
基于位置测量的机电系统建模及其控制
2015-01-27 08:10杜红彬康小明杨克浊
自动化与仪表 2015年6期
杜红彬,康小明,杨克浊
(华东理工大学 自动化系,上海200237)
机电运动系统常常是受未知转动惯量和摩擦力影响的非线性系统。在高精度的机电运动控制中,控制超调通常会引起不必要的调节误差,特别是在轨迹跟踪的控制要求中[1],超调引起的调节误差不仅会对跟踪精度造成很大的破坏,同时也会浪费控制能量。因此,为了提高跟踪的精度以及抗干扰能力,在设计前馈控制器或干扰估计器[1-2]之前,往往需要辨识出比较准确的模型参数[3-4]。但是在实际应用中,速度的测量通常是通过编码器的定时后向差分[4]来获得的,如何选择合适的采样周期来实现差分测速是一个很棘手的问题。若定时采样周期太小,就有可能出现编码器差分为零的情况,或速度变化缓慢,不能反映快速的速度变化;若定时采样周期太大,就可能出现编码器差分过大,速度变化剧烈,从而漏掉某些低速的变化信息。不仅辨识,控制器设计往往也需要速度测量。由于后向差分的这种缺点,势必会对辨识和控制造成一定的误差。
针对上述问题,并根据摩擦力具有局部性非线性的特点,本文提出了一种新颖的辨识方法来解决上述难点,该方法能够快速地完成辨识计算,而且仅需要位置反馈而不需要速度测量。同时设计了动态尺度化观测器及相应的输出反馈控制器,以避免上述分析中的差分误差,并证明了闭环系统的稳定性。
1 运动系统模型及辨识算法
由于电磁转换时间常数非常小,因此可将单自由度机电运动控制系统表达为

其中:m为未知的转动惯量;p为位置;v为转速;u为控制输入;b为未知的控制增益;f(v)为摩擦力。如果考虑用机理模型表达摩擦力,通常采用Lugre模型[7]:

其中:σ0~σ1,a0~a2,v0是待定的参数。
尽管在文献中基于Lugre的模型常常被采用,但是这类机理模型存在着以下缺陷使得其实际应用并不理想:
1)机理模型中有许多待定的参数,并且很难估计这些参数值。
2)在模型(2)中采用动态方程描述摩擦力,其中的状态变量无法直接测得。
3)摩擦力模型往往只针对在特定的实验条件,而这些条件不具备普适性。
近来,一些学者采用神经网络等逼近的方法对摩擦力建模[4-5],而文献[6]提出用3个正切神经元基函数静态描述摩擦力的非线性现象,摩擦力模型给出如下:

其中:静摩擦力系数是 r1,r4,r6;Stribeck 现象由 tanh(r2v)-tanh(r3h)表示;Coulomb 摩擦力是由 r4tanh(r5v)表示;Viscous摩擦力是由r6v表示。注意在文献[7]中,Coulomb摩擦力一般表达为符号函数,即:r4sgn(v)表达式。
用符号函数表达Coulomb摩擦力的缺点是:其不连续性会导致最终设计的控制器不连续。为了消除不连续性,可以用光滑的双曲正切函数tanh(·)来替代符号函数 sgn(·)。
将式(4)替代式(1)中的 Lugre 摩擦力模型,并且两边同时除以b,即:

式中:m,b,r1~r6都是未知的参数;tanh(r5v)=sgn(v)。
为了能有效地辨识出式(5)中的未知参数,可以看到式(4)中的Stribeck现象具有局部性的特点。简单地说,摩擦力的非线性现象在低速时表现为Stribeck现象,而当速度v大于一个特定的速度v*时,摩擦力的非线性现象消失为0,根据以上情况,可以设想:当用适当大的控制输入使得速度由0变大,并保证速度大于Stribeck区的阈值v*(该阈值对应着时间t*),使得摩擦力非线性现象消失,当t≥t*时,有如下公式成立:

常数k5是由于Stribeck现象的局部性产生的;由于直接利用编码器测量出的速度值会存在一定的差分误差,因此直接用来进行辨识会造成辨识参数值不准确,而事实上编码器测出位置的准确度通常比速度测量的准确度要高很多,并且不容易受采样周期选择的困扰,所以如果能够利用位置测量值来完成辨识显然会提高辨识的质量。基于此,对式(6)两边再进行积分,并且假设控制电机朝单个方向运动,即速度为正,有:

定义:

由式(8)及
可以得到:

这样,应用最小二乘可计算出θ估计值:

但最小二乘的缺点是:当N选得很大时,式(10)的计算量太大,通常会出现过拟合问题而且需要离线计算才能获得,也不利于在芯片上在线实施。针对系统(5),求解式(10)最小的N定为4个一定时间间隔的数据点,即:

