
面向室外环境的单机器人辐射场寻源算法
2015-06-09 12:34倪诗翔王伟强苏衍宇吴冬梅
机械与电子 2015年9期
倪诗翔,王伟强,苏衍宇,吴冬梅
(1.哈尔滨工业大学机器人技术及系统国家重点实验室,黑龙江哈尔滨150001;2.解放军电子工程学院,安徽合肥 230031)
面向室外环境的单机器人辐射场寻源算法
倪诗翔1,王伟强2,苏衍宇1,吴冬梅1
(1.哈尔滨工业大学机器人技术及系统国家重点实验室,黑龙江哈尔滨150001;2.解放军电子工程学院,安徽合肥 230031)
0 引言
随着机器人技术的发展,自主移动机器人已经成功运用在危险生物、化学、辐射及火灾环境中,机器人的应用有效降低了危险环境对人的危害。在热辐射场、核辐射场、强电磁辐射场和声场中使用机器人搜寻辐射源,能最大程度减少人暴露在辐射环境中的时间,同时,这种搜寻方式准确、高效,具有极大的实用价值。
上述多种辐射场和声场有类似的分布特性,即在空气中辐射强度随着距辐射源的距离增大按固定的规律递减,遇到阻挡物时,发生反射、折射和衍射现象,阻挡物背后的强度分布呈不规则状态,且任意位置的强度分布无时变。因此,可以提出一种同时适用于上述4种辐射场的寻源算法。
目前,国际国内对声源和火源的定位搜寻研究较为成熟,对于放射源和其他电磁辐射源的搜寻研究尚处于起步阶段[1]。对于声源的搜寻,多采用麦克风阵列的方法,利用多个声音信号接收器来实现[2-4],而对于火源的搜寻,则多采用红外探测器探测环境中温度最高点来实现[5-6]。现有的场源定位搜寻算法都需要一套庞大且复杂的系统作为支持,不能靠单个移动机器人来实现,这使得寻源的成本极高,而且对于不同环境的适应性极差。
针对上述2个问题,提出了一种基于高斯过程回归,采用单个移动机器人实现对电磁辐射和声辐射源进行定位搜寻的方法,该寻源算法的实施不需要环境中复杂系统的支持,使得搜寻大大简化。同时,通过对WiFi信号源搜寻的实验,验证了所提算法的有效性。
1 高斯过程回归
在某一存在辐射源的环境中,辐射强度值最大的一点就是辐射源所在点。根据已知的某些点的辐射强度值,运用回归方法可以预测出未知点的辐射强度值。
传统的回归方法有神经网络法和支持向量机法等,但是这些方法只输出预测值,不能给出对预测值分布的估计。高斯过程回归与传统方法不同,不仅可以获得预测值,同时也能得到预测值的分布情况,即高斯分布的均值和方差,这十分有利于对辐射源的搜寻。
1.1 高斯过程[7]
高斯过程是一组随机变量的集合,该集合中的任意有限个随机变量都服从多元高斯分布,对于一个定义在指标集{χ}上的高斯过程{g(x):x∈χ,g(x)∈R}而言,它的均值函数为:
根据高斯过程存在性定理,可以通过将任意的实函数和正定函数分别作为均值函数和协方差函数,来构造一个高斯过程:

p是构造均值函数和协方差函数所用的参数,其维数由选择的函数决定。典型的协方差函数有线性函数、布朗运动函数、平方指数高斯过程函数(SE函数)和奥恩斯坦-乌伦贝克过程函数等。
1.2 预测
对于给定的训练集

xi和yi分别为自变量和因变量。n∈N1表示训练集的大小,高斯过程回归模型假设它的各个因变量,是取样自某未知分布的独立同分布随机变量,并将它描述为:









1.3 训练
训练集确定时,高斯过程回归的预测结果由因变量的先验分布决定。在选定均值函数和协方差函数后,该分部则由这2个函数和独立噪声的参数共同决定。这种定义先验分布的参数被称为超参数,即:

因此,高斯过程回归的训练过程包括2个环节:
a.确定均值函数和协方差函数。
b.通过最大似然法确定超参数。
均值函数和协方差函数需要根据具体问题选定,超参数则常通过求解如下优化问题获得:

其中,L(θ)=-log p(^y=y|x),p(^y=y|x)是出现训练集样本^y=y时先验概率分布的概率密度函数值。
2 方法
2.1 方法概论
本文所研究的控制算法主要分为2步:高斯过程回归对平面辐射场的在线预测;求解最优化问题获得机器人的移动方向。算法的流程如图1所示。
该算法的原理如下:
a.机器人进入搜寻区域,测出其所在栅格的辐射场强值,获取所在栅格邻域(附近8个栅格)的信息,包括栅格中有无障碍物和各栅格已经走过的次数,使用高斯过程回归预测出邻域中各栅格场强的均值和方差。
b.机器人计算附近邻域中各栅格的回报函数,选取回报函数值最大的栅格作为下一步的路径点。
c.机器人移动到下一个栅格,测量该栅格的场强值,获取邻域各栅格的信息,之后根据已知的全部实际场强值继续预测附邻域各栅格场强的均值和方差。
d.重复步步骤b和步骤c,直至机器人行走至辐射场强大于阈值的栅格。

图1 算法流程
2.2 搜索区域的离散化
对于辐射源的搜寻,当机器人到达与辐射源距离足够小的位置时即可认为搜寻成功,因此,采用参考文献[8]的方法对搜索区域进行离散化,用边长lc的正方形栅格划分搜索区域。在搜索过程中,机器人可以从一个栅格移动到另一个栅格,测量辐射强度值只在栅格的中心点处进行,以该点的辐射强度值代表该栅格的辐射强度值。
在初始时刻,机器人对环境未知,机器人每行走一步可以通过自身的传感器获得附近8个栅格的信息,机器人的邻域即定义为其附近的8个栅格。
假设一个矩形搜索区域在X和Y方向的长度分别为LX和LY,则X和Y方向可划分的栅格数M、N分别为:

ceil(x)为取不小于x的最小整数。由此,定义搜索区域S为:

对于离散化的栅格,若某一栅格中存在障碍物则认为该栅格不可进入,将该栅格标记为黑色,如果某一栅格中任何位置都不存在障碍物,则该栅格为可进入栅格,将该栅格标记为白色。
2.3 基于高斯过程回归的环境辐射强度分布估计
为完成对辐射源的搜寻,需要得知辐射源在环境平面中的位置,故需要对环境平面的辐射强度分布进行估计。解决这一问题的原理是让机器人在环境平面不同位置测量辐射强度值,使用高斯过程回归利用有限的信息推测全局信息。
定义高斯过程回归的训练集为:

x1,x2分别为机器人所在点的笛卡尔坐标值;Ix为x点处的实际辐射强度值。
使用高斯过程回归,首先要确定均值函数和协方差函数。本文采用无阻挡环境下的辐射强度分布函数作为高斯过程回归的均值函数,采用平方指数函数作为协方差函数,即

其中,σf值取8.2,l值取17。
对于给定的训练集D,高斯过程回归针对8个预测点的输出是均值μ和方差σ,μ表示场强的预测值,σ表示预测值的不确定度。
2.4 回报函数求解
回报函数U为3个函数的乘积,即

