
基于有限元的树木移植机铲刀挖掘力分析
2014-08-23 02:23孟兆新王亮亮范恒博
森林工程 2014年2期
孟兆新,王亮亮,范恒博
(东北林业大学 机电工程学院,哈尔滨 150040)
随着我国城镇化进程的不断加快,保证城市生态环境成为当今社会不可推卸的责任,而城市绿化又是城市生态环境建设的主要任务,针对城市环境的局限性,树木移栽成为了短时间内加速城市绿化水平的重要途径。以往,树木移植多以人工移栽为主,劳动强度大、生产成本高、生产规模小、移栽效率低、成活率也不高,因此机械化移植(特别是树木移植机的应用)就成为了高效的现代化树木移植技术亟需普及的树木移栽方式。
铲刀是树木移植机的重要组成部件,根据切削土壤的方式和结构,铲刀一般可分为U形铲、弧形铲和直铲,而直铲按照铲刀形状又分为菱形(曲面)铲和V字形铲等[1-2]。本文对直铲式菱形铲刀切削土壤过程受力情况进行理论分析,利用ANSYS/LS-DYNA软件模拟铲刀切削土壤的动态过程,分析切削土壤过程中土壤的应力变化及铲刀切削阻力的变化情况,目的是为了减少切削阻力,寻找较优的铲刀结构。
1 树木移植机的基本结构与工作原理
图1为四瓣式菱形铲刀组结构示意图,主要由:1悬挂架、2固定架、3开合油缸、4开合架、5定位套座、6定位油缸、7移动导轨、8铲刀、9导轨架和10固定导轨组成。
树木移植机工作时,通过液压装置开启导轨架开闭锁,前移使苗木位于铲刀中央,闭合铲刀组;控制液压油缸使铲刀依次入土挖掘苗木,将苗木与土壤分离;操纵悬挂机构提升铲刀组及被土球包裹的苗木;将机器驶离挖掘点,卸下苗木,进行下一次作业。
