
干式离合器台架执行机构模糊滑模控制
2015-06-09 12:34赵治国郑争兴李学彦
机械与电子 2015年9期
赵治国,何 露,郑争兴,李学彦
(同济大学新能源汽车工程中心,上海 201804)
干式离合器台架执行机构模糊滑模控制
赵治国,何 露,郑争兴,李学彦
(同济大学新能源汽车工程中心,上海 201804)
0 引言
由于干式(电动)离合器动作灵敏、响应快且控制精度较高,已被广泛应用于机械式自动变速器(AMT)和干式双离合器式自动变速器(DCT)。但由于离合器磨损、执行机构存在强非线性以及外界干扰,使得离合器执行机构的控制精度难以保证。谢先平等[1]提出了一种专家PID算法,基于专家经验,根据离合器位置误差以及位置误差的变化率不断修正PID参数,动态控制性能也明显改善;赵永胜、吴光强等[26]以无刷直流电机为离合器执行机构,设计了滑模变结构控制器,并分析了控制器对外部扰动的鲁棒性,取得了较好的仿真效果,但是这些控制器的控制输入量包含分离轴承位置信号的三阶微分,在实际中实现较为困难。为此,基于五速干式DCT,结合台架试验用干式电动离合器,建立了离合器系统动力学模型,进行了硬件在环仿真试验。
1 离合器执行机构动态建模
离合器执行机构由有刷直流电机、一级齿轮减速机构、螺旋传动助力机构、膜片弹簧与压盘组成。电机输出端经过一级齿轮减速到丝杠螺母输入端,丝杠螺母的螺旋传动机构将电机的旋转运动转换成螺母的直线运动,再由螺母推动推动分离轴承,实现离合器的分离或者结合。离合器执行机构如图1所示。1.1 离合器作动电机建模
