
玻璃幕墙清洗机器人爬壁运动控制系统设计
2015-06-09 12:34刘永平张世一蔺卡宾
机械与电子 2015年9期
刘永平,张世一,蔺卡宾
(兰州理工大学机电工程学院,甘肃兰州 730050)
玻璃幕墙清洗机器人爬壁运动控制系统设计
刘永平,张世一,蔺卡宾
(兰州理工大学机电工程学院,甘肃兰州 730050)
针对高层建筑玻璃幕墙清洗问题,开发了一种双层结构玻璃幕墙清洗机器人,对机械人本体结构及爬壁运动控制系统进行设计,以FPGA芯片为核心,对控制系统各部分硬件进行设计选型,并编写上位机控制软件。采用模糊PID算法对步进电机实现闭环控制,利用Matlab软件对步进电机进行了仿真分析。仿真结果表明,机器人运行状态稳定,具有较高的实用性。
机械结构;硬件设计;模糊PID;仿真分析;软件编程
0 引言
玻璃幕墙是现代高层建筑的主要装饰方法之一,但其清洗问题一直是困扰人们的一大难题,利用机器人清洗已经成为发展的必然趋势。
设计了一种玻璃幕墙清洗机器人[1]。机械本体采用双层交替运动的结构,可完成前进、后退、转弯动作。根据玻璃表面平整光滑的特点,采用真空吸附方式作为机器人在玻璃墙面的附着手段,利用步进电机作为机器人的驱动装置。控制系统选用FPGA作为控制核心,构建带有模糊PID算法的闭环控制系统,利用Lab VIEW软件编写上位控制程序,实现对机械本体运动的实时控制。
1 机器人机械结构设计
1.1 机械本体结构
高楼玻璃幕墙清洗机器人机械结构[2]如图1所示,在机器人作业过程中,通过吸盘组交替吸附墙面,实现上、下两层协调动作。当下层吸住时,上层向前移动,移动完成之后,上层吸住,下层脱离墙面向前移动,这样循环往复实现机械本体的直线运动。需要转弯时,上层吸盘吸住,下层相对上层旋转,随后下层吸住,上层旋转。通过前进、转弯2种运动的配合实现全方位移动。
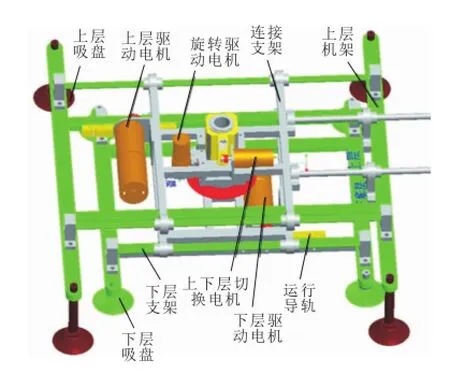
图1 玻璃幕墙机器人机械结构
1.2 各部分组成及功能
机械结构主要由吸附系统、移动系统、上下层切换系统和旋转系统4部分组成。吸附机构由真空吸盘、真空泵和电磁阀组成。通过真空泵抽气,使吸盘产生负压,机械本体吸附于玻璃幕墙表面。移动系统主要由上下层支架、移动导轨和步进电机等构成,移动时通过电机旋转带动机器人前、后运动。上下层切换机构主要由移动滑块、齿条导轨和步进电机等构成,通过电机正反转实现上、下层切换。旋转机构主要由旋转中心柱、旋转齿盘导轨、齿轮和步进电机等构成。实现上、下两层相对旋转。
2 机器人控制系统硬件设计
2.1 控制系统整体结构
根据机器人本体结构和控制性能的要求,玻璃幕墙机器人控制系统主要由检测机构、执行机构、核心控制板和带算法的上位控制程序4个部分组成,整个控制系统组成如图2所示。
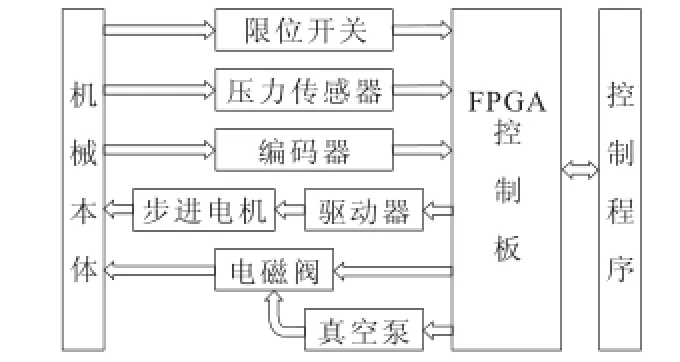
图2 控制系统结构组成
2.2 控制系统硬件组成
