
GE RX3i系统设计与虚拟对象应用第2讲 GE RX3i在机械手分拣装置虚拟对象中的设计
2014-07-11 08:57浙江工商职业技术学院李方园
自动化博览 2014年5期
浙江工商职业技术学院 李方园

1 引言
随着社会的不断发展,市场的竞争也越来越激烈,因此各个生产企业都迫切地需要改进生产技术,提高生产效率,尤其在需要进行物料分拣的企业,以往一直采用人工分拣的方法,致使生产效率低,生产成本高,企业的竞争能力差,物料的自动分拣已成为企业的最佳选择。
机械手自动分拣装置是一种高速自动化生产线上的金属与非金属自动分拣设备,其工作流程是物料盘负责输送物料,一旦有物料进入准备状态,则启动机械手搬运机构;然后机械手快速定位到物料的正上方,下降抓取物料、提升并释放至指定位置;待物料被释放后,传送装置联动,并根据金属与非金属的特点进行分拣;机械手则迅速返回,等待下一轮分拣抓取。
如图1所示为机械手自动分拣装置,它包括物料盘、机械手、输送带、金属和非金属通道等。根据工艺流程和控制要求设计该装置的PLC虚拟对象。

图1 机械手自动分拣装置
2 基于GE RX3i的虚拟对象开发
虚拟对象是采用计算机软件技术在特定设备中模拟实现真实的物体和环境, 用于解决不适合对真实物体或环境进行操作的问题。虚拟对象有着广泛应用,复杂程度也各不相同。当对象能实现各种功能,且对象内部之间有复杂的互相作用,我们也可称之为虚拟系统。
在GE 集成开发环境Proficy Machine Edition(简称PME)中,可以开发运行于PLC的逻辑程序,运行于PC的逻辑程序,运动控制程序和HMI(人机界面)程序等。HMI 程序运行于GE 的屏设备或通用计算机显示屏(如图2所示),因此,我们称之为View程序,这里研究的就是基于GE View 技术的虚拟对象开发。

图2 GE View与PAC RX3i的关系
对象由动画界面、动画控制程序和数据层组成。GE View提供了大量的通用控件,如按钮、开关、多边形等;专业的图形控件,如各种水管、阀门、锅炉等。也可根据需要导入自选图形和视频,因此,设计的动画图形仿真度高,专业性强。而且,其图形设计方式与各种组态软件,VB 图形界面相当类同,有相关软件使用经验的可迅速上手,设计对象图形界面极为方便快捷。
对象的动画控制程序可以用多种方式来实现,除了图形控件自带的属性变量,也可使用梯形图(Ladder)、顺序功能图(Sequential Function Block)、结构文本块(Structured Text Block)、功能块图(Function Block diagram)和更为强大的脚本语言。PME提供了两种Script语言:ViewScript 和VBScript。ViewScript是GE针对PMEView开发的专用脚本语言,语法类似VBScript,相比VBScript,其功能精简,入门容易,与PME的开发环境结合更好,提供了若干操作PME中控件的专用函数。VBScript作为一种通用的脚本语言,函数多,功能强大,适用性更为广泛。
数据层通过通讯驱动与控制层进行数据交换。GE考虑到控制系统可能由其它硬件厂商搭建的情况,在虚拟对象中可以选择相关业内著名自动化公司产品的硬件驱动,这样,就将控制对象与控制系统相分离,控制对象由GE PME 开发,运行于PC或GE View 显示屏,控制系统可由其他厂商产品组成。
3 机械手分拣装置的虚拟对象开发
机械手分拣装置的虚拟对象界面如图3所示,表1为GE View中的虚拟对象I/O清单。

图3 机械手分拣装置的虚拟对象

表1 GE View中的虚拟对象I/O清单
对于机械手分拣装置来说,非常重要的是定义流程中的各个限位。如图4所示为物料上升限位的颜色动画。

图4 物料上升限位
物料上升限位的动作脚本如下所示:

