推进器辅助系泊系统的动态张力控制
2015-01-25 10:51秦煜婷陈红卫袁文亚
电子设计工程 2015年8期
秦煜婷,陈红卫,袁文亚
(1.江苏科技大学 电子信息学院,江苏 镇江 212003;2.淮安远航船用设备制造有限公司 江苏 淮安 223001)
我国正处在高速发展时期,原油进口与日俱增,而后备石油资源严重不足,陆上石油资源有限,可以预见,我国海洋石油开发的下一个高潮即将在深海领域中进行。位置系泊系统的商业应用源于上世纪八十年末期,是应用于永久海上石油平台的不错的备用方案。上世纪七十年代开始,位置系泊系统的研究主要是基于动力定位系统研究的经验。文献[1]提出了基于最优控制和卡尔曼滤波的动力定位系统;文献[2]是对文献[1]理论的发展。近年来,提出了积分反向递推技术[3]。在文献[4]中,通过解悬链线方程提出了一种基于锚泊线特性的锚泊系统模型,且最优控制器被引用到此系统中。最近几年,更先进的控制器,基于观测器反向递推和最优反向递推方法发展起来。
在较深或环境恶劣的水域,定位中需加入推进器辅助系统。为了更好的达到资源有效利用,我们要尽可能的较少燃料损耗。由此,们使用动态张力锚泊线来消除连续或者慢变的干扰,如:平均风力、平均流力和潮汐流力,连同纵荡、横荡、艏摇上的阻尼,航向的控制。
1 数学模型
数学模型的研究包含船舶刚体子模型和锚链的偏微分方程模型。用有限元方法进行锚链方程的空间离散化。综合考虑边界条件,建立船舶锚泊动力学模型。
1.1 坐标系
在环境因素(风浪流)复杂的海况下,无约束的船体表现为6个自由度的运动,实际的船舶定位系统中,只考虑3个自由度的运动:纵荡、横荡与艏摇。为了研究船舶的运动,需要建立两个坐标系,如图1,XOY为相对于地球的固定坐标系,xoy为相对于船体的随船坐标系,两者的Z轴垂直指向地心。
用向量η=[X,Y,ψ]表示船舶在固定坐标系下的位置和艏向角度,用V=[u,v,r]表示船舶在随船坐标系下的速度,两者之间存在转换关系:

其中,转换矩阵为:


图1 地坐标与船体坐标系Fig.1 Earth-fixed and body-fixed reference frames
J(ψ)为非奇异矩阵,且满足 J-1(ψ)=JT(ψ)。
1.2 船舶运动学
三自由度的船舶低频运动模型可以描述为
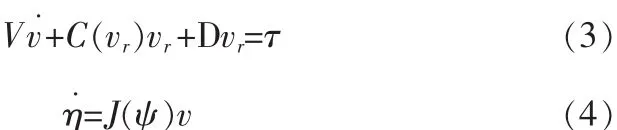
其中

vc(Z)∈R3为大地坐标系中海流的速度,M为惯性矩阵,C为向心矩阵,D为阻尼矩阵,τ由环境力(除了流力,因为在定义vr的时候已经考虑进去)和推进力组成。在船舶状态保持的应用中,舶速很小,C(vr)vr可被忽略,且D被认为是常数。
1.3 多缆锚泊系统
忽略弯曲和扭转刚度的缆运动方程为:

式中:s∈[0,L]为沿未拉伸锚线的距离,L为未拉伸锚线的长度。v(s,t)∈R3为锚链速度,t(s,t)∈R3为切向矢量。ρ0为锚线单位长度的质量,T 为张力,e 为拉伸形变率,f(s,t)为微元所受合外力。引入位置向量r(s)∈R3,应用胡克定律得:

式中:E为杨氏系数 (弹性模量),A0为缆的横截面积,有关系e=。合外力的表达式为:

其中:fhg为单位锚线上的浮力,fdt为单位切向水动力阻力,fnd为单位法向水动力阻力,fnm为单位水动力惯性力。水动力由莫里森方程建模,表达式如下:

式中:g∈R3为重力加速度,ρc和ρw分别为缆绳密度和所处环境中水的密度,CDT为缆绳切向阻力系数,CDN为法向阻力系数,d为缆的直径,CMN为水动力质量系数,vt和vnt分别为缆绳切向速度和法向速度,an为加速度的法向分量。
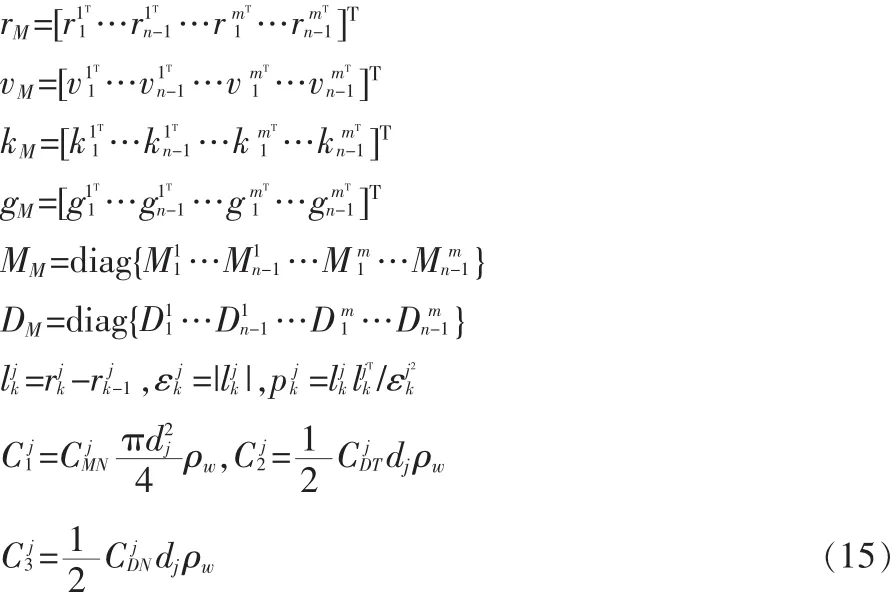
利用有限元模型研究多缆锚泊系统[5]。模型中,多缆锚泊系统中的每条缆绳都被分成n段,节点编号为-n,在大地坐标系中,第j条缆的第k个节点表示为,相对速度表示为=-vc(),vc()为处水流的速度,边界条件为:1)每个缆的第一个节点固定在缆底。2)所有缆绳的终点在水面上汇聚成一点,==…=。
为了研究方便,定义如下工程量:

锚泊运动学方程为:
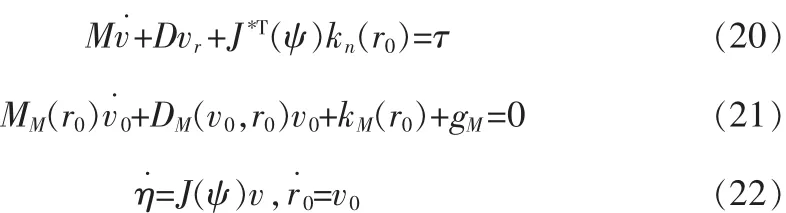
1.4 船舶锚泊动力学模型
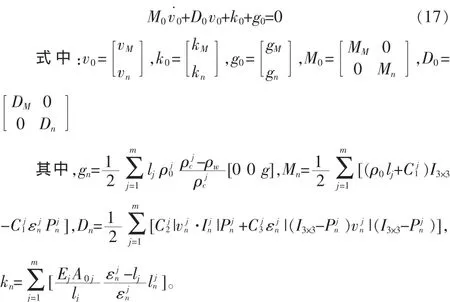
在3个自由度下对船舶动力学进行研究,包括其位移和水平面上的旋转。因此,当所有锚泊线的上端点连接到船舶转台上时,锚泊系统需考虑以下边界条件:

与Mn和Dn有关的部分可以被忽略,推出下面锚泊船的完整运动方程。
2 参考自适应控制器的设计
源于物理的无源性的概念,它将输入输出的乘积作为能量的供给率,体现了系统在有界条件下能量的衰减特性。事实上,基于李雅普诺夫函数的稳定性理论,也可从无源性的角度加以解释,无源性与稳定性有着不可分的关系。因果动态系统中,无源性与稳定性是等价的。缆绳动态张力控制器的设计基于如下两条假设:1)船舶已配置动力定位系统。2)船舶可以实时的测量锚线上的张力。
以τc表示动力定位控制器计算出的执行力,τm为锚泊力投射到水平面上的力,定义推进器的力为[6]:

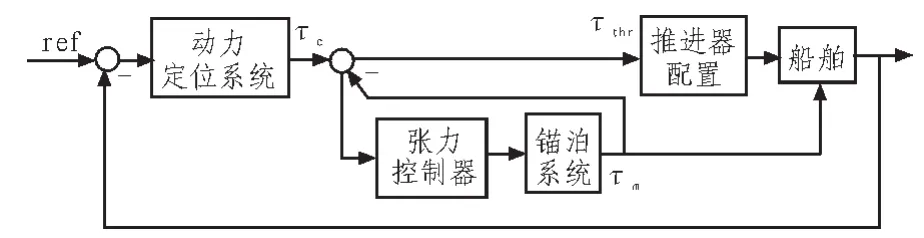
图2 动力辅助锚泊定位船系统框图Fig.2 Block diagram of thruster assisted mooring positioning system
因此,推进器辅助锚泊系统的性能完全取决于动力定位控制器。动态张力控制器的目的是追踪,使得执行力尽可能少的分配给推进器,通常来说,控制问题是:
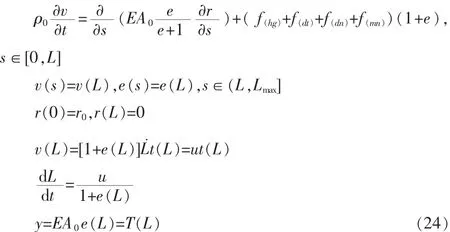
找到 u(t)确定 y(t)的参考值 Tref,以上公式中,r(L)=0,即DP系统被假设成理想的分析模型。船舶距期望位置的偏差被视为噪声。Tref在一定的区间内由静态锚线特性给出。存在L*∈[Lmin,Lmax],r*(s)和 e*(s)满足:

并且 Tref=EA0e*(L*)。
将附加质量加到等式左边:

包含水动力附加惯量的惯量矩阵是常数,即M˙c=0。可证明系统(24)是严格无源的,既满足:

动力定位锚泊船的惯性矩阵相比于闭环系统的动态特性将要缓慢变化。因此M˙=0,是一个好的假设。通常,惯性矩阵取决于浪的频率,船和锚链的速度。然而,在工业控制系统应用中,这些都可以忽略。
3 仿真实验
仿真对象选择锚线长度为2 250 m的深海锚泊船,锚泊线选择密度为5 500 kg/m3的合金材料。目前,在流体作用力的研究中,很大一部分工作是集中在如何得到可到的水动力系数上。在这方面,无论在实验或者实地测试上都积累了相当的数据,但是,实验情况会存在尺度效应所引起的误差,实地测试也存在着技术和精度方面待解决的问题。在一些规范中,则直接给出了CM,CD的取值范围和要求。如挪威船级社(DNV)规定在 Stokes五阶波时,CDN取 0.5~1.2,CM取 2.0;API规定在应用 Stokes流理论时,CDN取 0.6~1.0,CM取 0.5~1.2。 质量矩阵 M=[9.6×107,0,0;0,1.3×108,-5.3×109;0,-5.3×109,5×1011],阻尼矩阵 D=[9.2×105,0,0;0,2.4×106,-9.7×107;0,-9.7×107,1.3×1010],仿真时锚泊线的 速度为 Vc(z,t)=-cos(t/6 875);sin(t/6 875);0]z[0,1 000]。
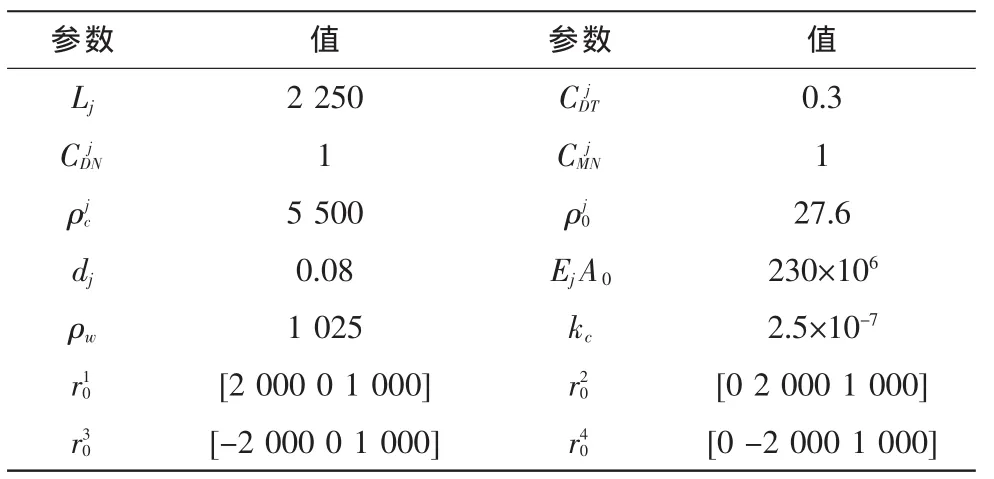
表1 仿真所用参数Tab.1 Parameters used in the simulation
仿真可简单的表明动态锚链张力控制减少燃料消耗的作用。仿真只考虑潮汐流的干扰。表1为用到的仿真参数。动力定位系统的描述参见文献[7],张力控制器追踪执行力τc。锚泊系统为四根锚链,锚点均匀分布在以2 km为半径的圆上。彼此相对的锚线相对于原点以相同的速度缠绕,执行力以这样的方式分配到缆绳上。此控制策略用P控制器实现。

