定日镜正北方向的校正算法及仿真分析
2015-03-14 09:01王魏
上海电气技术 2015年4期
王 魏
上海电气集团股份有限公司 中央研究院 上海 200070
定日镜正北方向的校正算法及仿真分析
王魏
上海电气集团股份有限公司 中央研究院上海200070
摘要:针对定日镜场中正北方向标定存在的误差展开了研究,通过原理分析,得出正北方向的误差对光斑中心点的偏移带来的影响。在得到光斑中心偏移量后,通过搜索一维最优解的方法,求解出正北方向的误差,从而达到校正正北方向、提高定日镜精度的目的。通过仿真,验证了这一算法的有效性。
关键词:塔式热发电; 定日镜; 光斑中心; 误差校正; 最优解
Abstract:An examination was conducted aiming at the error during calibration of true north direction in heliostat field. The influence of the error in true north direction to the offset of the spot center was educed via principle analysis. After the spot center offset was obtained, by one-dimensional searching of optimal solution, it was available to solve the error in true north direction and achieve the objectives i.e calibration and correction of true north direction and improvement of heliostat accuracy. Finally, the simulation demonstrates the validity of this algorithm.
Key Words:Thermal Power Tower; Heliostat; Light Spot Center; Correction of Error; Optimum Solution
1引言
定日镜在塔式太阳能发电系统中主要用于收集太阳能,通常来说,定日镜以机械驱动方式将太阳光线投射至一个固定点,其投射的目标通常是一个物理存在的固定靶,也可以是一个固定的方向[1-]。采用高度角-方位角跟踪方式,工作在这种方式下的定日镜装有高度轴和方位轴,其中,方位轴垂直于地面作旋转运动,高度轴平行于水平面同时垂直于方位轴作俯仰运动。这种方式一般以笛卡尔坐标系(符合右手定则)为基本坐标系来建立针对镜场的坐标系,以XOY平面为地平表面,以Z轴方向为天顶(向上)方向,由于地平面包括东西南北4个方向,需规定X轴与Y轴的正方向同时符合右手定则,规定X轴正方向为正东方向,Y轴正方向为正北位置。而实际使用中,正北方向比较难以获得,例如,使用测量仪器测量正北时,受到当地测量环境的影响(主要是测量点磁场分布的影响),不同的仪器测量出的结果会有较大的差距(实验中,出现两个不同的仪器测量结果差7~8°的情况)。而正北方位如果出现误差,会直接导致定日镜旋转角度出现误差,从而导致光斑中心偏离目标中心,因此正北方位的误差是导致光斑中心偏离目标中心最主要的原因之一。
针对这一问题,笔者通过原理推导与数据的分析来纠正这一误差的影响。首先通过原理推导出正北方向的误差对光斑中心点偏移的影响;然后通过数据仿真验证其正确性;最后通过分析数据,纠正正北方向的误差,仿真验证该方法的有效性。
2原理推导
假设某个定日镜在某一个时间点转动到某一个指定的位置(这个位置由定日镜的方位角Ah以及定日镜的高度角hh来确定),并且由于太阳光线的照射(太阳光线照射的方向由太阳的方位角As以及太阳的高度角hs来确定)从而在靶子平面形成一个光斑,此光斑中心点可测得,这个光斑中心与靶子中心点之间的偏差也可测得。规定定日镜高度角为镜面法向量与观察者所在地的地平面之间的夹角的余角,而镜面方位角规定为镜面法向量在观察者所在地平面的投影与正北的水平线之间的夹角,太阳角度定义与定日镜角度定义相似。在忽略其它影响因素的条件下,认为此偏差由正北方向的误差而导致。通过两个中心点之间的偏差推算出正北方向的误差,从而纠正正北方向。
2.1 镜面中心点
在太阳入射到镜面反射光线至靶子中心的过程中,认为太阳光线之间都是平行的,且镜面是一个规则的几何体,因此认为光斑中心的光线是由镜面中心反射而来。在反射策略中认为,镜面中心与装置的旋转中心重合,且三维坐标系是以装置初始位置的镜面中心为原点所建立的,而实际装置中,旋转中心与镜面中心并不重合。

图1 定日镜整机装置
定日镜整机装置结构如图1所示,反射玻璃借助陶瓷片或者背板等粘接至支架上,支架安装于高度角及方位角执行机构之上,以便转动。方位角及高度角执行机构固定在立柱上,方位角执行机构带动支架作水平方向的转动,而高度角带动支架作俯仰运动,可见旋转中心与镜面中心有一段距离,实际测得此距离为26cm。为了分析方便,将坐标系原点由镜面中心移动至旋转中心,计算实际的镜面中心(光线反射点)坐标。
如图2所示,O点是装置的旋转中心,m点是镜面中心,由机械结构可知,向量Om为镜子平面的法向量,线段Om的长度为26cm。

