测控链路计算
2014-12-31 11:58袁卫文
上海航天 2014年5期
袁卫文
(上海航天电子技术研究所,上海 201109)
0 引言
月球和深空项目的轨道器测控数传分系统受总体条件的限制,每个分系统分配的质量和功耗非常低,因此要求实现测控数传一体化。上行数据信号由遥控和测距组成,下行数据信号由目前的遥测变成遥测、测距、ΔDOR和数传等,即可支持测控信号PM调制,也可支持数传信号BPSK调制。这对测控数传分系统的设计提出了很高的要求。通过合理选择的调制度进行上下行调制信号最佳功率分配是关键。调制度的大小直接改变了总的射频功率在残留载波及多路副载波间的功率分配。文献[1]研究了在无测距音提取滤波器时信号调制度选取的最佳方法。设计小调制度的结果是相应的副载波信道分配的功率变小,信道余量减小。对中低轨道航天器来说,信号电平相对较强,调制度即使有变化,也因信道余量相对较大而被忽略。但对月球和深空等远距离探测任务来说,信号电平相对微弱,信噪比相对恶劣,信道余量较小,则会对测控能力产生严重影响[2]。文献[2]针对应答机采用不同的自动增益控制(AGC)控制模式所得的残留载波、残留遥控、转发测距和转发噪声的实际调制度各异,给出了不同条件下的调制度数学模型。目前国内外的测控应答机常通过采用射频相干AGC控制环路,以使环路带宽随信噪比而变,达到最佳的跟踪及捕获性能。在此基础上,本文对测控链路进行了计算。
1 信号分析
统一X频段测控系统上行载波和下行载波均采用调相(PM/PM)体制,其射频信号是一正弦调相波,由若干个正弦副载波所调制。具有多个副载波同时对一个载波进行调制的窄带调相信号可表示为

式中:A为载波幅值;ωc为载波角频率;k为副载波数;mi为第i个副载波的调制度;Ωi为第i个副载波的角频率。
每路副载波与残留载波之差可用贝塞尔函数关系算出。式(1)的贝塞尔函数表示式为
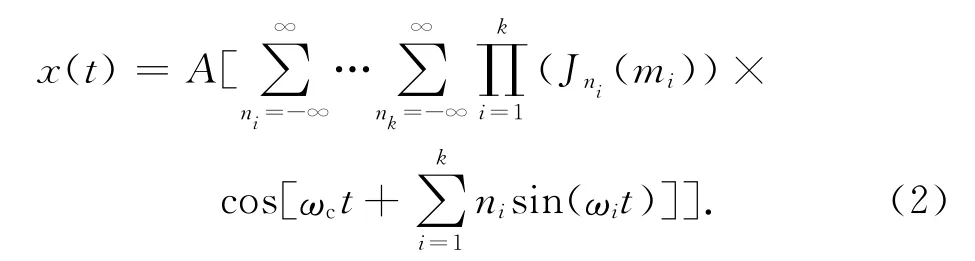
式中:Jni为变量mi的第ni阶贝塞尔函数[3]。
由文献[1],当式(2)中n1=n2=…=nk=0时为残留载波分量,其功率

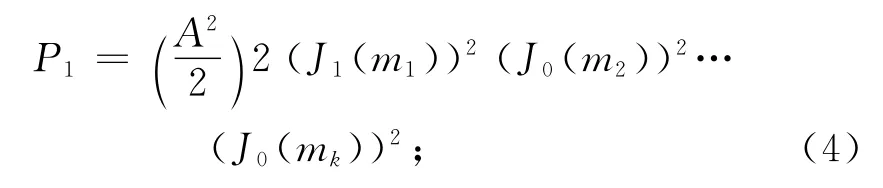
当式(2)中n1=±1,n2=n3=…=nk=0时为第一副载波的一阶边带分量,其功率
当式(2)中n2=±1,n1=n3=…=nk=0时为第二副载波的一阶边带分量,其功率