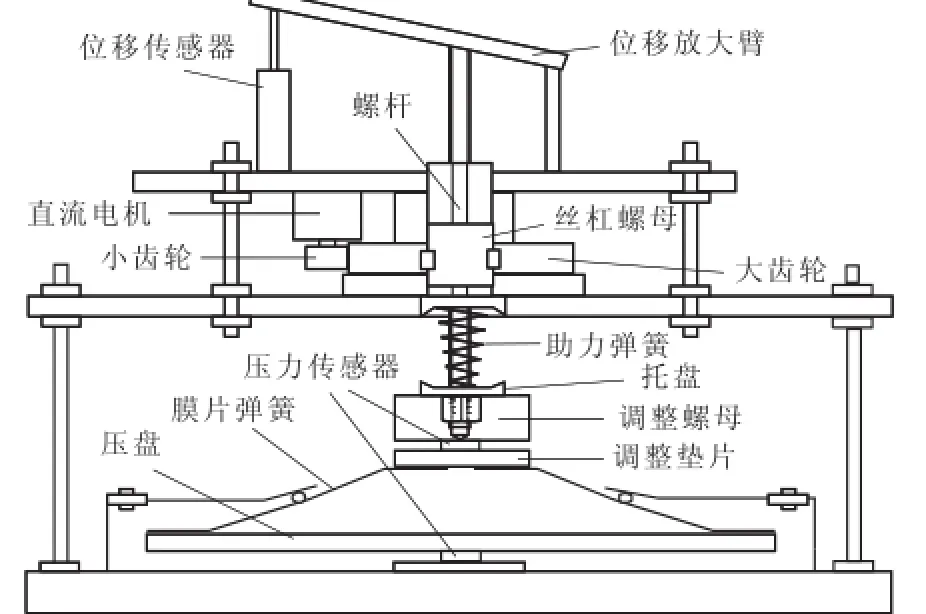
图1 离合器执行机构
五速干式DCT的离合器执行机构的驱动电机为有刷直流电机,电机的等效电路如图2所示。
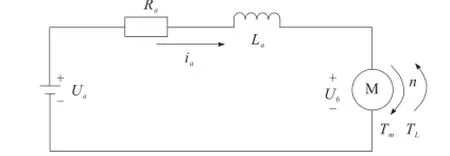
图2 电枢控制式直流电动机等效电路
根据基尔霍夫定律以及力矩平衡方程,可得:

Ua为电机的端电压;Lo为电机电感;Ub为电机感应反电动势;Kb为反电动势常数;ω为离合器电机角转速度;Imo为折合到电机轴上的等效转动惯量;bmo为电机转子阻尼系数;TL为负载转矩。
考虑到直流电机的电感很小,忽略其影响,电机的力矩方程可整理成:
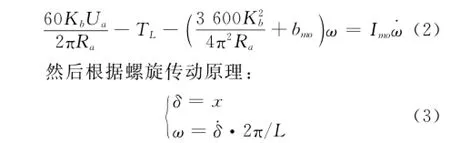
δ为执行电机输出端丝杠行程;x为离合器膜片弹簧小端位移;ω为电动机转速;L为螺杆螺纹导程。
联立式(2)和式(3),可得出离合器小端位移x与电机电压Ua的关系方程:

1.2 电机负载模型
图3与图4分别为离合器分离与结合时丝杠螺母的受力分析示意图。
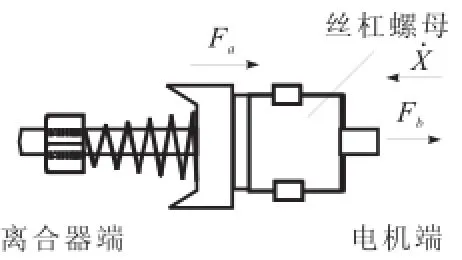
图3 离合器分离时螺母受力图
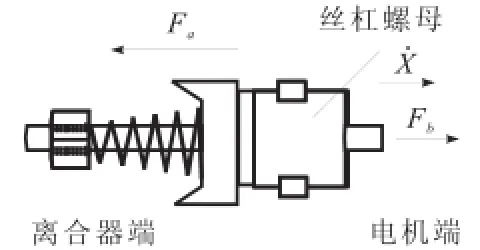
图4 离合器接合时螺母受力图
由于电机输出端经过一级齿轮减速机构传递到丝杠螺母上,设齿轮机构的传动比为i1,则实际电机输出端的等效负载力矩TL为:

设螺旋助力弹簧的助力为Fa;分离轴承反作用于螺母上的力为Fb对。则螺旋弹簧的作用力与丝杠行程δ的关系:

ks为螺旋弹簧弹性系数;x0为螺旋弹簧初始安装压缩量;x1为离合器彻底分离后压盘具有最大升程时螺旋弹簧剩余的压缩量。
再对丝杠螺母进行受力分析[7]:

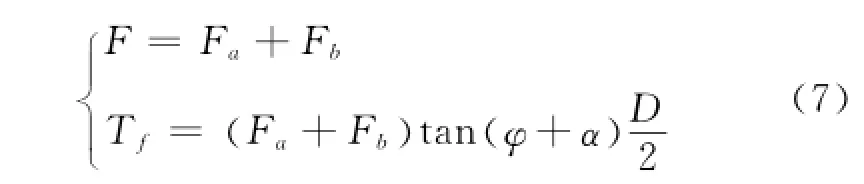
由于采用常闭式离合器,考虑到助力弹簧始终处于压缩状态,当离合器分离时,螺旋弹簧助力和分离轴承给螺母的力与运动方向相反:
当离合器结合时,螺旋弹簧助力与螺母运动相同,分离轴承施加螺母的力与运动方向相反:
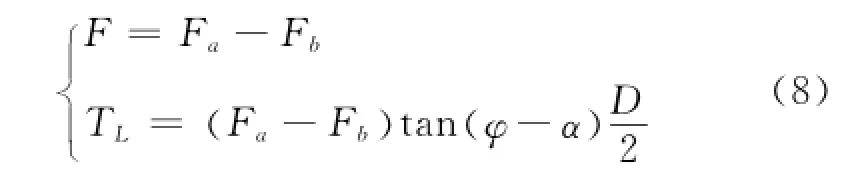
D为螺杆平均直径;φ为螺杆当量摩擦角;α为螺杆螺纹升角。由于选择的螺旋传动具有自锁特性,故可以保证φ>α。
2 模糊滑模变结构控制器设计
2.1 滑模变结构控制器
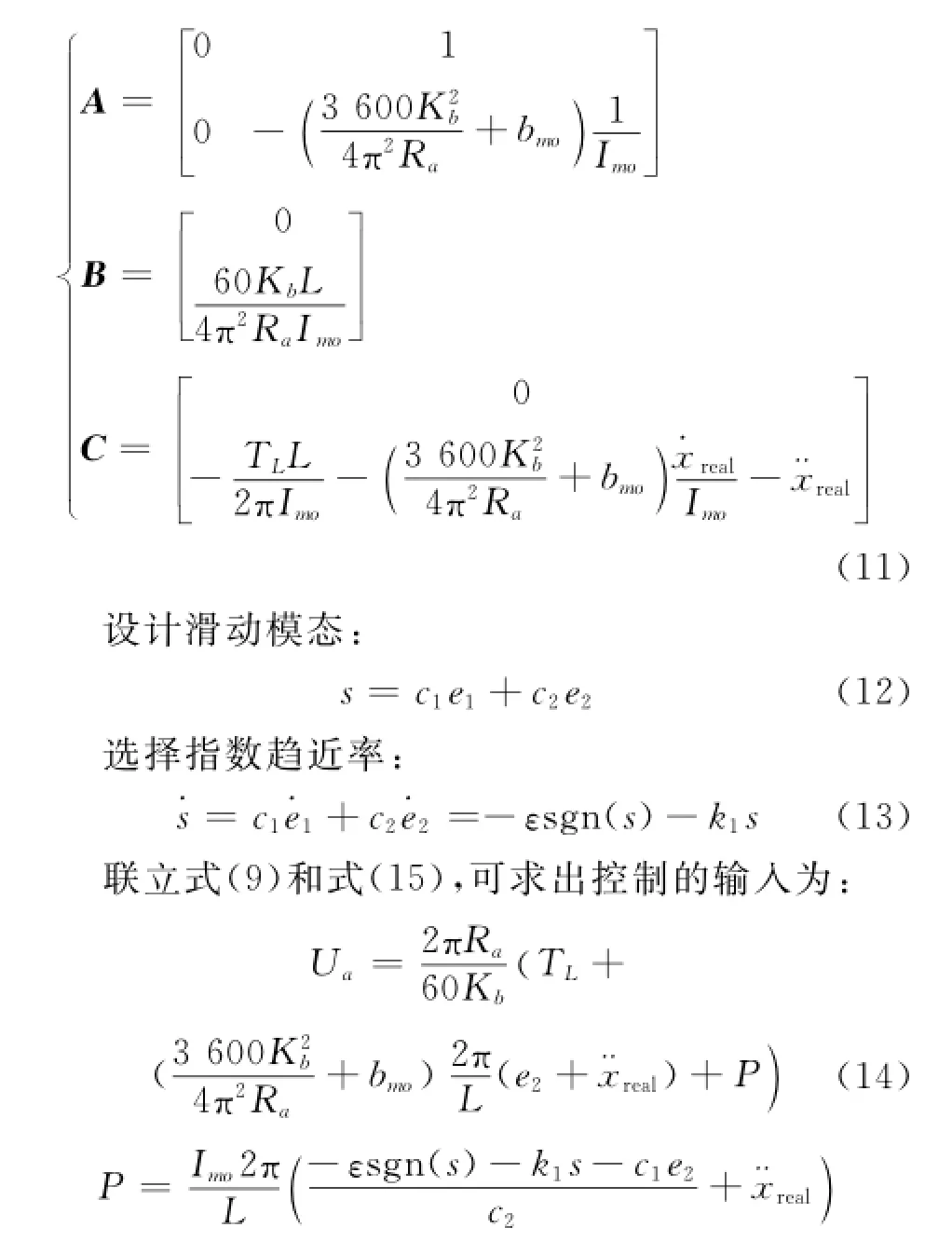
基于前述对离合器执行机构的分析可知:

2.2 模糊控制器
滑模变结构控制系统不易受到系统参数和外部扰动,然而由于外界干扰以及系统建模不精确等原因,一方面导致系统在跟踪精度上存在一定的误差,另一方面在进入滑模面后控制量并非严格按照滑模曲线滑动,而是沿滑模面抖振。为了解决以上2个问题,通过设计模糊控制器来补偿负载建模误差,同时削弱系统稳态时的抖振,从而提高系统稳定性与控制精度[8]。模糊滑模控制系统结构如图5所示。
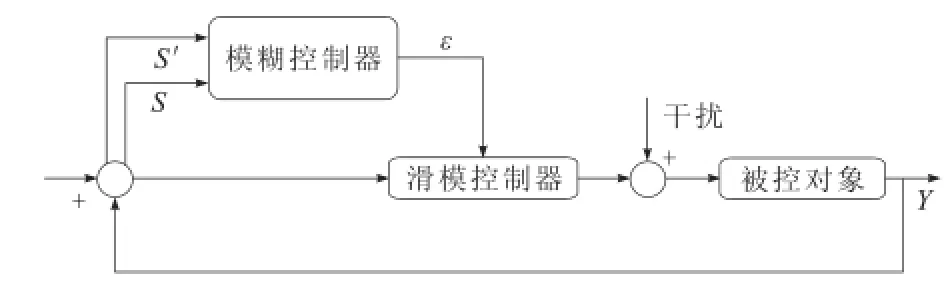
图5 模糊滑模控制系统结构