控制系统硬件包括检测装置、执行装置和核心控制板。
检测装置由STEDELE ME8104限位开关、压力传感器和3个KZP3808光电编码器构成,实现机器人运动过程中的数据采集处理[3]及反馈上位程序显示。限位开关和压力传感器均属于保护装置,当本体运动至极限位或墙面附着力过小时,保护装置被触发,机械本体立即锁定在墙面。编码器分别采集3个步进电机输出信号,并将信号反馈至控制板完成闭环控制。
执行装置由57BYGH78系列步进电机[4]和电磁阀构成。4个步进电机分别完成上层前进、下层前进、转弯和上下层切换的功能,其中上、下层前进及转弯电机配光电编码器。2个电磁阀负责完成上下2层气路的切换。
核心控制板需要具有模拟信号采集处理、任意频率TTL输出、数字IO和总线通讯等功能。FPGA芯片集成内嵌乘法器[5]和运算电路,是作为核心处理元件的最佳选择。故根据设计需求搭建控制电路,FPGA控制板整体结构如图3所示。
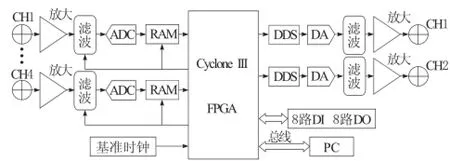
图3 FPGA控制板结构
2.3 控制板功能
控制板并行采集3个光电编码器和1个压力传感器的4路模拟信号,经放大和A/D转换后存入静态随机存储器SRAM,可根据需要延时读取。输出部分在基准时钟作用下于DDS内部合成所需频率的数字波形[6],经过D/A转换和滤波器处理生成所需的TTL开关信号,信号放大后用于驱动步进电机。DIO数字接口中限位开关信号通过DI输入,电磁阀开关信号通过DO输出。由于4个步进电机共用1个驱动器,DO口根据上位程序命令把即将动作的步进电机接入驱动器电路,完成电机驱动信号的切换。控制板FPGA芯片内部集成总线通讯模块,通过总线连接完成与上位程序的指令信息传递。
3 闭环控制部分建模仿真
机器人主要动作是由步进电机驱动,要实现对机械运动的精确控制,必须保证步进电机的运行精度,因此,设计带算法的步进电机闭环控制系统,并对其仿真分析。
3.1 步进电机数学模型
控制系统选用二相混合式步进电机,不计永磁体回路漏磁、定子极间和端部的漏磁,忽略磁滞和涡流的影响,忽略饱和的影响,两相混合式步进电机的电压平衡方程[7]为:


UA,UB为施加在两相绕组上的电压;rA,rB为两相绕组的内部绕组;wr为电机转子的机械角;ke为电机运行时的反电动势;L0,L2分别为电机绕组自感的平均分量和基波分量。
两相混合式步进电机的转矩方程为:

J为转动惯量;B为粘滞摩擦系数;TL为负载转矩。
根据式(1)~式(3),在Matlab/Simulink中搭建步进电机仿真模型。输入电机两相电压UA、UB与负载转矩TL后,经过计算可得到电机的输出转矩Te,两相电流iA、iB,转速wr,转角θ。
3.2 模糊PID控制模型建立
