带移动滑块太阳帆航天器姿态控制技术研究及仿真
2014-12-31 11:58张震亚韩艳铧
上海航天 2014年5期
张震亚,韩艳铧,贾 杰
(1.南京航空航天大学 航天学院,江苏 南京 210016;2.南昌航空大学 信息工程学院,江西 南昌 330063)
0 引言
太阳帆作为一种全新航天器推进机构,由于无需消耗任何化学燃料和能源即可在太阳光压持续推进下实现高速飞行,成为近年来航天领域的研究热点[1]。因装配误差及帆面变形等因素,太阳帆光压压心往往不与系统质心重合,光压会对太阳帆产生远大于传统航天器的姿态干扰力矩[2]。同时由于太阳帆结构尺寸庞大,其三轴转动惯量远超过普通航天器(美国ATK研制的160m级,440kg方形太阳帆航天器的滚转轴惯量达642 876kg·m2,俯仰轴和偏航轴惯量均为321 490kg·m2[3]。),若采用飞轮或反作用喷嘴等传统执行机构对其姿态进行控制,则需消耗大量能源或工质。因此必须设计新型高效率、无工质消耗的姿控系统,常用方法是利用转动控制杆或沿帆面结构杆滑动的质量块等机构,使太阳帆的质心相对压心位置产生可控偏距,获得光压姿态控制力矩[4-6]。
与采用控制杆或控制翼面的姿态控制方案相比,基于移动滑块的太阳帆姿态控制方案可保证有效载荷与帆面相对位置固定,利于实现天体定向观测和对地稳定通信,且执行机构的物理结构简单,可靠性高,输出控制力矩较大,能满足太阳帆大角度快速机动的姿态控制需求[7]。为此,本文对基于移动滑块的太阳帆航天器姿态控制方案进行了研究。
1 系统动力学建模
带移动滑块的太阳帆航天器结构如图1所示。其姿态控制基本原理为:在太阳帆航天器的4根结构杆上装载可沿杆作受控滑动的质量块,理想初始状态下太阳帆质心与太阳光压压心重合,此时太阳光压对航天器无力矩作用;通过调整滑块位置可改变系统质心位置,使系统质心与光压压心间产生可控偏距,形成所需光压姿态控制力矩。
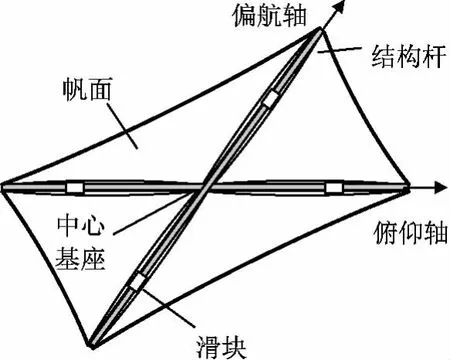
图1 太阳帆航天器物理结构Fig.1 Structure of solar sail spacecraft
为简化模型推导过程,建模阶段将沿同对角线两根结构杆滑动的双滑块等效为可沿全对角线移动的单滑块。
1.1 坐标系和符号定义
惯性坐标系O-XY:原点O为空间某一固定点;OY轴正向与太阳光单位矢量S相反;OX轴正向与垂直太阳光单位矢量S⊥方向相同。
