
仿金花蛇躯体形变机构系统设计
2015-06-09 12:33姜祖辉冯宝林赵世标郑中山
机械与电子 2015年9期
姜祖辉,冯宝林,赵世标,郑中山
(1.中国科学技术大学工程科学学院,安徽合肥230026;2.中国科学院合肥物质科学研究院,安徽合肥 230031)
仿金花蛇躯体形变机构系统设计
姜祖辉1,冯宝林2,赵世标1,郑中山1
(1.中国科学技术大学工程科学学院,安徽合肥230026;2.中国科学院合肥物质科学研究院,安徽合肥 230031)
0 引言
随着航空航天技术的发展,在空间环境中分布的太空垃圾威胁和影响操作设备的安全。现有的空间展收装置(如绳索连接类型、马达驱动类型等)的展开方式,受限于传统的刚性结构,很难满足姿态调整的需要,也难以适应复杂的工作环境。由于金花蛇整个脊柱本身的变形属性,使其在空中滑行方式与其他动物不同,它身体的三维姿态在滑翔过程中不断变化[1]。换句话说,不断变形的蛇身有更多的自由度且能实现更快速姿态调整。强大的肌肉张力是实现快速响应的动力;与此同时,整个脊柱的结构可以实现其较大的变形[2-3]。在此,提出了一种新型具有较多自由度的线驱动仿生机构,可以在操作中有效地实现姿态调整。
1 仿生机构的设计
整个机构由多个模块化关节串联而成,采用并联线驱动结构[4-11]。如图1所示,模块化关节串联后,其末端通过螺钉紧固在基座上,8个绕线伺服电机固定在基座另一面。

图1 线驱动仿生机构整体装配图
在线驱动关节设计中,采用模块化关节设计。如图2所示,球副被拆分为俯仰副和旋转副串联,俯仰副设定为十字轴联接,但是考虑到对称性,分别在俯仰副的两端各加一个旋转副。
每个关节包含2个圆盘,4根弹簧,2根阶梯轴,
轴的一端插入轴承孔,通过万向节将两轴连接。关节的回复力用拉簧来提供,两圆盘通过外侧的安装孔由拉簧连接,并开有小孔以使驱动绳索穿过。因弹簧的弹性性能和万向节的变向功能,整个关节能作伸缩运动,也能向各方向摆动。
在整个机构中,主要有2种对称的绕线方法(螺旋式绕法和直线绕法)使得机构形变。图3a为螺旋式绕法,红色绳索和蓝色绳索分别对称地通过圆盘上的小孔,从左向右看,在空间上为螺旋形状(顺时针),同样的,还有一组相同的对称绳索逆时针穿过圆盘上的绕线孔(从左向右看),可以使得机构向反方向扭转;图3b为直线式绕法,4条绳索直接穿过绕线孔,来实现机构向相应的4个方向弯转。

图2 线驱动关节装配剖图

图3 2种绕法示意图
2 动力输入计算
作为主动机械装置的机器人,在原则上机器人的每个自由度都应该具有单独传动。从控制观点来看,机器人系统往往代表冗余的、多变量的和非线性的自动控制系统,也是一个复杂的动力学耦和系统。每个控制任务的本体就是一个动力学任务。由于拉格朗日法求解的简便性,本部分采用拉氏方程对机器人进行动力学建模。
2.1 设定机器人连杆系统基坐标系及建立拉格朗日动力学方程
拉格朗日函数L被定义为整个系统动能和势能的差,且整个系统的动能和势能为机器人各个连杆的动能和势能之和。
在机器人底部建立三维笛卡尔坐标系,并做如下简化:机器人关节中的旋转副和俯仰副合成一个球副,来连接相邻的2个连杆;机械关节的质量主要集中在圆盘中心处,因此连杆的质点被设置在连杆的中心。如图4所示。

图4 机器人简图


Mi为所求机器人关节处的广义力,在此为力矩。
2.2 求解相应机器人关节
本部分根据机器人的3种主要动作模式来分析和求解,在分析和求解的过程中,由于计算的复杂性,在动力学建模的过程中忽略重力和摩擦力对形变角的影响。为了方便求解,引入2个变量α和β,其中α和β分别表示机器人末端执行器在基坐标系的弯转角度和扭转角度。
2.2.1 径向弯曲模式
完成径向弯曲的动作,需要对相应方向的直线绳索进行拉伸,θ2i(i=1,2,3,4)代表相应关节弯转角;T代表绳索张力。在设定条件下,由于每一部分绳索的张力相同,整个机器人的变形速度不大,并且重力对于拉簧张力对机器人关节的变形角影响也很小,所以每个关节的弯转角可认为是相同的,且有:

如图5所示,力矩MiB为关节内绳索拉力和拉簧弹力的合成力矩为:


图5 弯曲模式下关节骨架

根据式(3)~式(6)联立方程组,即可得到Ti的表达式。
2.2.2 扭转模式
完成单纯的扭转动作,需要2根螺旋缠绕的绳索在同速下拉伸。θ2i-1(i=1,2,3,4)代表相应关节扭转角;T1、T2代表绳索张力。同样的,拉簧拉力、绳索的张力以及扭转角可做如下处理:


图6 在扭转模式下关节骨架
由胡克定律可得:

根据式(7)~式(11)联立方程组,即可得到绳索拉力的表达式。
2.2.3 扭转弯曲模式
在扭转弯曲模式下,机器人需要1根螺旋缠绕的绳索在匀速下拉伸。在图7的基坐标系中,θ2i-1和θ2i可由运动学反解得出[1213](因为本部分对建模
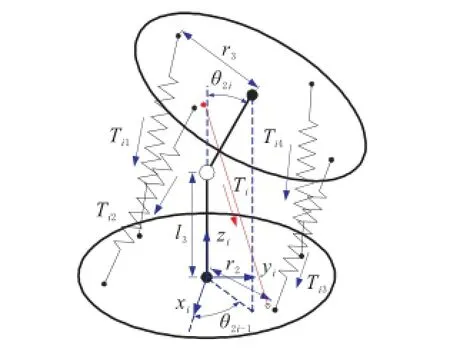
图7 弯曲扭转模式下关节骨架

根据式(13)~式(15)联立方程组,即可得到Ti的表达式。
3 控制平台设计与实验
3.1 系统概述
控制系统主要由上位机、PLC、伺服驱动器和伺服电机组成。上位机输入变量经由PLC处理后,通过驱动器对伺服电机执行控制,从而使得机器人完成相应的位姿。整个控制系统布局如图8所示。

图8 控制系统
整个系统初始化后,输入变量α和β,并转化为机器人位姿数据,通过PLC对电机驱动器发出指令,从而驱动电机,使得机器人完成相应动作。整个控制流程如图9所示。

图9 控制流程
3.2 实验
根据之前的样机设计,选定材料加工非标件,并对整个样机进行组装,整个实体样机如图10所示。对于非标件,为满足整个机构的强度以及轻量化要求,选材为航空铝材质7075;选定电机型号为安川SGMPS系列电机,配套驱动器型号为SGDVR70F,主控PLC为MP2300。控制箱电机组

图10 机器人样机
机器人的动作实现如图11所示。其中,图11a,图11b和图11c的输入变量(α,β)分别为(π/4,0),(0,π/4)和(π/4,π/4)。从图11可以看出,由于重力、绳索本身柔软度以及摩擦力的影响,在实际情况下,机器人每个关节的相应形变角度有所不同,从而导致最终机器人的位姿有少许的偏差,但此方法具有可行性。