从数学模型可以看出,步进电机是高度非线性对象,因此运算部分将模糊控制和常规PID控制结合起来,构建模糊PID控制[8]算法。在模糊控制器中,将偏差和偏差变化率作为输入量,然后对其模糊化处理,并按照电机特点设定的模糊控制规则进行模糊决策,最后经过解模糊处理和比例变换,得到PID控制器相关参数,从而获得模糊PID控制器输出量。Matlab/Simulink中建立模糊PID模型如图4所示。
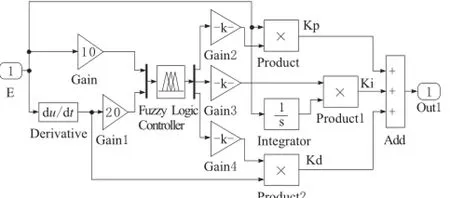
图4 模糊PID仿真模型
3.3 建模仿真与结果分析
混合式步进电机本身具有低频振荡问题,为保证运行精度,只能通过细分控制减小每步前进角度的方法解决。系统选用2HSS57步进电机驱动器,驱动器拥有2、4、8、16等级别的细分控制功能,由于细分控制采用电流闭环实现,故将其视为内闭环加入到控制系统中。步进电机模糊PID控制系统整体结构如图5所示。
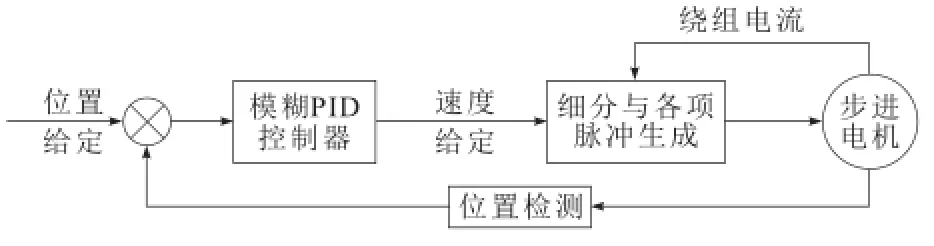
图5 步进电机模糊PID控制系统结构
在Matlab/Simulink模块中,将建立的模糊PID模块和步进电机模块连接,给定电机相关参数为:二相电机的电感为0.008 H、绕组电阻为2Ω、步距角为1.8°、最大磁链为0.01 Wb、转矩为2 N· m、转动惯量为1.6×10-4kg·m2,负载为1 N·m,驱动电压为24 V,采用8细分控制,设定步进脉冲频率为1.3 k Hz。经仿真运算,步进电机的输出转矩与转速如图6、图7所示。
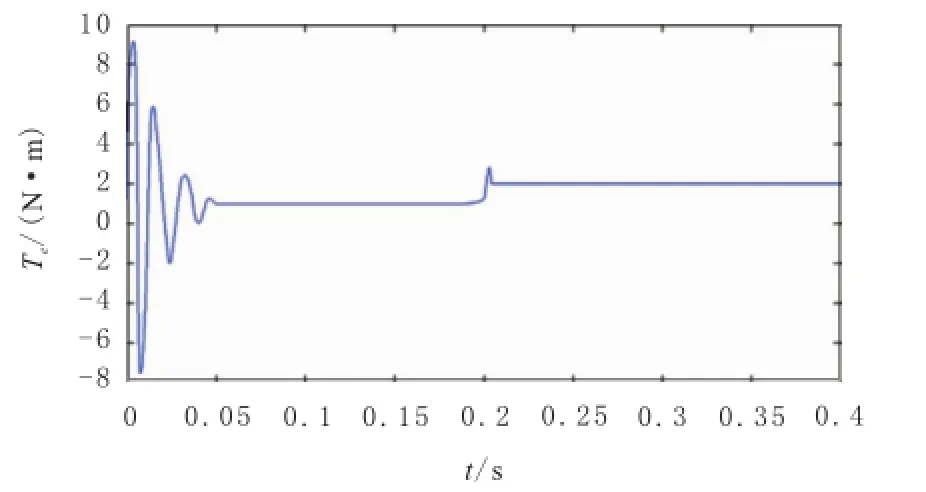
图6 模糊PID控制转矩响应曲线
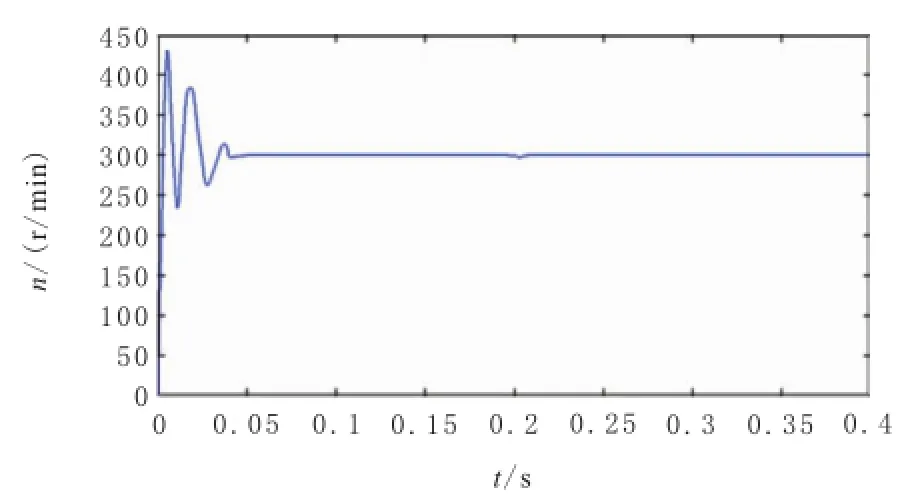
图7 模糊PID控制转速响应曲线
仿真结果表明,控制系统具有良好的稳定性和响应速度,开始阶段仅用0.05 s达到稳定,0.2 s负载加入后出现小幅震荡,整体变化平滑,在驱动机器人本体运动时能够满足精度的要求。
4 控制系统软件编程
4.1 控制程序整体结构
为保证良好的人机操作性,控制系统软件界面采用Lab VIEW编写,总体流程如图8所示。底层程序采用C语言[9]开发,各部分功能对应不同的函数命令,包括板卡初始化函数、参数写入函数、数据采集功能函数和模糊PID算法函数等。同时,将板卡的驱动协议和总线通讯协议也嵌入底层程序中,建立了完整的底层命令。将底层命令封装在动态链接库DLL中,需要完成某功能时,通过Lab-VIEW链接库[10]调用功能直接调用所需的函数命令。
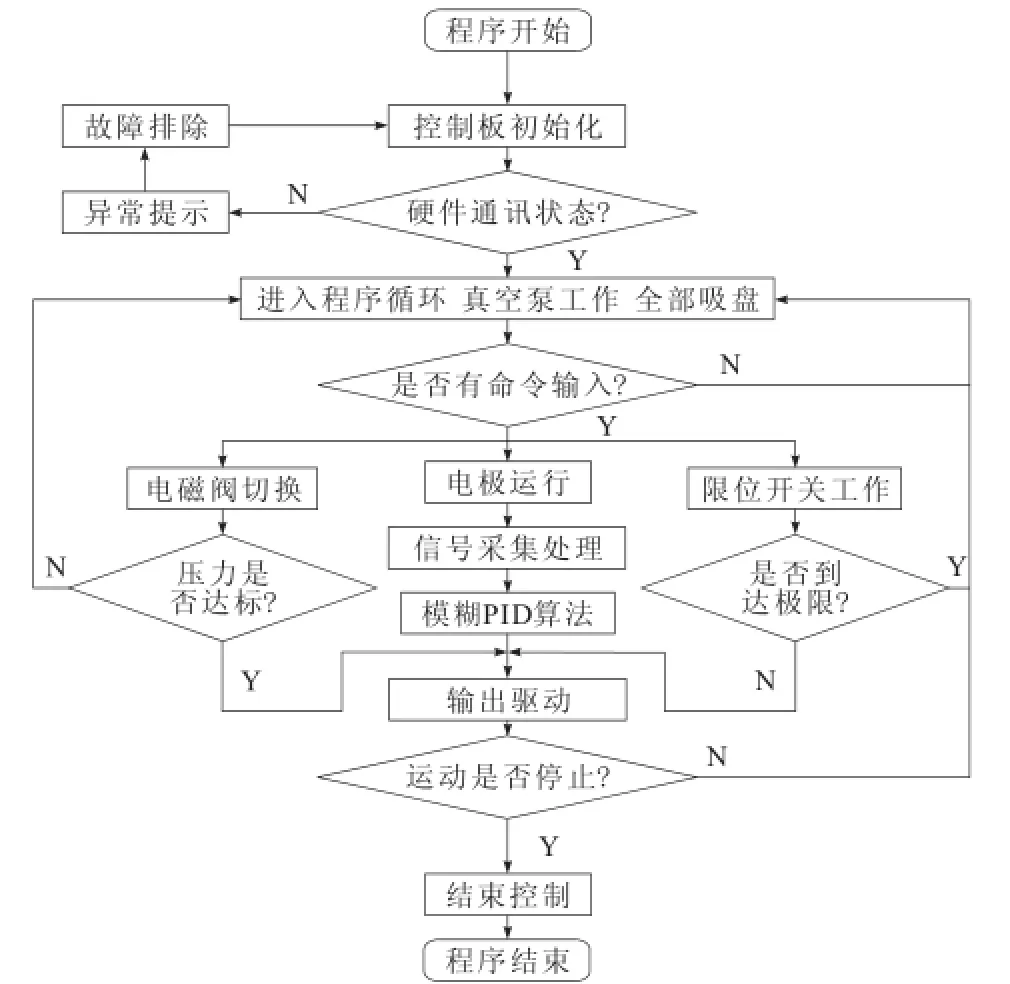
图8 控制程序流程
4.2 控制程序功能和特点
上位控制界面能够控制机械人完成前、后运动和左、右转弯动作,并有锁定功能。控制板的各种参数都在后台程序中设置了固定值,避免因参数设定不当引起故障。界面中前、后运行按钮为单击转化模式,左、右转弯按钮为单击触发模式,以上4个按钮为单项选择执行,任一按钮触发时,另外的按钮均无效。锁死按钮在程序执行中拥有最高优先级,可在意外突发时锁定机器人。正常情况下点击终止运行按钮,机械本体锁定后软件占用内存释放,程序结束。