与太阳帆航天器固连的体坐标系Os-XsYs:原点Os为太阳帆本体质心;OsYs、OsXs轴分别指向太阳帆帆面法向与切向方向,如图2所示。
定义太阳帆本体(含中心基座和结构杆)质量为ms,本体偏航转动惯量为Js;移动滑块质量为mp,视其为质点;滑块初始时刻静止在本体质心Os处,在方向沿结构杆的电机驱动力f作用下作可控滑动,滑块沿导轨位移为l,忽略滑块与导轨接触面间的摩擦力;帆面法向与OY轴夹角为偏航姿态角α。因太阳帆制造装配误差和帆面变形等因素,太阳帆光压压心Op与本体质心Os并不重合,质心与压心间存在偏差小量d。
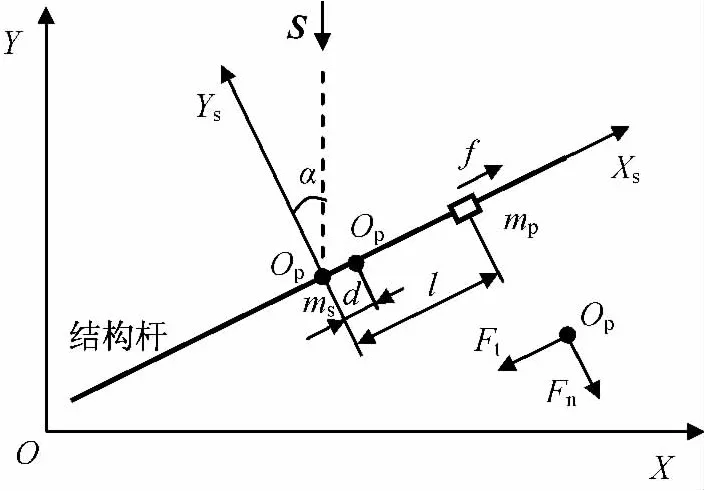
图2 太阳帆航天器偏航轴简化结构Fig.2 Yaw-axis simplified structure of solar sail spacecraft
1.2 太阳光压模型
太阳光压模型可表示为

式中:PAU为距离太阳1个天文单位处光压压强;As为帆面面积;ρs为太阳帆镜面反射系数[2]。定义Fs,F⊥分别为光压力沿S和S⊥方向的分量,则有

将光压力沿帆面切向和法向进行分解(如图2所示),并考虑帆面光学和热力学特性,可得光压力沿帆面切向和法向分量分别为
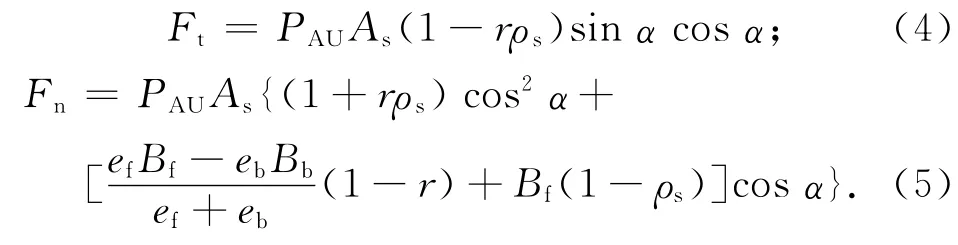
式中:Bf,Bb分别为太阳帆正面和背面的非朗伯系数;ef,eb分别为太阳帆正面和背面的发射系数;r为太阳帆正面反射率[2]。
1.3 动力学模型推导
在O-XY系中,定义太阳帆本体质心位置矢量rs= [XY]T,则 滑 块 位 置 矢 量rp=[X+lcosαY+lsinα]T。设太阳帆本体动能为Ts,滑块动能为Tp,则有

令航天器系统总动能为T,有T=Ts+Tp。忽略太阳帆弹性形变,则系统势能U=0。
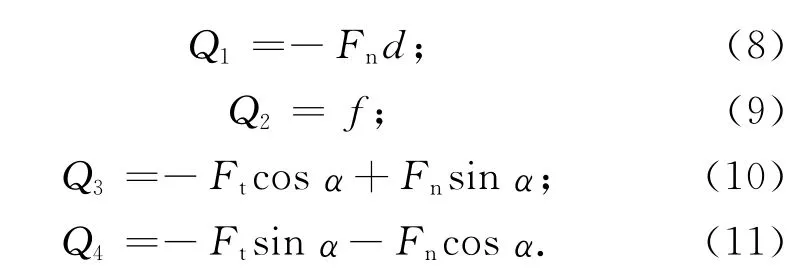
定义广义坐标q=[αlXY]T,广义力Q=[Q1Q2Q3Q4]T,由虚功原理,可求得广义力表达式为
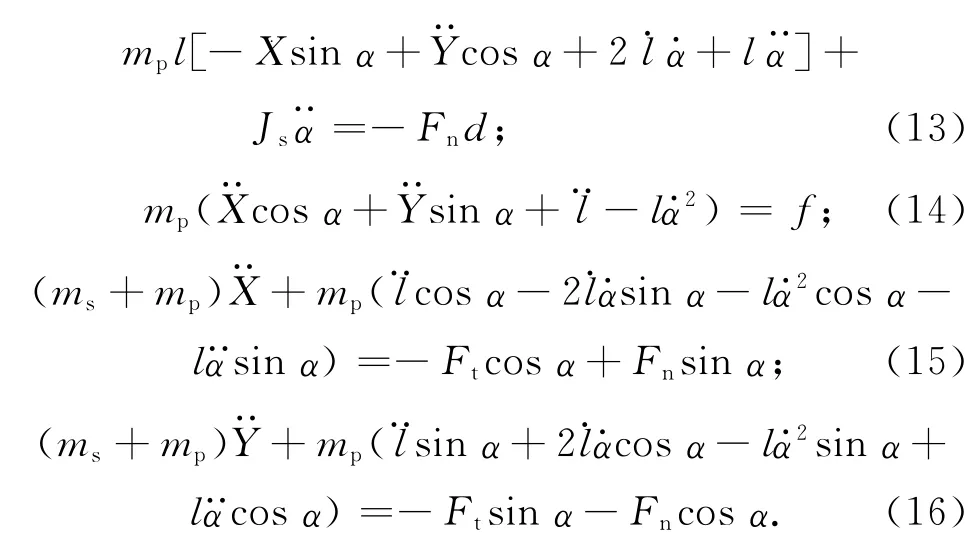
将q,Q及拉格朗日函数L=T-U代入拉格朗日动力学方程

可得太阳帆航天器-滑块两体系统耦合动力学模型为
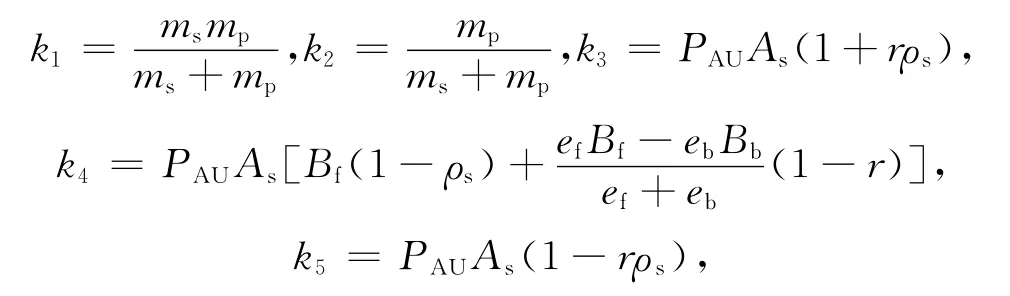