上边的式子中含有4个未知参数对应4个方程。这样在保证最少是4个点的采样数据下,可采用全主元高斯消去法快速求出4个未知参数值,从而简化了计算量并大大节省了计算时间。为保证上述4个方程有解,4个控制输入应该互不相同。通常采用不同的控制输入来获得不同的速度值,这也是辨识中常见的持续激励PE(persistently exciting)条件的要求[8]。例如,可采用斜坡函数作为控制输入来激发系统,这样容易获得4个不同的速度值。为方便于实际使用,在此举例对辨识过程进行详细地说明。控制输入采用斜坡函数作为激励信号,令u=k1+k2t,由式(7)并且离散化得到结果,在实施中,由于使用定时中断实现采样周期,采样周期可单位化,即 Ts=1。 根据式(7)得到离散化结果,式(11)也可离散化,值得说明的是,尽管上述辨识方法能直接辨识出未知参数但式(4)中的参数 r1~r3仍然是未知的,因此接下来将在控制器设计中对这些未知参数进行自适应补偿。
2 基于动态尺度化观测器的输出反馈设计及闭环稳定性分析
一般来说,速度通过定时后向差分获得,常见的有M法、T法或M/T法测量速度。这些方法要么是对低速或高速测量有效,要么就是实现起来非常困难,因此很难满足高精度控制算法的要求。受文献[9]启发,本文提出采用动态尺度化的高增益观测器来对速度进行估计,以提高速度估计的精度。假设要跟踪的位置、速度和加速度曲线分别是:pr,vr=
则跟踪误差为e1=p-pr,e2=v-vr
动态跟踪系统变成为

采用如下动态尺度化的高增益观测器和控制器:

考虑下面的坐标尺度变换:

由式(13)、式(14)可以整理成以下矩阵形式:

可以选择合适的参数使得矩阵满足如下关系:


定义常数 m0=‖PkC1‖2,m1=‖PaC2‖2,m2=‖PaC3‖2,m3=‖PaC4‖2,。 下面给出主要结论。
定理1 考虑跟踪系统(12),若采用动态尺度化的高增益观测器和控制器(13),则闭环系统收敛且有界的。
证明:
考虑如下Lyapunov函数:

对式(18)求导并且利用不等式关系可以得到:

对式(19)积分得到:

对式(20)两边除以t,并对两边求极限并根据洛比达法则得到:


3 仿真
采用常见的Lugre模型来验证本文提出的辨识和控制算法,模型如式(1)~(3)所示,其中 m=0.0022(kg·m-2),b=0.152,摩擦力模型的参数如下(参数意义见参考文献[5])。

为了保证在4个不同的时刻分别获得4个不同的速度值,辨识采用时间的斜坡函数,即u=18t,对应式(11),辨识的结果如下:

为了验证辨识的效果,将上面的参数代入到观测器和控制器中,式(13),其中参数为

要设定跟踪的轨迹为

仿真结果如图1所示。

图1 实际位置和期望位置Fig.1 Actual position and anticipant position
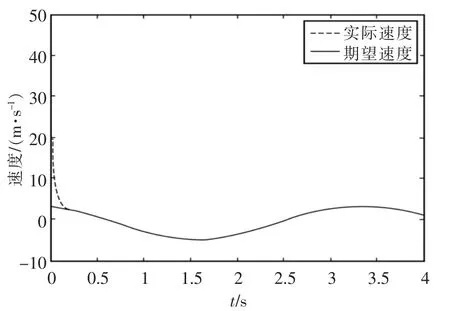
图2 实际速度和期望速度Fig.2 Actual velocity and anticipant velocity
4 结语
机电运动系统常常是受未知转动惯量和摩擦力影响的非线性系统,如何对这类系统进行快速准确的建模是当前研究的一个难点。另外,在实际应用中,电机的转速测量通常是通过编码器的定时后向差分来获得的,如何选择合适的采样周期来实现差分测速常常是一个很棘手的问题。本文针对摩擦力局部性的特点,提出了一种新颖的基于位置测量的快速辨识算法,并设计了基于动态尺度化的观测器的输出反馈控制,证明了闭环系统的收敛性。从仿真结果可以看出,本方法具有良好的性能。
[1]Tomizuka M.Zero phase error tracking algorithm for digital control[J].Journal of Dynamic Systems Measurement and Control—Transactions of the ASME,1987,109:65-68.
[2]Lee HS,Tomizuka M.Robust motion controller design for highaccuracy positioning systems[J].IEEE Transactions on Industrial Electronics,1996,43(1):48-55.
[3]Kim SJ,Ha IJ.A frequency-domain approach to the identification ofmechanicalsystems[J].IEEE Transactionson Automatic Control,2001,46:888-893.
[4]Selmic RR,Lewis FL.Neural-network approximation of piecewise continuousfunctions:application to friction compensation[J].IEEE Transactions on Neural Networks,2002,13(3):745-751.
[5]Canudas de Wit C,Olsson H,Astrom KJ,et al.A new model for control of systems with friction[J].IEEE Transactions on Automatic Control,1995,40:419-425.
[6]Makkar C,Hu G,Sawyer WG,et al.Lyapunov-based tracking control in the presence of uncertain nonlinear parameterizable friction[J].IEEE Transactions on Automatic Control,2007,52(10):1988-1994.
[7]Bona B,Indri M.Friction compensation in robotics:an overview[C]//44th IEEE Conference on Decision and Controland European Control Conference,2005:4360-4367.
[8]Ljung L.System Identification:Theory for the User[M].2nd ed.Englewood Cliffs,N J:Prentice-Hall,1999.
[9]Lei H,Lin W.Universal adaptive control of nonlinear systems with unknown growth rate by output feedback[J].Automatica,2006,42:1783-1789.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
防爆电机(2020年4期)2020-12-14
北京航空航天大学学报(2020年10期)2020-11-14
——编码器
演艺科技(2020年7期)2020-08-13
制造技术与机床(2017年7期)2018-01-19
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年24期)2017-02-02
