
基于Pro/E的复杂机构运动仿真设计
2015-05-09 03:48柴树峰张学玲李玉兰任保全
军事交通学院学报 2015年11期
柴树峰,张学玲,李玉兰,任保全
(1.军事交通学院军事物流系,天津300161;2.北方通用动力集团有限公司六一六厂舰船动力部,山西大同037036)
对于复杂机构的设计,当前的研究方法主要是解析法,例如,利用图论研究机构的数综合,利用矢量法进行机构的分析与综合,利用矩阵变换进行求解,利用数值积分进行机械盈亏功计算等。但是,对于复杂的机构,这些解析计算过程是相当复杂的,常常由于难以建立正确的解析数学模型而无法获得较理想的解。并且,利用机构学的基本理论建立复杂机构的数学模型后,求解多个非线性方程组成的方程组的问题仍是复杂机构设计中一个难题,特别是精确求解5个以上非线性方程组成的方程组的问题更是难点[1-3],设计计算过程繁琐、效率低,往往需要对原型进行较大的简化并引入更多的假设,分析方法比较粗略,分析结果不够可靠、直观,只能用来对复杂机构的设计方案作定性的比较分析,而不能作定量的评价。
利用仿真的方法可以有效地解决上述问题,即按照机构的运动原理创建出运动模型,进一步对该模型进行仿真研究来确定合理的结构参数[4-5]。机构运动学分析是机构综合与力分析的基础,用一种直观、动态的方式表达运动过程。运动学仿真能有效地解决复杂机构的设计、分析、优化等问题,在不浪费材料的前提下,能用最短时间获得复杂机构的最优设计方案。
1 Pro/E运动仿真
1.1 Pro/E的机构运动仿真功能
现今主流的CAD/CAM/CAE一体化三维软件Pro/E,是参数化技术的最早应用者,在目前的三维造型软件领域中占有着重要地位,其作为当今世界机械领域的新标准得到业界的认可和推广。Pro/E三维模型的几何特征有严格的数据定义,不仅具有强大的复杂零件造型和数控加工编程功能,还具有全相关性、基于特征的参数化造型、数据管理、装配管理等优势[6]。
Pro/E软件的机构分析模块(mechanism)包括运动仿真、机构分析两个功能,可以进行机构的运动学、动力学仿真分析。利用机构分析模块,当各个零部件通过装配模块组装成一个完整的机构后,就可以根据设计意图定义机构中的齿轮副或凸轮副等连接关系,设置伺服电动机作为机构的动力来源;如果机构运动复杂,还需要添加弹簧、力、转矩等其他设置,然后运行各种机构分析,如位置、运动学、动态等,并可根据测量分析获得结果报告。
当分析机构的运动时,可以观察并记录分析过程,或测量位置、速度、加速度、力等量,然后以图形形式表示这些量。也可以创建轨迹曲线和运动包络,用物理方法描述运动。通过输出动画形式、参数形式,观察机构的整体运动轨迹和各零件之间的相对运动,检测干涉情况,再根据仿真结果对所设计的零件进行反复修改,直到满足设计要求。
1.2 机构运动仿真过程
机构运动仿真就是根据给定的原动件规律,求出其他机构的运动参数。
机构仿真周期主要由总体方案设计、建立模型、求解模型、输出结果和调整模型重新分析设计几部分构成。机构运动仿真过程如图1所示[7]。

图1 机构运动仿真过程
2 复杂机构设计和运动分析实例
对于设计的复杂机构能否满足功能和性能要求,需要检验,尤其是对运动速度、加速度等要求较高的机构,在静止情况下不能直观看出运动性能指标,需要进行运动仿真分析。
槽轮机构是一种典型的复杂间歇运动机构,广泛应用于机械传动装置中,传统的槽轮手工设计通常用二维工程图表示三维实体模型,不能直观逼真地显现出槽轮的结构特征。同时,用该方法生成的模型几何数据不能直接用于模具设计、有限元分析、机构运动分析、计算机数控加工,要做大量反复的分析与计算,设计效率低[7]。
以槽轮机构为例,基于Pro/E软件进行结构设计和运动仿真分析。根据功能要求设计一个外槽轮机构,由支架、主动轮和槽轮组成(如图2所示)。槽数z=4,给定中心距a,设计该槽轮机构,使其能满足主动轮做匀速连续转动时,槽轮做作反向的间歇转动。
2.1 理论设计计算
根据槽轮机构几何关系,进行零件尺寸计算[8],可得
从动轮运动角为