图2 镜面中心
从m点向XOY平面作垂线mb,则Om在XOY平面的投影为Ob。由于定日镜高度角的定义就是镜面法向量与水平面的夹角,因此Om与Ob的夹角为装置高度角hh,则Od长度为:
Od=Omcoshh=26×coshh
(1)
同理,线段Ob长度为:
Ob=26×sinhh
(2)
而定日镜方位角定义为镜面法线在水平面的投影与正北方向的夹角,因此线段Ob与Y轴的夹角为太阳方位角Ah,则线段cb与Oc的长度可以求出:
cb=ObsinAh=26×sinhhsinAh
(3)
Oc=ObcosAh=26×sinhhcosAh
(4)
则镜子中心点的坐标为(Xm,Ym,Zm)
其中:
(5)
2.2 反射光线直线方程
太阳光线入射镜面,经镜面中心点反射的示意如图3所示。
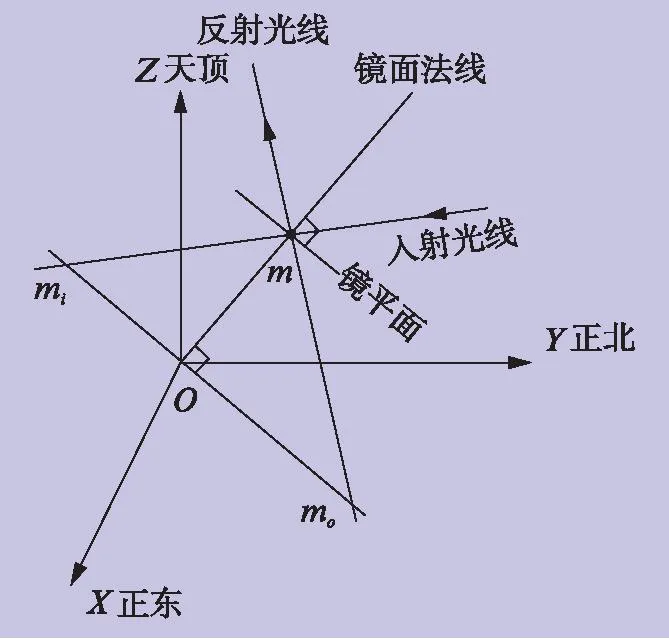
图3 光线反射示意图
图3中,太阳入射光线为直线mmi,经m点的太阳反射光线为直线mmo,直线mimo为经过原点与镜子平面平行的直线,分别于入射光线和反射光线交与点mi和mo。
由2.1节可知,直线Om的方向向量为:
Om=(xm,ym,zm)
(6)

图4 入射光线示意图
直线mmi的方向向量即为入射光线的方向向量,由图4可知:
mmi=(xmi,ymi,zmi)
(7)
其中:
(8)
则直线mmi的方程(过镜面中心点)为:
(9)
对于由入射光线和反射光线所组成的平面来说,其法向量垂直于向量Om以及向量mmi,因此这个平面的法向量为

(10)
直线mimo处于入射光线和反射光线所组成的平面内,且垂直于直线Om,则直线mimo的方向向量为:

(ymzn-zmyn,zmxn-xmzn,xmyn-ymxn)
直线mimo的方程(过原点)为:
(11)
求出直线mimo与直线mmi的交点,将式(8)与式(10)联立,可解得:
(12)
t1为式(10)中的参数,则可求出点mi的坐标,通过点mi的坐标可得出点mo的坐标,记为:
(xmo,ymo,zmo)
其中:
(13)
则直线mmo的方向向量mmo为:
(xm-xmo,ym-ymo,zm-zmo)
因此直线mmo的方程为:
(14)
2.3 光斑中心
在2.2节中所有的推导都基于原点在定日镜旋转中心的三维坐标系,而实际系统进行反射策略计算以及运行过程中,使用的是以装置初始位置的镜面中心为原点所建立的三维坐标系,这两个坐标系的关系为Z轴平移了26cm,其它不变。因此将2.2节中的结论变化到以定日镜初始位置的镜面中心为原点所建立的三维坐标系中,可知直线mmo的方程为:
(15)
在实际试验系统中,靶子平面与三维坐标系的XOY平面垂直,且其法线与Y轴的夹角为8°(北偏西),如图5所示。

图5 靶子平面在坐标系中的位置
由图5可知,此法线向量为:
(-0.1392,0.9903,0)
则平面方程为:
-0.1392x+0.9903y=671.01
(16)
那么光斑中心就是直线mmo与靶子平面的交点,联立式(14)与式(15)可得:
(17)
则可求得光斑中心的坐标为:
(18)