此处,u1(x*)为Deisenroth等提出的高斯过程信息熵[9],参数ρ和β控制机器人行走的趋势,当ρ较大时,机器人趋向于朝场强大的方向行走,当β较大时,机器人趋向于朝信息量更大的方向行走。寻源过程中采用动态的ρ和β参数值,即
u2(x*)控制机器人向没有走过的地方行走,其中n(x*)为机器人经过x*点的次数。
u3(x*)实现机器人的避障性能,对于有障碍物的栅格,u3(x*)及U(x*)将始终为0。
机器人在某一个栅格处通过上式计算出附近8个栅格的回报函数后,选取回报函数值最大的栅格作为下一步的路径点。
3 实验
在真实的室外环境中验证了基于高斯过程回归的辐射源定位算法,并给出具体的实验设置和实验结果。
3.1 实验设置
实验环境为一个300 m×200 m的室外环境,如图2所示。图2中白色部分为道路,是机器人的可行域,其他部分是建筑物、树丛以及河流等阻挡物,是不可通行的区域。黑色圆点处为辐射源所在位置,三角形处为机器人的初始位置。

图2 搜索区域地图
用边长lc=5 m正方形栅格对地图进行栅格化,得到离散化的地图如图3所示。
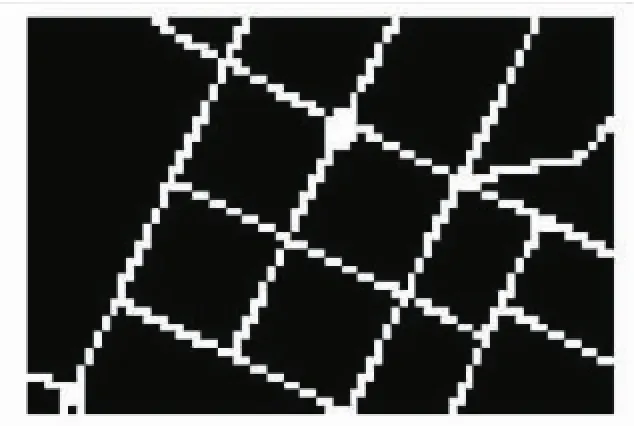
图3 栅格化的搜索区域
实验所用机器人为实验室研制的TJ-1机器人。机器人本体载有1台PC机作为机器人的上位机,激光测距仪(URG-04LX)用于检测障碍物,WiFi信号接收器(TL-WN722N)作为辐射强度检测仪,GPS定位器(MEMSICNAV 440,定位精度2.5 m)用于机器人定位。电磁波辐射源是TLWDR6500无线路由器,该路由器产生2.4 GHz的WiFi信号。
实验中,以机器人所在栅格的笛卡尔坐标值作为训练集的自变量,以接收到的WiFi信号的功率作为辐射强度值,即训练集的因变量,辐射强度的阈值设定为-42 dBm。由于机器人的起始位置接近地图的左上角,因此在搜寻前假定放射源位于地图的右下角,由此确定均值函数中的超参数为(56,38)。
3.2 实验结果
机器人搜寻辐射源的过程如图4所示。图4a为搜寻初期,机器人向假定的辐射源所在位置靠近,同时获得尽量多的环境信息,扩大训练集。图4b为搜寻的中期,机器人在探索更多的未知区域。图4c为搜寻的后期,机器人在获得了足够大的训练集后,迅速靠近辐射源。图4d为搜寻的结果,机器人最终停留在辐射源所在栅格中。