模糊控制器的输入变量为跟踪误差S与跟踪误差的变化率˙S,输出变量为趋近率参数ε。
2.2.1 输入语言变量取值和论域
跟踪误差S∈{很小(VS)、小(S)、中(M)、大(B)、很大(VB)},其论域为[0~5];跟踪误差的变化率˙S∈{很小(VS)、小(S)、中(M)、大(B)、很大(VB)},其论域为[0~5]。
2.2.2 输出语言变量取值和论域
趋近率参数ε∈{很小(VS)、小(S)、中(M)、大(B)、很大(VB)},其论域为[0~120]。
负载转矩修正量ΔT∈{很小(VS)、小(S)、中(M)、大(B)、很大(VB)},其论域为[0~0.3]。
2.2.3 模糊推理规则表及输入输出间映射关系
上述模糊控制器的输入和输出量均采用三角形隶属函数,根据控制经验,当跟踪误差S比较大时,系统状态远离滑模面,需要一个大的趋近律参数ε以加快趋近速度;反之当跟踪误差S与跟踪误差的变化率˙S都比较小时,则系统状态离滑模面较近,且变化趋势也靠近滑模面,此时需要一个较小的趋近律参数ε使趋近度变慢以减小抖振。基于上述经验,模糊推理规则如表1所示。对于负载转矩修正量ΔT,同样可以得到模糊修正关系,如表2所示。
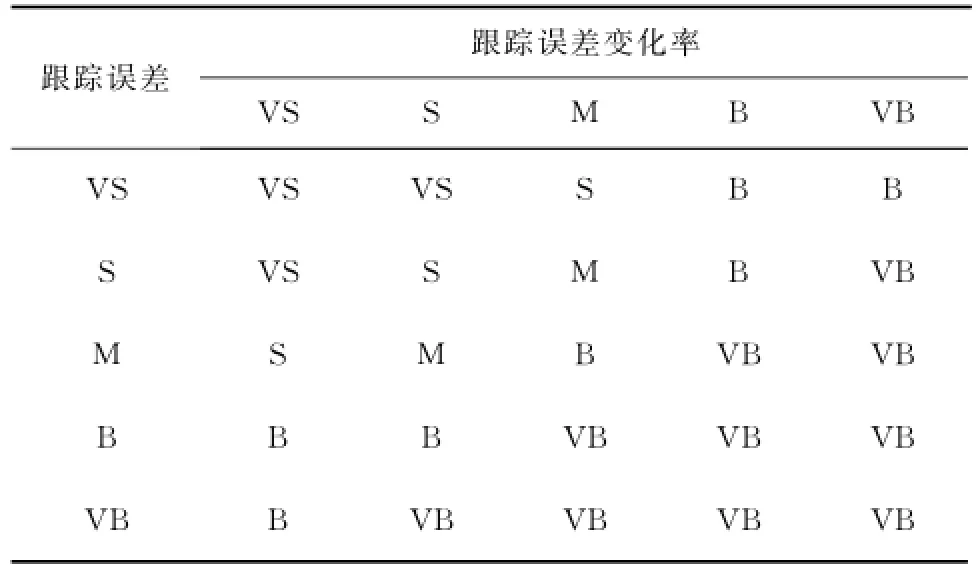
表1 趋近率参数模糊推理规则表
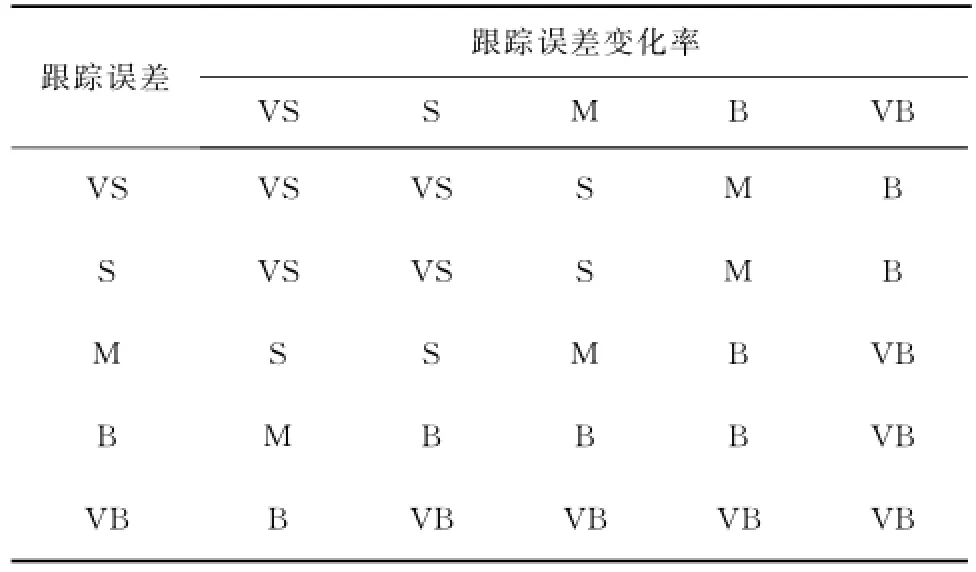
表2 负载转矩修正量模糊推理规则表
3 仿真结果及分析
