GPS工程控制网在水利工程中的应用
2013-11-13 08:50马峰
中州大学学报 2013年4期
马 峰
(河南省水利工程二局信阳江河公司,河南信阳464000)
全球定位系统(Global Positioning SystDm -GPS):利用GPS定位卫星,在全球范围内实时进行定位、导航的系统,称为全球卫星定位系统,简称GPS。经过快速发展,目前GPS在水利工程中的应用优为广泛。大多数水利工程都位于偏远地区,由于地形限制,高等级测量控制点布设困难,给水利工程施工测量带来很大困难,而且大部分水利工程都有纵向跨度很长但横向宽度较窄的特点,用传统的控制网布设方法会大大增加工作量,而GPS静态定位选点灵活、不要求测站间相互通视,全天候作业、作业效率高且作业成本低,大大降低了布网费用。
一、静态定位:
GPS静态相对定位也称为差分GPS,是采用载波相对定位观测以及相位观测的线性组合技术,减少各类误差。主要用于测区平面控制网布设及复核。[1]
作业方法:采用两台(或两台以上)接收设备,分别安置在一条或数条基线的两个端点,同步观测4颗以上卫星,每时段长45 min至2 h或更多。作业布置如图1所示。
布设GPS工程控制网主要分测前、测中和测后三个阶段。在具体施测前要系统的了解测区位置及其范围、控制网的控制面积、用途和精度等级、点位分布及点的数量、需要提交的成果内容、时限要求、投入经费、技术设计方案、测绘资料的搜集、踏勘、选点埋石与整理及仪器的校检。
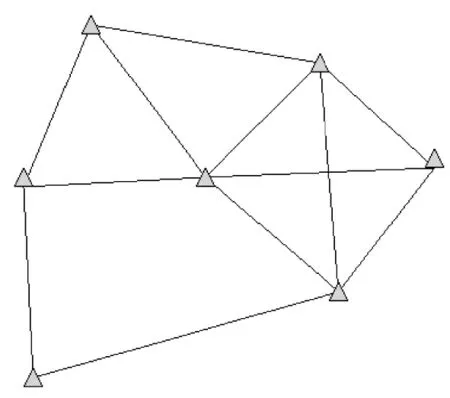
图1
二、工程实例
南水北调中线工程郑州2段3标位于郑州二七区,起于郑州贾寨,终于郑州黄冈寺,设计桩号为SH(3)190+688.1 ~ SH(3)197+408.1,本段渠道全长6.72 km。其中多分布城中村,该区多为务工人员。气候属于暖温带大陆性气候区,气候温和,四季分明,光照充足。年平均气温14.3℃,降雨量640毫米。夏季七月份最热,月平均气温27.3℃。冬季一月份最冷,月平均气温为-0.2℃。冬季寒冷而干燥,春秋季节,冷暖适中。测区地形复杂,地质条件良好,交通不便,多为施工场地。
(一)测区平面控制点资料
测区有C等控制点两个、D等控制点三个,其中点JSH2位于道路附近,有被车辆碾压现象,其余四点标石均为不锈钢标,标点清晰,外观完好。点位之间植被及民房较多,互不通视。有1954年北京坐标系的成果资料,可作为渠道测区GPS控制网的平面坐标起算数据。
(二)平面坐标系统的选择
由于使用的是1954年北京坐标系3度带第38带。在本测区的长度投影变形值经计算已经超过了规范规定的2.5 cm/Km,故本次测量的平面坐标系统采用经改算的1954年北京坐标系,可以满足本次控制网布设的需求,其基准参数如表1所示。
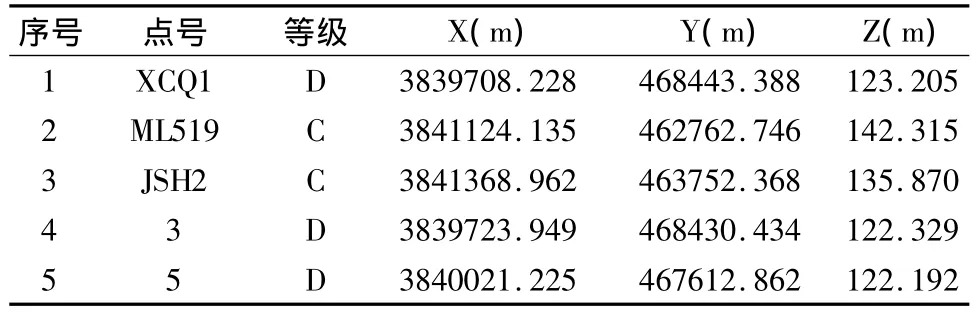
表1 已有测量控制点一览表