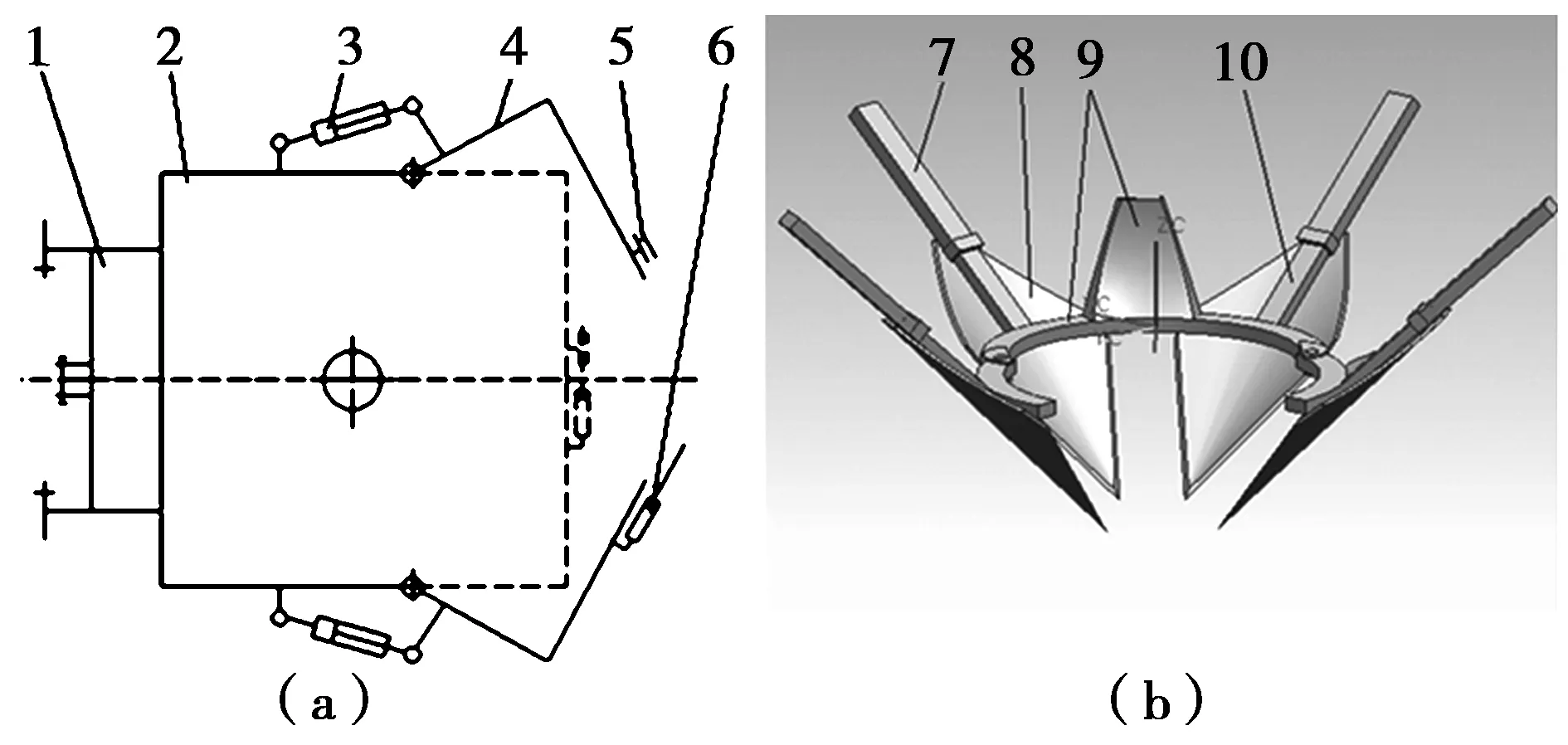
图1 四瓣式菱形铲刀组结构示意图
2 铲刀切削土壤过程受阻力理论分析
树木移植过程中土质条件多变且较为复杂,切削过程中的阻力主要有切入土壤时的切削阻力、土壤摩擦阻力、切削树木根茎时的切断阻力以及土壤中碎石对铲刀的阻力等。
铲刀与所切削的土壤间的相互作用力F:
F=Fu+Fv+Fa。
(1)
式中:Fu、Fv和Fa分别为铲刀下铲的过程中的位移、速度以及加速度产生的相互作用力。铲刀下铲速度一般较低,近于匀速,由此在考虑所受阻力时,忽略惯性力Fa的影响[3]。菱形铲刀参数如图2所示。
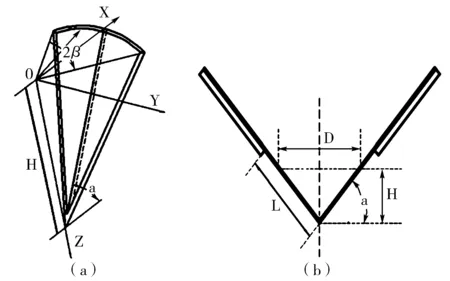
图2 菱形铲刀参数示意图
由于铲刀受阻力情况较为复杂,且当铲刀在切削土壤时克服阻力,会发生变形应力分布情况复杂,另外,受土壤力学研究水平限制,传统理论方法并不能完全求解铲刀工作时所受阻力。因此,理论计算通常采用以相似理论为基础的模型试验建立下面的铲刀切削阻力经验公式[4]:
F=0.130 7X1.138 4·γ0.755 3·C0.2 447(13.927 5+0.563 3×100.024 3β)(kN)。
(2)
式中:X为铲刀切削位移量m;γ为土壤容重,g/cm3;C为土壤内聚力Pa;β为铲刀围角的半角,°。
(3)
3 铲刀切削土壤过程的虚拟仿真分析
3.1 菱形铲刀及土壤有限元模型的建立