由式(13)~(16)消去变量X,Y,代入光压模型式(4)~(5),并定义常参数
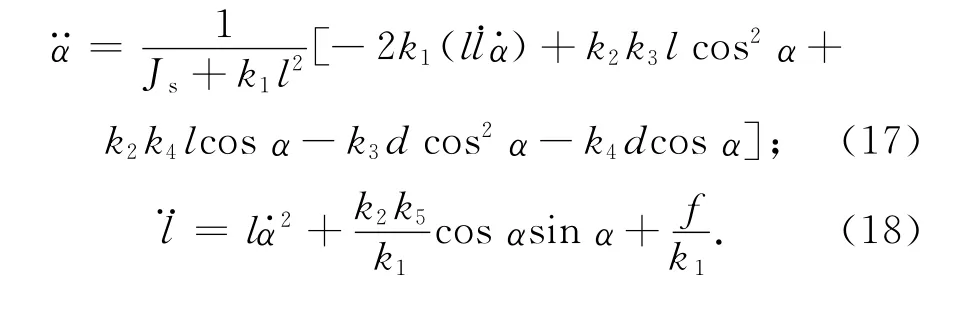
则可得太阳帆航天器偏航通道姿态动力学方程为
2 姿态控制器设计
对上述太阳帆航天器非线性耦合系统,若直接将滑块驱动力作为输入量控制航天器姿态角,则控制律的设计较难,难以在后续环节设计执行机构的分配策略;若将控制系统分为内外环回路,外环以航天器姿态为受控变量,滑块位移为控制输入,而内环以滑块位移为受控变量,滑块驱动力为控制输入,则可显著降低系统控制律设计的复杂度。控制系统方案如图3所示。
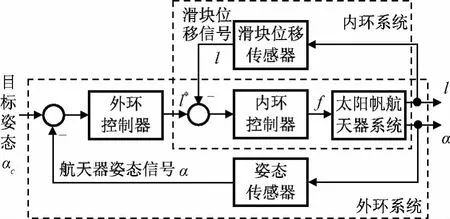
图3 太阳帆航天器姿态控制系统Fig.3 Attitude control system of solar sail spacecraft
2.1 外环姿态控制器设计
对外环系统进行研究时,将滑块位移l视为控制输入,忽略l动态对航天器姿态的影响,则由式(17)可得外环系统动力学方程
对该外环系统模型,若采用传统的非线性系统控制律设计,仅将系统在平衡点处进行小扰动线性化,所得线性模型较原系统而言会丢失大量信息。当航天器姿态远离系统平衡点位置时,可能导致所设计控制律的控制效果急剧下降,难以满足实际任务中大角度姿态机动的需求。本文通过设计变增益LQR控制器以克服上述缺点,实现大范围高精度的太阳帆航天器姿态控制。
变增益LQR控制器为一种基于增益调度的状态反馈控制器,其基本原理是将原非线性系统在一系列状态特征点上转化为线性定常系统,离线求得各特征点处的状态反馈矩阵;在线控制时用加权算法得到实时变化的系统状态反馈矩阵,实现较精确的控制效果。
定义系统状态变量x[]T,等效输入控制量u,将航天器姿态角控制范围(-90°,90°)以步长h(本文取h=10°)划分为p个区间,其中第q个区间两端点为第q个和q+1个特征点(1≤q≤p),定义第q个特征点处状态,将系统(19)在处小扰动线性化,得特征点处线性系统模型


事先离线求得各特征点处状态反馈矩阵,实际在线姿态控制时,通过实时判别当前姿态角α所属区间q,采用加权算法

即得任意姿态角对应的状态反馈矩阵。此处:rq为加权系数,且rq= [(-90°+q·h)-α]/h。最终求得最优控制输入