为了观测离合器位置模糊滑模变结构器的跟踪效果,对干式DCT起步以及换挡过程的离合器分离轴承位置进行跟踪控制,并与传统的滑模变结构控制的效果进行了对比,其仿真结果如图6~13所示。
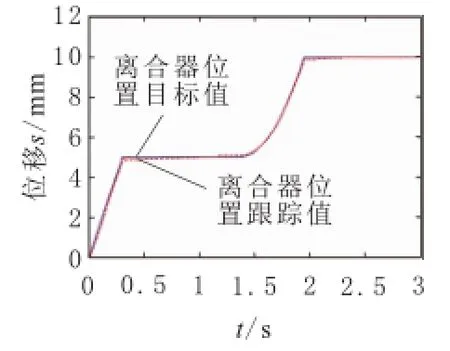
图6 起步过程离合器位置模糊滑模控制
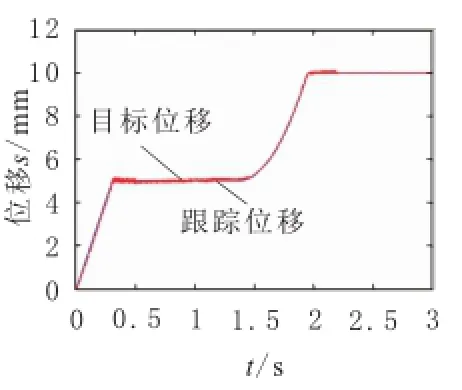
图7 起步过程离合器位置滑模变结构控制
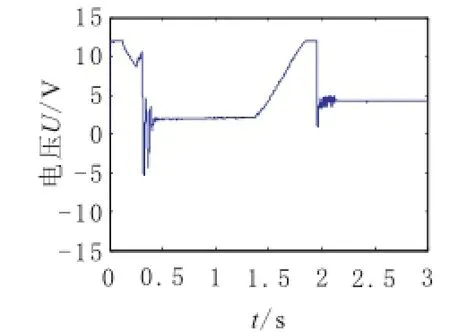
图8 起步过程离合器电机电压模糊滑模控制
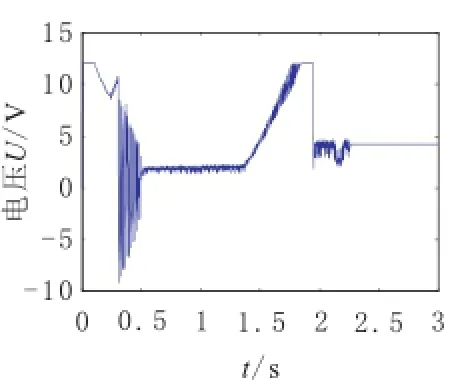
图9 起步过程离合器电机电压滑模变结构控制
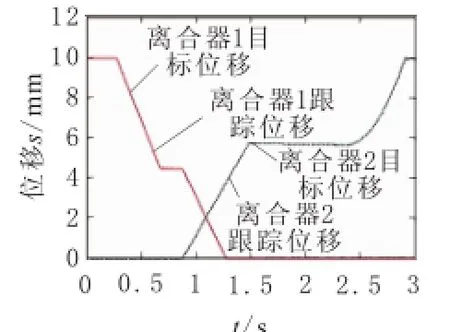
图10 换挡过程离合器位移模糊滑模控制
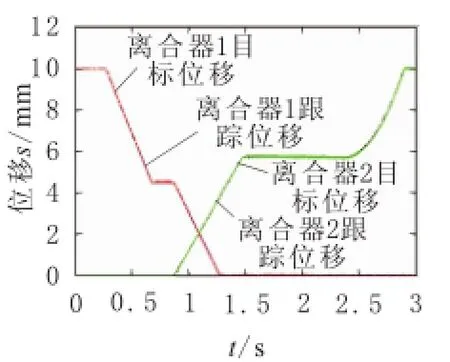
图11 换挡过程离合器位移滑模变结构控制
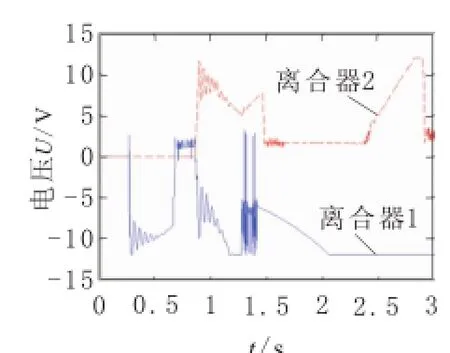
图12 换挡过程离合器电机电压模糊滑模控制
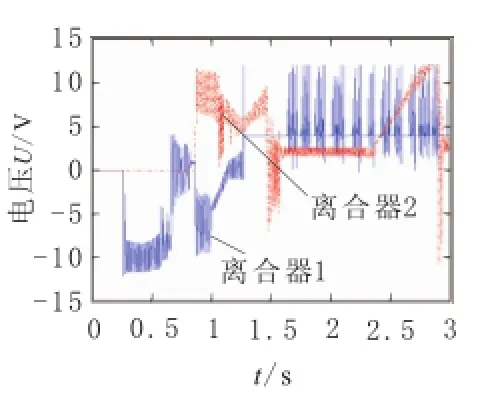
图13 换挡过程离合器电机电压滑模变结构控制
图6与图7分别是采用模糊滑模变结构控制以及传统的变结构控制,对干式DCT起步过程离合器分离轴承位移的跟踪图像。可以看出,采用模糊滑模控制的执行机构在稳态时的抖振明显减少,控制效果相比于传统的变结构控制有较为明显的提高。同时,在离合器分离轴承运动时,离合器位置跟踪效果较为理想,误差在5%以内。图8与图9是离合器控制电机的电压变化曲线,可以看出,在整个起步过程中,采用模糊滑模变结构控制的电机电压总体比较平稳。
