3UPS-S并联机构单支链驱动奇异分析
2014-12-19 08:58韩先国刘岩龙
北京航空航天大学学报 2014年1期
韩先国 刘岩龙
(北京航空航天大学 机械工程及自动化学院,北京100191)
随着并联机构理论研究的发展与成熟,并联机构的应用领域越来越广泛,包括并联机床[1-2]、并联转台[3]、装配对接机构[4-5]等.并联机构是一种由多个并行支链构成的闭环系统,与传统串联机构相比,具有高刚度、高精度、高承载能力、结构简单等优点[6-7].
然而并联机构也有缺点,奇异问题就是广泛存在于并联机构中的一个固有难题,常见的有工作空间的位姿奇异和边界奇异[8].当并联机构发生位姿奇异时,锁定所有支链的驱动,动平台仍具有一个特定的瞬时螺旋运动,并联机构会发生失控的危险;当发生边界奇异时,并联机构会失去某个方向的运动自由度,此时无论多大的输入驱动,都不能使动平台产生运动,并联机构到达位姿空间边界.
目前已经有大量文献研究了工作空间的奇异问题[9-10],但已有的研究成果主要是从动平台工作空间来分析奇异问题,很少有文献从并联机构支链的输入空间对奇异问题进行研究.因此本文通过对3UPS-S并联转台单支链驱动问题进行分析,研究了并联机构的输入空间奇异问题,发现单支链驱动奇异即为位姿奇异,给出了并联机构输入空间边界的定义,最后确定了并联机构单支链归零的一般策略.
1 问题提出
为实现空间3自由度的转动功能,设计了一种3UPS-S并联转台,用于运动姿态模拟,其结构形式如图1所示.该机构由动平台、静平台、中间支撑立柱和3个UPS支链组成,支链与静平台通过虎克铰U连接,与动平台通过球铰S连接,支链中间有移动副P.支撑立柱与动平台通过球铰连接,与静平台固连.
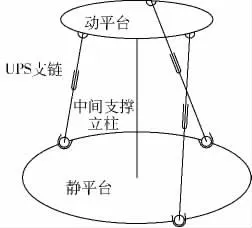
图1 3UPS-S并联转台原理图
给定动平台的目标位姿,利用位置反解算法可以得到各支链的驱动杆长,通过驱动3个支链的移动副,改变支链杆长,对动平台进行运动控制;已知各支链杆长时,利用位置正解算法可以求出动平台的位姿角,再进行驱动控制.但是当遇到突发情况,比如突然断电,系统重启后,丢失支链杆长值信息,又没有动平台的位姿角度,无法对并联转台进行运动控制.
发生这种情况时,需要进行各支链归零,就是使支链回到初始杆长.在支链移动副中有零位开关,驱动支链伸缩到达零位开关,就实现了支链归零.目前的归零方法是固定2个支链杆长不变,单独对第3个支链杆长进行调整,多次调整单支链杆长完成归零.这种调整方法存在问题是,当固定2个支链杆长时,第3支链杆长无法实现全行程,在运动到某个杆长值后受到系统结构约束就无法再驱动,下面分析产生这种问题的原因.
2 单支链驱动的运动分析
2.1 利用旋量互易积求解动平台角速度
在并联机构动平台处于某个位姿时,固定2个支链杆长不变,分析第3个支链以及动平台的运动特点,如图2所示.
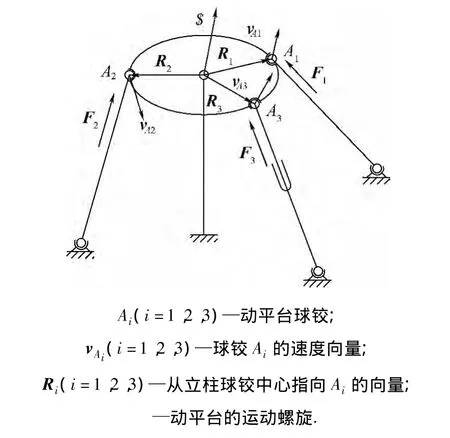
图2 并联机构单支链运动分析
支链对动平台的作用力为 Fi(i=1,2,3),对动平台中心取矩为Ri×Fi,则支链对动平台的力矢为(Fi,Ri× Fi),改写为 fi(li,Ri× li),其中 fi表示支链力数值,li表示支链方向向量.动平台转动角速度为ω,由于中间支撑立柱的约束,不能移动,因此动平台的运动螺旋可表示为 =(ω,0).
支链1和支链2杆长固定,其支链力矢只对动平台产生约束作用,对动平台运动螺旋做功为零,因此支链1和2力矢与动平台运动螺旋互易积为零,即

展开为

支链力不为0,将上式化简为

即

该齐次线性方程组只有2个方程,求解动平台角速度向量ω会有无穷多解,取其模长为1的基础解ω0作为动平台角速度方向向量.
接下来可以求出球铰A3的速度方向向量

将vA3向支链3投影,得到沿支链轴向驱动速度:

该投影值v3的物理含义为:动平台的速度矢量模长为1时,支链3需要的驱动速度值.当支链3轴向速度v3≠0时,支链3可以伸缩运动;如果v3=0,则球铰速度vA3垂直于支链l3,支链3不能进行伸缩运动,即支链3受到结构约束无法驱动.
2.2 计算实例
将上述分析结果应用于3UPS-S并联机构,动平台的工作空间用ZXZ欧拉角描述,具体为进动角 ψ =0~360°,章动角 θ=0~54°,自旋角 φ =-ψ,反解计算出3个支链的行程:
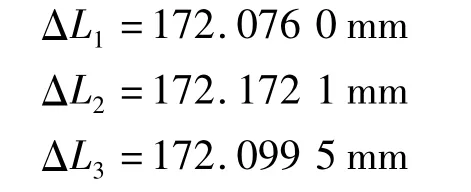
各支链的零位姿初始杆长值分别为
使支链1和2保持零位姿杆长值,支链3杆长为
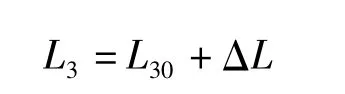
其中ΔL表示支链3杆长变化量,其取值范围为-86~86 mm,即动平台实现工作空间时支链的全行程.进行支链3轴向速度计算的流程图如图3所示.
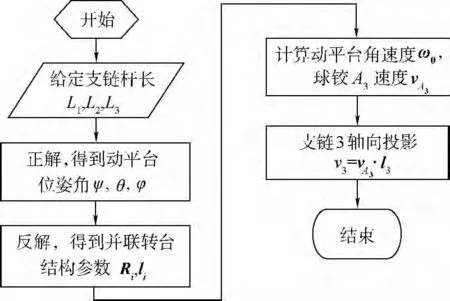
图3 计算流程图
从图4的曲线可知,当支链3杆长变化量为-28 mm时,支链3的轴向驱动速度v3=0,此时支链3不能再进行驱动,因此支链3可驱动的杆长变量范围为-28~86 mm.
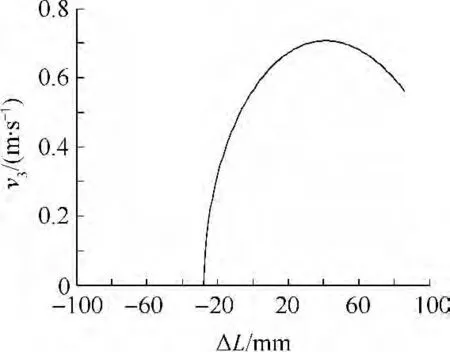
图4 支链3球铰速度方向向量沿支链轴向分量
2.3 单支链驱动特点
固定3UPS-S并联转台的2个支链,只对第3个支链进行驱动时,由于结构限制,其驱动范围具有边界,小于整个运动行程,单支链驱动杆长不能任意取值.
3 单支链驱动边界时的奇异分析
3.1 单支链驱动奇异与位姿奇异的关系
并联转台进行单支链驱动到达边界时,机构不能正常运动,将这种现象称为支链驱动奇异.为了分析并联机构发生驱动奇异时的约束情况,以图5所示的单支链运动机构进行说明.

图5 单支链运动机构
图5的单支链运动机构中,连杆在驱动支链的伸缩杆作用下绕立柱固定点转动.当连杆旋转到与驱动支链共线时,驱动支链不能再伸长,杆长到达边界.此时支链的驱动力与立柱约束力共线,发生线性相关,支链不能再驱动.
同理,当并联转台的单支链运动到达边界时,该支链受到结构约束而不能再驱动,说明此时并联机构已具有沿第3支链方向的约束,第3支链与其他2个支链的约束产生线性相关.
并联转台的3个支链发生线性相关后,必然有1个支链的约束不起作用,系统的有效约束只剩下2个自由度,而动平台具有3个运动自由度,并联转台处于欠约束的状态下,整个机构位于奇异位姿.
因此可以判定并联机构单支链驱动到达边界时,并联机构发生位姿奇异,即单支链驱动奇异就是位姿奇异.
3.2 并联机构输入空间边界定义
在单支链驱动到达边界时,并联机构发生位姿奇异,其雅可比矩阵降秩,3个支链线性相关.对并联机构此时的速度关系进行分析.
式(7)中的系数矩阵即为雅可比矩阵,记为J,由式(7)可得