kc为控制器增益,τc表示执行力,τm为锚泊力,B 是 m×3的通过锚点给出的配置矩阵:


图3 上下两图非别为x方向执行力(虚线)和推进器的力(实线),y方向执行力(虚线)和推进器的力(实线)Fig.3 Commanded (dotted) and thruster forces(solid) in the xdirection(upper graph) and y-direction(lower graph)
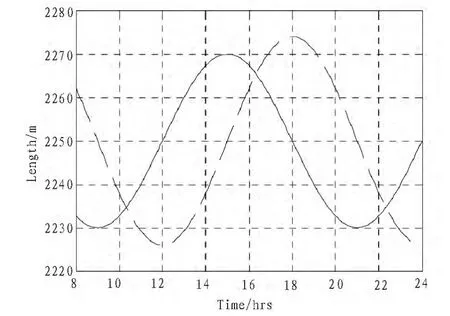
图4 正x方向(虚线)和正y方向(实线)的锚线长度Fig.4 Length of cables at positive x-axis (dotted) and positive y-axis(solid)
图3 显示了动力定位系统计算出的执行力和推进器分配的力。如预期,推进器的力很小,意味着张力控制器很好的跟踪了执行力。图4为正x和正y方向的锚泊线的长度。通过两幅仿真图可以看出,在平稳环境条件下,锚泊系统提供大部分的执行力,推进器提供很小的一部分环境力。
4 结 论
文章中首先研究了船舶运动,并用有限元法对锚泊进行运动分析,构建成锚泊船的整体运动方程。随后,设计动力辅助锚泊控制系统并证明了系统的无源性。计算机仿真表明:令锚泊系统补偿持续慢变的环境力,推进器补偿快变的干扰,可以减少船舶燃料的使用。
[1]Balchen J G,Jenssen N A,Saelid S.Dynamic Positioning Using Kalman Filtering and Optimal Control Theory[J].IFAC/IFIP symposium on Automation in Offshore Oil Field operation,1976:183-188.
[2]Balchen J G,Jenssen N A,Mathisen E,et al.A dynamic positioning system based on kalman filtering and optimal control[J].Modeling, Identification and Control,1980,1(3):135-163.
[3]Fossen T I,Grφvlen A.Nonlinear output feedback control of dynamically positioned ships using vectorial observer backstepping[J].IEEE Transactions on Control Systems Technology,1998,6(1):121-128
[4]Strand JP,Sφrensen A J,Fossen T I.Modelling and control of thruster assisted position mooring systems for ships[J].IFAC,1997:160-165.
[5]余龙,谭家华.锚泊线与海底接触的有限元建模及其非线性分析[J].中国海洋平台,2005(2):25-29.YU Long,TAN Jia-hua.Finite element modeling mooring line contact with the seabed and nonlinear analysis[J].China Offshore Platform,2005(2):25-29.
[6]Fossen T I,Strand JP.Passive nonlinear observer design for ships using lyapunov methods:Full-scale experiments with a sypply vessel[J].Automatica,1999,35(1):3-16.
[7]Fossen TI,Strand JP.Nonlinear ship control[M].Fukaoka,Japan:IFAC,1998.
猜你喜欢
公民与法治(2022年4期)2022-08-03
舰船科学技术(2021年12期)2021-03-29
舰船科学技术(2018年8期)2018-09-02
当代陕西(2018年12期)2018-08-04
武汉理工大学学报(交通科学与工程版)(2015年5期)2015-12-05
学习月刊(2015年5期)2015-07-09
学习月刊(2015年10期)2015-07-09
江苏船舶(2015年1期)2015-05-06
人生十六七(2014年35期)2014-02-28
中国船检(2013年10期)2013-08-15