面向欠采样公交GPS数据的信号交叉口延误估计
2014-05-14 03:07张志松
交通运输系统工程与信息 2014年2期
王 华,张志松 ,张 瞫,刘 昕
(哈尔滨工业大学 交通科学与工程学院 交通信息与控制工程系,哈尔滨 150090)
1 引言
交叉口是城市路网的重要组成部分,而车辆延误大多发生在交叉口,延误作为评价信号交叉口运行效率和服务水平的重要度量,不仅反映了驾驶员的不舒适性、车辆油耗和行驶时间损失,同时还反映了信号规划与设计的合理程度,因而延误是目前评价交叉口最为常用的指标.准确估算出车辆在交叉口的延误对改善交叉口运行状况、提高交叉口服务水平和整个路网的运行效率都有着重要的意义.
随着全球定位系统(Global Positioning System,GPS)的发展,其为估算信号控制交叉口延误提供了一种低成本、高效率的新方法.基于GPS数据估算信号交叉口延误也成为交叉口延误研究的一个新热点,如Quiroga等较早研究了利用连续GPS数据计算交叉口控制延误,通过GPS获取的速度信息和向前及向后加速度算法判断出控制延误过程中的关键点,从而计算出控制延误值[1].Joonho Ko等在此基础上进行了相关研究,用速度信息确定停车时间,用加速度信息确定延误过程减速开始和加速结束的关键点,并且指出了方法的局限性[2].Hellinga等利用公交车车辆自动定位系统和自动乘客计数系统来估算交叉口延误,由于数据的局限性,文章忽略了非停车延误,认为对交叉口延误起决定性作用的是停车延误,所以其方法只计算了停车延误[3].Hoeschen等认为单个信号控制交叉口的控制延误近似等于相邻两个交叉口之间的路段延误减去该路段上非信号控制引起的阻断延误.该方法证明要比直接用停车延误估算控制延误效果好,但是需要大量小采样间隔的数据[4].目前商用GPS最高能够提供的数据采样间隔为1s,1s采样间隔足够描述出车辆在交叉口的运行特性,为了能够准确找出延误过程速度或者加速度变化的关键点,上述基于GPS数据估算信号交叉口延误的研究均采用1s采样间隔的数据.数据来源多为现场实测数据,由于实测数据仍要耗费一定的时间和人力,所以数据所覆盖的交叉口数量,时间段均有限.
根据香农采样定理[5],为避免信息损失,所需采样频率必须是信号带宽的2倍以上,而对于低于信号带宽2倍的数据采样则称为欠采样,由此获得的数据称为欠采样数据.对于车辆在交叉口的运行过程而言,GPS数据采样率必须满足一定要求,才能避免车辆行车信息的损失.城市主干路设计速度为60 km/h,据调查,车辆在交叉口处减速停车及加速驶离过程平均加速度为1.5 m/s2.根据车辆运动学模型,减速或加速时间t=,车辆由60 km/h速度减速为0或由静止加速至60 km/h需要大约12 s,因此GPS数据采样间隔至少应小于12 s才有可能描述车辆的减速与加速过程.而实际车辆的运行速度要小于设计速度,而且在交叉口延误过程中有不完全停车情况,所以实际所需GPS数据采样间隔要远小于12 s.Joonho Ko等在对速度进行平滑处理的过程中证实,GPS数据采样间隔从1 s增加到10 s对控制延误的计算结果几乎没有影响[3],因而GPS数据采样间隔最大应为10 s.但是,较多城市中,如北京、上海、西雅图、首尔等大城市,公交车虽然配备有GPS系统,由于考虑到数据传输与存储成本及功能需求,公交车的GPS数据采样间隔多为30 s.在这种采样间隔的情况下,采样所得数据很难完整描述车辆在交叉口的运行过程,对于估算交叉口延误来说,其为欠采样数据.
由于欠采样公交GPS数据的局限性,很少被利用来估算信号交叉口延误.然而公交车GPS数据的时空覆盖性比较好,并且数据实时回传,利用好这些现有数据资源将在很大程度上提高交叉口延误的计算效率,降低计算成本,实现交叉口延误估计的实时性与广泛性.本文在研究欠采样公交GPS数据的基础上,通过对车辆在交叉口运行特性的分析,建立欠采样数据下车辆在交叉口的加减速模型,估算出延误值,并且在排除公交停靠站影响的情况下,利用交叉口直行方向公交数据对该方法进行验证.
2 车辆在交叉口运行特性分析与模型建立
2.1 交叉口控制延误
信号控制交叉口延误通常分为停车延误和控制延误两类.停车延误是指车辆停在交叉口处等待通行的时间,如图1中行驶距离为l2的时间段(t2-t3).控制延误是指车辆在驶近交叉口时,由于受信号控制的影响导致的所有车辆延误,包括减速延误(t1-t2)、停车延误(t2-t3)和加速延误(t3-t4).控制延误相对于停车延误更能反映车辆在交叉口受信号控制影响的全部延误过程,因此从1997年起,HCM手册引入控制延误作为交叉口延误的衡量指标[6].