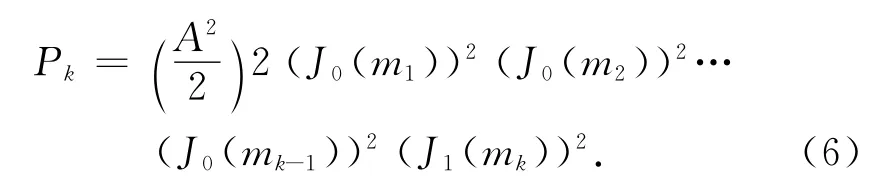
当式(2)中nk=±1,n1=n2=…=nk-1=0时为第k副载波的一阶边带分量,其功率
总的有用功率

Pef与发射功率之比为载波利用率η。
最佳功率分配是按各调制信号的检测门限分配功率,并使有用功率的比例及调制信号的功率分量达到最大。
由式(2)可得,在调制两个副载波且分别对应频率f1,f2时,调制信号频谱除存在无穷多个频率为fc+nf1,fc+kf2的分量外,还存在无穷多个频率为fc+nf1+kf2的组合频率分量,均对称分布于载频两侧。此处:fc为载波频率。当满足f1≈nf1+kf2,n,k取值为(-∞,∞)时,组合频率对副载波f1产生交调干扰[3]。其中,三阶交调信号直接落于锁相应答机的接收频带内形成干扰,进入锁相后变为相位噪声而影响测量精度,严重时将使应答机错锁而直接导致跟踪失败。三阶交调分量一般无法用滤波器滤除,须通过合适的放大器件和设计适当的匹配电路[4]。由高价项和交调引起的功率损失