由图10~图13可以看出,采用模糊滑模变结构控制的抖振明显减少,与此同时,离合器分离轴承位移的跟踪效果较为理想,误差在3%内。
4 硬件在环仿真试验验证
为了进一步验证离合器执行机构模糊滑模变结构控制的有效性,对其在台架上进行试验验证,台架试验的方案如图14所示。通过将模型自动代码生成后下载到TCU中,TCU输出电机电压来控制离合器电机的正反转进而控制离合器的接合,离合器位移信号反馈到TCU中实现离合器位移的闭环控制。
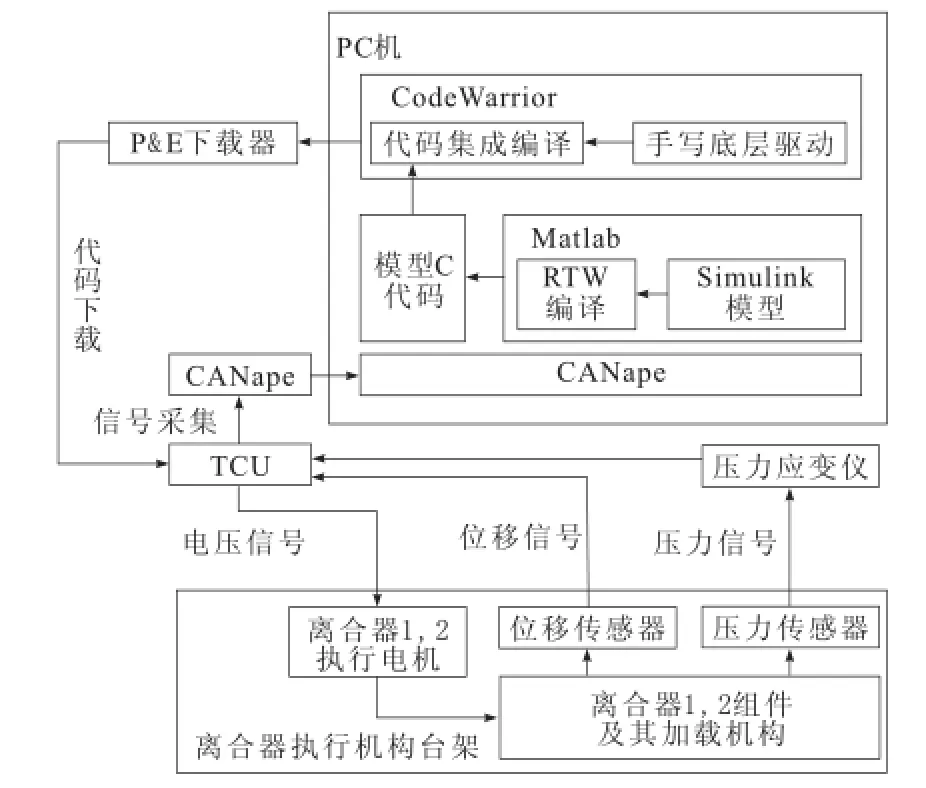
图14 台架试验方案
离合器执行机构试验台架主要包含2套离合器执行机构、3个同步器电机、换挡手柄、加速踏板和制动踏板等,其中,离合器执行机构基本采用与实车等效的结构。
基于上述台架,对干式DCT起步以及换挡过程离合器执行机构进行闭环试验,其结果如图15~20所示。
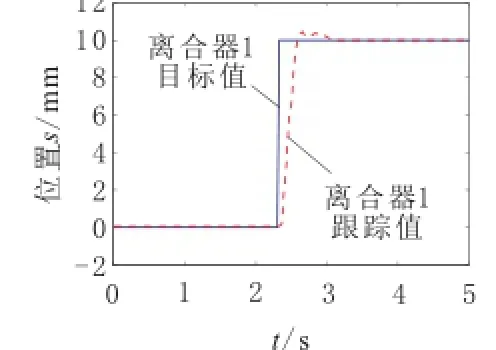
图15 离合器位置模糊滑模控制阶跃信号跟踪结果
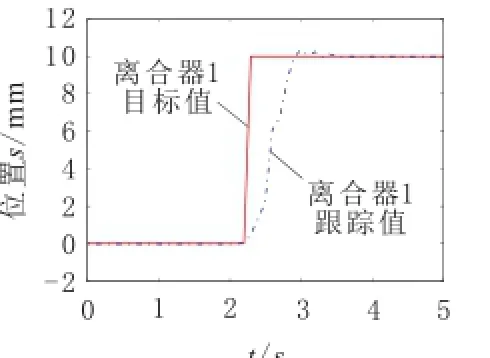
图16 离合器位置滑模变结构控制阶跃信号跟踪结果
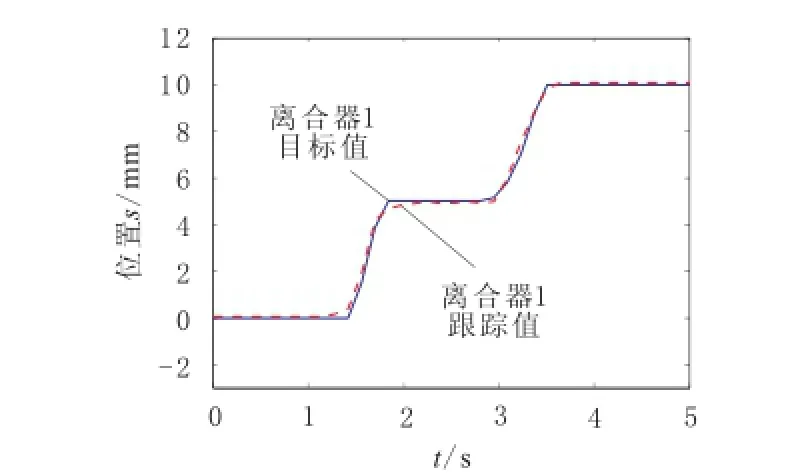
图17 起步过程离合器位移模糊滑模控制跟踪结果