图1 受阻滞车辆的行驶时间—距离曲线Fig.1 Schematic distance-time and speed-time diagrams depicting a vehicle delayed at a signalized intersection
根据HCM手册,控制延误包括减速延误da、停车延误ds和加速延误db,则控制延误的计算方法如下:
减速延误

停车延误

加速延误

控制延误

式中 t1为减速开始时间,单位为s;t2为停车开始时间,单位为s;t3为加速开始时间,单位为s;t4为加速结束时间,单位为s;vf为畅行车速,单位为m/s;da为减速延误,单位为s;ds为停车延误,单位为s;db为加速延误,单位为s.
计算控制延误的关键在于找到车辆经历延误过程中的关键点,即图1中t1、t2、t3、t4所对应的点.
2.2 欠采样GPS数据下车辆加减速过程建模
由于欠采样GPS数据的采样间隔大于正常数据采样间隔,车辆在交叉口的详细延误过程不能被详尽地描述出来,所以不能从欠采样数据直接获得关键点(t1、t2、t3、t4),因此无法通过欠采样的GPS数据直接计算出控制延误.

图2 欠采样GPS数据点在交叉口运行轨迹Fig.2 Sub-sampling GPS data points at signalized intersection
不失一般性地,假设公交车辆在交叉口的行驶状态如图2所示,图中点1-9对应欠采样GPS数据点,每两个数据点间的采样间隔为30 s.从图中可以看出,点2-3-4过程车辆有一个明显的减速过程,因而车辆在交叉口的减速过程主要发生在2-3区间;点5车辆停车等待通过交叉口,点6-7-8有一个明显的加速过程,因而车辆在交叉口的加速过程主要发生在7-8区间.因此点2-8涵盖了车辆在交叉口延误的具体过程,这一过程中只有2-8共7个数据点,不能详细描绘出车辆每1 s的速度与加速度变化过程,然而能够粗略描绘出包含真实延误过程的车辆运行过程.实际延误过程的始末点为图中方框中的点,对应时间分别为t1和t4,欠采样GPS数据所描述的延误过程始末点为图中圆框中的点,对应的时间分别为和.令tdy=-t1,tay=-t4,tdy段行驶距离为ldy,tay段行驶距离为lay,则实际控制延误为

式中 L为点2-8过程车辆行驶距离.
(1)减速模型.
车辆驶近信号交叉口如遇红灯或者排队状态会以变化的加速度进行减速行驶,并且加速度随着驶近交叉口的距离有一个转折变化过程[7],本文根据车辆在信号交叉口这一行驶特性,并充分利用GPS数据信息,建立分段变减速模型.在2-3减速区间内,车辆先匀速,后分别以恒定加速度a1、a2匀减速行驶.

式中 v1为2-3减速区间内点2的瞬时速度,v2为点3的瞬时速度,vm为2-3减速区间的平均速度,2-3减速区间行驶距离为L1,加速度变化点选为vm对应的点.
其速度—时间曲线如图3所示.

图3 欠采样数据下减速模型速度—时间关系图Fig.3 Relationship between speed and time in deceleration model based on sub-sampling GPS data
(2)加速模型.
同车辆驶近信号交叉口的行驶特性类似,车辆在驶离交叉口时,随着驶离交叉口的距离不断增加,行驶加速度同样有一个转折变化[7,8],因此本文兼顾欠采样GPS数据特点,建立分段变加速模型,将加速过程划分为三个过程,即在7-8加速区间内,车辆先分别以加速度a1、a2匀加速行驶,再匀速行驶.

式中 v1为7-8减速区间内点7的瞬时速度,v2为点8的瞬时速度,vm为7-8减速区间的平均速度,7-8减速区间行驶距离为L2,加速度变化点选为vm对应的点.
其速度—时间变化曲线如图4所示.