一维搜索是解函数极小值的方法之一,其解法思想为沿某一已知方向求目标函数的极小值点。一维搜索的解法很多,这里主要采用黄金分割法(0.618法),该方法用不变的区间缩短率0.618代替斐波那契法每次不同的缩短率,从而可以看成是斐波那契法的近似,实现起来比较容易,也易于人们所接受。
黄金分割法是用于一元函数f(x)在给定初始区间[a,b]内搜索极小点的一种方法,它是优化计算中的经典算法,以算法简单、收敛速度均匀、效果较好而著称,是许多优化算法的基础,但它只适用于一维区间上的凸函数,即只在单峰区间内才能进行一维寻优。
其基本原理是[10]: 依照“去劣存优”原则、对称原则以及等比收缩原则来逐步缩小搜索区间。具体步骤是: 在区间[a,b]内取点a1、a2,把[a,b]分为三段,如图6所示,如果f(a1)>f(a2),令:a=a1,a1=a2,a2=a+r(b-a);如果f(a1) 图6 黄金分割法举例 因为[a,b]为单峰区间,这样每次可将搜索区间缩小0.618倍或0.382倍,然后在保留下来的区间上作同样的处理,如此迭代下去,将使搜索区[a,b]逐步缩小,直到满足预先给定的精度时,即获得一维优化问题的近似最优解。 3应用仿真 取一组数据(表1)进行仿真,并将仿真结果与SolidWorks输出的结果进行对比。 表1 2015年7月31日7点的数据 将本文算法用MATLAB实现,并利用表1中的数据计算光斑中心,与SolidWorks的输出进行对比,结果见表2。 表2 SolidWorks与MATLAN输出对比 表2中,S输出代表SolidWorks的输出,M输出代表MATLAB的输出。从表2中可以看出,MATLAB的输出与SolidWorks的输出结果基本一致,可以证明该算法的有效性。 设置目标函数的表达式如下: (19) 式中:xm1、ym1、xmo1、ymo1、zmo1是指北方向出现偏差后的值,对应着北方向没有偏差时的xm、ym、xmo、ymo、zmo。 那么最优化问题为: x∈[a,b] 设置搜索区间为[-0.2,0.2],搜索精度为0.0005,结果见表3。 表3 正北方向误差求解 可见MATLAB的输出结果为北偏西0.0095和北偏东0.0095,与设定情况的北偏西0.01和北偏东0.01相差0.0005,迭代次数也较少。可见本文的方法能够较为方便地求解出正北方向的误差(搜索精度可调)。 4总结 塔式热发电中,正北方向的误差是引起光斑中心点偏移的主要原因之一。 针对正北方向的误差对光斑中心点的偏移带来的影响开展了研究,通过原理分析推导出光斑中心点,再通过搜索一维最优解的方法求解出正北方向的误差,最后使用MATLAB仿真工具,仿真了某种工况下已知光斑中心的偏移量,求解了出正北方向的误差,验证了以上算法的可行性及实用性。 参考文献 Purohit I, Purohit H. Techno-economic Evaluation of Concentrating Solar Power Generation in India . Energy Policy, 2010, 38(6): 3015-3029. 李文兵.定日镜传动系统精度分析与实验研究.重庆: 重庆大学,2012. Wang Wei, Li Shaoyuan. Model Predictive Control of 2-axis Solar Tracker for Solar Energy System. The 31th Chinese Control Conference, Hefei,2012: 4177-4182. 王魏,程松,谢文韬.塔式太阳能定日镜聚光策略及其应用仿真.上海电气技术,2014(3): 35-40. 梅忠义,倪菱湖,刘向远.黄金分割法在物理实验中的应用——金割效应物理摆.大学物理实验,2006(2): 51-53. 张涛.“黄金分割”教学设计.辽宁教育,2004(5): 56-57. 孟斌,吴宏鑫.线性定常系统特征模型的证明.中国科学(E辑: 信息科学),2007(10): 1258-1271. 叶军.黄金分割与Fibonacci数列.数学通报,2004(10): 28-30. 吴宏鑫,王颖,解永春.非线性黄金分割自适应控制.宇航学报,2002(6): 19-26. [10] 解永春,吴宏鑫.黄金分割在自适应鲁棒控制器设计中的应用.自动化学报,1992(2): 177-185. 三部委: 共推光伏技术与产业升级加速 6月10日,工业和信息化部、国家能源局、国家认监委联合印发《关于促进先进光伏技术产品应用和产业升级的意见》,从市场引导、产品准入标准、财政支持、产品检测等方面提出具体意见和执行标准,以促进先进光伏技术产品应用和产业升级。 值得注意的是,三部委首次将“领跑者”计划准入标准进行量化,明确提出将以政策资金和政府采购方式对“领跑者”先进技术产品进行政策倾斜。 《意见》明确,国家能源局每年安排专门的市场规模实施“领跑者”计划,要求项目采用先进技术产品。2015年,“领跑者”先进技术产品应达到以下指标: 多晶硅电池组件和单晶硅电池组件的光电转换效率分别达到16.5%和17%以上;高倍聚光光伏组件光电转换效率达到30%以上;硅基、铜铟镓硒、碲化镉及其它薄膜电池组件的光电转换效率分别达到12%、13%、13%和12%以上。 《意见》明确,对于众多光伏企业担心的评价体系问题,将委托第三方检测认证机构进行全过程技术监测评价,在工程竣工验收时重点检查是否达到承诺的指标,在工程投产一年后进行后评估并公布评估结果。 文章编号:1674-540X(2015)04-056-06 中图分类号:TK513 文献标识码:A 作者简介:王魏(1986-),女,硕士,助理工程师,主要从事太阳能发电系统控制技术、工业过程控制方法研究工作,E-mail: wangwei22@shanghai-electric.com 收稿日期:2015年8月