陶征宇,贺勇军.一种机载天文导航星图模拟的实现方法[J].光电子技术,2008,28(3):184-188.(ZHAO Mingbo,LIU Yu, TAO Zhengyu, HE Yongjun.One Method on Star Image Simulation of AirborneAstronomical Navigation [J].Optoelectronic Technology, 2008,28(3):184-188.)
[7] 庄显忠.快速区域星图显示与分析[D].南京: 南京航空航天大学,2006,12.(ZHUANG Xianzhong.Research on Fast Display and Analysis of Region Star-Image[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2006,12.)
[8] Sangwoo Cho, Joohwan Chun.Satellite Attitude Acquisition Using Dual Star Sensors with a Bootstrap Filter[C].IEEE Sensors,2002: 1723-1727.
[9] 刘建业, 曾庆化, 赵伟, 熊智,等.导航系统理论与应用[M].西安:西北工业大学出版社,2010: 251-265.
[10] 欧阳桦.基于CCD星敏感器的星图模拟和导航星提取的方法研究[D].武汉: 华中科技大学, 2005,4.(OU-YANG Ye.Research on Star Image Simulation and Star Extraction Method for CCD’s Star Tracker[D].Wuhan: Huazhong University of Science and Technology, 2005,4.)
猜你喜欢
小学阅读指南·低年级版(2021年5期)2021-05-28
卷宗(2021年2期)2021-03-09
空间科学学报(2020年4期)2020-04-22
青年歌声(2019年12期)2019-12-17
北京航空航天大学学报(2017年7期)2017-11-24
广东第二课堂·小学(2017年2期)2017-02-20
北京航空航天大学学报(2016年6期)2016-11-16
学生天地(2016年31期)2016-04-16
河南科技(2015年18期)2015-11-25
舰船科学技术(2015年8期)2015-02-27