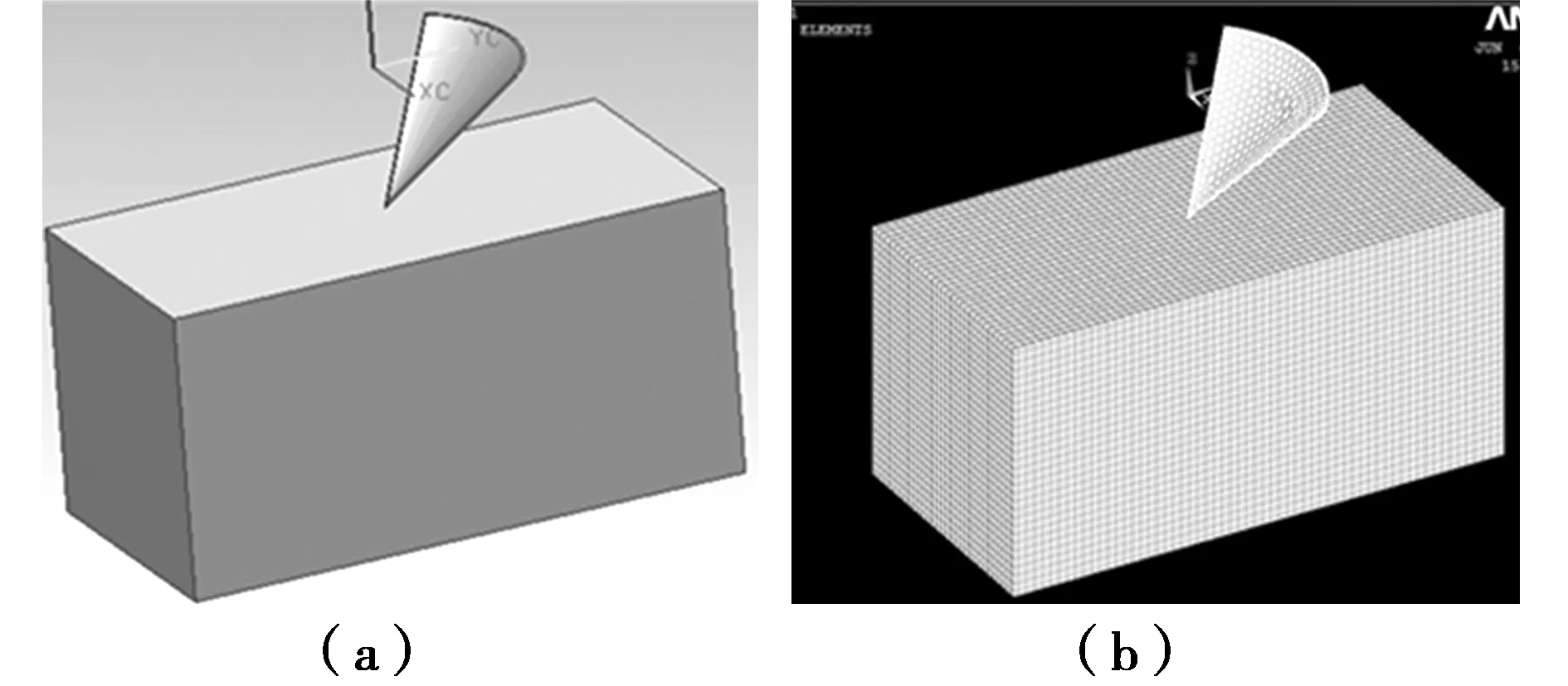
图3 菱形铲刀与土壤模型
在UG中建立菱形铲刀及土壤三维模型,如图3(a)所示。铲刀组采用四瓣式,即铲刀围角d的半角,β=45°,H=100,a=45°,铲刀厚度为1.4。
运行ANSYS12.0,导入已完成的三维模型。单元类型选用3D solid164单元,铲刀材料设定为线弹性材料 “Elastic”模型,材料参数依次输入:密度为7.8、弹性模量为EX=2E12、泊松比为0.3(本文采用g-cm-s单位制)。
由于土壤具有松散、多相、高度非线性等特点,属于应变硬化和软化的弹塑性材料[5-7],因此在LS-DYNA中选用“SOIL_AND_FOAM_FAILURE”材料模型。部分土壤参数见表1,其他土壤参数根据LS-DYNA971关键字手册中的*MAT_FHWA_SOIL模型设定。
表1 部分土壤参数
网格划分时,对铲刀采用智能网格划分方式,对土壤采用手动控制线条单元个数的方法划分,如图3(b)所示。对土壤底面自由度全约束,侧面采用无反射边界条件约束。
在LS-DYNA中选择面面接触的侵蚀分析,设定ESTS-Eroding类型(当单元可能失效时所用的接触,目的是在模型外部单元失效被删除后,剩下的单元仍考虑接触)。
3.2 铲刀切削土壤虚拟仿真与结果分析
铲刀以切削角45°、v=0.2 m/s匀速切削土壤,其切削过程仿真如图4所示。
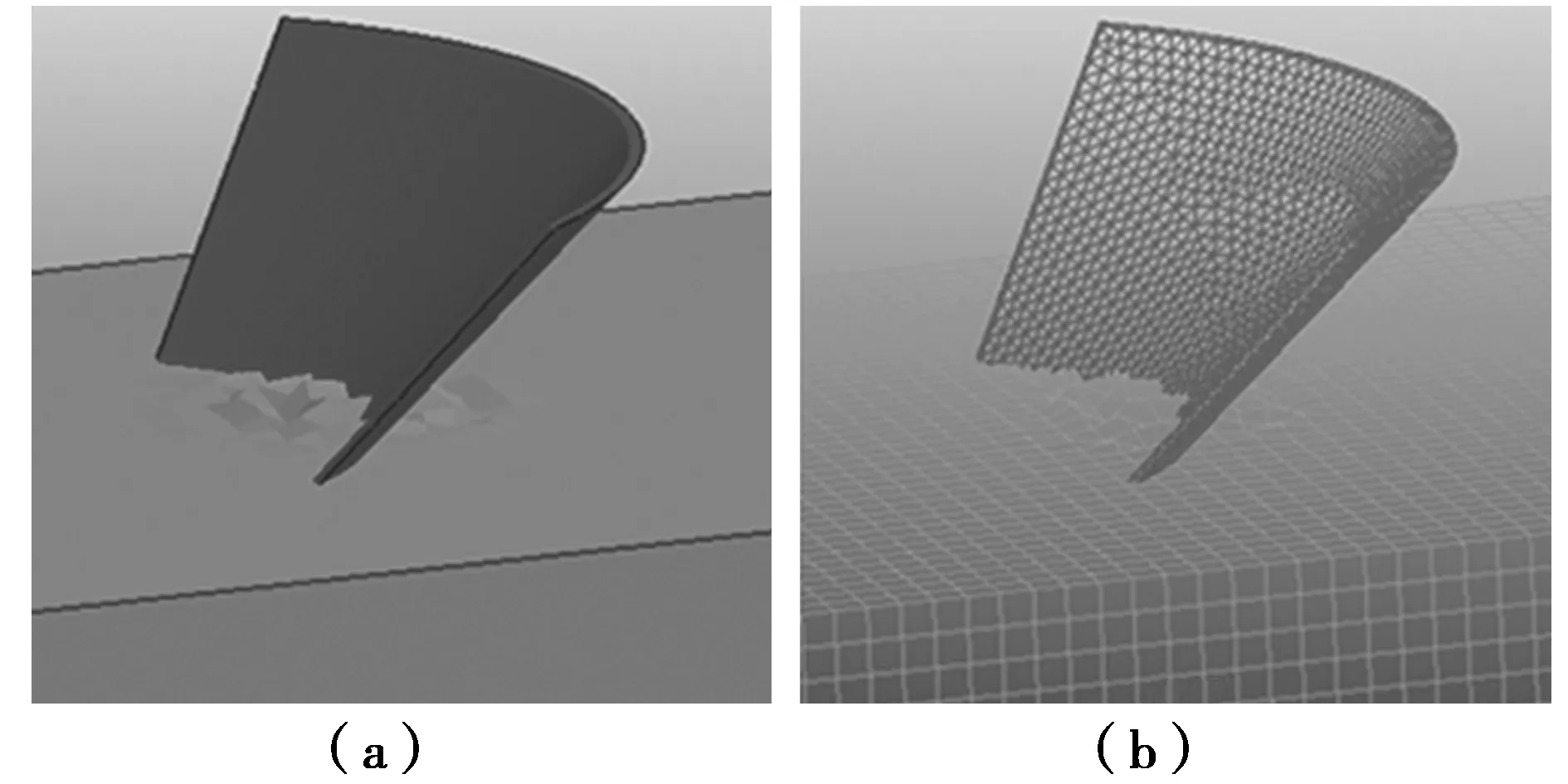