控制程序采用多个子程序(VI)独立运行的方式,不同的子VI实现不同的功能,每个子VI中语句数量很小,保证了运行速率最大化。主程序将所有的子VI集合调用,执行时后台仅运行需要的子VI,这样大大减少主程序运行时内存的占用,实现了各个功能的模块化,使程序修改调整时更加便捷。
5 结束语
在玻璃幕墙机器人机械结构设计的基础上,完成了控制系统硬件部分的选型和搭建,并编写了相应的控制程序,采用模糊PID算法对步进电机进行精确的闭环控制,提高了机械本体运动的稳定性。在玻璃幕墙表面进行爬行实验,验证了本机械系统可在玻璃表面沿直线稳定运行,转弯时角度同样精确,具有较高的可靠性。
[1] Choi H,Park Y.Development of a biped walking robot actuated bya closed-chain mechanism[J].Education and Research in Robotics and Artificial Intelligence,2006,24(1):31-37.
[2] 刘淑霞,王炎.爬壁机器人技术的应用[J].机器人,1999,21(2):148-154.
[3] 兰州山海环保科技有限公司.吸附式双层全转角高楼玻璃幕墙自动清洗机:中国,201320161349[P].2013-10-16.
[4] 史敬灼.步进电机伺服控制技术[M].西安:西北工业大学出版社,1999.
[5] 孔利东.基于FPGA的数据采集与处理技术研究[D].武汉:武汉理工大学,2007.
[6] Kurazume R,Hirose S.Development of a cleaning robot system with cooperative positioning system[J].Autonomous Robots,2000,9(3):237-246.
[7] 刘川,刘景林.基于Simulink仿真的步进电机闭环控制系统分析[J].测控技术,2009,28(1):44-49.
[8] 段英红,杨硕.步进电机的模糊PID控制[J].计算机仿真,2006,23(2):290-293.
[9] 赵忆文,谈大龙.多移动机器人合作系统中的单机控制体系结构研究[J].机器人,1999,21(6):421-425.
[10] 陈福彬,柴海莉,高晶敏.基于Lab VIEW的自动化测试平台的设计[J].国外电子测量技术,2012,31(11):9-14.
Design of Control System for High-rise Buildings Glass-wall Cleaning Robot
LIU Yongping,ZHANG Shiyi,LIN Kabin