4 利用机械手虚拟对象进行程序开发
在虚拟对象的基础上可以进行机械分拣装置的程序开发,其工艺流程如下:
(1)按启动按扭后,启动送料电机驱动放料盘旋转,物料由送料槽滑到物料提升位置,物料检测光电传感器开始检测;
(2)送料电机运行一定时间后,如果物料检测光电传感器仍未检测到物料,则说明送料机构已经无物料,这时要停机并报警;
(3)当物料检测光电传感器检测到有物料,将发出信号,上料单向电磁阀驱动上料,机械手臂伸出手爪下降抓物,然后手爪提升臂缩回,手臂向右旋转到右限位,手臂伸出,手爪下降将物料放到传送带上;
(4)传送带输送物料,传感器则根据物料性质(金属和非金属),分别控制相应电磁阀使气缸动作,对物料进行分拣;
(5)最后机械手返回原位重新开始下一个流程。
在这里引入步序控制字的概念,具体如表2所示。
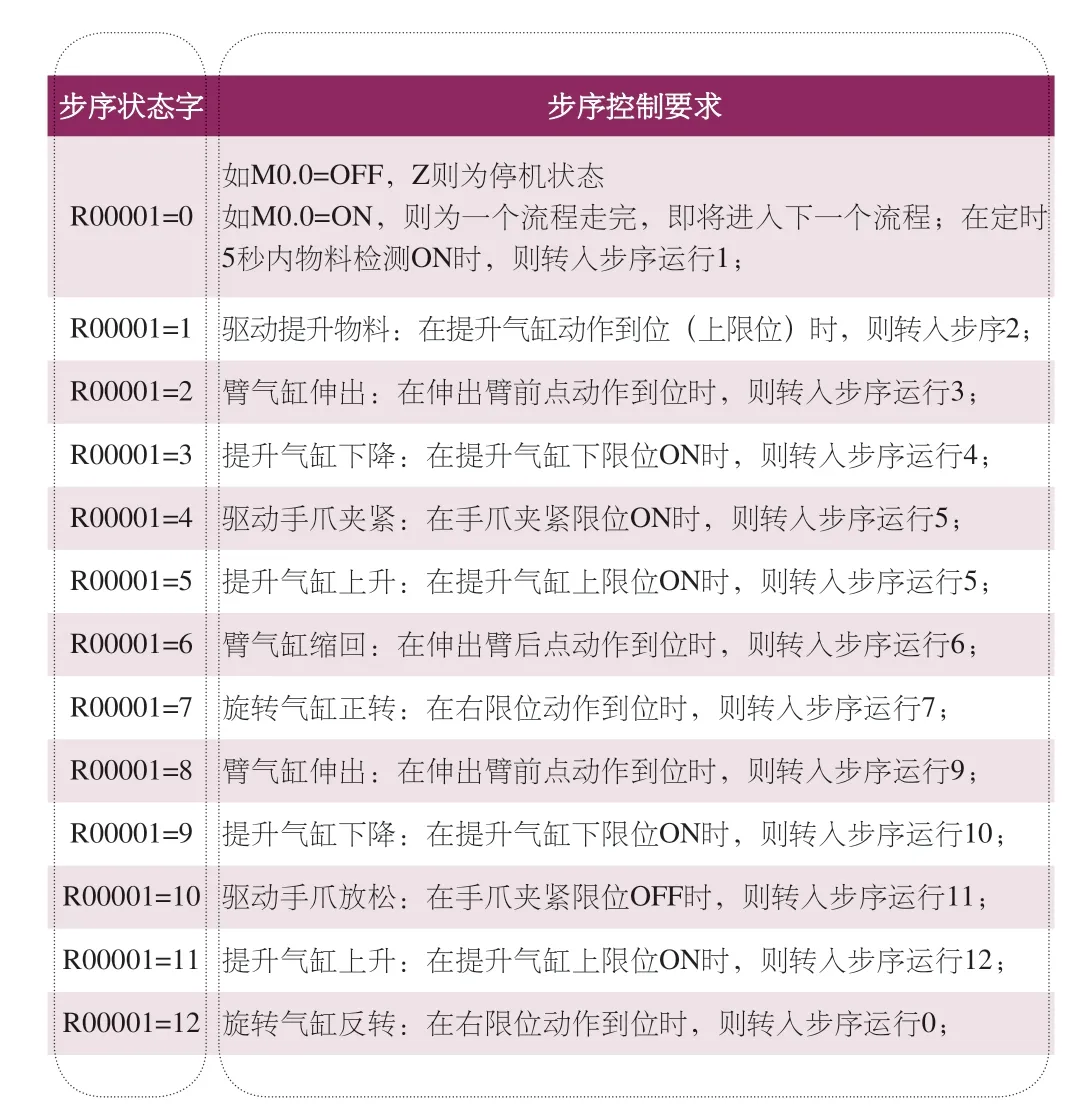
表2 步序控制字
机械分拣装置的部分程序如图5所示。

图5 机械分拣装置的部分程序
5 结语
虚拟对象的目的是替代实际物理对象,并且将对象的状态通过计算机技术表现,因此,它实际完成了物理对象和组态两者的功能。从数据通信上也可看到,在组态中,控制层从物理对象获得输入信号,并输出信号到组态;而虚拟对象与控制层有双向的数据交互,虚拟对象模拟实际物理对象产生状态数据,传输给控制层。因此虚拟对象设计的核心问题是如何模拟类似于实际物理对象的状态信号。
[1] 李方园. 自动化综合实践[M]. 北京: 中国电力出版社, 2009.
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
装备制造技术(2020年4期)2020-12-25
中文信息(2020年10期)2020-11-30
哈尔滨轴承(2020年4期)2020-03-17
电子制作(2019年13期)2020-01-14
软件(2018年7期)2018-08-13
猪业科学(2018年4期)2018-05-19
制造技术与机床(2017年8期)2017-11-27
制造技术与机床(2017年4期)2017-06-22
汽车零部件(2014年9期)2014-09-18