图4 铲刀切削土壤过程仿真
3.2.1 切削过程中应力分析
铲刀以切削角45°匀速切削土壤,在0 s时与土壤接触,尖端首先接触土壤,之后随着铲刀与土壤接触面积逐渐增大,在铲刀的剪切和挤压作用下,部分与铲刀直接接触的土壤单元被破坏,变形失效[8-9]。
通过后处理器LS-PREPOST查看结果,如图5所示为不同时刻土壤的von mises stress分布图。土壤的等效应力集中在刀具的刃口上部,而不是在刃口处,铲刀切削过程中土壤沿刀面向上滑动,同时土壤受到前方和上部土壤压力及刀具的挤压促使土壤应力集中在刃口上部。
3.2.2 切削过程铲刀受力分析
铲刀以切削角切削土壤过程中所受土壤反作用力随时间变化曲线,如图6所示。铲刀在0 s与土壤接触后,开始受到土壤反作用力,约4.10 s时土壤瞬时反作用力达到最大值0.409 kN。通过数据分析,求解出切削过程受到土壤的平均反作用力约为0.223 kN。
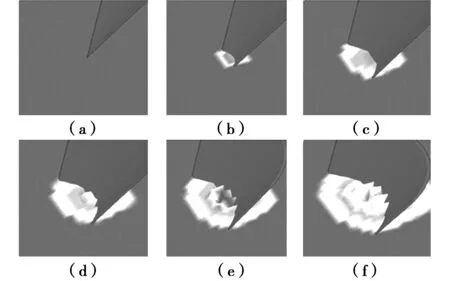
图5 土壤von mises stress分布情况
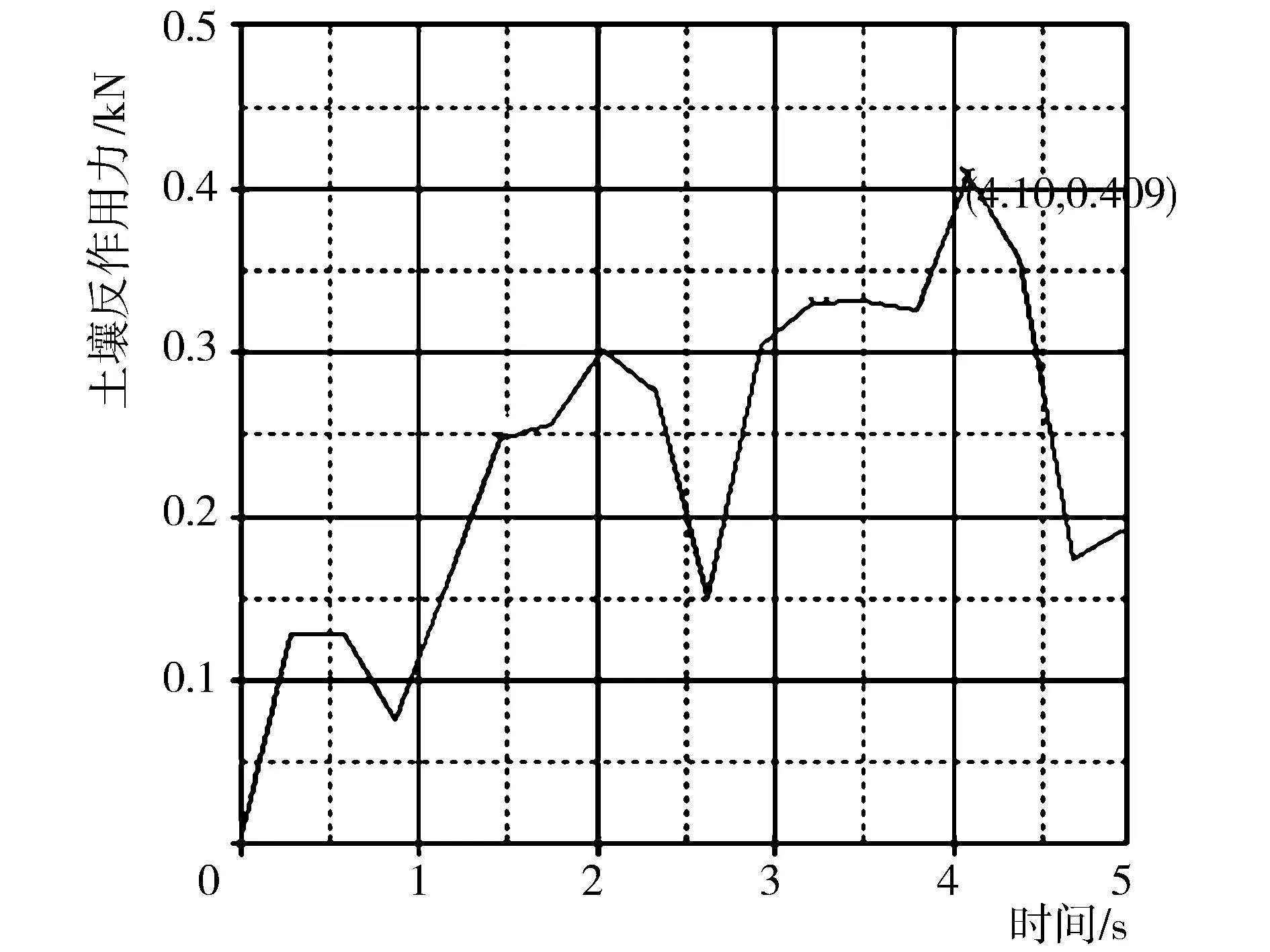
图6 切削角45°时铲刀所受力
同理,在其他条件不变的情况下,只改变铲刀切削角度,分别求解铲刀切削角度为30°、35°、40°、50°、55°、60°和65°时铲刀所受土壤反作用力,整理结果见表2,相应折线图如图7所示。