图2 槽轮机构示意

主动轮运动角为

圆销回转半径为

槽轮槽口回转半径为

圆销半径(轮槽宽)为

锁止弧半径为

式中Kx为锁止弧半径系数,当 z=4时,Kx=0.35。
当圆柱销数 k=1、中心距 a=130时,由式(1)—(6)得到:从动轮运动角 β=45°,主动轮运动角 α=45°,圆销回转半径 R1=91.92,槽轮槽口回转半径R2=91.92,圆销半径r≈15,锁止弧半径Rx=64.34(以上长度均为当量单位)。根据可以确定的设计计算结果,得到外槽轮机构各个零件的示意图(如图3所示)。
2.2 运动学分析
要进行运动学分析,首先需要创建零件模型,把根据设计理论计算出的机构尺寸数据输入到Pro/E中,创建出零件三维模型,其次,对零件模型进行装配。图4为创建的外槽轮机构,由带圆销的主动轮、具有径向轮槽的槽轮和支架组成。主动轮绕轴O1做匀速运动,在圆销未进入槽轮的径向槽时,主动轮的凸圆弧进入槽轮的凹圆弧,槽轮因受到凹凸两弧的锁合而保持静止;当主动轮的圆弧运动至槽轮内凹弧的中点时,凹凸两弧的锁止作用终止,主动圆销进入槽轮的径向槽开始驱动槽轮,使槽轮绕轴O2转动;当圆销脱离槽轮的径向槽时,主动轮的外凸弧又将槽轮锁住,槽轮又停止运动。

图3 槽轮机构示意
图4 槽轮机构传动
根据理论设计出的槽轮机构,能否正确啮合以及能否满足所要求的运动形式还未知。为检验该槽轮机构的运动情况,就要对其进行运动学仿真分析和干涉检查,以进一步验证之前的理论设计。
(1)运动副设置。主动轮在O1点,槽轮在O2点,分别设置转动副,圆销与轮槽、主动轮外圆与槽轮锁止弧之间为高副连接,可设置为“凸轮副”。
首先,使主动轮的圆销面与槽轮的轮槽面相对齐,把当前设置状态作为初始位置做成快照Snapshot1,以备在后面仿真过程中使用。进入机械设计环境,检测模型连接成功后,再对装配好的槽轮机构创建凸轮连接,需要建立两个“凸轮副”,分别为槽轮的轮槽与圆销之间和槽轮的4个大圆弧面与锁止弧之间的凸轮副,且均选中“启用升离”。
之后,定义伺服电动机,选择主动轮的连接轴作为伺服电动机的驱动对象,并且规定电动机的正确转动方向,设定轴的当前位置为初始角位置,定义伺服电动机的速度为50(°)/s。
最后,进行运动分析定义,在仿真类型中选择“运动学”选项,可以得到机构的运动情况。定义模拟时间为100 s。在初始配置中选择之前设置的快照Snapshot1,以保证运动的起始位置是正确状态。单击“运行”,查看设置好的槽轮机构的运行情况。
(2)运动干涉检查。在上一步建立的运动仿真下,可以检查槽轮机构中各个零件的干涉情况。在“碰撞检测设置”里选择“全局碰撞检测”,即检查整个组件中的各种碰撞,并根据所选择的选项将其指出。待干涉检查完毕,在动画模式下,可以看到槽轮机构的整体运转情况良好,未发现代表干涉的红色线条和区域,表示不存在干涉情况或者干涉较轻,可以忽略(如图5所示)。如果存在干涉,可以按照式(7)—(10)调整设计参数,如圆销半径、槽底高、槽深、拨盘的轴径、槽轮的轴径等,直到满足设计要求。
槽底高为

槽深为

拨盘的轴径为

槽轮的轴径为

(3)运动分析。令模型运转一次停止,可以看到装配机构的整体运行情况良好。分别定义测量槽轮转速、主动轮转速、槽轮角加速度、主动轮角加速度,运行结束后系统将自动计算,并显示出当前最终运行结果值,也可自动生成各个变量的测量结果图形。本实例两个主要零件的转速变化曲线如图6所示。