图11 机器人动作实验
4 结束语
根据金花蛇的骨骼和肌肉系统的研究,设计了一种新型的线驱动机械机构,并对此机构进行动力学建模和控制系统设计。在动力学分析过程中,设定每个关节的形变角度近似相等,并引入新变量(α,β)简化最终结果表达式。在控制系统设计中,同样使用(α,β)作为变量输入,并对此进行实验,证明了可行性,从而对其他类似的线驱动机器人设计提供一种新的思路。
[1] Miklasz K,Labarbera M,Chen X,et al.Effects of body cross-sectional shape on flying snake aerodynamics[J].Experimental Mechanics,2010,50(9):1335-1348.
[2] Young B A,Kardong K V.The functional morphology of hooding in cobras[J].The Journal of Experimental Biology,2010(9):1521-1528.
[3] Bishop K L.The relationshipbetween 3-D kinematics and gliding performance in the southern flying squirrel[J].Journal of Experimental Biology,2006(4):689-701.
[4] Qian W,Mei T,Zhao J.Analysis on the configuration and simulation of a new robot composed with hybrid joints[C]//IEEE International Conference on Robotics and Biomimetics(ROBIO),2013:1838-1844.
[5] Dong X,Raffles M,Guzman S C,et al.Design and analysis of a family of snake arm robots connected by compliant joints[J].Mechanism and Machine Theory,2014,77:73-91.
[6] Hopkins J K,Spranklin B W,Guptand S K.A survey of snake-inspired robot designs[J].Bioinspiration&Biomimetics,2009,4(2):1-9.
[7] Hirose S,Yamada H.Snake-like robots[Tutorial][J].Robotics&Automation Magazine,2009,16(1):88-98.
[8] Li C,Rahn C D.Design of continuous backbone,cable -driven robots[J].Journal of Mechanical Design,2002,124(2):265-271.
[9] Jones B A,Mc Mahan W,Walker I D.Design and analysis of a novel pneumatic manipulator[C]//Proceedings of 3rd IFAC Symposium on Mechatronic Systems,2004:745-750.
[10] Xu K,Goldman R E,Ding J,et al.System design of an insertable robotic effector platform for single port access(SPA)surgery[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems,2009:5546-5552.
[11]Simaan N.Snake-like units using flexible backbones and actuation redundancy for enhanced miniaturization[C]//IEEE International Conference on Robotics and Automation,2005:3012-3017.
[12] Jones B A,Walker I D.Kinematics for multisection continuum robots[J].IEEE Transactions on Robotics,2006,22(1):43-55.
[13] Rolf M,Steil J J.Constant curvature continuum kinematics as fast approximate model for the Bionic Handling Assistant[C]//IEEE/RSJ International Conference on Intelligent Robots and Systems,2012:3440-3446.
System Design of Mechanism Based on Characteristics of Chrysopelea ornata Spine
JIANG Zuhui1,FENG Baolin2,ZHAO Shibiao1,ZHENG Zhongshan1
(1.Institute of Engineering Sciences,University of Science and Technology of China,Hefei 230026,China;
2.Hefei Institutes of Physical Science,Chinese Academy of Sciences,Hefei 230031,China)
提出了一种全新的基于金花蛇脊椎特性的形变机构,它可以实现扭转和弯曲等多种动作。受金花蛇脊椎空间变形特性的启发,分析金花蛇脊柱骨解剖学特征和肌肉分布特征,设计仿生机械机构。相对于传统的类似机构,本机器人采用线驱动,结构更加简单,拥有更多自由度且可以适应多种工作环境。并对此机构进行动力学建模和控制系统设计。
仿金花蛇躯体形变;机构设计;动力学;控制系统设计
This paper proposes a new design of mechanism based on the spine structure of the Golden Tree Snake(Chrysopelea ornata),which is capable of performing a wide range of motions,such as torsion and bending.Inspired by the Golden Tree Snake’s vertebrae spatial deformation characteristics and the anatomy of the snake’s spine and muscle distribution characteristics,this robot is cable-driven,and thus has more simple structure,more freedom and can be adapted to various working environment.In this paper,the mechanism design,dynamic analysis,control platform design and experiment are also presented.
mechanism based on characteristics of flying snake spine;mechanism design;dynamic analysis;control system design
TP242
A
1001-2257(2015)09-0076-05
国家自然科学基金资助项目(51275505)2个角接触轴承,2个轴承盖和1个万向节。圆盘上内外侧都均布着4个安装孔用于紧固轴承盖,角接触轴承安装在圆盘中心凸台的孔内,通过轴承盖使其轴向位置固定,将阶梯
姜祖辉(1987-),男,河北沧州人,硕士,研究方向为机器人、机械设计;冯宝林 (1972-),男,安徽合肥人,博士,副研究员,研究方向为仿生设计、机械设计,通信作者。
2015-04-13
猜你喜欢
铁道车辆(2022年5期)2022-10-31
散文诗世界(2022年1期)2022-01-13
黄河之声(2021年18期)2021-12-14
理化检验(物理分册)(2021年10期)2021-10-27
孩子(2019年7期)2019-07-29
当代陕西(2019年10期)2019-06-03
读友·少年文学(清雅版)(2018年8期)2018-12-06
陕西理工大学学报(自然科学版)(2018年5期)2018-11-06
汽车零部件(2017年8期)2017-12-18
边疆文学(文艺评论)(2017年5期)2017-06-07