由表2和图7可知,当切削角度为65°时,铲刀受到土壤最大瞬时反作用力值最小,且平均反作用力最小;当切削角度为30°时,铲刀受到土壤最大瞬时反作用力值最大;当切削角度为30°时,铲刀受到土壤平均反作用力值最大。根据上述虚拟仿真结果图表,针对不同实际情况,可对铲刀的初步设计提供理论依据。

表2 不同切削角度受力情况
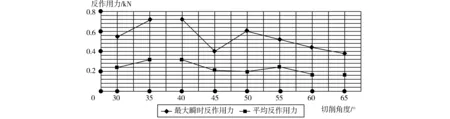
图7 不同切削角度受力情况
4 结束语
结合UG、ANSYS/LS-DYNA软件,完成了铲刀切削土壤的三维模型及有限元建模,并在ANSYS/LS-DYNA中定义了带失效的土壤材料,构建了铲刀与土壤相互作用的虚拟仿真模型。
利用该模型模拟分析了铲刀切削土壤的动态过程,通过LS-PREPOST后处理器,得到了土壤被切削过程中的应力变化情况,以及铲刀受到土壤反作用力随时间的变化情况,并对不同铲刀切削角度受反作用力进行对比,为初步确定铲刀的结构参数及进一步优化提供了理论依据。
由于在现实中土质情况较为复杂,土壤中的树木根系、碎石等都会对铲刀切削产生影响,另外土壤条件也会随着深度变化而变化,因此对于多物质耦合以及分层模拟的研究值得进一步探讨。
【参 考 文 献】
[1] Lemar Tree Spades[EB/OL].http:/ /www.lemarweb.com/site/.
[2] Dutchman Truck Spade[EB/OL].http://dutchmasternurseriesltd.com/.