系统设计时应限制γ为足够小,一般以不超过15%为宜,且越小越好。同时,各副载波调制度的均方根值≤1.5。
另外,在BPSK调制系统中,PSK系统的功率谱均有(sinx/x)2的形状,若输入数据的比特率为rb,则BPSK主瓣的第一个零点在f/rb=1处,频谱幅值以正比于(f/rb)-2的速率滚降[5]。由文献[3]可知:作为调制信号时,随机数据和周期信号的功率谱包络形状相同,区别是前者为连续谱,后者为离散谱,且谱线间隔的大小与调制信号的码速率有关,如图1所示。因此,在多副载波调制系统中,当副载波调制周期信号时其交叉调制产生的组合频率会受信号的码速率等因素的影响,频谱结构较调制前更复杂,信号间产生交调干扰的可能性更大[3]。
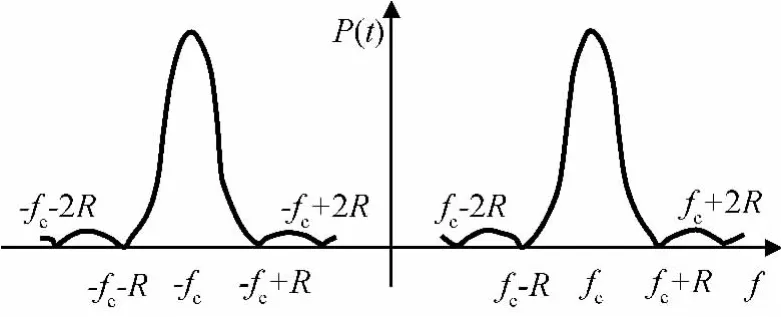
图1 BPSK功率谱密度Fig.1 Power spectral density of BPSK
2 信道预算
2.1 计算条件
假设已知残留载波的信号噪声功率谱密度的要求,遥控PSK信号的误码率要求,遥测DPSK信号的误码率等典型值如下:
a)残留载波要求的信号噪声功率谱密度比42.03dBHz。其中锁相环路噪声门限带宽(2BLO)800Hz,锁相环路内需要的载噪比16dB[6]。
b)星上遥控终端要求的信号噪声功率谱密度比43dBHz。其中误码率要求优于1×10-5,星上遥控终端需要的归一化信噪比16dB,码速率500b/s。
c)地面遥测终端要求的信号噪声功率谱密度比38.5dBHz。其中误码率要求优于1×10-5,地面遥测终端需要的归一化信噪比11.6dB,码速率为2 048b/s(编码前),该级联编译码系统可获得6.2dB的编码增益[7]。
d)地面站要求的载噪谱密度比典型值40dBHz。
e)地面测距终端要求的主测距音信号噪声功率谱密度比27dBHz。其中侧音环路带宽B=10Hz,侧音环跟踪门限需要的信噪比20dB[8]。一般,次测距音的功率门限值不会大于主测距音的功率门限值(因主测距音相对较次测距音更重要)。因此,次测距音信号噪声功率谱密度比典型值为24dBHz。
f)考虑到上行转发损耗,取转发损失3dB,故上行主侧音的信号噪声功率谱密度比要求为30dBHz。相应地,上行次侧音的信号噪声功率谱密度比要求为27dBHz。
g)地面数传设备要求的信号噪声功率谱密度比67.4dBHz。其中误码率要求优于1×10-6,地面数传设备需要的归一化信噪比13.6dB,码速率1Mb/s(编码前),该级联编译码系统可获得编码增益6.2dB。
2.2 调制度选择
调制度确定后,功率分配也就随之而定。但应答机采用不同AGC模式,所得残留遥控、转发测距和转发噪声的实际调制度各异。
星上应答机测距音转发方式采用低通滤波器转发,在测距相干AGC控制模式下,下行转发测距调制度和转发遥控调制度不随应答机接收的上行信号信噪比下降而减小,但转发噪声调制度会随信噪比下降而增大。实际输出的下行转发测距调制度mR、转发遥控调制度mTC和转发噪声调制度mN分别为
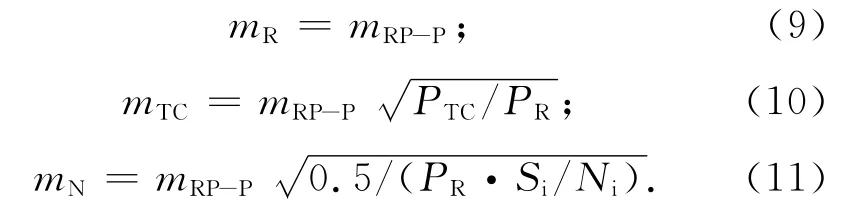
式中:PR为上行测距信号的调制损耗;PTC为上行遥控信号的调制损耗;mRP-P为下行测距信号理论调制度;Si/Ni为应答机上行接收信噪比[9]。
以下本文主要讨论满足上行应答机门限载噪比16dB时最大下行转发噪声调制度。
2.3 调制度计算
在上行主测距音+遥控工作模式下有转发遥控、转发主测距音、遥测和转发上行互调4种信号参与下行调制。优选的上行调制度组合及其对应的4种下行调制度组合分别见表1、2。表中:TC,TM分别为遥控和遥测调相指数;Rmain为主测距音调相指数;Rside为次测距音调相指数;M为各调制度的均方根值;Noise为下行转发上行互调信号等效调制度;S(TC)为遥控所需的未调载波射频谱线的信号噪声谱密度比要求。
在上行主测距音+次测距音工作模式下有转发主测距音信号、转发次测距音、遥测信号和转发上行互调4种信号参与下行调制。优选的上行调制度组合及其对应的4种下行调制度组合分别见表3、4。
上行主测距音+遥控工作模式下的上下行调制度组合汇总见表5。上行“主测距音+次测距音”的工作模式是用于测距工作过程的匹配阶段。当匹配过程完成后,进入跟踪阶段,此时只需发送主测距音1个[10]。由表5可知:在上行组合干扰分量占17.3%,略大于上行交调占总功率尽可能≤15%的要求;在下行,下行转发噪声占下行功率的0.6%,无用的转发遥控信号占了11.9%,下行互调占16.8%,总无用功率占29.3%。