由于太阳帆结构杆长度限制,滑块沿导轨运动区域需限制在一定范围内。定义滑块位移绝对值最大值为lmax,限幅处理后滑块最优位移为,设计滑块位移限幅器为

2.2 内环姿态控制器设计
内环回路以外环控制器给出的滑块最优控制位移作为跟踪指令,滑块实际位移l作为受控变量,驱动力f作为控制输入,内环动力学方程为式(18)。定义跟踪指令位移为lc,跟踪误差Δll-lc,构建滑块位置误差Δl的理想动态为:

对式(25)配置合适的控制参数c1,c2,可使滑块位置误差Δl→0,即l→lc。将Δl=l-lc代入式(25),联立式(18),整理后可得

式(26)即为设计的内环控制律,是带非线性补偿项的PD控制器。式中lc即为外环控制律得到的。为保证内环实际输出的滑块位移幅值不超过经限幅的位移指令幅值,应适当配置PD控制参数c1,c2,使内环系统保持为临界阻尼或过阻尼状态。
同样对滑块驱力进行限幅器设计。定义驱动力最大幅值为fmax,限幅后驱动力为fsat,设计滑块驱动力饱和限幅器

3 执行机构分配策略
为简化姿态动力学模型,上述建模过程将沿对角线两根导轨各自运动的双滑块等效为可沿帆面全对角线运动的单个滑块,并对单滑块设计控制律。但工程实现中,需将设计单滑块控制律还原为双滑块控制律,即将单个滑块的受控运动分配至运动位移分别恒正/恒负的双滑块上。
因滑块实际运动中必然将电机驱动噪声和摩擦力等干扰引入航天器系统,为减少滑块运动过程对航天器动态可能的不良影响,采用运动分配策略

式中:l为等效滑块的位移;l1为沿正向导轨运动滑块的位移,且l1≥0;l2为沿负向导轨运动滑块的位移,且l2≥0。采用上述执行机构分配策略,可保证任一时刻同对角线上仅有单个滑块运动,尽可能减少滑块运动对系统动态引入的干扰。
4 ADAMS-MATLAB联合仿真
针对本文研究的带移动滑块太阳帆航天器,在ADAMS软件中建立偏航通道实体动力学模型如图4所示。航天器模型有关参数源自美国新千年计划ST7(NMP ST7)的太阳帆实验任务[8]。仿真物理参数为ms=156kg;mp=10kg(5kg×2);J=3 000kg·m2;d=0.05m;单结构杆长度30m;PAU=4.563×10-6N/m2;As=1 400m2;Bf=0.79;Bb=0.55;ef=0.05;eb=0.55;r=0.88;ρs=0.94。