表2
中央子午线经度为东经114°,边长的高程归化面为±0 m,坐标值采用通用值。
坐标的转换:由WGS-84的大地坐标转换为WGS-84的空间直角坐标,再转换为1954年北京空间直角坐标,最后转换为1954年北京大地坐标系见表2。整个系统采用高斯投影,采用七参数法计算两个坐标系的坐标,七参数法由三个坐标增量,三个坐标系旋转元素,一个尺度因子构成。七参数没有已知,则需要知道三个点在两个坐标系的坐标。
(三)控制网的设计方案
以D等点LXCQ1作为GPS控制网平面起算数据,以同等级扩展D等 GPS控制网,采用中点多边形的图形结构,用边连式的方法进行施测。[2]
边连式是通过一条公共边将两个同步图形之间连接起来。边连式布网有较多的重复基线和独立环,有较好的几何强度,平均边长2 Km。布设方案如图2所示。
(四)E等GPS平面控制网的布设方案
1.仪器设备:采用南方R70与南方S66接收机二台,静态平面精度5mm+0.5PPm,仪器均经国家授权鉴定单位检定合格。
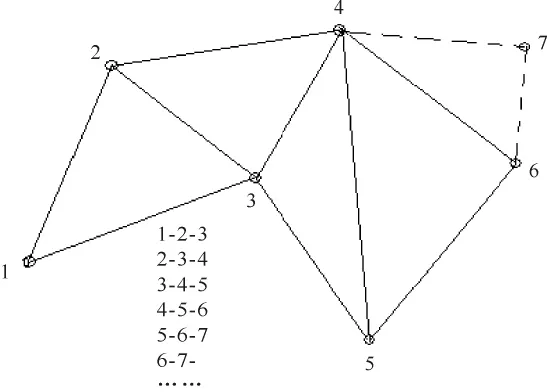
图2
2.测量布网:利用两台接收机为一组进行同步观测,以边连式组网。观测时段为二时段,每时段45-50min。观测期间接收机能观测到6颗以上有效卫星,GPS接收机观测数据接收及处理时卫星截止高度角设置为20°。
3.外业观测:严格按照《全球定位系统城市测量技术规程》进行测量作业。每日观测结束后,及时将观测手薄数据转存到计算机上,同时应进行当天的基线解算。观测手薄格式如表3所示。
GPS-E级网的主要技术要求应符合表4规定。

表3 观测手薄格式

表4 GPS网的主要技术要求①
(五)内业处理
内业数据处理流程:
数据传输→手簿输入→资料加工→资料预处理→基线解算→基线成果检验→重测与补测→WGS-84中经典自由网平差→网精度分析→北京54/80/地方独立中三维无约束平差→三维约束平差→二维平差。
1.基线解算:
XCQ12975-YCQ52974观测量L1同步时长55,历元间隔:30高度截止角:20.0
解算设置双差固定解为合格解。
成果表见表5。

表5
式中a(mm)为固定误差;b(ppm)为比例误差系数;d(km)为相邻点间的距离。根据上述公式计算出本次GPS网相邻基线中误差限差为σ=5.831mm。
2.同步环、异步环检验:
闭合环最大节点数:3
闭合环总数:118
同步环总数:92
异步环总数:26
同步环情况见表6。

表6
环中的点:CQ12 YCQ5 XCQ1
异步环情况见表7。

表7
环中的点:SSL2 SSL4 YCQ5
由同步环及异步环检验可知基线相对误差符合精度标准。
3.重复基线检验:
采取重复基线检验剔除误差超限、不合格的基线,剔除后独立环所含基线数仍能满足GB-T8314-2009全球定位系统测量规范要求,不需要重测或者补测,见表8。

表8
4.WGS84-坐标系下经典自由网平差平差结果三维自由网平差单位权中误差:0.020160 m基线及其改正见表9。

表9
平差后WGS84坐标和点位精度见表10。

表10
5.网精度分析
当前坐标系统:114
椭球长半径:6378245.000000
椭球扁率:1/298.3
控制等级E级-2009
投影比率M0=1.000000
投影高H=0.000
原点维度B0=0.000000000N
中央子午线L0=114.000000000E
北向加N0=0.000000
东向加E0=500000.000
采用网配合法进行转换见表11。

表11
二维平差
单位权中误差0.004780 m
平差后坐标和点位精度见表12。

表12
此次基线解算以双差固定解作为最终结果,双差固定解的可靠性由固定解的单位权中误差(Rms)做参考。由二维平差成果可知本次平差成果47个控制点的Rms最大值为1.8243,可见本次GPS静态平面控制网成果符合精度要求。
由于GPS测得的高程精度与水准测量的成果相比精度较低,且目前并没有规范明确规定GPS高程可代替水准测量高程,故本次测量不采用高程成果。
(六)误差分析
1.GPS的误差来源一般分为四类:
(1)与GPS卫星相关的误差:主要有钟误差、GPS卫星星历误差、卫星信号发射时的天线相位中心变化以及美国采用的SA技术。
(2)与信号传播相关误差:主要是电离层、对流层延迟,多路径效应。
(3)与接收机相关的误差:主要有接收机钟误差、接收机天线相位中线变化以及GPS仪器硬件和软件造成的影响。
(4)其他误差:主要是人为操作以及计算机处理过程中产生的误差。
本次测量过程中天气晴朗,有微风,地形开阔少行人干扰,误差较小。
2.针对GPS误差来源,可以采取以下几种方法减少误差:
(1)已知点检核比较法。在布设GPS静态控制网之前,用RTK抽取较多的点进行观测,把观测结果与抽测点的已知坐标或用全站仪测得的抽测点坐标进行对比,发现问题则立即改正。
(2)站址的选择上一是要选择在地理位置良好、通视良好、交通便利且控制点易于长期保存的地点来埋及安置仪器。二是测站要视野开阔、无障碍物以减少对卫星信号传播产生的干扰。三是要远离大功率无线电发射源。四是选择站点时要远离大面积水域、建筑物等信号反射物,以避免产生多路径效应。(3)利用未产生偏移的原有控制点标石,有利于在数据处理时选取多个已知点结算出两个以上的平差成果进行对比以选取最佳成果。
[1]李秀海,尚国学,杜国明.GPS工程控制网坐标系的选择和短边GPS高程精度分析[J].测绘工程,2003(2).
[2]庞瑞炎,严桂强.河道GPS平面控制网网形设计[J].珠江水运,2009(4).
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
导航定位学报(2022年1期)2022-02-17
矿产勘查(2021年3期)2021-07-20
全球定位系统(2021年1期)2021-03-26
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2017年4期)2017-11-23
电子制作(2016年1期)2016-11-07