图4 欠采样数据下加速模型速度—时间关系图Fig.4 Relationship between speed and time in acceleration model based on sub-sampling GPS data
2.3 求解算法
从计算模型可以看出,上述方程组为带有约束条件的非线性不定方程组,方程组有无穷多解,为得到最优解,将其转化为带约束条件的非线性规划问题进行求解.以减速模型为例,算法如下:
对于2-3减速区间有

由此计算出减速区间内的匀速段时间tdy,相应得到匀速距离ldy.加速模型求解同理.
3 实验与分析
公交运行线路具有固定性、重复性等特点,尤其是对于城市的主干路来说,线网重叠率高,通过一个交叉口的公交线路一般大于10条;而且公交发车间隔短,高峰时期发车间隔为5-10分钟.因此一定时间段内通过同一个交叉口的公交车辆有很多,这就为计算交叉口的平均延误提供了可能性.本文随机选取北京市某一天中8:00-22:00的公交GPS数据作为计算数据.北京公交GPS数据的采样间隔为30 s,定位精度在10 m.
本文选取北京复兴门内大街与闹市口大街交叉口(闹市口)作为延误计算交叉口.闹市口东西向连接道路为双向10车道主干路,早7点到晚22点禁止左转.在实地调查的基础上获得了该交叉口实际交通运行状况,得到了车辆到达率、交通量、车型比例,以及平均车速、信号配时等数据.不失一般性的,畅行速度vf选交叉口路段的设计速度60 km/h.
本文首先根据实际调查数据,以HCM2000为计算模型,得到闹市口东西进口方向在11:30-12:00,以及12:00-12:30的延误值.在实测数据的基础上,利用VISSIM仿真,同样得到了该时段两个进口方向的延误值,结果如表1所示.

表1 公式计算和仿真延误值表Table 1 Control delay of using HCM delay model and VISSIM simulation
从表1中可以看出,二者的计算结果比较接近,由于时间与数据限制,本文并未得到实地交叉口延误调查值,而选择通过延误计算公式或者微观仿真结果代替交叉口延误真实值.HCM2000方法在计算国内信号交叉口延误时不太稳定,v/c比大于1.0时计算结果误差较大,而VISSIM以其能够细微调整仿真参数的优点,更适合于计算国内混合交通流条件下的信号交叉口延误,而且仿真结果与真实值相差甚小[7].因此本文选择VISSIM仿真得到的延误作为实际交叉口延误值.
采用本文提出的方法,计算半个小时东西方向通过该交叉口所有线路公交的延误,取平均值作为东、西进口道在该时段的延误,并将计算结果与VISSIM仿真结果进行了对比,如表2所示.

表2 计算结果比较Table 2 Delay comparison results
从表2中的结果可以看出,在东进口方向,本文所提方法估算出的延误值与VISSIM仿真结果相差不大,相对误差在15%以内,可以说明本文所提方法估算信号交叉口延误值具有可行性.
根据全天的公交GPS数据,以半小时为时间段,采用本文提出的方法计算出东西进口道的延误值如表3所示,其曲线如图5所示.