[3] 宋海兵,王春宏.树木移植机下铲过程土壤与铲刀接触受力分析[J].林业机械与木工设备,2013(2):42-44.
[4] 张英彦,顾正平.直铲式树木移植机下铲阻力的探讨[J].北京林业大学学报,1988,10(2):38-45.
[5] 周 明,张国忠,许绮川,等.土壤直角切削的有限元仿真[J].华中农业大学学报,2009,28(4):491-494.
[6] 马爱丽,廖庆喜,田波平,等.基于ANSYS/LS-DYNA的螺旋刀具土壤切削的数值模拟[J].华中农业大学学报,2009,28(2):248-252.
[7] 杨桂通.土动力学[M].北京:中国建材工业出版社,2000.
[8] 尚小江.ANSYS LS-DYNA动力分析方法与工程实例(2版)[M].北京:中国水利水电出版社,2008.
[9] 李 滨,谭敏尧.平模杨型机压辊的特性分析[J].森林工程,2013,29(3):93-95.
猜你喜欢
重庆交通大学学报(自然科学版)(2022年3期)2022-04-21
成都信息工程大学学报(2021年3期)2021-11-22
阅读(科学探秘)(2020年11期)2020-12-28
机械工程师(2020年3期)2020-03-27
筑路机械与施工机械化(2018年11期)2018-11-29
课堂内外·教师版(2017年12期)2018-01-19
科学中国人(2016年35期)2016-01-28
意林(2008年12期)2008-05-14
意林(2008年14期)2008-05-14
意林(2008年10期)2008-05-08