图4 辐射源搜寻结果
4 结束语
将高斯过程回归引入辐射源的搜寻,提出了一种全新的辐射场寻源算法,研究内容包括:对搜索区域进行栅格化,采用高斯过程回归预测邻域辐射强度值,通过求回报函数的最大值对机器人进行局部轨迹规划,通过多次局部轨迹规划使机器人到达全局最优点。
在提出算法后,通过WiFi辐射场寻源实验验证了算法的有效性。实验结果证明,该算法能够以单机器人在300 m×200 m的室外环境中定位WiFi信号源。算法对辐射源的定位精度取决于栅格的边长lc。
[1] Krishnanand K N.Glowworm swarm optimization:a multimodal function optimization paradigm with applications to multiple signal source localization tasks[D].Indian:Department of Aerospace Engineering,Indian Institute of Science,2007.
[2] 赵秀粉.基于麦克风阵列的声源定位技术研究[D].成都:电子科技大学,2013.
[3] Tuma J,Janecka P,Vala M,et al.Sound source localization[C]//2012 13th International Carpathian Control Conference(ICCC),2012:740-743.
[4] Valin J M,Michaud F,Rouat J,et al.Robust sound source localization using a microphone array on a mobile robot[C]//International Conference on Intelligent Robots and Systems,2003:1228-1233.
[5] Wang S,Berentsen M,Kaiser T.Signal processing algorithms for fire localization using temperature sensor arrays[J].Fire Safety Journal,2005,40(8):689-697.
[6] 康一梅,杨恩博,杨鑫凯.基于改进蚁群算法的火源定位策略研究[J].计算机工程与应用,2012,48(2):207-210.
[7] Seeger M.Gaussian processes for machine learning[J].International Journal of Neural Systems,2004,14(2):69-106.
[8] 王阳,孟庆浩,李腾,等.室内通风环境下基于模拟退火算法的单机器人气味源定位[J].机器人,2013,35(3):283-291.
[9] Deisenroth M P,Rasmussen C E,Peters J.Gaussian process dynamic programming[J].Neurocomputing,2009,72(7):1508-1524.
A Radiation Source Searching Algorithm Used for a Single Robot in Outdoor Environment
NI Shixiang1,WANG Weiqiang2,SU Yanyu1,WU Dongmei1
(1.State Key Laboratory of Robotics and System,Harbin Institute of Technology,Harbin 150001,China;2.Electronic Engineering Institute of PLA,Hefei 230031,China)
针对室外热辐射场、核辐射场、强电磁辐射场和声场的辐射源搜寻,提出了一种基于高斯过程回归的单机器人辐射源搜寻算法。首先将连续的搜寻环境离散化,采用高斯过程回归预测机器人邻域中的辐射强度,然后将局部路径规划考虑为一个优化问题,求取优化目标函数的最大值获得机器人的下一步路径点,最后通过多次局部路径规划引导机器人到达全局最优点。为验证所提算法的有效性,在300 m×200 m的室外环境中进行了实验。
室外环境;单机器人;寻源算法;辐射场
Aiming at searching the source of thermal radiation fields,nuclear radiation fields,strong electromagnetic radiation fields and sound fields in outdoor environment,a source searching algorithm based on Gaussian Process Regression using a single robot is proposed.First of all,the continuous searching area is discretized with square grids,and the radiation intensity of adjacent grids is predicted by Gaussian Process Regression.Then a local path planning is considered to be an optimization problem and the next path point is obtained by solving the problem.Finally,the robot is guided to the global optimal point through repeated local path planning.To verify the proposed algorithm,an experiment in an environment of 300 m×200 m has been conducted.
outdoor environments;single robot;source searching algorithm;radiation field
TP241
A
1001-2257(2015)09-0067-05
倪诗翔(1990-),男,四川西昌人,硕士研究生,研究方向为特种环境移动机器人;王伟强 (1976-),男,安徽合肥人,工程师,研究方向为建筑与环境建模技术;苏衍宇 (1986-),男,湖南株洲人,博士研究生,研究方向为智能机器人控制及工业自动化;吴冬梅 (1968-),女,黑龙江哈尔滨人,博士研究生导师,教授,研究方向为医疗机器人技术。
2015-04-27
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
北京航空航天大学学报(2020年10期)2020-11-14
空间科学学报(2020年6期)2020-07-21
雷达学报(2018年5期)2018-12-05
雷达学报(2018年3期)2018-07-18
电子设计工程(2017年20期)2017-02-10
天津城建大学学报(2015年5期)2015-12-09
弹箭与制导学报(2015年1期)2015-03-11
雷达学报(2014年4期)2014-04-23
空间控制技术与应用(2014年2期)2014-04-17