表3 分时段延误计算表Table 3 Control delay during 8AM to 22PM
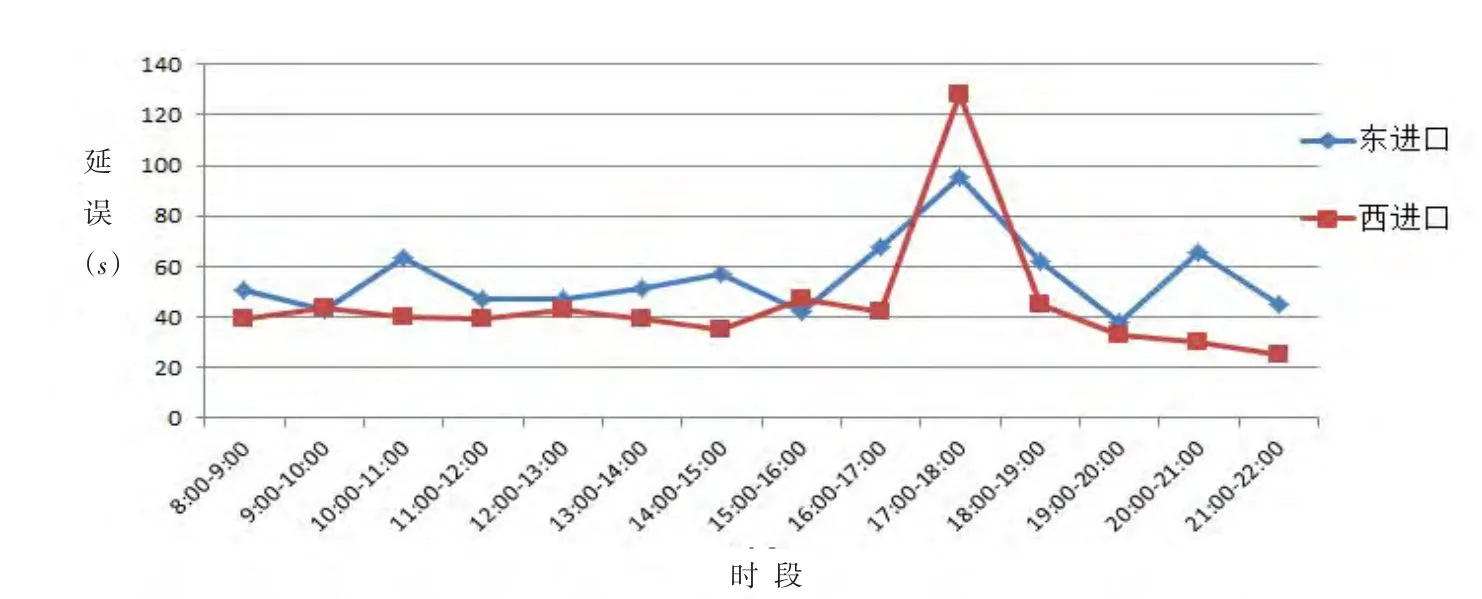
图5 闹市口东西向分时段延误图Fig.5 Control delay during 8AM to 22PM
从图5中可以看出,闹市口东西方向延误在平峰时段变化比较小,高峰时段迅速增加.以东进口为例,平峰时段延误一般维持在40 s左右,到晚高峰时,延误迅速增加到150 s左右,这种变化趋势符合交叉口一天的延误变化规律.
4 研究结论
本文提出了一种面向欠采样公交GPS数据计算交叉口控制延误的方法,通过对车辆在交叉口运行特性的分析,建立欠采样数据下车辆在交叉口的加减速模型,估算出延误值,经过实际应用证明了该方法的实用性与有效性.该方法充分利用现有的公交GPS数据,极大程度上节省调查和计算成本,尤其是在计算不同时段的延误时优势更为明显.该方法容易实现自动计算,结合实时回传的GPS数据能够得到交叉口的实时延误.
本文所提方法是针对直行车辆并且排除了交叉口附近有公交停靠站影响的基础上得到的,在以后的研究中将考虑交叉口左转、右转车辆延误情况,并且用充分的大样本数据验证算法,以进一步提高该方法的鲁棒性.
[1]Quiroga C,D Bullock.Measuring control delay at signal⁃ized intersections[J].Journal of Transportation Engi⁃neering,1999,125(4):271–280.
[2]Ko J,M Hunter,R Guensler.Measuring control delay components using second-by-second GPS speed data[J].Journal of Transportation Engineering,2008,134(8):338-346.
[3]Bruce Hellinga,Fei Yang,Jordan Hart-Bishop.Estimat⁃ing signalized intersection delays to transit vehicles[J].Transportation Research Record:Journal of the Trans⁃portation Research Board,2011,2259(1):158-167.
[4]Brian Hoeschen,Darcy Bullock,Mark Schlappi.Estimat⁃ing intersection control delay using large data sets of travel time from a global positioning system[J].Trans⁃portation Research Record:Journal of the Transporta⁃tion Research Board,2005,1917(1):18-27.
[5]胡广书.数字信号处理导论[M].北京:清华大学出版社,2005.[HU G S.Procession of digital signal[M].Beijing:Publication Company of Tsinghua University,2005.]
[6]Highway Capacity Manual[M].TRB,National Research Council,Washington,D.C.,2000.
[7]施晓芬.城市信号交叉口驾驶员速度控制和视觉搜索行为研究[D].西安:长安大学,2011:23-47.[SHI X F.Study on speed control and visual search of driving be⁃havior at urban signal intersection[D].Xi’an:Chang’an University,2011:23-47]
[8]陈振起.混合交通交叉口直行机动车运行特性分析与建模[D].北京:北京交通大学,2009:21-24.[CHEN Z Q.Analysis and modeling on characteristics of through vehicles’movement at signalized intersections with mixed traffic[D].Beijing:Beijing jiaotong University,2009:21-24]
[9]陈绍宽,郭谨一,等.信号交叉口延误计算方法的比较[J].北京交通大学学报.2005,29(3):78-80.[CHENG S K,GUO J Y,et al.Analysis and simulation on signal⁃ized intersection delay[J].Journal of Beijing Jiaotong University.2005,29(3):78-80]
猜你喜欢
今日农业(2021年8期)2021-07-28
数学小灵通(1-2年级)(2020年11期)2020-12-28
小学生学习指导(低年级)(2019年3期)2019-04-22
儿童故事画报·智力大王(2018年1期)2018-10-30
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17
中国房地产业(2016年2期)2016-03-01
系统工程学报(2015年3期)2015-02-28
读写算·小学低年级(2014年4期)2014-07-24
河南科技(2014年14期)2014-02-27
小雪花·成长指南(2009年10期)2009-12-04