在实体模型上定义载荷。本文研究的太阳帆航天器在空间所受外力仅有作用于压心Op处的光压作用力。由光压模型式(2)~(3)可知:光压分力Ft,Fn大小由航天器姿态角α及表帆面光学参数决定。
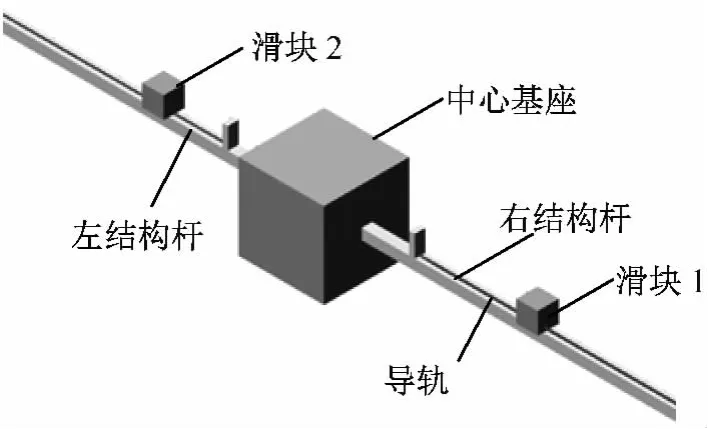
图4 ADAMS建立太阳帆航天器仿真模型Fig.4 Simulation model of solar sail spacecraft in ADAMS
为定义ADAMS,MATLAB软件间的数据交换接口,在ADAMS/Controls模块中定义控制输入变量为两滑块驱动力f1,f2,输出变量为航天器姿态α,两滑块位移l1,l2及速度。数据交换变量定义完毕后,在Plant Export界面输出联合仿真所需的*.m,*.cmd,*.adm接口文件。
在MATLAB中运行生成的m函数文件,利用接口命令adams_sys生成含联合仿真所需的Simulink模块,其中adams_sub模块包含ADAMS软件建立航天器非线性动力学模型及各输入输出信号接口。按上文设计控制律,以adams_sub模块为核心,在Simulink软件中建立控制系统联合仿真模型。
仿真取内环控制器参数c1=60,c2=10,外环控制器参数Q=diag[103103],R=10,双滑块各自驱动力最大幅值1N,滑块位移最大幅值28m。为验证本文设计控制律对存在初始姿态角误差和角速度误差的太阳帆航天器的控制效果,并与传统固定增益LQR控制律比较,取太阳帆初始姿态为(α0)= (-60°,-0.03 (°)/s),跟踪目标姿态(αc,)=(35°,0 (°)/s),取固定增益 LQR 控制律状态反馈阵K0为系统在初始状态 (α0)下线性化求解得到的反馈矩阵。仿真所得太阳帆航天器状态变化如图6~8所示。
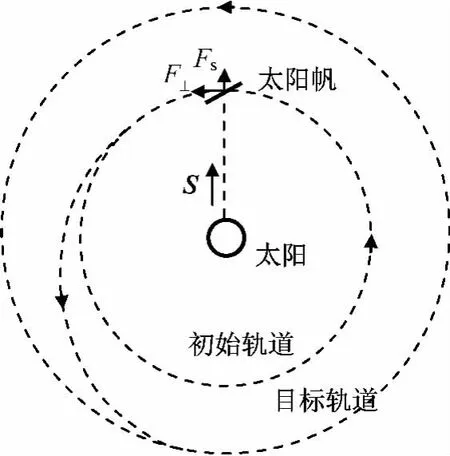
图5 行星际太阳帆航天器变轨Fig.5 Interplanetary solar sail spacecraft’s orbit curve
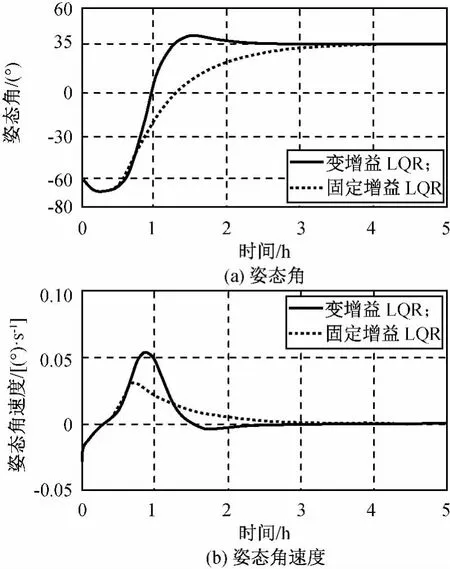
图6 太阳帆航天器姿态变化Fig.6 Attitude of solar sail spacecraft