表1 优选上行调制度组合Tab.1 Combination of priority up-link modulation indexes

表2 对应的下行调制度组合Tab.2 Combination of priority down-link modulation indexes

表3 优选上行调制度组合Tab.3 Combination of priority up-link modulation indexes

表4 对应的下行调制度组合Tab.4 Combination of priority down-link modulation indexes
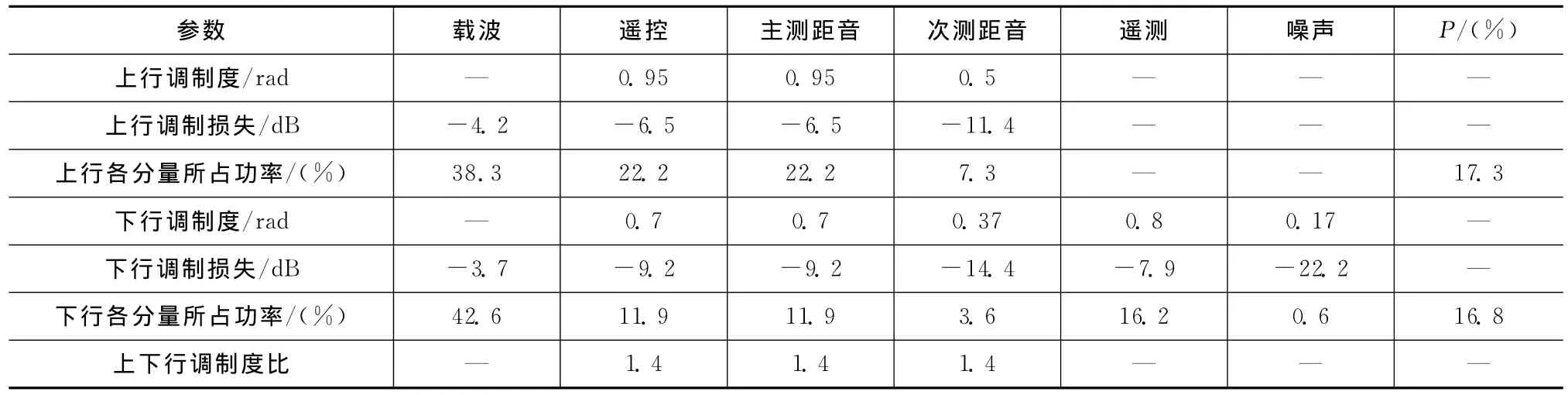
表5 上下行调制度组合Tab.5 Combination of priority up-link and down-link modulation indexes
2.4 信道预算
对月球和深空项目的测控数传分系统设计来说,主要是根据现有的X频段地面深空网和地面应用系统的技术性能指标设计一满足设计余量要求的测控数传分系统,以确保完成轨道器的测控数传任务[11]。通过信道预算,可得残留载波和每路副载波星地信道的余量,以及数传星地信道的余量,结果见表6。
因此,在X波段应答机的G/T值(≥33dB/K)和EIRP值(≥2dBW)的条件下,如在地面测控站采用深空站(EIRP≥104dBW,G/T≥46dB/K(含月球噪声)),上下行信道余量极大。为满足各副载波功率达到一定的门限值,使副载波解调器的输入端的信噪比大于一定的门限值,则各副载波的调制度宜选大为佳。
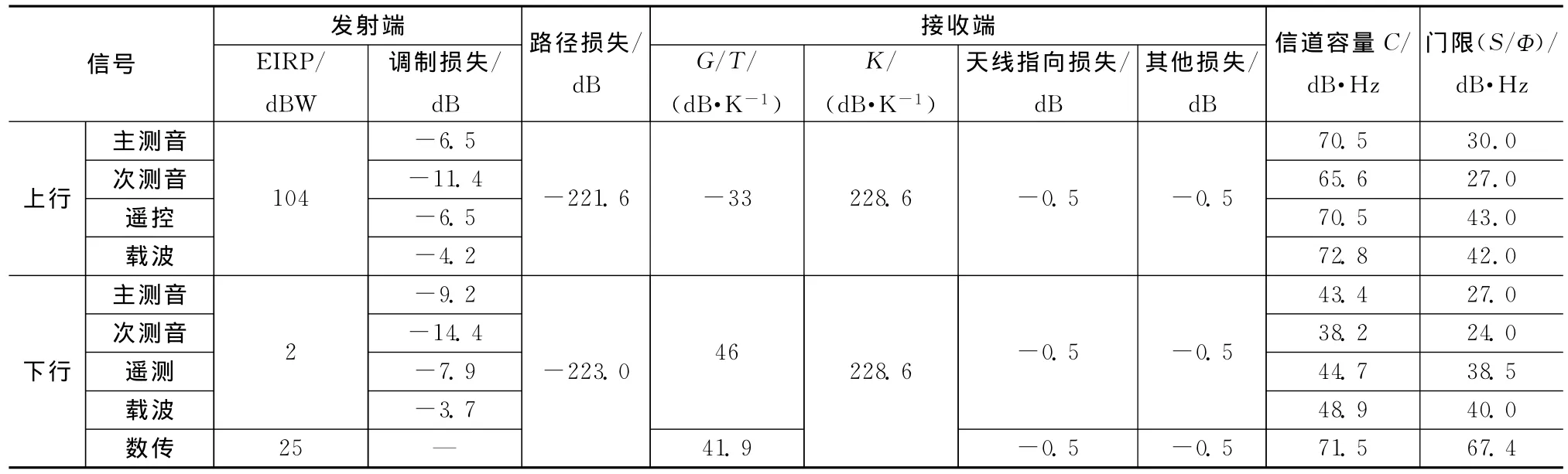
表6 探测器使用全向和定向天线时深空网的信道容量Tab.6 Channel capacity of UXB deep space TT&C network using omni-directional and directional antenna
地面测控站采用18m测控站时(EIRP≥83dBW,G/T≥33dB/K(含月球噪声)),上行信道余量可保证,但下行信道余量较紧张[12]。因此,从下行功率效率高的角度考虑,调制度的值不宜选大。
3 结束语
本文对月球和深空等远距离探测任务的测控数传链路进行了计算,给出了数学模型及计算结果,并提出了在射频相干AGC控制模式下且无提取滤波器条件下信号调制度选取的最佳方法。为满足各副载波功率达到一定的门限值,各副载波的调制度宜选大,但从下行功率效率高的角度考虑,调制度的值不宜选大,合理选择调制度可降低对航天器G/T值和EIRP值的要求。