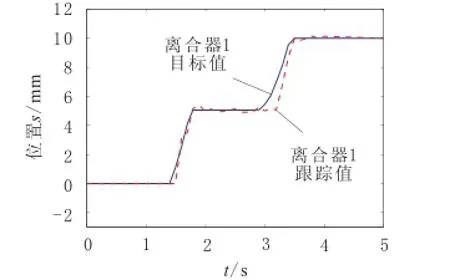
图18 起步过程离合器位移滑模变结构控制跟踪结果
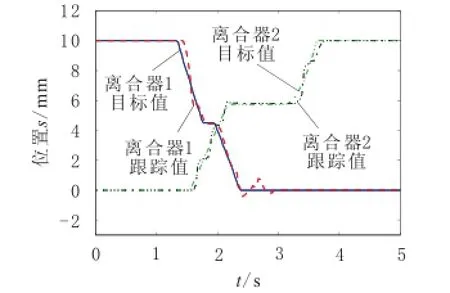
图19 换挡过程离合器位移模糊滑模控制跟踪结果
从图15和图16中可以看出,离合器实际位置与阶跃信号的变化趋势一致,但存在比较明显的滞后。
由图17~图20可以看出,采用模糊滑模控制的离合器执行机构的整体跟踪效果优于采用传统的变结构控制;同时,离合器执行机构实际位置基本上能够较好地跟踪起步及换挡过程中设定的离合器分离轴承位移的目标曲线,但还是存在着一定的误差,这主要因为离合器执行机构台架的加工和装配精度造成的。
试验结果表明,起步以及换挡过程离合器执行机构位置跟踪的误差都在8%以内,这也说明模糊滑模变结构控制算法能有效减小位置跟踪误差,同时减小了稳态过程中的抖振现象,具有良好的鲁棒性,可以满足离合器位置跟踪控制要求。
5 结束语
建立了台架试验用干式离合器执行机构动力学模型,为改善电动式离合器位置跟踪精度和鲁棒性,设计了模糊滑模变结构控制器并进行离线和硬件在环仿真试验。仿真及试验结果表明,所设计的模糊滑模控制器响应速度较快、鲁棒性强、跟踪精度高,同时减小了传统滑模变结构控制在稳态时的抖振问题,能够满足DCT车辆对离合器执行机构高性能的要求,具有一定的工程应用价值。
[1] 谢先平,王旭东,余腾伟,等.自动离合器精确位置跟踪控制与起步控制研究[J].中国公路学报,2008,21(4):117-121.