由图6可知:外环采用变增益LQR和固定增益LQR控制律均可对太阳帆航天器姿态进行有效控制,固定增益LQR姿态控制耗时较长,航天器跟踪至目标姿态需时约4h;变增益LQR控制律的控制效果明显优于固定增益LQR控制律,航天器在约2h时间从初始状态跟踪至目标姿态阶跃信号αc=35°,之后滑块仅需保持在配平点位置,使系统实际质心与压心重合,无需维持大推力驱动即可抑制光压干扰力矩,航天器姿态稳定在目标姿态处,实现太阳帆航天器大角度快速机动和长期姿态稳定的任务要求。
图7 滑块位移变化Fig.7 Displacement of moving mass
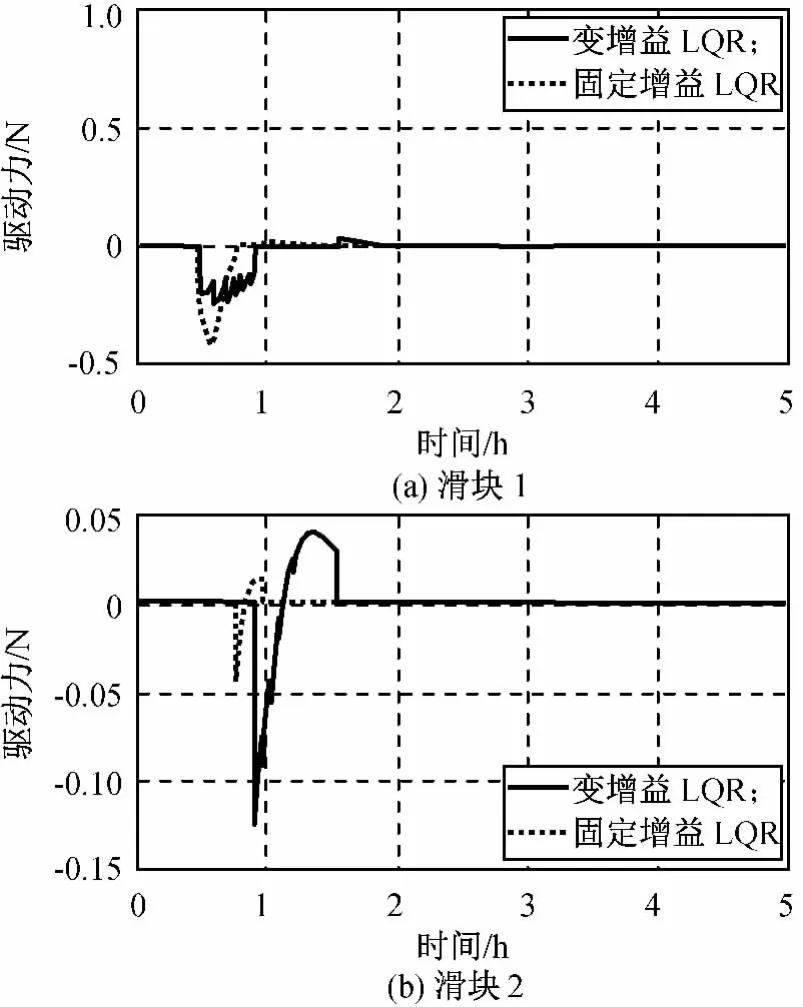
图8 滑块驱动力变化Fig.8 Driving force of moving mass
由图7~8可知:姿态控制过程中滑块位移l1,l2和驱动力f1,f2幅值均被限制在要求范围内,设计饱和限幅器可有效限制系统控制输入大小,且限幅后的控制输入仍能满足系统姿态控制的需要。
5 结束语
本文对基于移动滑块的太阳帆航天器姿态控制方案进行了研究。以太阳帆航天器偏航通道为例,建立其姿态动力学模型,将姿态控制系统分解为外环和内环回路,分别设计了变增益LQR控制器和带有非线性补偿的PD控制器。在ADAMS软件中建立航天器实体仿真模型,通过 ADAMS-MATLAB动力学联合仿真实验,对设计的姿态控制律的有效性进行了验证。结果表明:设计基于移动滑块的太阳帆航天器姿态控制方案,能针对存在初始角位置误差和角速度误差的太阳帆航天器进行有效的姿态控制,实现太阳帆航天器大角度快速机动,同时可满足长期飞行任务中抑制光压干扰力矩和保持姿态稳定的需求。与传统带控制杆或控制翼面的控制方案相比,基于移动滑块的太阳帆航天器姿态控制方案具有结构简单可靠,任务适应性强等特点,在未来太阳帆技术研究领域有重要价值。
[1] McINNES C R.Solar sailing:technology,dynamics and mission applications[M].Berlin:Springer,2004.
[2] WIE B.Solar sail attitude control and dynamics,part 1[J].Journal of Guidance,Control,and Dynamics,2004,27(4):526-535.