(School of Mechanical and Electronical Engineering,Lanzhou University of Technology,Lanzhou 730050,China)
To solve the problem of glass wall cleaning for high-rise buildings,this research developed a kind of glass curtain wall cleaning robot with a double layer structure,and designed the robot structure and wall climbing motion control system.The various hardware components of the control system are designed with FPGA chip at the core,and the host control software is written at the same time.Fuzzy PID algorithm is used to achieve closed-loop control of the stepper motor,and the motor is analyzed with Matlab.Simulation results indicates that the robot’s running status is stable and has high practicability.
mechanical structure;hardware design;fuzzy PID;simulation analysis;software programming
TP242
A
1001-2257(2015)09-0072-04
刘永平 (1973-),男,甘肃白银人,教授,硕士研究生导师,研究方向为数控技术、精密测控等。
版权声明
机械与电子杂志社
2015-04-17
各位作者:来稿凡经本刊录用,如无特殊声明,即视作投稿者同意授权本刊及本刊合作媒体复制、发行及进行信息网络传播。著作权使用费已包含在本刊所支付的稿酬中。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
橡塑技术与装备(2021年5期)2021-03-16
电子制作(2019年23期)2019-02-23
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
数学杂志(2017年3期)2017-06-15
少年文艺·开心阅读作文(2017年1期)2017-02-24
考古与文物(2016年5期)2016-12-21
火控雷达技术(2016年2期)2016-02-06
电测与仪表(2015年3期)2015-04-09