其中Ji表示雅可比矩阵的第i行.在奇异位姿处,雅可比矩阵的各行线性相关,因此有

其中k1和k2表示常系数.将式(9)代入式(8)可得


化简为即支链3的驱动速度与支链1和2的驱动速度相关.此时并联机构各支链的速度不能独立取值,各支链到达了位置空间边界.
从以上分析可以定义并联机构的输入空间边界:当并联机构发生位姿奇异时,各支链线性相关,支链驱动速度也线性相关,有一个支链的速度不能独立输入,从而使得输入向量降维,在该点处支链输入空间到达边界.
因此,当并联机构到达输入空间边界时,单支链发生驱动奇异,引起了各支链线性相关,并联机构处于奇异位姿.
4 单支链归零策略
3UPS-S并联转台进行支链归零时,应使并联机构尽量避开奇异位姿,远离输入空间边界.根据文献[11]研究,在靠近工作空间零位姿处,并联机构不容易发生奇异.因此通过单支链调整,使动平台接近工作空间零位姿,来达到支链归零的目的.
在任意位姿下,3UPS-S并联转台3个支链的最长杆与最短杆差值越大,动平台的位姿角就越大.因此可以先将3个支链中的最长杆缩短,再将最短杆伸长,使3个支链杆长接近,这样就可以远离奇异位姿和支链杆长边界.
在进行支链杆长调整时,不能一次对某个支链进行大范围调整,而应按照少量多次的原则,每次对最长杆和最短杆调整较小的长度,分多次完成调整,才能避免单支链驱动到达输入边界.
这种单支链归零策略在实际应用于3UPS-S并联转台后,可以取得较好的位姿调整效果,能够使并联转台各支链顺利回到零位置.
5 结论
1)并联机构进行单支链驱动具有边界,杆长不能任意取值;
2)并联机构的输入空间驱动奇异就是工作空间位姿奇异,此时并联机构到达输入空间边界;
3)并联机构单支链驱动归零策略为:先将各支链中的最长杆缩短,再将最短杆伸长,并且分多次调整支链杆长,每次调整较小幅度.
References)
[1]Chanal H,Duc E,Ray P,et al.A new approach of the geometrical calibration of parallel kinematics machines tools based on the machining of a dedicated part[J].International Journal of Machine Tools and Manufacturing,2007,47(7/8):1151-1163
[2]Daniel K,Philippe W,Damien C.Kinematic analysis of a serialparallel machine tool:the VERNE machine[J].Mechanism and Machine Tool,2009,44(2):487 -498
[3]魏敏和,韩先国,张军.3-UPS/S并联转台球铰链的优化研究[J].航天制造技术,2011(3):19 -23 Wei Minhe,Han Xianguo,Zhang Jun.Optimization research of spherical joints in 3-UPS/S parallel rotational table[J].Aerospace Manufacturing Technology,2011(3):19 - 23(in Chinese)
[4]熊涛.卫星自动对接技术研究[J].航空制造技术,2011(22):36-39 Xiong Tao.Automatic docking technology of satellite[J].Aeronautical Manufacturing Technology,2011(22):36 -39(in Chinese)
[5]曲艳丽,赵明扬,张崇峰.空间对接机构缓冲系统及其运动学建模[J].上海航天,2002(1):13-16 Qu Yanli,Zhao Mingyang,Zhang Chongfeng.Damping mechanism for space docking and its kinematics modeling[J].Aerospace Shanghai,2002(1):13 - 16(in Chinese)
[6]温兆麟,陈新,敖银辉,等.并联机构应用的领域及其构型研究[J].机床与液压,2005(5):6-9 Wen Zhaolin,Chen Xin,Ao Yinhui,et al.Application area and structure study of parallel mechanism[J].Machine Tool& Hydraulics,2005(5):6 -9(in Chinese)
[7]Cha S H,Lasky T A,Velinsky S A.Determination of the kinematically redundant active prismatic joint variable ranges of a planar parallel mechanism for singularity-free trajectories[J].Mechanism and Machine Theory,2009,44(5):1032 -1044
[8]曹永刚,张玉茹.6-RSS型并联机构奇异性分析[J].机械工程学报,2008,44(6):79 -87 Cao Yonggang,Zhang Yuru.Singularity analysis for 6-RSS parallel mechanism[J].Chinese Journal of Mechanical Engineering,2008,44(6):79 -87(in Chinese)
[9]Sandipan B,Ashitava G.Analysis of configuration space singluarities of closed-loop mechanism and parallel manipulators[J].Mechanism and Machine Theory,2004(39):519 -544
[10]Fang Hairong,Fang Yuefa,Zhang Ketao.Reciprocal screw theory based singularity analysis of a novel 3-DOF parallel manipulator[J].Chinese Journal of Mechanical Engineering,2012,25(4):647-653
[11]韩先国,陈五一.利用位置正解分析并联机构奇异分布规律[J].自然科学进展,2005,15(5):631 -635 Han Xianguo,Chen Wuyi.Analysis of the rule of singularity in parallel mechanism via the forward displacement solution[J].Process in Natural Science,2005,15(5):631 - 635(in Chinese)
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
农业机械学报(2021年10期)2021-11-09
现代信息科技(2020年22期)2020-06-24
浙江海洋大学学报(自然科学版)(2020年5期)2020-06-19
电子技术与软件工程(2019年6期)2019-04-26
北京航空航天大学学报(2019年3期)2019-04-08
电子制作(2019年23期)2019-02-23
科技与创新(2018年12期)2018-06-22
消费导刊(2018年8期)2018-05-25
燕山大学学报(2015年4期)2015-12-25