图5 干涉检测
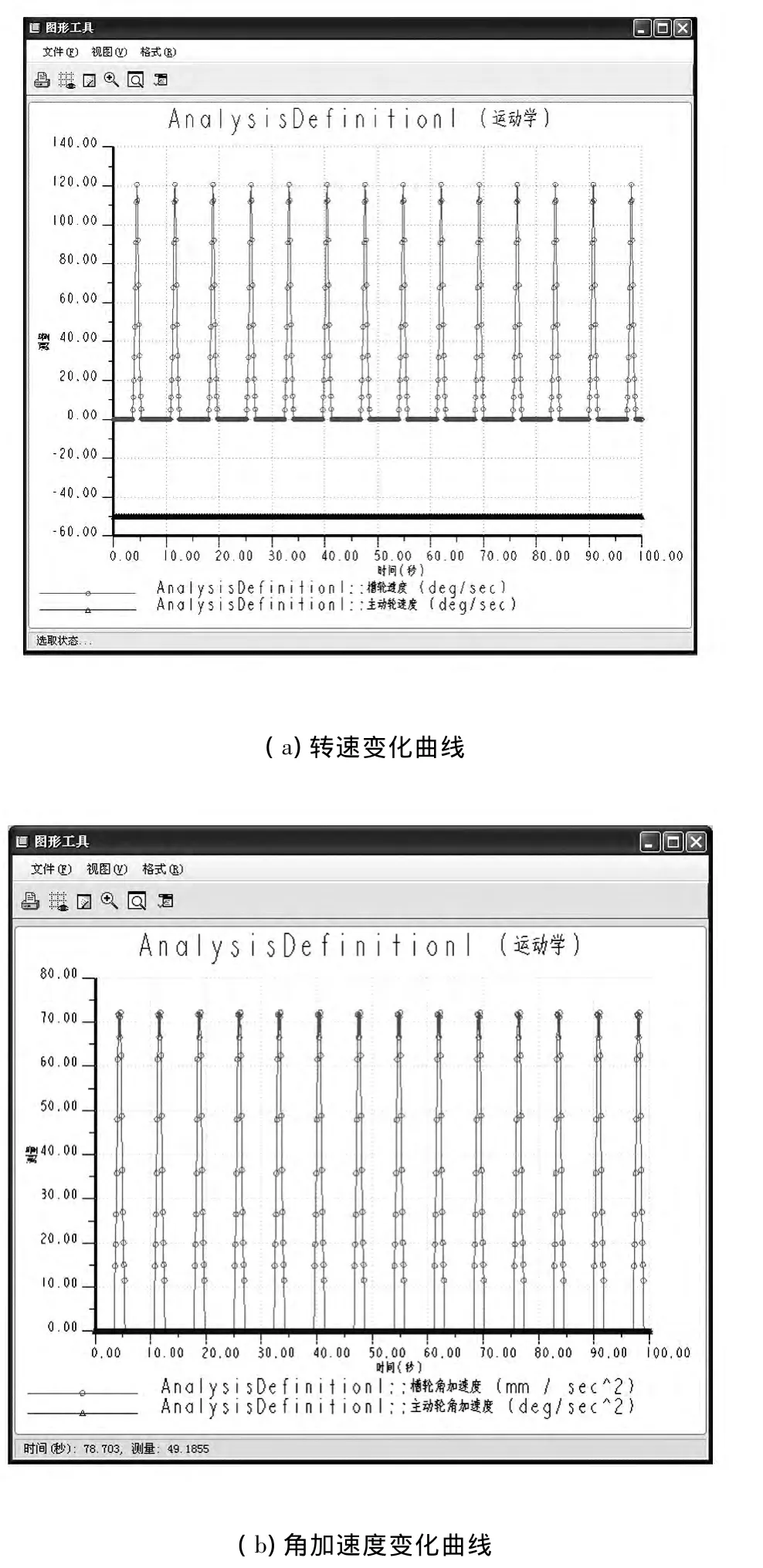
图6 输出测量结果图形
可以看到最终的测量结果是当主动轮的转速为50(°)/s时,槽轮的转速按一定曲线规律变化,主动轮角加速度为0,槽轮角加速度与其转速类似,也是按一定曲线呈有规律的变化。并且,当主动圆销开始进入和离开径向轮槽的瞬时存在有刚性冲击。因此,该槽轮机构做间歇运动,其转速、角加速度的仿真结果均与预期相符,满足设计要求。
在实际设计中,当增加圆柱销个数时,运动曲线变化频率就会增加,也可以调整某些设计参数,直至速度、加速度曲线满足特定要求。
3 结语
通过以复杂机构设计中常见的槽轮机构为例,在理论设计后,再进行运动仿真,并对仿真结果进行分析,体现了在仿真环境下进行机构运动仿真设计的优越性,不但能使机构的造型形象化、可视化,而且也使整个设计过程更加准确、快捷。在实际工程应用中,设计人员可以使用上述方法建立复杂机构模型,进行运动学仿真分析,再根据仿真结果进行修改设计直至满足设计需求,从而提高对各类复杂机构的设计效率。教员在机械设计教学中,也可以通过结合复杂机构的运动仿真分析来帮助学员理解复杂机构的设计原理,加深其对复杂机构设计理论的认识,进而提高机械设计教学效果。
[1] 张春林.高等机构学[M].2版.北京:北京理工大学出版社,2006:4-7.
[2] 韩建友.高等机构学[M].北京:机械工业出版社,2004:2-8.
[3] 尹芳.复杂机构动力学仿真的结构建模法[J].武汉轻工大学学报,2014(3):53-56.
[4] 孙伟,李朝峰,刘杰,等.面向复杂机构设计的参数化仿真技术研究[J].东北大学学报(自然科学版),2008(9):1318-1321.
[5] 储伟俊,蔡晓文.应用反向动力学实现复杂机构运动的三维虚拟模拟[J].建筑机械,2004(6):70-72.
[6] 葛正浩,杨芙莲.Pro/Engineer Wildfire 3.0机构运动仿真与动力分析[M].北京:化学工业出版社,2008:2.
[7] 张海元,王晓英,侯成波,等.基于Pro/E槽轮机构建模及运动仿真[J].煤矿机械,2009(6):191-193.
[8] 柴树峰,张学玲.机构设计及运动仿真分析实例[M].北京:化学工业出版社,2014:2-3,172.
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
绿色科技(2019年22期)2019-12-30
高考·上(2019年1期)2019-09-10
电子制作(2019年15期)2019-08-27
股市动态分析(2016年23期)2016-12-27
股市动态分析(2016年7期)2016-09-29
股市动态分析(2016年4期)2016-09-29
股市动态分析(2016年29期)2016-08-04
冰雪运动(2016年5期)2016-04-16
科技资讯(2014年23期)2014-10-20