[3] JOHNSON L,YOUNG R,MONTGOMERY E,et al.Status of solar sail technology within NASA[J].Advances in Space Research,2011,48(11):1687-1694.
[4] MURPHY D M,MURPHEY T W,GIEROW P A.Scalable solar-sail subsystem design concept[J].Journal of Spacecraft and Rockets,2003,40(4):539-547.
[5] WIE B.Thrust vector control analysis and design for solar-sail spacecraft[J].Journal of Spacecraft and Rockets,2007,44(3):545-557.
[6] THOMAS S,PALUSZEK M,WIE B,etal.AOCS performance and stability validation for large flexible solar sail spacecraft[C]//41th AIAA/ASME/SAE/ASEE Joint Propulsion Conference & Exhibit.Tucson:AIAA,2005:1-18.
[7] 罗 超,郑建华.采用滑块和RSB的太阳帆姿态控制[J].哈尔滨工业大学学报,2011,43(3):95-101.
[8] WIE B.Solar sail attitude control and dynamics,part 2[J].Journal of Guidance,Control,and Dynamics,2004,27(4):536-544.
猜你喜欢
国际太空(2022年7期)2022-08-16
国际太空(2019年9期)2019-10-23
国际太空(2018年12期)2019-01-28
国际太空(2018年9期)2018-10-18
求学·理科版(2017年10期)2017-12-19
婚姻与家庭·性情读本(2017年1期)2017-02-16
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
空间控制技术与应用(2015年1期)2015-06-05