[1] 张 蕾,李冠群.测控上下行信号调制度的最佳选择[J].航天器工程,2007,16(1):38-43.
[2] 李海涛,董光亮.测控应答机下行调制度问题的技术分析[J].飞行器测控学报,2006,25(6):44-48.
[3] 石启亮,陈 东,陈方涛.USB系统多副载波调制对测距性能的影响[J].遥测遥控,2011,32(2):59-63.
[4] 张晓发,王 超,袁乃昌,等.UHF宽带线性功率放大器设计[J].现代雷达,2006,28(10):79-81+84.
[5] 叶丽艳,吕新宇,吴中一.卫星通信系统调制方式的研究[J].微波与卫星通信,1997(3):31-34.
[6] CCSDS.CCSDS 401O-B blue book,radio frequency and modulation systems-part1:earth stations and spacecraft[M].New York:CCSDS,2005.
[7] 宋 成.级联码在遥测系统中的应用[J].信息与电子工程,2011,29(2):165-168.
[8] 成亚勇.侧音测距在探月测控中的应用[J].无线电工程,2009,29(6):40-41+45.
[9] 朱智勇,李海涛,樊 敏.应答机转发测距调制度的特性分析与测试方法研究[J].飞行器测控学报,2010,29(6):7-12.
[10] 朱克勤,高 敏.纯音测距体制中软件解模糊的实现方法[J].上海航天,2003,20(4):26-29.
[11] 陈之纯,贺 平,柳 丽.月球探测技术-探测初期测控通信系统[J].上海航天,2003,20(6):59-62.
[12] 吴伟仁,黄 磊,节德刚,等.嫦娥二号工程X频段测控通信系统设计与试验[J].中国科学:信息科学,2011,41:1171-1183.
猜你喜欢
导航定位学报(2022年4期)2022-08-15
计算机测量与控制(2021年8期)2021-08-23
中国船检(2020年11期)2020-11-27
科学(2020年3期)2020-01-06
载人航天(2019年1期)2019-03-07
电子制作(2017年7期)2017-06-05
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
航空模型(2016年5期)2016-07-25
太空探索(2016年12期)2016-07-18