[2] 赵永胜,张云清,任卫群,等.汽车AMT自动离合器的改进模糊滑模控制[J].汽车工程,2006,28(8):750-754.
[3] 赵永胜,任卫群,张云清,等.汽车AMT自动离合器的局部线性化模糊滑模控制[J].农业机械学报,2007,38(1):17-21.
[4] 张德明,吴光强.模糊滑模变结构控制在DCT电控离合器上的应用[J].汽车技术,2007(10):1-6.
[5] Abdelhameed M M.Enhancement of sliding mode controller by fuzzy logic with application to robotic manipulators[J].Mechatronics,2005,15(4):439-458.
[6] Fung R F,Shaw C C,Wang A P.Region-wise linear fuzzy slidingmode control of the motor-mechanism systems[J].Journal of Sound and Vibration,2000,234(3):471-489.
[7] 成大先.机械设计手册[M].北京:化学工业出版社,2008.
[8] 刘金琨.滑模变结构控制Matlab仿真[M].北京:清华大学出版社,2005.
FuzzySlidingModeControlofDryClutchActuatoronTestBench
ZHAOZhiguo,HELu,ZHENGZhengxing,LIXueyan(CleanEnergyAutomotiveEngineeringCenter,TongjiUniversity,Shanghai201804,China)
基于五速干式DCT,搭建了干式离合器台架执行机构,考虑其非线性时变特征,设计了滑模变结构控制器,并利用模糊控制器实时补偿负载转矩同时调整滑模趋近律参数,以提高控制精度同时削弱滑模变结构控制稳态的抖振现象。结合双离合器式自动变速器(DCT)的起步与换挡过程,进行了硬件在环仿真试验。
干式离合器台架模拟机构;模糊滑模控制;硬件在环仿真试验;双离合器式自动变速器
Based on five speed dry DCT,a dry clutch actuator is built;and taking into account the nonlinear and time variable characteristics of the clutch actuator,a sliding model controller is designed.And the fuzzy controller is used to compensate the load torque and adjust approaching parameters of the system,so as to improve the control precision and minimize the effects of the vibration phenomenon during the steady state.Then the HIL(hardware in the loop)test is conducted based on starting and shifting process of the DCT(dual clutch transmission).
dry clutch bench simulation actuator;fuzzy sliding mode control;hardware in the loop test;dual clutch transmission
U463.212
A
10012257(2015)09002705
赵治国(1971-),男,陕西扶风人,教授,博士研究生导师,研究方向为车辆动力学控制、混合动力汽车系统集成控制及新型传动系统控制等;何 露 (1991-),男,湖南株洲人,硕士研究生,研究方向为双离合器自动变速器控制,通信作者。
20150515
国家自然科学基金资助项目(51275355)
猜你喜欢
天然气与石油(2022年5期)2022-11-01
天然气与石油(2022年4期)2022-09-21
汽车实用技术(2022年7期)2022-04-20
上海涂料(2021年5期)2022-01-15
昆明医科大学学报(2021年8期)2021-08-13
装备制造技术(2021年4期)2021-08-05
昆钢科技(2021年6期)2021-03-09
装备制造技术(2020年11期)2021-01-26
现代传输(2016年3期)2017-01-15
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
